pythonJax小记(五):python: 使用Jax深度图像(正交投影和透视投影之间的转换)(持续更新,评论区可以补充)
python: 使用Jax深度图像(正交投影和透视投影之间的转换)
- 前言
- 问题描述
- 1. 透视投影
- 2. 正交投影
- 直接上代码
- 解释
- 1. `compute_projection_parameters` 函数
- a. 参数解释
- b. 函数计算
- 2. `ortho_to_persp` 函数
- a. 计算投影参数:
- b. 生成像素坐标网格:
- c. 计算透视深度值:
- 3. `persp_to_ortho` 函数
- a. 计算投影参数:
- b. 生成像素坐标网格:
- c. 计算正交深度值:
前言
自用,刚开始接触可能顺序会比较乱。
问题描述
目前我知道的(欢迎评论区补充)照相机生成的深度图像有两种方法(如下图):

在透视投影中,物体的大小和形状会根据其距离观察者的远近而发生变化,这是因为透视投影模拟了人眼或相机镜头观察世界的方式,远处的物体看起来更小,近处的物体看起来更大。而在正交投影中,物体的大小和形状与其距离无关,提供了一种更抽象但尺寸精确的视图。
现在假设照相机正在观察一个又大平面又平整的物体:
1. 透视投影
在透视投影中,物体的大小会随着距离相机的远近而变化,即距离相机越远,物体在图像上看起来越小。这种投影方式能够模拟人眼观察世界的方式,因此在大多数三维图形应用中,透视投影是用来创建更加真实感的视觉效果。

