机器人初识 —— 电机传动系统
一、背景
波士顿动力公司开发的机器人,其电机传动系统是其高性能和动态运动能力的核心部分。电机传动系统通常包括以下几个关键组件:
1. **电动马达**:波士顿动力的机器人采用了先进的电动马达作为主要的动力源,如伺服电机或步进电机。这些电机具有高扭矩密度、快速响应和精确控制的特点,能够提供机器人所需的强大驱动力和精细动作。
2. **减速器与传动机构**:由于电机自身的转速往往很高,为了将高速旋转转化为更大的力矩输出以驱动机器人的关节,通常会采用精密的减速器(例如谐波减速器、行星齿轮减速器等)。通过减速器可以实现力量放大,并确保在不同负载和速度下的稳定运行。
3. **控制系统**:电机传动系统的控制单元极为重要,它基于高级算法对电机进行实时反馈控制,确保机器人各关节准确执行预定的动作指令。波士顿动力利用复杂的电子控制器来监测和调整电机的速度、位置和力矩,实现了高精度的运动控制。
4. **能源管理**:虽然信息中没有直接提及电池技术,但波士顿动力必须解决电池供电问题,确保电机传动系统能在有限的电能供应下高效运作。这涉及到电池容量优化、能量回收机制以及智能电源管理系统的设计。
5. **机械设计**:电机传动系统需要与机器人整体结构紧密集成,机械设计需考虑如何减少摩擦损失、提高效率并保持轻量化。例如Atlas机器人使用的紧凑型电机和连杆结构就是为了达到这样的目的。
总之,波士顿动力的电机传动系统是高度集成且精密的工程成果,通过不断创新与优化,使得其机器人具备了令人惊叹的敏捷性、平衡性和强大的承载能力。

此图片来源于网络
二、四足还是两足
波士顿动力公司的四足机器人和两足机器人的区别主要在于它们的机械结构、运动方式以及应用场景的不同:
1. **四足(Quadruped)机器人**:
- 结构设计:四足机器人拥有四个行走脚,如波士顿动力的Spot系列机器人。这种结构模仿了动物界的四足动物(如狗或马),提供了更稳定的支撑基础和更大的地形适应能力。
- 运动模式:四足机器人能够在各种复杂地形上行走、奔跑、攀爬,甚至跳跃,通过四肢的协调动作实现动态平衡和灵活移动。
- 应用场景:由于其出色的稳定性与灵活性,四足机器人适用于多种环境下的任务,包括搜索与救援、危险区域探测、建筑工程监测、科研实验等。
2. **两足(Bipedal)机器人**:
- 结构设计:两足机器人具有两个类似人腿的机械结构,比如波士顿动力的Atlas机器人。这类机器人模仿人类的步态和姿态控制,更侧重于直立行走和模仿人类的精细操作。
- 运动模式:两足机器人的运动更加类似于人类,需要复杂的平衡算法来保持直立,并能够执行如跳跃、跑步、甚至是体操动作等相对复杂的运动。
- 应用场景:两足机器人在仿生学研究、探索人类行动机制、潜在的人工智能助手、灾难响应及特定工业环境中执行需要双臂操作的任务等方面有独特优势。
总的来说,四足机器人更适合在户外、不规则地面或复杂环境中进行工作,而两足机器人则倾向于模仿人类行为,能在更为精细的动作需求下发挥作用,但通常对于平衡控制的要求更高,且在非平坦地面的稳定性和机动性方面较四足机器人有一定限制。

