YOLOv5代码解读[02] models/yolov5l.yaml文件解析
文章目录
- YOLOv5代码解读[02] models/yolov5l.yaml文件解析
- yolov5l.yaml文件
- 检测头1--->耦合头
- 检测头2--->解耦头
- 检测头3--->ASFF检测头
- Model类解析
- parse_model函数
YOLOv5代码解读[02] models/yolov5l.yaml文件解析
yolov5l.yaml文件
# YOLOv5 🚀 by Ultralytics, GPL-3.0 license# Parameters
nc: 27 # number of classes
depth_multiple: 1.0 # model depth multiple
width_multiple: 1.0 # layer channel multiple
anchors:- [10,13, 16,30, 33,23] # P3/8- [30,61, 62,45, 59,119] # P4/16- [116,90, 156,198, 373,326] # P5/32# YOLOv5 v6.0 backbone
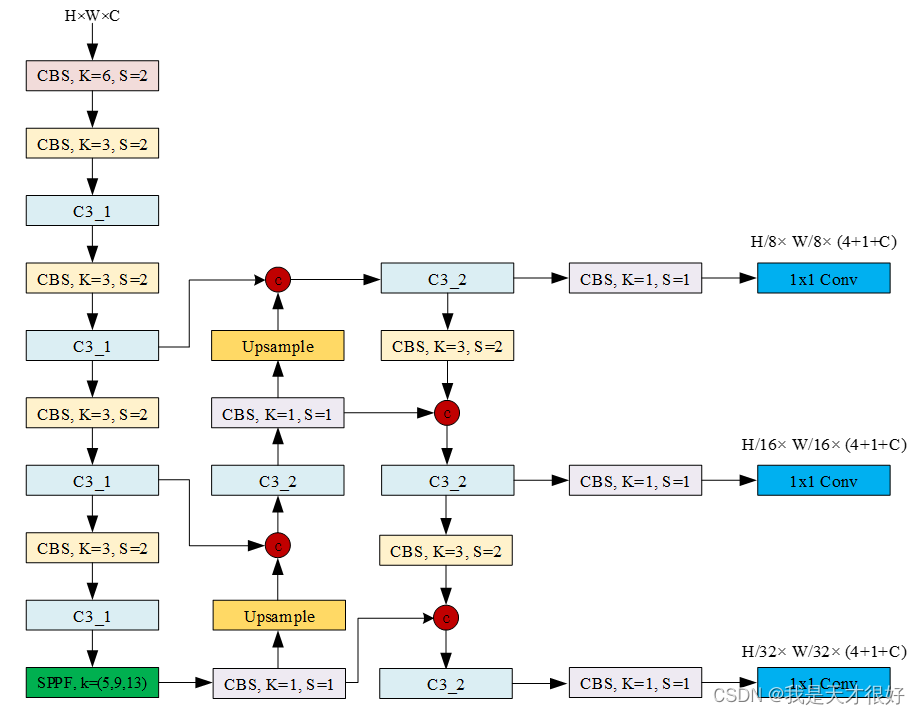
backbone:# [from, number, module, args][[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2[-1, 1, Conv, [128, 3, 2]], # 1-P2/4[-1, 3, C3, [128]],[-1, 1, Conv, [256, 3, 2]], # 3-P3/8[-1, 6, C3, [256]],[-1, 1, Conv, [512, 3, 2]], # 5-P4/16[-1, 9, C3, [512]],[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32[-1, 3, C3, [1024]],[-1, 1, SPPF, [1024, 5]], # 9]# YOLOv5 v6.0 head
head:[[-1, 1, Conv, [512, 1, 1]],[-1, 1, nn.Upsample, [None, 2, 'nearest']],[[-1, 6], 1, Concat, [1]], # cat backbone P4[-1, 3, C3, [512, False]], # 13[-1, 1, Conv, [256, 1, 1]],[-1, 1, nn.Upsample, [None, 2, 'nearest']],[[-1, 4], 1, Concat, [1]], # cat backbone P3[-1, 3, C3, [256, False]], # 17 (P3/8-small)[-1, 1, Conv, [256, 3, 2]],[[-1, 14], 1, Concat, [1]], # cat head P4[-1, 3, C3, [512, False]], # 20 (P4/16-medium)[-1, 1, Conv, [512, 3, 2]],[[-1, 10], 1, Concat, [1]], # cat head P5[-1, 3, C3, [1024, False]], # 23 (P5/32-large)[[17, 20, 23], 1, Detect, [nc, anchors, False]], # Detect(P3, P4, P5)]
检测头1—>耦合头
class Detect(nn.Module):stride = None onnx_dynamic = Falseexport = Falsedef __init__(self, nc=80, anchors=(), Decoupled=False, ch=(), inplace=True): super().__init__()# 是否解耦头self.decoupled = Decoupled# 类别数目self.nc = nc # 每个anchor输出维度 self.no = nc + 5 # 检测层的输出数量(不同尺度个数) self.nl = len(anchors) # 每个尺度特征图的anchor数量self.na = len(anchors[0]) // 2 # 初始化步长init gridself.grid = [torch.zeros(1)] * self.nl # 初始化anchor gridself.anchor_grid = [torch.zeros(1)] * self.nl # self.register_buffer("a", torch.ones(2,3)) # register_buffer的作用是将torch.ones(2,3)这个tensor注册到模型的buffers()属性中,并命名为a,# 这代表a对应的是一个持久态,不会有梯度传播给它,但是能被模型的state_dict记录下来,可以理解为模型的常数。self.register_buffer('anchors', torch.tensor(anchors).float().view(self.nl, -1, 2)) # (3,3,2) == (nl,na,2)# 检测头head输出卷积# 如果是解耦头if self.decoupled:self.m = nn.ModuleList(DecoupledHead(x, self.nc, anchors) for x in ch) # 如果是耦合头else:self.m = nn.ModuleList(nn.Conv2d(x, self.no*self.na, 1) for x in ch) # use in-place ops (e.g. slice assignment)self.inplace = inplace def forward(self, x):# inference outputz = []# 对于每个尺度的特征图来说for i in range(self.nl):# conv# P3: [1, 128, 80, 80]->[1, 3*(nc+5), 80, 80]# P4: [1, 256, 40, 40]->[1, 3*(nc+5), 40, 40]# P5: [1, 512, 20, 20]->[1, 3*(nc+5), 20, 20]x[i] = self.m[i](x[i])# 以coco数据集为例,x(bs,255,20,20) -> x(bs,3,20,20,85) (x,y,w,h,c,c1,c2,.........)bs, _, ny, nx = x[i].shapex[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()# 推断过程inferenceif