虚线部分是照相机到照射物体的距离,从左到右依次叫做depth1p,depth2p,depth3p,depth4p,depth5p;它们之间的关系应该是:
depth1p=depth5p>depth2p=depth4p>depth3p
2. 正交投影
在正交投影中,所有的投影线都是平行的。这意味着无论物体距离相机有多远,它的大小在投影图上都保持不变。正交投影常用于工程图纸和某些类型的艺术作品,因为它不会因为透视而扭曲物体的比例。
虚线部分是照相机到照射物体的距离,从左到右依次叫做depth1o,depth2o,depth3o,depth4o,depth5o;它们之间的关系应该是:
depth1o=depth2o=depth3o=depth4o=depth5o=depth3p(透视投影中最中心点的距离)
我想做的是depth1p <——>depth1o,depth2p <——>depth2o,depth3p <——>depth3o(数值相等不变),depth4p <——>depth4o,depth5p <——>depth5o之间的互相转化。
直接上代码
from jax import random
import jax.numpy as jnp
from jax import jitdef compute_projection_parameters(fov, resolution):"""计算透视投影所需的参数"""h, w = resolutionf = 0.5 * w / jnp.tan(fov * 0.5) # 假设fov是水平的# f = 0.5 * h / jnp.tan(fov * 0.5) # 假设fov是竖直的cx, cy = w * 0.5, h * 0.5return f, cx, cy@jit
def ortho_to_persp(depth_ortho, fov, resolution):"""正交投影深度图转换为透视投影深度图"""f, cx, cy = compute_projection_parameters(fov, resolution)y, x = jnp.indices(depth_ortho.shape)z = depth_orthox_persp = (x - cx) * z / fy_persp = (y - cy) * z / fdepth_persp = jnp.sqrt(x_persp**2 + y_persp**2 + z**2)return depth_persp@jit
def persp_to_ortho(depth_persp, fov, resolution): """透视投影深度图转换为正交投影深度图""" f, cx, cy = compute_projection_parameters(fov, resolution) y, x = jnp.indices(depth_persp.shape) # 逆向透视效果调整深度值 z = depth_persp # 假设所有点在深度图中直接面向相机,计算透视图中的实际深度 depth_ortho = z / jnp.sqrt(((x - cx) / f)**2 + ((y - cy) / f)**2 + 1) return depth_ortho# 创建随机键
key = random.PRNGKey(0)# 示例参数
fov = jnp.radians(58.0) # 58度的视场
resolution = (555, 555) # 深度图的分辨率# 使用JAX的随机数生成函数来创建假设的深度图
depth_ortho = random.uniform(key, resolution)
depth_persp = random.uniform(key, resolution)# 执行转换
depth_persp_converted = ortho_to_persp(depth_ortho, fov, resolution)
depth_ortho_converted = persp_to_ortho(depth_persp, fov, resolution)print("depth_ortho[277][277]:")
print(depth_ortho[277][277])
print("depth_ortho:")
print(depth_ortho)
print("depth_persp_converted[277][277]:")
print(depth_persp_converted[277][277])
print("depth_persp_converted:")
print(depth_persp_converted)print("depth_persp[277][277]:")
print(depth_persp[277][277])
print("depth_persp:")
print(depth_persp)
print("depth_ortho_converted[277][277]:")
print(depth_ortho_converted[277][277])
print("depth_ortho_converted:")
print(depth_ortho_converted)
输出:
depth_ortho[277][277]:
0.17295325
depth_ortho:
[[0.63084936 0.12969959 0.13633609 ... 0.5946181 0.59479845 0.4128834 ]
[0.29537833 0.3383578 0.5370909 ... 0.53237784 0.90082276 0.5761422 ]
[0.32716596 0.12419498 0.6801119 ... 0.55152595 0.48904026 0.8486302 ]
...
[0.30268252 0.2692206 0.73559785 ... 0.210132 0.06937218 0.61453307]
[0.30586207 0.18751395 0.5052029 ... 0.364128 0.3952657 0.09071398]
[0.64812434 0.6937938 0.5302503 ... 0.21545482 0.274127 0.7742363 ]]
depth_persp_converted[277][277]:
0.17295341
depth_persp_converted:
[[0.8015802 0.16468817 0.17299668 ... 0.7539958 0.75473905 0.5242654 ]
[0.37506145 0.4293407 0.68104595 ... 0.6746088 1.142268 0.73106426]
[0.41514048 0.15748264 0.8618096 ... 0.6983931 0.61969155 1.0760863 ]
...
[0.38381162 0.34114605 0.93148196 ... 0.26590642 0.08784546 0.7787128 ]
[0.388108 0.23777282 0.6401722 ... 0.46109253 0.5008643 0.11502781]
[0.82296646 0.88035184 0.6723719 ... 0.2730161 0.34760055 0.98242503]]
depth_persp[277][277]:
0.17295325
depth_persp:
[[0.63084936 0.12969959 0.13633609 ... 0.5946181 0.59479845 0.4128834 ]
[0.29537833 0.3383578 0.5370909 ... 0.53237784 0.90082276 0.5761422 ]