此图片来源于网络
三、双足与四足的电控系统
在电机传动系统方面,四足机器人与双足机器人的设计和实现有所不同,主要体现在以下几个方面:
1. **负载分布与平衡**:
- 四足机器人:由于有四个接触点(脚),电机传动系统需要分散到各个腿上,以维持机器人在不同步态下的稳定性和平衡性。每个电机及其传动装置都需要独立控制,并协同工作,使得机器人能够在复杂地形上行走、跳跃或奔跑。
- 双足机器人:只有两个接触点(脚),所以对于电机传动系统的控制要求更为严格,因为它们必须在每次单脚支撑时都能保持动态平衡。这意味着电机需要提供足够的力矩来支持整个机器人的重量,并快速响应以调整姿态。
2. **关节自由度与运动学**:
- 四足机器人:通常拥有更多的关节自由度,例如每条腿可能包含髋关节、膝关节和踝关节等多处旋转轴。因此,其电机传动系统可能包括多个伺服电机及相应的减速器,以驱动这些关节进行复杂的三维运动。
- 双足机器人:虽然关节也较为复杂,但总体上的自由度数量可能相对较少,尤其是考虑到人类行走时的对称性和步态效率。双足机器人的电机传动系统同样需要精确控制各关节,但由于平衡需求更高,某些关节可能需要更高的扭矩输出和更精细的位置控制。
3. **能量消耗与效率**:
- 四足机器人:由于有更多的支点,可能在某些特定步态下具有较高的能源效率,特别是在不平坦地面或崎岖环境中,通过分散载荷可以减少单个电机的压力。
- 双足机器人:由于需要持续保持直立且仅依赖两个支撑点,能耗可能会更高,尤其是在进行动态平衡时,需要频繁地做出细微调整,这可能导致更大的电能消耗。
4. **硬件设计与集成**:
- 两种机器人都需要紧凑、轻量化的电机和传动装置设计,但具体布局和结构会根据各自的需求有所不同。四足机器人可能需要考虑如何均衡分配动力源,而双足机器人则更多关注于腿部关节结构的设计以及腰部和躯干的支撑。
5. **控制算法**:
- 控制算法是电机传动系统的重要组成部分,无论四足还是双足机器人,都需要复杂的控制系统来协调电机的工作。但双足机器人的步态规划和平衡控制算法通常更为复杂,需要处理高维度的动力学问题。
总结来说,在电机传动系统方面,四足和双足机器人的主要区别在于力学原理的不同导致的负载分布、关节配置和控制策略差异,这些因素共同决定了电机选择、传动方式以及系统集成的具体方案。
四、机器人电机传动系统难点
机器人电机传动系统的设计和开发中存在诸多技术难点,尤其是对于高性能、高动态要求的机器人(如波士顿动力公司的四足或双足机器人)来说,这些难点包括但不限于以下几个方面:
1. **高精度控制**:
- 为了实现精细的动作控制和良好的运动性能,需要对电机的速度、位置和力矩进行极高精度的控制。这涉及到高级伺服驱动器设计以及实时反馈控制系统。
2. **高扭矩密度**:
- 机器人的关节通常需要在有限的空间内提供大的转矩输出,这就要求电机具有很高的扭矩密度。研发高功率密度的电动马达与高效减速器是关键挑战。
3. **快速响应能力**:
- 机器人在执行动作时可能需要在短时间内做出大幅度的力矩变化,例如在平衡调整或快速移动时。因此,电机及传动系统必须具备极高的动态响应速度。
4. **低背隙与零间隙**:
- 减速器及其他传动机构中的背隙和机械间隙会导致机器人关节运动不精确。减少甚至消除传动链中的间隙有助于提高定位精度和重复性。
5. **耐用性与可靠性**:
- 机器人在长时间、复杂工况下运行时,电机和传动部件需要经受住磨损、振动、温度变化等考验。提高整体系统的可靠性和寿命是设计时的重要目标。
6. **能量效率**:
- 为延长电池寿命并降低运行成本,电机传动系统需优化能源利用效率,尤其是在机器人应用场合,需要尽可能减少不必要的能耗。
7. **小型化与轻量化**:
- 对于行走机器人,特别是仿生类机器人,减轻重量对于保持动态稳定性和提高运动性能至关重要。因此,电机和传动装置需要在满足性能需求的同时做到紧凑且轻巧。
8. **集成化设计**:
- 高度集成化的电机与传动组件可以简化装配过程,减小体积,并提高系统的综合性能。将传感器、控制器和执行器一体化设计是现代机器人发展的趋势之一。
9. **热管理**:
- 高性能电机在工作过程中会产生大量热量,如果散热不良,会直接影响到电机性能和寿命。因此,如何有效地进行热管理和冷却也是传动系统设计中的重要考量点。
10. **噪声控制**:
- 在某些应用场景中,例如服务机器人或者安静环境下的操作,还需要考虑传动系统的噪声控制,确保其运行时产生的声音在可接受范围内。
总之,机器人电机传动系统的设计是一个多学科交叉的技术领域,涉及材料科学、电子工程、机械设计、控制理论等多个方面的知识和技术集成。
五、机器人的电机特殊之处
波士顿动力公司制造的机器人,其电机传动系统具有如下特殊之处:
1. **高性能伺服电机**:波士顿动力的机器人通常采用高性能伺服电机,这类电机能提供高扭矩密度和快速响应速度,确保机器人在执行复杂动作时能够实现精确控制。伺服电机可以实时接收并响应控制器的指令,进行位置、速度和力矩的精细调整。
2. **定制化设计**:由于机器人的运动需求多样且苛刻,如Atlas双足机器人和Spot四足机器人的关节需要模拟生物体的动作,因此电机及其驱动器往往需要根据具体应用进行定制设计,以满足机器人所需的高强度、高速度以及动态范围大的要求。
3. **集成化与紧凑性**:为适应机器人结构的轻量化和小型化需求,电机和减速器等组件必须高度集成,形成体积小、重量轻的动力模块,同时保证足够的输出功率和扭矩。
4. **低摩擦与高效传动**:为了减少能量损失,提高效率,传动系统的齿轮、轴承和润滑系统都需精心设计,降低机械内部的摩擦系数,并通过精密加工工艺来减小间隙和背隙。
5. **强耐久与散热能力**:考虑到机器人可能面临的极端工作条件,电机和传动部件必须具备极高的耐用性和良好的热管理性能,以应对长时间连续运行或突发大负载下的挑战。