not self.training:# self.grid: [tensor([0.]), tensor([0.]), tensor([0.])]if self.onnx_dynamic or self.grid[i].shape[2:4] != x[i].shape[2:4]:self.grid[i], self.anchor_grid[i] = self._make_grid(nx, ny, i)y = x[i].sigmoid()if self.inplace:# 中心点xy 网格gridy[..., 0:2] = (y[..., 0:2] * 2 - 0.5 + self.grid[i]) * self.stride[i]# 长宽wh 锚anchor_gridy[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i]else:xy = (y[..., 0:2] * 2 - 0.5 + self.grid[i]) * self.stride[i]wh = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i]y = torch.cat((xy, wh, y[..., 4:]), -1)z.append(y.view(bs, -1, self.no))return x if self.training else (torch.cat(z, 1),) if self.export else (torch.cat(z, 1), x)# # 转成caffe时候的代码# def forward(self, x):# # inference output# z = []# # 对于每个尺度的特征图来说# for i in range(self.nl):# # conv# # P3: [1, 128, 80, 80]->[1, 3*(nc+5), 80, 80]# # P4: [1, 256, 40, 40]->[1, 3*(nc+5), 40, 40]# # P5: [1, 512, 20, 20]->[1, 3*(nc+5), 20, 20]# x[i] = self.m[i](x[i])# # y = x[i]# y = x[i].sigmoid()# z.append(y)# return zdef _make_grid(self, nx=20, ny=20, i=0, torch_1_10=check_version(torch.__version__, '1.10.0')):d = self.anchors[i].devicet = self.anchors[i].dtypey, x = torch.arange(ny, device=d, dtype=t), torch.arange(nx, device=d, dtype=t)# torch>=1.10.0 meshgrid workaround for torch>=0.7 compatibilityif torch_1_10:yv, xv = torch.meshgrid(y, x, indexing='ij')else:yv, xv = torch.meshgrid(y, x)# 网格grid (x, y)# x[i] --> (bs,3,ny,nx,85)# grid --> (1,3,ny,nx,2)grid = torch.stack((xv, yv), 2).expand((1, self.na, ny, nx, 2))# 锚anchor (w, h)# x[i] --> (bs,3,ny,nx,85)# anchor_grid --> (1,3,ny,nx,2)# self.stride: tensor([ 8., 16., 32.])anchor_grid = (self.anchors[i].clone() * self.stride[i]).view((1, self.na, 1, 1, 2)).expand((1, self.na, ny, nx, 2))return grid, anchor_grid
检测头2—>解耦头
class DecoupledHead(nn.Module):def __init__(self, ch=256, nc=80, anchors=()):super().__init__()# 类别个数self.nc = nc# 检测层的数量self.nl = len(anchors)# 每一层anchor个数self.na = len(anchors[0]) // 2self.merge = Conv(ch, 128 , 1, 1) # 默认256self.cls_convs1 = Conv(128, 64, 3, 1, 1)self.cls_convs2 = Conv(64, 64, 3, 1, 1)self.reg_convs1 = Conv(128, 64, 3, 1, 1)self.reg_convs2 = Conv(64, 64, 3, 1, 1)self.cls_preds = nn.Conv2d(64 , self.nc*self.na, 1)self.reg_preds = nn.Conv2d(64 , 4*self.na, 1)self.obj_preds = nn.Conv2d(64 , 1*self.na, 1)def forward(self, x):x = self.merge(x)x1 = self.cls_convs1(x)x1 = self.cls_convs2(x1)x1 = self.cls_preds(x1)x2 = self.reg_convs1(x)x2 = self.reg_convs2(x2)x21 = self.reg_preds(x2)x22 = self.obj_preds(x2)out = torch.cat([x21, x22, x1], 1)return out
检测头3—>ASFF检测头