[0.32716596 0.12419498 0.6801119 ... 0.55152595 0.48904026 0.8486302 ]
...
[0.30268252 0.2692206 0.73559785 ... 0.210132 0.06937218 0.61453307]
[0.30586207 0.18751395 0.5052029 ... 0.364128 0.3952657 0.09071398]
[0.64812434 0.6937938 0.5302503 ... 0.21545482 0.274127 0.7742363 ]]
depth_ortho_converted[277][277]:
0.17295307
depth_ortho_converted:
[[0.49648297 0.10214445 0.10744441 ... 0.46892923 0.4687517 0.32516485]
[0.23262416 0.26665536 0.4235641 ... 0.42013407 0.7104127 0.45405012]
[0.25783455 0.09794345 0.53672194 ... 0.4355439 0.3859345 0.6692523 ]
...
[0.23870227 0.21245952 0.58090675 ... 0.1660564 0.05478369 0.4849681 ]
[0.24104528 0.14787847 0.39868954 ... 0.2875544 0.31193072 0.07153945]
[0.510428 0.5467698 0.41816944 ... 0.17002945 0.21618383 0.6101655 ]]
解释
1. compute_projection_parameters 函数
compute_projection_parameters函数的目的是根据给定的视场角(Field of View, FOV)和图像分辨率来计算透视投影所需的参数。这些参数主要是焦距(f)和图像的中心点坐标(cx,cy)。这些参数对于将三维空间中的点投影到二维图像平面上,以及进行透视投影与正交投影之间的转换非常重要。
a. 参数解释
-
fov:视场角,表示相机视角的宽度。在三维图形和计算机视觉中,FOV是一个关键参数,因为它定义了可见场景的范围。视场角越大,相机能够看到的场景就越宽广。
-
resolution:图像分辨率,通常以像素为单位表示图像的宽度和高度。在这个上下文中,分辨率告诉我们图像平面的尺寸,这对于计算图像中点的位置非常重要。
b. 函数计算
焦距(f) 的计算基于视场角(FOV)和图像宽度。焦距是一个表示相机与图像平面之间距离的参数,它影响着场景在图像平面上的投影方式。在这个函数中,焦距是通过下面的公式计算的:
f = 0.5 × w i d t h / t a n ( F O V / 2 ) f = 0.5 × width / tan(FOV/2) f=0.5×width/tan(FOV/2)
这个公式利用了简单的三角形几何关系,其中假设图像平面的宽度直接对应于视场角的跨度。通过这个公式,我们可以根据视场角和图像宽度计算出焦距。
图像中心点坐标(cx,cy) 的计算很直接:它们是图像宽度和高度的一半。图像中心点是图像平面上的一个关键参考点,因为它通常被用作投影和反投影过程中的原点。
2. ortho_to_persp 函数
ortho_to_persp函数的目的是将正交投影的深度图转换为透视投影的深度图。这个转换过程需要根据视场角(FOV)、图像分辨率以及焦距(f)和图像中心(cx, cy)这些计算出的投影参数来完成。
a. 计算投影参数:
首先,利用compute_projection_parameters函数根据FOV和图像分辨率计算出焦距(f)和图像中心(cx, cy)。
b. 生成像素坐标网格:
使用jnp.indices生成一个与输入深度图相同尺寸的像素坐标网格。这个网格包含了每个像素点的行(y)和列(x)坐标。
c. 计算透视深度值:
- 通过(x - cx)和(y - cy)计算每个像素点相对于图像中心的偏移。
- 使用偏移值和深度值(z)以及焦距(f)来调整每个像素的深度值。这里,深度值(z)乘以偏移量除以焦距,计算出在透视视图下像素的“新”位置。
- 最后,利用
jnp.sqrt(x_persp**2 + y_persp**2 + z**2)计算每个像素点在透视投影中的实际深度值。这个步骤通过考虑像素在透视投影中的三维空间位置(考虑深度z)来调整深度图,使得远处的物体看起来更小,近处的物体看起来更大。
3. persp_to_ortho 函数
persp_to_ortho函数的目的是将透视投影的深度图转换为正交投影的深度图。这个过程需要逆转透视投影中深度与像素位置关系的影响,恢复到一个正交视图中,其中物体的大小不会因为它们距离相机的远近而改变。
a. 计算投影参数:
首先,利用compute_projection_parameters函数根据FOV和图像分辨率计算出焦距(f)和图像中心(cx, cy)。
b. 生成像素坐标网格:
使用jnp.indices生成一个与输入深度图相同尺寸的像素坐标网格。这个网格包含了每个像素点的行(y)和列(x)坐标。
c. 计算正交深度值:
在公式depth_ortho = z / jnp.sqrt(((x - cx) / f)**2 + ((y - cy) / f)**2 + 1)中:
(x - cx)和(y - cy)计算的是像素点相对于图像中心的位置差异。/ f是根据焦距来缩放这些差异,使其与实际的视角对应起来。((x - cx) / f)**2 + ((y - cy) / f)**2计算的是像素点从图像中心到该点的距离的平方,这个距离是在图像平面上的。- +1实际上是在计算直角三角形的斜边长度时必须添加的项。想象一个直角三角形,其中
(x - cx) / f和(y - cy) / f代表两个直角边上的长度,而我们想要找的是斜边的长度,即从相机到像素点的实际距离。在这种情况下,+1代表了这个直角三角形斜边计算中的垂直边(即相机到图像平面的距离),它是一个常数,因为在透视投影中,所有的像素点都是从相同的焦点投影到图像平面上的。+1在这里同时确保了对于所有像素,即使在图像中心(x=cx,y=cy)也能正确处理深度值。 - 最后用已知的深度
z比上这个比例得到正交投影下的深度值。
相关文章:
pythonJax小记(五):python: 使用Jax深度图像(正交投影和透视投影之间的转换)(持续更新,评论区可以补充)
python: 使用Jax深度图像(正交投影和透视投影之间的转换) 前言问题描述1. 透视投影2. 正交投影 直接上代码解释1. compute_projection_parameters 函数a. 参数解释b. 函数计算 2. ortho_to_persp 函数a. 计算投影参数:b. 生成像素坐标网格&am…...
web安全学习笔记【16】——信息打点(6)
信息打点-语言框架&开发组件&FastJson&Shiro&Log4j&SpringBoot等[1] #知识点: 1、业务资产-应用类型分类 2、Web单域名获取-接口查询 3、Web子域名获取-解析枚举 4、Web架构资产-平台指纹识别 ------------------------------------ 1、开源-C…...
145.二叉树的后序遍历
// 定义一个名为Solution的类,用于解决二叉树的后序遍历问题 class Solution { // 定义一个公共方法,输入是一个二叉树的根节点,返回一个包含后序遍历结果的整数列表 public List<Integer> postorderTraversal(TreeNode root) { /…...