6. **智能控制算法支持**:电机传动系统不仅要硬件优秀,还需配合先进的控制算法,比如自适应控制、预测控制和深度学习优化等,使得电机能够在各种复杂的物理环境中实时作出最优响应。
综上所述,波士顿动力机器人的电机传动系统不仅在技术参数上有别于常规电机,更在于它们是整个机器人控制系统中的核心组件,紧密整合了硬件和软件的尖端技术,从而实现了机器人前所未有的灵活性、敏捷性和力量表现。
六、减速机是必须的吗
在波士顿动力的机器人中,减速器通常被视为电机传动系统中的关键组成部分,虽然不是所有情况下都必须使用减速器,但在高性能、高精度机器人应用中,减速器几乎是不可或缺的。原因包括:
1. **力矩放大**:伺服电机输出的扭矩往往不足以直接驱动机器人的关节进行大范围和大力度的动作。通过减速器可以将电机高速旋转产生的小扭矩转换为低速的大扭矩输出,从而满足机器人对力量的要求。
2. **速度匹配**:机器人的关节运动速度通常远低于电机的转速,减速器的作用在于调节电机与机器人关节之间的速度比,使得关节能够以适宜的速度进行动作。
3. **精确控制**:减速器能提高电机控制系统的分辨率,通过降低输出轴的速度,可以让控制系统更准确地定位和控制关节的位置、速度和力矩。
4. **保护电机**:通过降低负载端的转速,减速器还可以防止电机在高负载下过热或损坏,延长电机的使用寿命。
因此,在波士顿动力的四足或双足机器人等复杂机器人设计中,减速器是确保机器人实现高效稳定运动的重要组件。当然,对于某些特殊应用场景或轻载荷需求的机器人,可能可以选择不使用减速器或者采用不同类型的传动机构来替代。
七、机器人电机传动系统成本分析
机器人电机传动系统是决定机器人性能和成本的重要组成部分。对于波士顿动力等高端机器人的电机传动系统,其成本分析通常包括以下几个方面:
1. **伺服电机**:
- 高精度伺服电机的研发和制造成本高,尤其是那些需要提供大扭矩、快速响应和长时间稳定运行的电机。
- 伺服电机内部使用的高质量磁性材料(如高性能钕铁硼永磁体)、绕组材料、轴承以及先进的驱动控制电子元件都会显著增加成本。
2. **减速器**:
- 减速器作为将电机高速旋转转化为机器人关节所需低速大扭矩的关键部件,其成本同样不菲。
- RV减速器和谐波减速器等精密减速器由于结构复杂、加工精度要求极高,导致生产成本较高。特别是用于工业机器人或波士顿动力这类高动态机器人的减速器,需要承受较大的冲击载荷并保持长期稳定的高精度运转。
3. **控制系统与传感器**:
- 实现电机精确控制所需的高级控制器、编码器和其他反馈传感器也是成本的重要来源。
- 高级控制算法和软件开发也属于间接成本,这些技术确保了电机传动系统的高效、稳定和精准操作。
4. **研发与定制化设计**:
- 波士顿动力等公司为满足特定机器人需求而进行的研发投入巨大,包括对新概念的设计验证、原型制作、测试优化等过程产生的费用。
- 定制化的机械结构、热管理方案、集成封装设计也会增加整体成本。
5. **规模化生产与供应链管理**:
- 尽管大规模生产有助于降低单个产品的成本,但初期的生产线投资和技术积累往往十分昂贵。
- 优质零部件供应商的选择及维护关系也需要投入相应的资源,尤其在关键部件依赖进口时,供应链成本可能较高。
6. **质量保证与可靠性测试**:
- 高端机器人产品必须经过严格的质量检测与可靠性测试,以确保能在各种环境下稳定工作,这部分投入也是成本构成的一部分。
综上所述,机器人电机传动系统的成本主要由核心硬件成本(电机、减速器)、控制电子设备成本、研发与设计成本、生产和供应链管理成本以及质量保证成本等多方面因素共同决定。对于波士顿动力这样的先进机器人制造商而言,每个环节的成本控制都至关重要,同时它们的产品定位也决定了不会牺牲必要的性能以降低成本,因此其电机传动系统的总成本会相对较高。
八、附录:减速器
RV减速器与谐波减速器是两种在工业机器人领域广泛应用的精密减速器,它们具有不同的工作原理、结构特点和应用场合:
RV减速器(Rotary Vector Reducer):
- 工作原理:RV减速器采用行星齿轮传动原理,通过蜗杆和摆线针轮啮合实现大传动比的减速。蜗杆驱动摆线轮进行运动,摆线轮内部的针齿面与输出的柔轮接触,从而将输入轴的旋转运动转换为输出轴的低速高扭矩转动。
- 特点:RV减速器具有高承载能力、刚性好、传动效率高、寿命长、可靠性高等优点,适用于承受较大载荷和冲击的场合。
- 应用场合:通常用于工业机器人的大关节,如肩关节、髋关节等重负载位置,特别是那些需要大扭矩传输和精确控制的20公斤以上的大型机器人。
谐波减速器(Harmonic Drive Gearbox):
- 工作原理:谐波减速器利用弹性变形原理工作,由三个基本部件组成:固定不动的柔轮、带有柔性轴承的波发生器和刚性的外齿圈。当波发生器转动时,迫使柔轮产生径向收缩并形成椭圆形状,从而与外齿圈啮合传递动力。
- 特点:谐波减速器的特点是体积小、重量轻、传动精度高、传动比大、无回差、噪声低等,适合于需要精确定位和小体积的应用环境。
- 应用场合:主要用于工业机器人的小关节,例如肘关节、腕关节、手指关节等部位,尤其是对于15-20公斤以下的小型或中型机器人以及要求高速响应、精密定位的任务场景。
总结来说,RV减速器和谐波减速器各有优势,在选择使用时会根据机器人的负载需求、运动精度、工作环境以及成本等因素综合考虑。
相关文章:
机器人初识 —— 电机传动系统
一、背景 波士顿动力公司开发的机器人,其电机传动系统是其高性能和动态运动能力的核心部分。电机传动系统通常包括以下几个关键组件: 1. **电动马达**:波士顿动力的机器人采用了先进的电动马达作为主要的动力源,如伺服电机或步进…...
安卓游戏开发之音频技术优劣分析
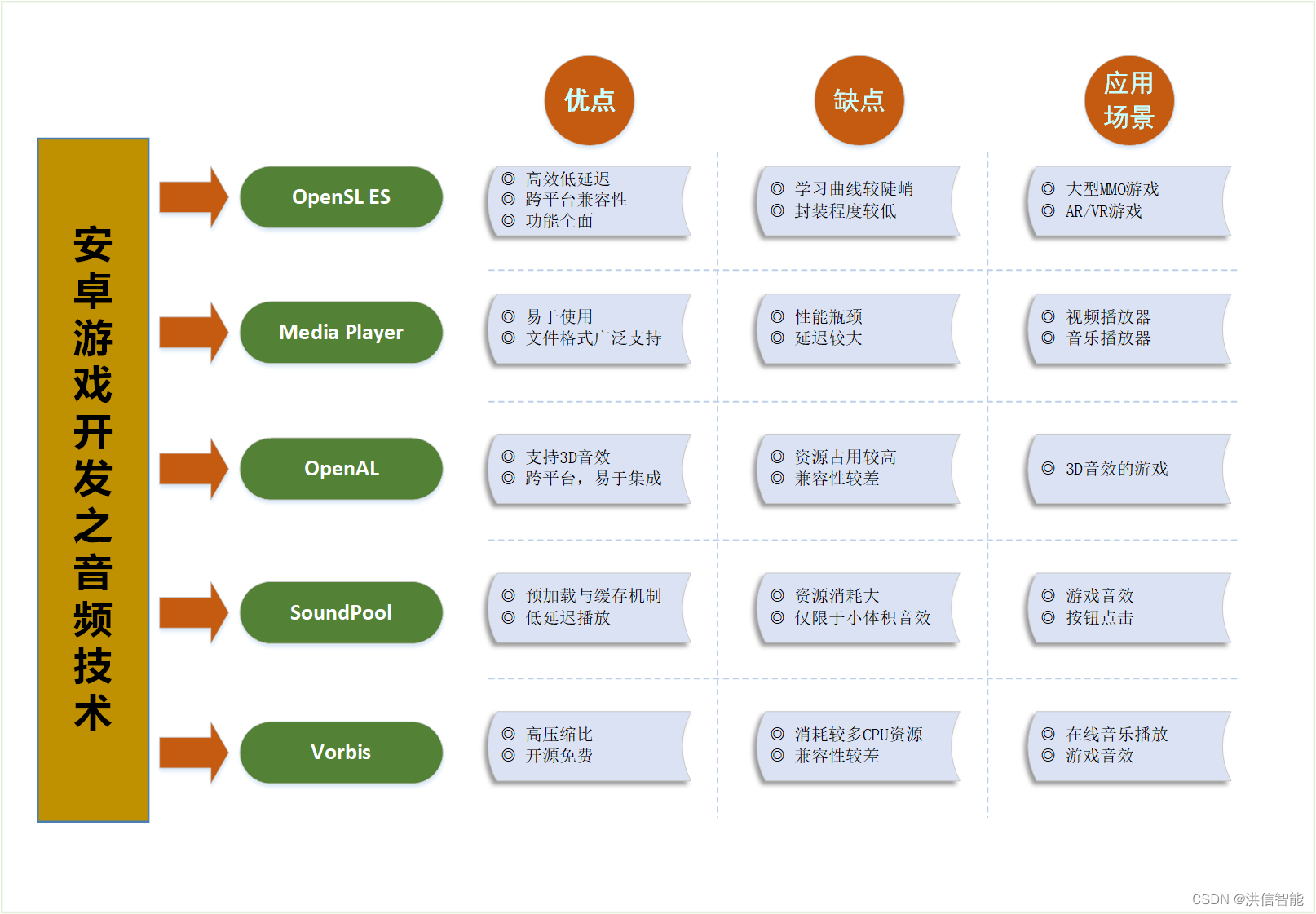
一、引言 在安卓游戏开发中,音频处理技术扮演着至关重要的角色,它不仅能够增强游戏的沉浸感和玩家体验,还能通过声音效果传达关键的游戏信息。以下将对几种常见的安卓游戏音频处理技术进行优劣分析,并结合应用场景来阐述其特点。 …...