class ASFF_Detect(nn.Module): stride = None onnx_dynamic = False def __init__(self, nc=80, anchors=(), ch=(), multiplier=0.5, rfb=False, inplace=True): super().__init__()# 类别数目self.nc = nc # 每个anchor输出维度self.no = nc + 5 # 检测层的输出数量(不同尺度个数) self.nl = len(anchors) # 每个尺度特征图的anchor数量self.na = len(anchors[0]) // 2 # 初始化步长init gridself.grid = [torch.zeros(1)] * self.nl # init anchor gridself.anchor_grid = [torch.zeros(1)] * self.nl# self.register_buffer("a", torch.ones(2,3)) # register_buffer的作用是将torch.ones(2,3)这个tensor注册到模型的buffers()属性中,并命名为a,# 这代表a对应的是一个持久态,不会有梯度传播给它,但是能被模型的state_dict记录下来,可以理解为模型的常数。self.register_buffer('anchors', torch.tensor(anchors).float().view(self.nl, -1, 2)) # (3,3,2) == (nl,na,2)# ASFF模块self.l0_fusion = ASFFV5(level=0, multiplier=multiplier, rfb=rfb)self.l1_fusion = ASFFV5(level=1, multiplier=multiplier, rfb=rfb)self.l2_fusion = ASFFV5(level=2, multiplier=multiplier, rfb=rfb)# 检测头head输出卷积self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch) # use in-place ops (e.g. slice assignment)self.inplace = inplace def forward(self, x):# inference outputz = [] result = []result.append(self.l2_fusion(x))result.append(self.l1_fusion(x))result.append(self.l0_fusion(x))x = result # 对于每个尺度的特征图来说for i in range(self.nl):# conv # P3: [1, 128, 80, 80]->[1, 3*(nc+5), 80, 80]# P4: [1, 256, 40, 40]->[1, 3*(nc+5), 40, 40]# P5: [1, 512, 20, 20]->[1, 3*(nc+5), 20, 20]x[i] = self.m[i](x[i]) # 以coco数据集为例,x(bs,255,20,20) -> x(bs,3,20,20,85) (x,y,w,h,c,c1,c2,.........)bs, _, ny, nx = x[i].shape x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()# 推断过程inference if not self.training: # self.grid: [tensor([0.]), tensor([0.]), tensor([0.])]if self.onnx_dynamic or self.grid[i].shape[2:4] != x[i].shape[2:4]:self.grid[i], self.anchor_grid[i] = self._make_grid(nx, ny, i)y = x[i].sigmoid()# 这块xy的计算存在大量疑惑?????????????????????????if self.inplace:# 中心点xy 网格gridy[..., 0:2] = (y[..., 0:2] * 2 - 0.5 + self.grid[i]) * self.stride[i] # 长宽wh 锚anchor_gridy[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] else: # for YOLOv5 on AWS Inferentia https://github.com/ultralytics/yolov5/pull/2953xy = (y[..., 0:2] * 2 - 0.5 + self.grid[i]) * self.stride[i] wh = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] y = torch.cat((xy, wh, y[..., 4:]), -1)z.append(y.view(bs, -1, self.no))return x if self.training else (torch.cat(z, 1), x)def _make_grid(self, nx=20, ny=20, i=0):d = self.anchors[i].deviceif check_version(torch.__version__, '1.10.0'): # torch>=1.10.0 meshgrid workaround for torch>=0.7 compatibilityyv, xv = torch.meshgrid([torch.arange(ny, device=d), torch.arange(nx, device=d)], indexing='ij')else:yv, xv = torch.meshgrid([torch.arange(ny, device=d), torch.arange(nx, device=d)])# 网格grid (x, y)# x[i] --> (bs,3,ny,nx,85)# grid --> (1,3,ny,nx,2)grid = torch.stack((xv, yv), 2).expand((1, self.na, ny, nx, 2)).float()# 锚anchor (w, h)# x[i] --> (bs,3,ny,nx,85)# anchor_grid --> (1,3,ny,nx,2)# self.stride: tensor([ 8., 16., 32.])anchor_grid = (self.anchors[i].clone() * self.stride[i]).view((1, self.na, 1, 1, 2)).expand((1, self.na, ny, nx, 2)).float()return grid, anchor_grid
Model类解析