ssh远程连接免密码访问
我们在远程登录的时候,经常需要输入密码,密码往往比较复杂,输入比较耗费时间,这种情况下可以使用ssh免密码登录。 一般的教程是需要生成ssh密钥后,然后把密钥复制到server端完成配置,这里提供一个简单的方…...

Vue-Json-Schema-Form: 如何基于模板定制前端页面
本人从事的是工业物联网, 面对工业设备的通讯难题是各大设备都有各自的通讯协议, 如果想要用一款硬件去和所有设备做通讯的话, 就得面对怎么把自己想要采集的配置下发给自己的采集器的问题, 以前都是采用各种模型去尝试构建配置项, 但是因为配置可能会有深层次嵌套, 而且…...

保存Json对象到数据库
文章目录 背景实现方式1. 直接以 Json 对象保存到数据库2. 以 String 类型保存到数据库 背景 项目过程中可能需要保存 Json 对象到数据库中。 实现方式 有两种实现方式,一种是直接保存 Json 对象到数据库,这种方式在创建实体类以及编写 Mapper XML 脚本…...
《Docker 简易速速上手小册》第3章 Dockerfile 与镜像构建(2024 最新版)
文章目录 3.1 编写 Dockerfile3.1.1 重点基础知识3.1.2 重点案例:创建简单 Python 应用的 Docker 镜像3.1.3 拓展案例 1:Dockerfile 优化3.1.4 拓展案例 2:多阶段构建 3.2 构建流程深入解析3.2.1 重点基础知识3.2.2 重点案例:构建…...
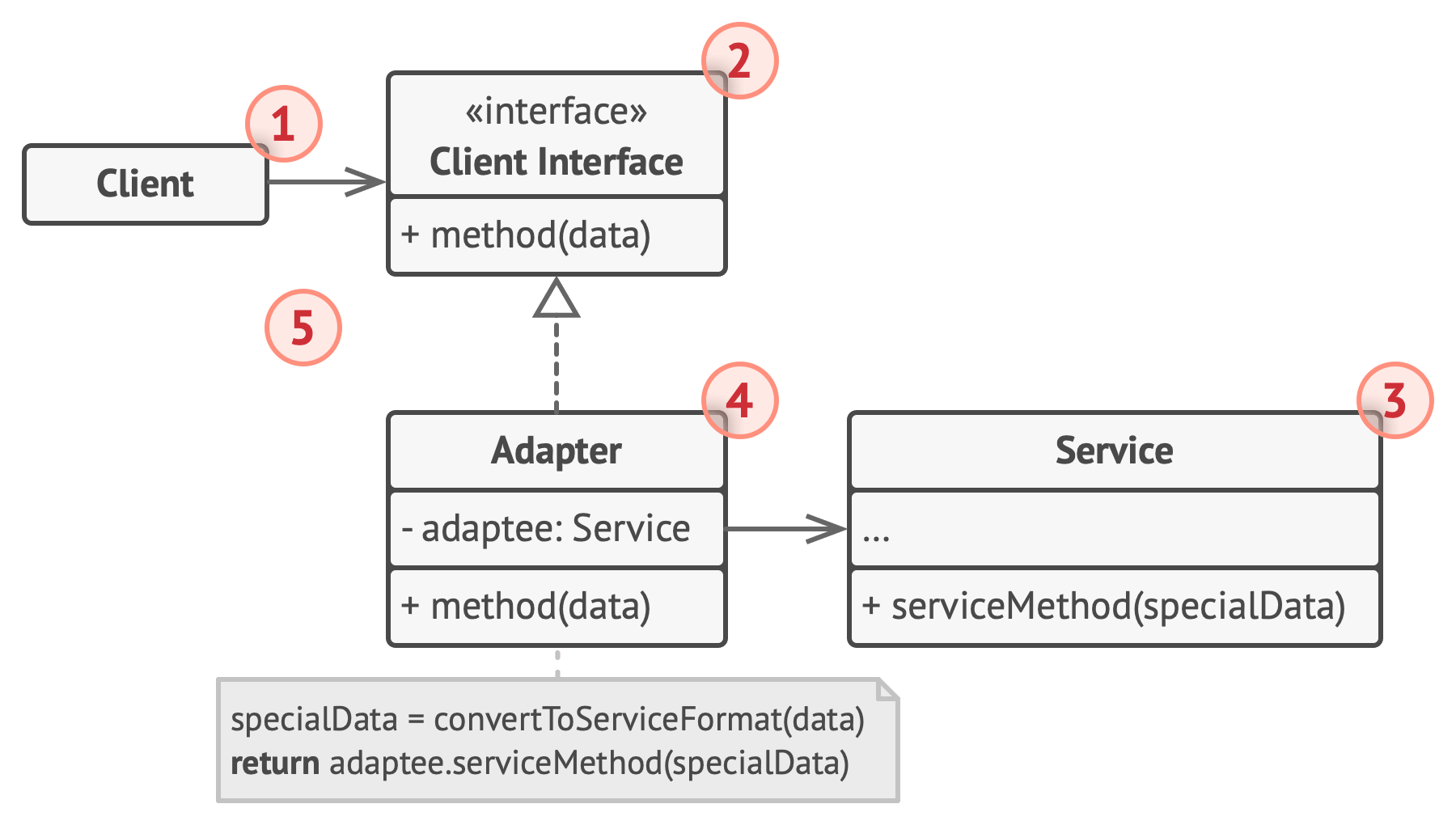
【Python笔记-设计模式】适配器模式
一、说明 适配器模式是一种结构型模式,它使接口不兼容的对象能够相互合作 (一) 解决问题 主要解决接口不兼容问题 (二) 使用场景 当系统需要使用现有的类,但类的接口不符合需求时当需要一个统一的输出接口,但输入类型不可预知时当需要创…...