在C语言中,设置Linux系统时间
C 语言中使用 mktime 函数和 stime 函数来处理时间。 处理之前,需要先获取当前的时间戳。并使用当前的时间戳生成struct tm,struct tm是C语言中用于表示日期和时间的结构体,通常用于在程序中操作和处理日期时间信息。它包含了以下成员变量&a…...

golang k8s包管理工具
k8s包管理工具Helm Helm简介Helm基础概念Helm安装Helm命令Helm Chart(图表)Chart语法Chart变量替换Chart模板控制结构Chart模板函数Chart迭代和范围Helm Values(值)Helm Release(发布)Helm Repository&…...
数字信号处理:傅里叶分析
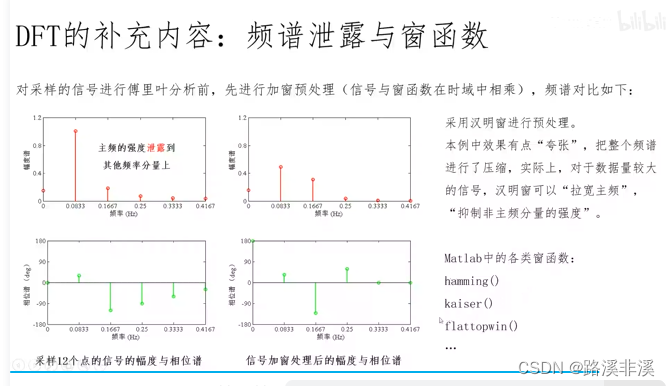
本文主要参考视频如下: 数字信号处理9-1_线性时不变系统对复指数信号的响应_哔哩哔哩_bilibili 傅里叶分析的主要研究内容如下所示: 注意,计算机中使用的离散傅里叶变换并不是离散时间傅里叶变换; 前四种都是理论上的变换方式&…...

pat 甲级 1051 Pop Sequence
思想:如果要弹出一个数,那么说明比它小的数字已经进栈了,所以要在一个数num输入之后把比它小的数都输入到栈中,直到栈满或者valnum时结束入栈操作。如果valnum,将这个值弹出,否则说明整个序列存在问题,把fl…...

Stable Diffusion 绘画入门教程(webui)-ControlNet(深度Depth)
上篇文章介绍了线稿约束,这篇文章介绍下深度Depth 文章目录 一、选大模型二、写提示词三、基础参数设置四、启用ControlNet 顾名思义,就是把原图预处理为深度图,而深度图可以区分出图像中各元素的远近关系,那么啥事深度图…...
Rust-知多少?
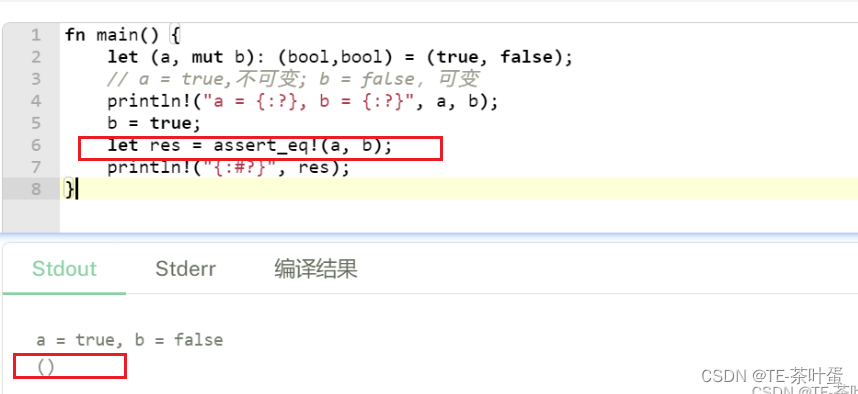
文章目录 前言1.使用下划线开头忽略未使用的变量2. 变量解构3.常量4.变量遮蔽(shadowing)5. 类似println!("{}", x); 为啥加感叹号6.单元类型7. -> 运算符到哪去了?总结 前言 Rust 学习系列,记录一些rust使用小技巧…...

Qt不规则可移动窗体的实现
实现: 可以借助不规则的位图来实现不规则窗体,并支持拖动和移动。下面分别是头文件和源文件 #ifndef SHAPEWIDGET_H #define SHAPEWIDGET_H#include <QWidget>class ShapeWidget : public QWidget {Q_OBJECTpublic:ShapeWidget(QWidget *parent …...
Jakarta Bean Validation
Validation 官网 https://beanvalidation.org/ 常见注解 Bean Validation中定义的注解: 注解详细信息Null被注释的元素必须为 nullNotNull被注释的元素必须不为 nullAssertTrue被注释的元素必须为 trueAssertFalse被注释的元素必须为 falseMin(value)被注释的元素…...
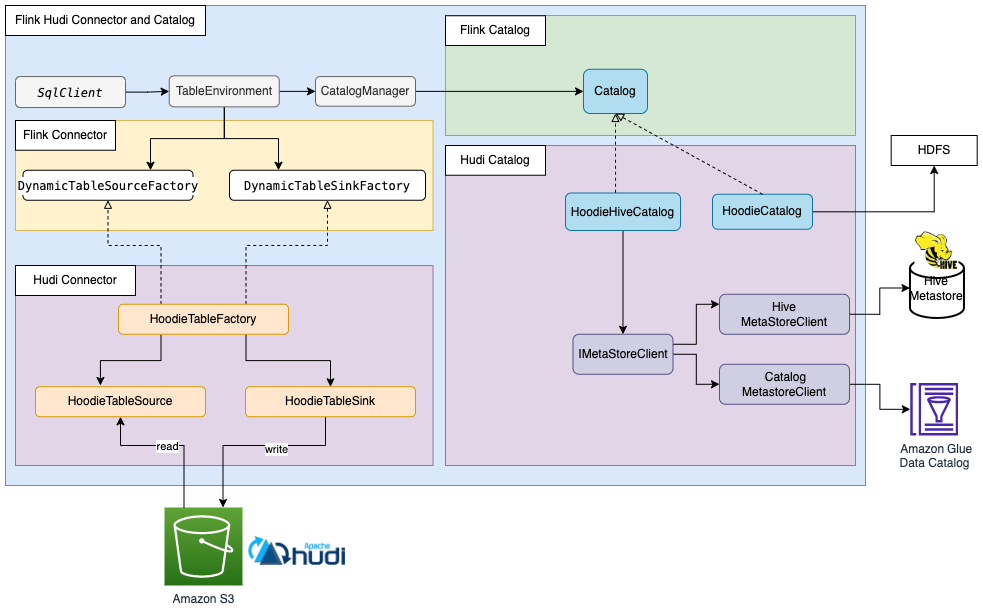
Flink Catalog 解读与同步 Hudi 表元数据的最佳实践
博主历时三年精心创作的《大数据平台架构与原型实现:数据中台建设实战》一书现已由知名IT图书品牌电子工业出版社博文视点出版发行,点击《重磅推荐:建大数据平台太难了!给我发个工程原型吧!》了解图书详情,…...

git 使用总结
文章目录 git merge 和 git rebasegit mergegit rebase总结 git merge 和 git rebase git merge git merge 最终效果说明: 假设有一个仓库情况如下,现需要进行 merge: merge 操作流程: merge 的回退操作: git reba…...

【Elasticsearch专栏 01】深入探索:Elasticsearch的正向索引和倒排索引是什么
文章目录 什么是Elasticsearch的正向索引和倒排索引?1.倒排索引(Inverted Index)2.正向索引(Forward Index)3.小结 什么是Elasticsearch的正向索引和倒排索引? 首先,要明确的是,Ela…...

Linux、Ubuntu、CenterOS、RedHat、Debian、AIpine关系和区别?
目录 1. 区别和联系 2. 安装命令 3. 其他发行版本 4. 拓展知识 Linux 内核和操作系统发行版的关系-CSDN博客 5.参考 1. 区别和联系 Ubuntu, Debian, RedHat, CentOS都是不同的Linux发行版。 Ubuntu 是基于Debian的一个开源GNU/Linux操作系统。它的目标是为一般用户提供…...