二分算法(c++版)
二分的本质是什么? 很多人会认为单调性是二分的本质,但其实其本质并非单调性,只是说,有单调性的可以进行二分,但是有些题目没有单调性我们也可以进行二分。其本质其实是一个边界问题,给定一个条件…...
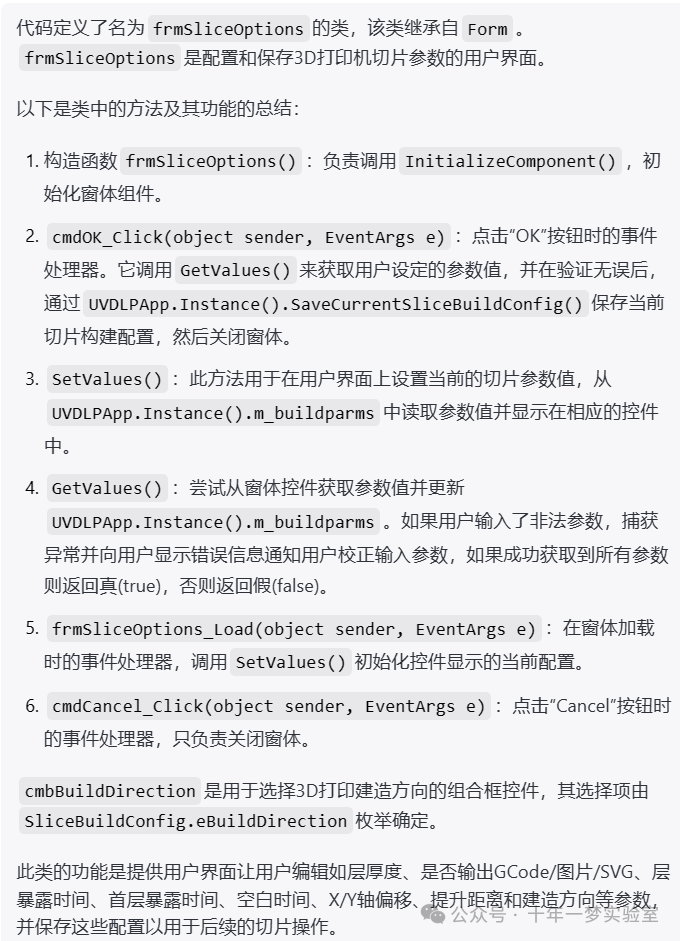
【C#】用于基于 UV DLP 的 3D 打印机的切片软件源码解析(一)DLP原理 GUI
0. 原理 基于 UV DLP 的 3D 打印机的工作原理是这样的: UV DLP 是一种使用数字光处理(Digital Light Processing)技术的 3D 打印方法,它利用紫外光(UV)来固化液态树脂,从而形成实体物体。UV DLP…...

Javase补充-Arrays类的常用方法汇总
文章目录 一 . 排序方法二 . 查找方法三 . 判断是否相等的方法四 . 拷贝方法五 . 填充方法 一 . 排序方法 我们第一个要介绍的就是sort方法 这个排序实现的底层逻辑应该是十分复杂的,以我们目前的水平体系应该无法理解,我们今天尝试用我们可以理解的一种排序算法,插入排序来模…...

微信小程序-人脸检测-眨眼驱动ESP32蓝牙设备灯
前面2篇文章已经写了具体的人脸检测和蓝牙 这里直接结合,只列js 代码,剩下的其他代码在另外文章里面 https://blog.csdn.net/walle167/article/details/136261993 https://blog.csdn.net/walle167/article/details/136261919 上代码 import bleBehavior …...

怎么在wifi中实现手机和电脑文件互传
有时我们想手机电脑文件互传,数据线却不在身边,这时我们可以用MiXplorer来实现wifi中手机和电脑互相访问文件。 MiXplorer是一款来自著名安卓开发者论坛XDA的作品,免费且功能强大,被很多人誉为是“全能文件管理器”。 1.在手机上…...
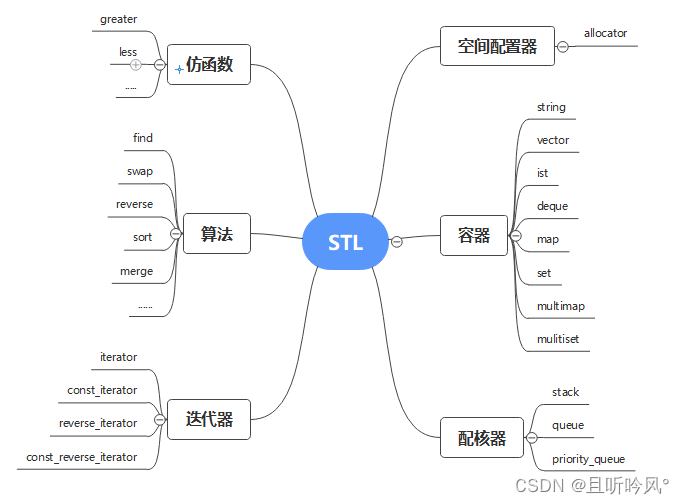
07 STL 简介
目录 什么是STLSTL的版本STL的六大组件STL的重要性如何学习STLSTL的缺陷 1. 什么是STL c标准库的重要组成部分,不仅是一个可复用的组件库,而且是一个包罗数据结构和算法的软件框架 2. STL的版本 原始版本 Alexander Stepanov、Meng Lee在惠普实验室的…...
——创建(create)角色脚本(panel)——静态(static))
unity学习(39)——创建(create)角色脚本(panel)——静态(static)
1.发现一个非常实用的功能,点击unity中console的输出项,可以直接跳转到vs的代码页! 2.static类(变量)有三个特点: (1)独一份(2)无法实例化。(3&…...
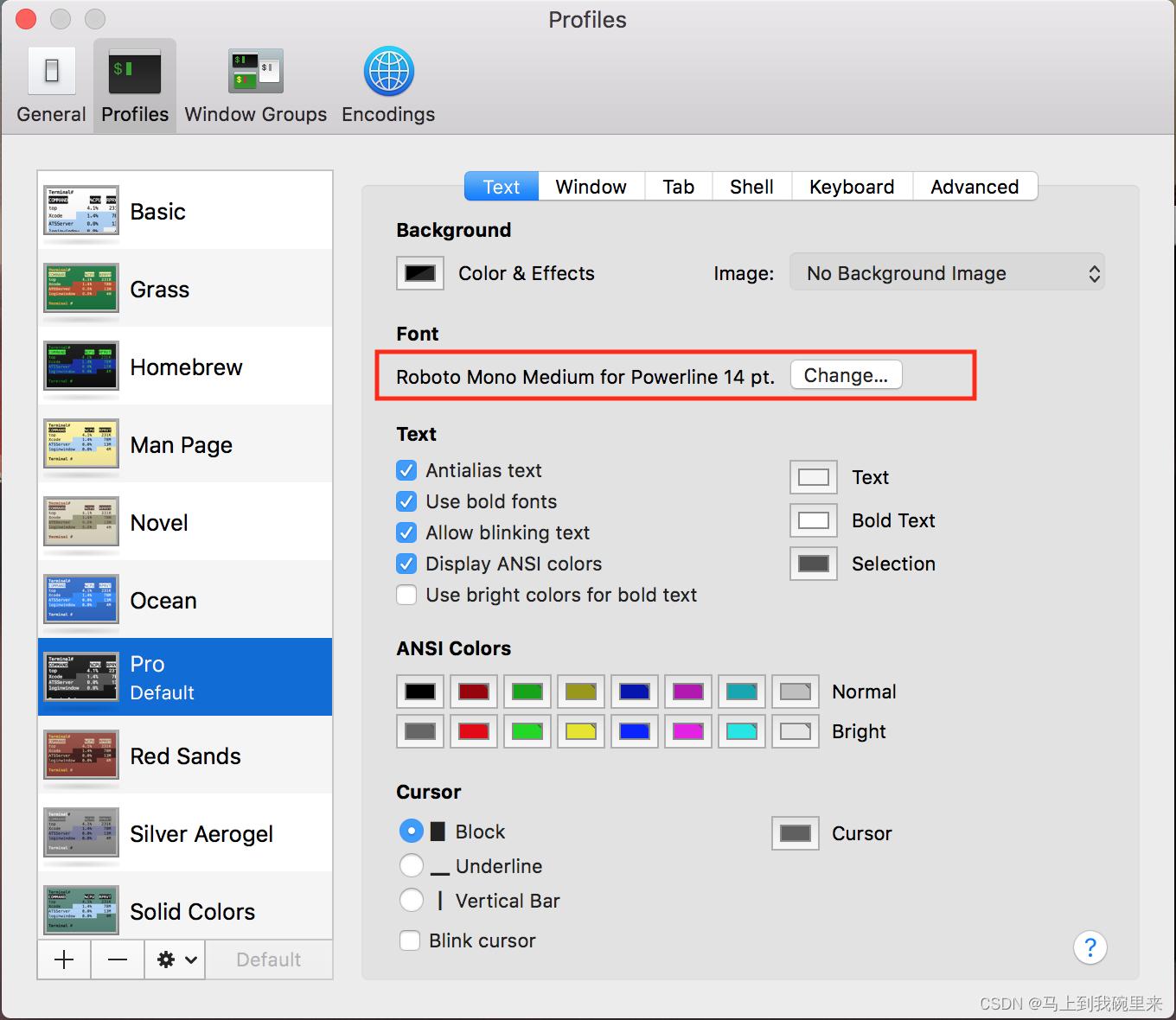
MacOS环境下用powerline配置Terminal终端
Powerline 简介及安装配置 Powerline 是一个 stateless 状态栏,也就是一个全局状态/提示栏。你可以将其配置到你的 bash、Terminal、iTerm2 或 VIM 中,效果会如下所示: 你的 Mac 终端提示栏将会呈现如下图所示: 你的 VIM 状态…...