微信小程序开发:通过wx.login()获取用户唯一标识openid和unionid
下面代码展示了 openid 的获取过程。 想获取 unionid 需要满足条件:小程序已绑定到微信开放平台账号下,不然只会返回 openid。 【相关文档】 微信小程序开发:appid 和 secret 的获取方法 wx.login({success (res) {if (res.code) {// 发起网…...
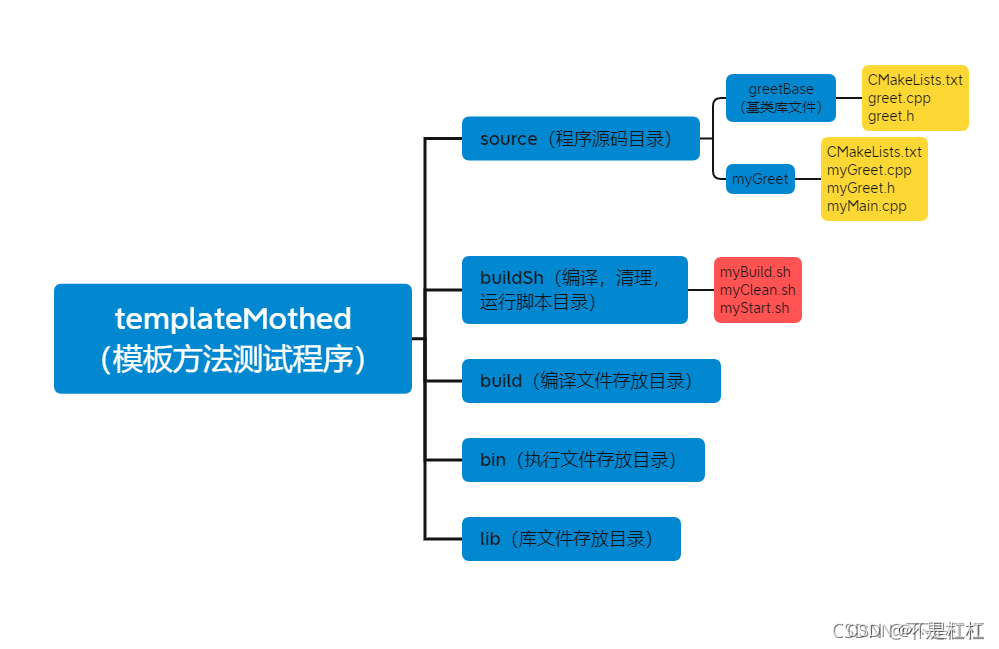
设计模式之模板方法
模式定义 定义一个操作中的算法的骨架 (稳定),而将一些步骤延迟(变化)到子类中。Template Method使得子类可以不改变(复用)一个算法的结构即可重定义(override 重写)该算法的某些特定步骤。 …...
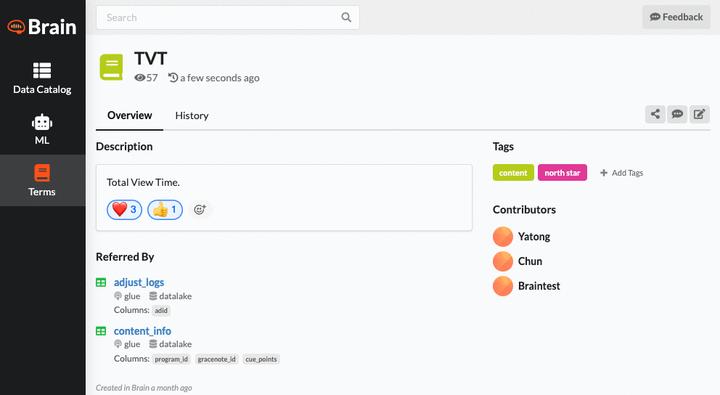
Tubi 故事|中国团队本地管理队伍的形成
当一支团队在公司核心业务中发挥着越来越重要的作用,他们将会获得更多资源以支持团队的发展并在核心业务中持续贡献。相应地,公司也需要投入更多的精力去管理这支规模日渐壮大的团队,尤其当这支远程团队与公司总部在地理和文化上有明显差异时…...
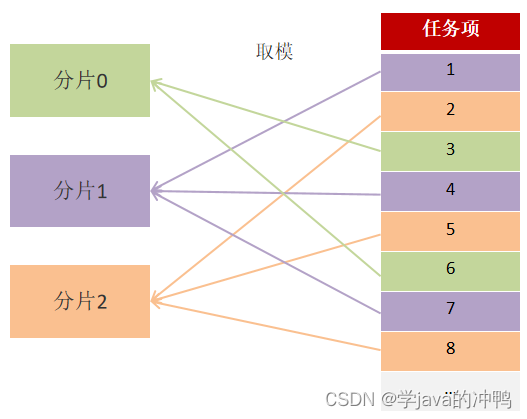
微服务篇之任务调度
一、xxl-job的作用 1. 解决集群任务的重复执行问题。 2. cron表达式定义灵活。 3. 定时任务失败了,重试和统计。 4. 任务量大,分片执行。 二、xxl-job路由策略 1. FIRST(第一个):固定选择第一个机器。 2. LAST&#x…...
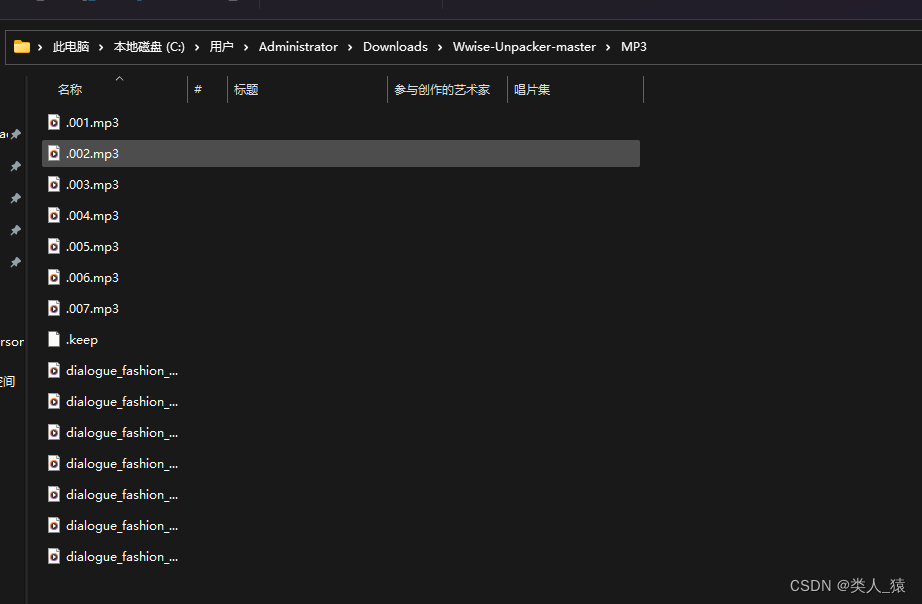
提取游戏音频文件.bnk
提取游戏音频文件.bnk 什么是.bnk准备Wwise-Unpacker工具使用Wwise-Unpacker工具总结 什么是.bnk .bnk其实是一种对音频的加密方式,一个.bnk文件中通常包含了多个语音文件,一般可以使用Wwise-Unpacker来解码.bnk格式文件 准备Wwise-Unpacker工具 Wwis…...

React 模态框的设计(三)拖动组件的完善
我在上次的Draggable组件的设计中给了一个简化的方法,今天我来完善一下这个组件,可用于任何可移动组件的包裹。完善后的效果如下所示: 这个优化中,增加了一个注目的效果,还增加了触发可拖动区域的指定功能,…...