liunx单机项目部署
文章目录 1.liunx简介2.liunx的jdk安装2.liunx的tomcat安装3.liunx的mysql安装4.单机项目部署 1.liunx简介 Linux,一般指GNU/Linux(单独的Linux内核并不可直接使用,一般搭配GNU套件,故得此称呼),是一种免费…...
SQL 中如何实现多表关联查询?
阅读本文之前请参阅----MySQL 数据库安装教程详解(linux系统和windows系统) 在SQL中,多表关联查询是通过使用JOIN操作来实现的,它允许你从两个或多个表中根据相关列的值来检索数据。以下是几种常见的JOIN类型: …...

oracle 设置权限 禁止删除用户
在Oracle中,可以通过修改系统角色来控制用户的操作权限。要禁止删除用户,需要将DROP USER这个特定的系统权限从相应的角色中移除。 下面是一种常见的方法,使用SQL语句进行操作: -- 创建新的角色,并为其分配所有必要的…...
港科夜闻|香港科大计划建立北部都会区卫星校园完善科大创新带,发展未来创新科技 未来医药发展及跨学科教育...
关注并星标 每周阅读港科夜闻 建立新视野 开启新思维 1、香港科大计划建立北部都会区卫星校园完善“科大创新带”,发展未来创新科技、未来医药发展及跨学科教育。香港科大校长叶玉如教授在2月22日的媒体会议上表示,香港科大将在北部都会区建立卫星校园&a…...

利用ngx_stream_return_module构建简易 TCP/UDP 响应网关
一、模块概述 ngx_stream_return_module 提供了一个极简的指令: return <value>;在收到客户端连接后,立即将 <value> 写回并关闭连接。<value> 支持内嵌文本和内置变量(如 $time_iso8601、$remote_addr 等)&a…...