Python爬虫实战:研究MechanicalSoup库相关技术
一、MechanicalSoup 库概述 1.1 库简介 MechanicalSoup 是一个 Python 库,专为自动化交互网站而设计。它结合了 requests 的 HTTP 请求能力和 BeautifulSoup 的 HTML 解析能力,提供了直观的 API,让我们可以像人类用户一样浏览网页、填写表单和提交请求。 1.2 主要功能特点…...
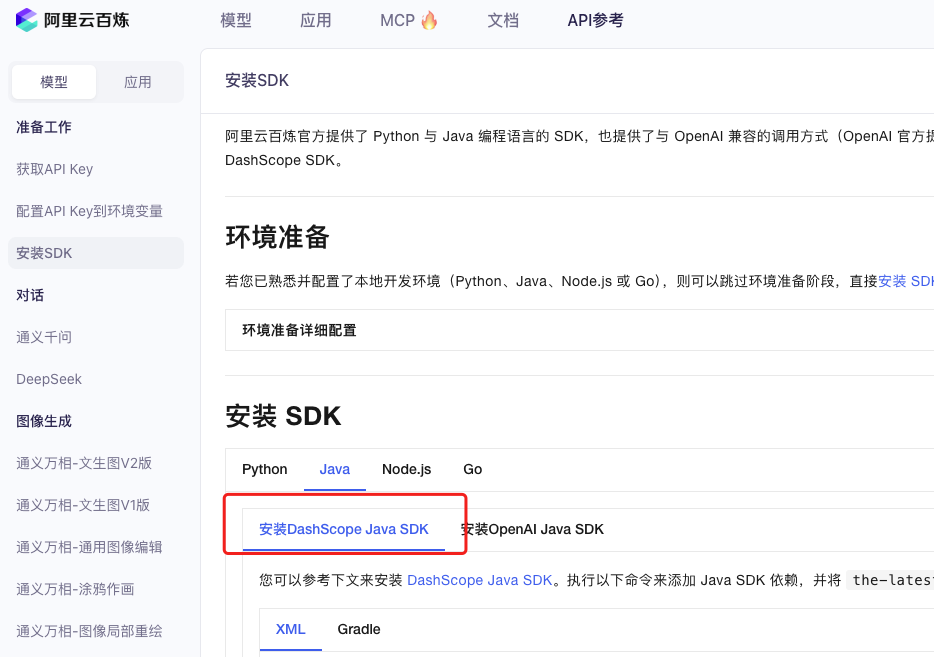
业务系统对接大模型的基础方案:架构设计与关键步骤
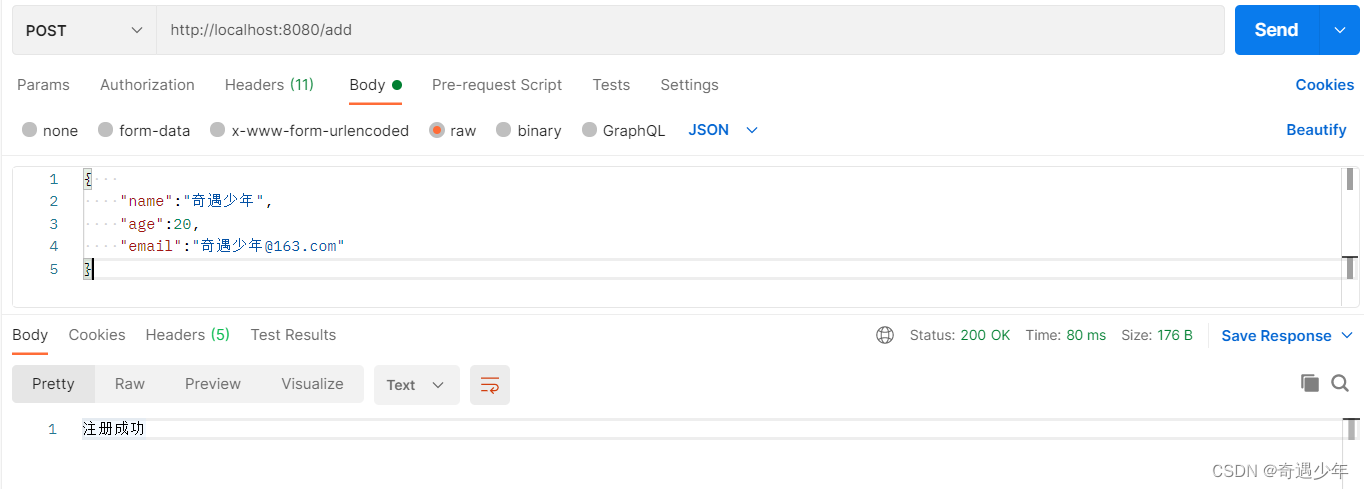
业务系统对接大模型:架构设计与关键步骤 在当今数字化转型的浪潮中,大语言模型(LLM)已成为企业提升业务效率和创新能力的关键技术之一。将大模型集成到业务系统中,不仅可以优化用户体验,还能为业务决策提供…...
)
论文解读:交大港大上海AI Lab开源论文 | 宇树机器人多姿态起立控制强化学习框架(二)
HoST框架核心实现方法详解 - 论文深度解读(第二部分) 《Learning Humanoid Standing-up Control across Diverse Postures》 系列文章: 论文深度解读 + 算法与代码分析(二) 作者机构: 上海AI Lab, 上海交通大学, 香港大学, 浙江大学, 香港中文大学 论文主题: 人形机器人…...

Java如何权衡是使用无序的数组还是有序的数组
在 Java 中,选择有序数组还是无序数组取决于具体场景的性能需求与操作特点。以下是关键权衡因素及决策指南: ⚖️ 核心权衡维度 维度有序数组无序数组查询性能二分查找 O(log n) ✅线性扫描 O(n) ❌插入/删除需移位维护顺序 O(n) ❌直接操作尾部 O(1) ✅内存开销与无序数组相…...

PPT|230页| 制造集团企业供应链端到端的数字化解决方案:从需求到结算的全链路业务闭环构建
制造业采购供应链管理是企业运营的核心环节,供应链协同管理在供应链上下游企业之间建立紧密的合作关系,通过信息共享、资源整合、业务协同等方式,实现供应链的全面管理和优化,提高供应链的效率和透明度,降低供应链的成…...
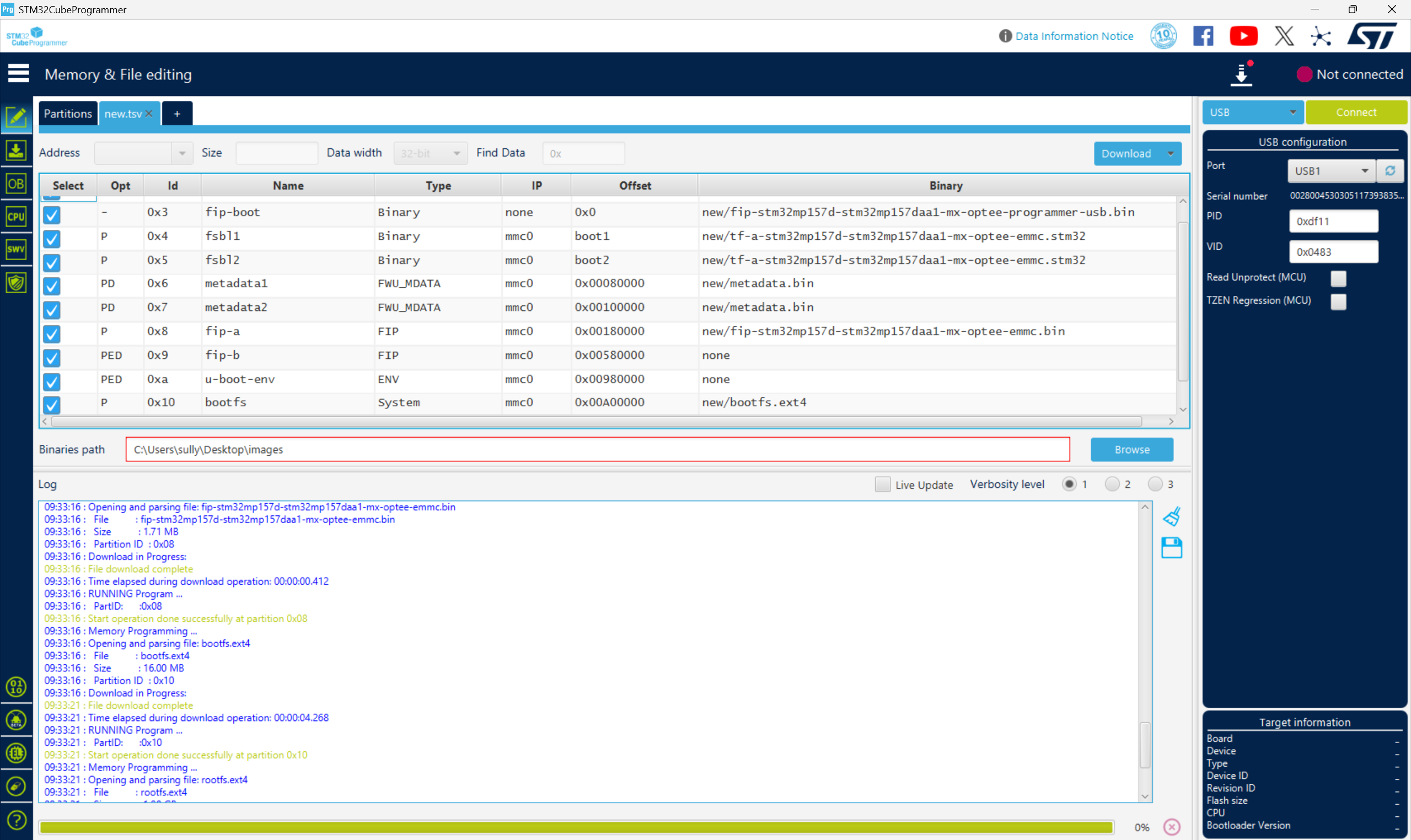
从零开始打造 OpenSTLinux 6.6 Yocto 系统(基于STM32CubeMX)(九)
设备树移植 和uboot设备树修改的内容同步到kernel将设备树stm32mp157d-stm32mp157daa1-mx.dts复制到内核源码目录下 源码修改及编译 修改arch/arm/boot/dts/st/Makefile,新增设备树编译 stm32mp157f-ev1-m4-examples.dtb \stm32mp157d-stm32mp157daa1-mx.dtb修改…...

汇编常见指令
汇编常见指令 一、数据传送指令 指令功能示例说明MOV数据传送MOV EAX, 10将立即数 10 送入 EAXMOV [EBX], EAX将 EAX 值存入 EBX 指向的内存LEA加载有效地址LEA EAX, [EBX4]将 EBX4 的地址存入 EAX(不访问内存)XCHG交换数据XCHG EAX, EBX交换 EAX 和 EB…...

成都鼎讯硬核科技!雷达目标与干扰模拟器,以卓越性能制胜电磁频谱战
在现代战争中,电磁频谱已成为继陆、海、空、天之后的 “第五维战场”,雷达作为电磁频谱领域的关键装备,其干扰与抗干扰能力的较量,直接影响着战争的胜负走向。由成都鼎讯科技匠心打造的雷达目标与干扰模拟器,凭借数字射…...
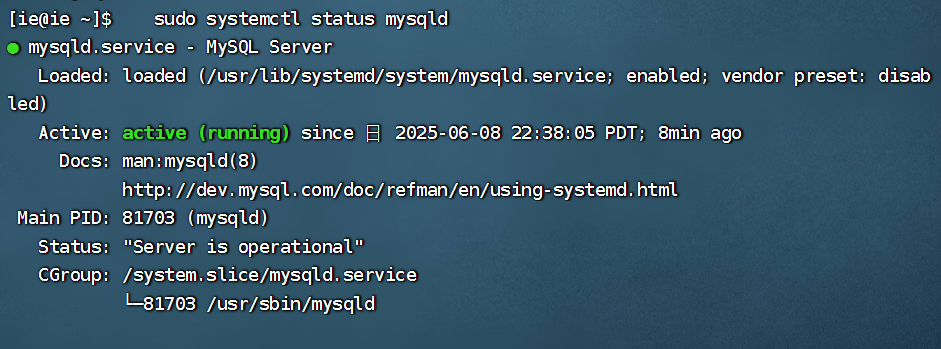
项目部署到Linux上时遇到的错误(Redis,MySQL,无法正确连接,地址占用问题)
Redis无法正确连接 在运行jar包时出现了这样的错误 查询得知问题核心在于Redis连接失败,具体原因是客户端发送了密码认证请求,但Redis服务器未设置密码 1.为Redis设置密码(匹配客户端配置) 步骤: 1).修…...

Mac下Android Studio扫描根目录卡死问题记录
环境信息 操作系统: macOS 15.5 (Apple M2芯片)Android Studio版本: Meerkat Feature Drop | 2024.3.2 Patch 1 (Build #AI-243.26053.27.2432.13536105, 2025年5月22日构建) 问题现象 在项目开发过程中,提示一个依赖外部头文件的cpp源文件需要同步,点…...