【Java学习笔记】Arrays类
Arrays 类 1. 导入包:import java.util.Arrays 2. 常用方法一览表 方法描述Arrays.toString()返回数组的字符串形式Arrays.sort()排序(自然排序和定制排序)Arrays.binarySearch()通过二分搜索法进行查找(前提:数组是…...

如何在最短时间内提升打ctf(web)的水平?
刚刚刷完2遍 bugku 的 web 题,前来答题。 每个人对刷题理解是不同,有的人是看了writeup就等于刷了,有的人是收藏了writeup就等于刷了,有的人是跟着writeup做了一遍就等于刷了,还有的人是独立思考做了一遍就等于刷了。…...
Python基于历史模拟方法实现投资组合风险管理的VaR与ES模型项目实战
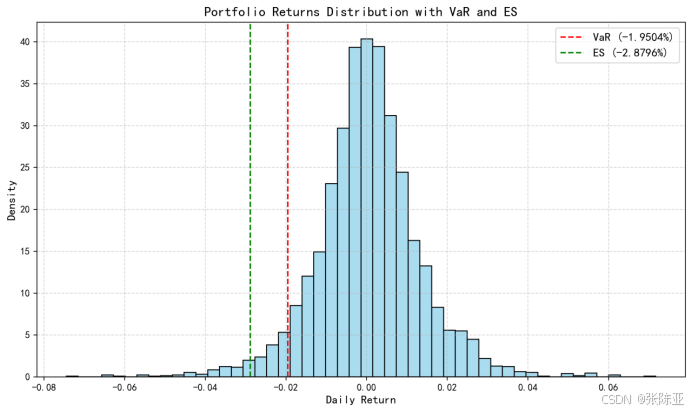
说明:这是一个机器学习实战项目(附带数据代码文档),如需数据代码文档可以直接到文章最后关注获取。 1.项目背景 在金融市场日益复杂和波动加剧的背景下,风险管理成为金融机构和个人投资者关注的核心议题之一。VaR&…...
提供了哪些便利?)
现有的 Redis 分布式锁库(如 Redisson)提供了哪些便利?
现有的 Redis 分布式锁库(如 Redisson)相比于开发者自己基于 Redis 命令(如 SETNX, EXPIRE, DEL)手动实现分布式锁,提供了巨大的便利性和健壮性。主要体现在以下几个方面: 原子性保证 (Atomicity)ÿ…...
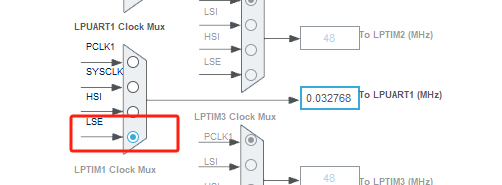
stm32wle5 lpuart DMA数据不接收
配置波特率9600时,需要使用外部低速晶振...
Spring AOP代理对象生成原理
代理对象生成的关键类是【AnnotationAwareAspectJAutoProxyCreator】,这个类继承了【BeanPostProcessor】是一个后置处理器 在bean对象生命周期中初始化时执行【org.springframework.beans.factory.config.BeanPostProcessor#postProcessAfterInitialization】方法时…...
——Oracle for Linux物理DG环境搭建(2))
Oracle实用参考(13)——Oracle for Linux物理DG环境搭建(2)
13.2. Oracle for Linux物理DG环境搭建 Oracle 数据库的DataGuard技术方案,业界也称为DG,其在数据库高可用、容灾及负载分离等方面,都有着非常广泛的应用,对此,前面相关章节已做过较为详尽的讲解,此处不再赘述。 需要说明的是, DG方案又分为物理DG和逻辑DG,两者的搭建…...
:PyQuery 框架)
Python爬虫(四):PyQuery 框架
PyQuery 框架详解与对比 BeautifulSoup 第一部分:PyQuery 框架介绍 1. PyQuery 是什么? PyQuery 是一个 Python 的 HTML/XML 解析库,它采用了 jQuery 的语法风格,让开发者能够用类似前端 jQuery 的方式处理文档解析。它的核心特…...

Neo4j 完全指南:从入门到精通
第1章:Neo4j简介与图数据库基础 1.1 图数据库概述 传统关系型数据库与图数据库的对比图数据库的核心优势图数据库的应用场景 1.2 Neo4j的发展历史 Neo4j的起源与演进Neo4j的版本迭代Neo4j在图数据库领域的地位 1.3 图数据库的基本概念 节点(Node)与关系(Relat…...