class Model(nn.Module):def __init__(self, cfg='yolov5s.yaml', ch=3, nc=None, anchors=None): super().__init__()# 字典dict类型if isinstance(cfg, dict):self.yaml = cfg # yaml文件else: self.yaml_file = Path(cfg).name# 用ascii编码,忽略错误的形式打开文件cfgwith open(cfg, encoding='ascii', errors='ignore') as f:self.yaml = yaml.safe_load(f) # 输入通道ch = self.yaml['ch'] = self.yaml.get('ch', ch) # 重写yaml文件中的ncif nc and nc != self.yaml['nc']:LOGGER.info(f"Overriding model.yaml nc={self.yaml['nc']} with nc={nc}")self.yaml['nc'] = nc # 重写yaml文件中的anchors if anchors:LOGGER.info(f'Overriding model.yaml anchors with anchors={anchors}')self.yaml['anchors'] = round(anchors) # 根据yaml文件的model_dict解析模型self.model, self.save = parse_model(deepcopy(self.yaml), ch=[ch]) # 默认类别名字 从0到nc-1self.names = [str(i) for i in range(self.yaml['nc'])] self.inplace = self.yaml.get('inplace', True)# 设置Detect()中的inplace, stride, anchorsm = self.model[-1] if isinstance(m, Detect) or isinstance(m, ASFF_Detect):s = 256m.inplace = self.inplace# 根据前向传播forward 计算步长stridem.stride = torch.tensor([s / x.shape[-2] for x in self.forward(torch.zeros(1, ch, s, s))])# 把anchors放缩到了3个不同的尺度# 这块的形状为什么这样变化??????m.anchors /= m.stride.view(-1, 1, 1)# 根据YOLOv5 Detect()模块m的步幅顺序检查给定锚框顺序,必要时进行纠正。check_anchor_order(m)self.stride = m.strideif m.decoupled:LOGGER.info('decoupled done')pass else:self._initialize_biases() # only run once # 初始化权重weights和偏置biasesinitialize_weights(self)self.info()LOGGER.info('')def forward(self, x, augment=False, profile=False, visualize=False):# 推断时增强augmented inferenceif augment:return self._forward_augment(x) # 单尺度推断single-scale inference 或者训练trainreturn self._forward_once(x, profile, visualize) def _forward_augment(self, x):# height, widthimg_size = x.shape[-2:] s = [1, 0.83, 0.67] # scalesf = [None, 3, None] # flips (2-ud, 3-lr)y = [] # outputsfor si, fi in zip(s, f):xi = scale_img(x.flip(fi) if fi else x, si, gs=int(self.stride.max()))yi = self._forward_once(xi)[0] # forward# cv2.imwrite(f'img_{si}.jpg', 255 * xi[0].cpu().numpy().transpose((1, 2, 0))[:, :, ::-1]) # saveyi = self._descale_pred(yi, fi, si, img_size)y.append(yi)y = self._clip_augmented(y) # clip augmented tailsreturn torch.cat(y, 1), None # augmented inference, traindef _forward_once(self, x, profile=False, visualize=False):y, dt = [], [] for m in self.model:# 输入不是来自于上一个层的输出if m.f != -1: x = y[m.f] if isinstance(m.f, int) else [x if j == -1 else y[j] for j in m.f]if profile:self._profile_one_layer(m, x, dt)# 计算输出x = m(x)y.append(x if m.i in self.save else None) # 特征可视化if visualize:feature_visualization(x, m.type, m.i, save_dir=visualize)return xdef _descale_pred(self, p, flips, scale, img_size):# de-scale predictions following augmented inference (inverse operation)if self.inplace:p[..., :4] /= scale # de-scaleif flips == 2:p[..., 1] = img_size[0] - p[..., 1] # de-flip udelif flips == 3:p[..., 0] = img_size[1] - p[..., 0] # de-flip lrelse:x, y, wh = p[..., 0:1] / scale, p[..., 1:2] / scale, p[..., 2:4] / scale # de-scaleif flips == 2:y = img_size[0] - y # de-flip udelif flips == 3:x = img_size[1] - x # de-flip lrp = torch.cat((x, y, wh, p[..., 4:]), -1)return pdef _clip_augmented(self, y):# Clip YOLOv5 augmented inference tailsnl = self.model[-1].nl # number of detection layers (P3-P5)g = sum(4 ** x for x in range(nl)) # grid pointse = 1 # exclude layer counti = (y[0].shape[1] // g) * sum(4 ** x for x in range(e)) # indicesy[0] = y[0][:, :-i] # largei = (y[-1].shape[1] // g) * sum(4 ** (nl - 1 - x) for x in range(e)) # indicesy[-1] = y[-1][:, i:] # smallreturn ydef _profile_one_layer(self, m, x, dt):c = isinstance(m, Detect) or isinstance(m, ASFF_Detect) # is final layer, copy input as inplace fixo = thop.profile(m, inputs=(x.copy() if c else x,), verbose=False)[0] / 1E9 * 2 if thop else 0 # FLOPst = time_sync()for _ in range(10):m(x.copy() if c else x)dt.append((time_sync() - t) * 100)if m == self.model[0]:LOGGER.info(f"{'time (ms)':>10s} {'GFLOPs':>10s} {'params':>10s} {'module'}")LOGGER.info(f'{dt[-1]:10.2f} {o:10.2f} {m.np:10.0f} {m.type}')if c:LOGGER.info(f"{sum(dt):10.2f} {'-':>10s} {'-':>10s} Total")def _initialize_biases(self, cf=None): # initialize biases into Detect(), cf is class frequency# https://arxiv.org/abs/1708.02002 section 3.3# cf = torch.bincount(torch.tensor(np.concatenate(dataset.labels, 0)[:, 0]).long(), minlength=nc) + 1.m = self.model[-1] # mi--> Conv2d(128, 255, kernel_size=(1, 1), stride=(1, 1)) # s --> tensor(8.)for mi, s in zip(m.m, m.stride): # conv.bias(255) to (3,85)b = mi.bias.view(m.na, -1) b.data[:, 4] += math.log(8 / (640 / s) ** 2) # obj (8 objects per 640 image)b.data[:, 5:] += math.log(0.6 / (m.nc - 0.999999)) if cf is None else torch.log(cf / cf.sum()) # clsmi.bias = torch.nn.Parameter(b.view(-1), requires_grad=True)def _print_biases(self):m = self.model[-1] for mi in m.m: b = mi.bias.detach().view(m.na, -1).T LOGGER.info(('%6g Conv2d.bias:' + '%10.3g' * 6) % (mi.weight.shape[1], *b[:5].mean(1).tolist(), b[5:].mean()))def _print_weights(self):for m in self.model.modules():if type(m) is Bottleneck:LOGGER.info('%10.3g' % (m.w.detach().sigmoid() * 2)) # shortcut weightsdef fuse(self): # fuse model Conv2d() + BatchNorm2d() layersLOGGER.info('Fusing layers... ')for m in self.model.modules():if isinstance(m, (Conv, DWConv)) and hasattr(m, 'bn'):m.conv = fuse_conv_and_bn(m.conv, m.bn) # update convdelattr(m, 'bn') # remove batchnormm.forward = m.forward_fuse # update forwardself.info()return selfdef info(self, verbose=False, img_size=640): # 打印模型信息model_info(self, verbose, img_size)def _apply(self, fn):# Apply to(), cpu(), cuda(), half() to model tensors that are not parameters or registered buffersself = super()._apply(fn)m = self.model[-1] # Detect()if isinstance(m, Detect) or isinstance(m, ASFF_Detect) or isinstance(m, Decoupled_Detect):m.stride = fn(m.stride)m.grid = list(map(fn, m.grid))if isinstance(m.anchor_grid, list):m.anchor_grid = list(map(fn, m.anchor_grid))return self
parse_model函数
def parse_model(d, ch): # model_dict, input_channels(3)LOGGER.info(f"\n{'':>3}{'from':>18}{'n':>3}{'params':>10} {'module':<40}{'arguments':<30}")# nc:类别数; gd:'depth_multiple'; gw:'width_multiple'anchors, nc, gd, gw = d['anchors'], d['nc'], d['depth_multiple'], d['width_multiple']# anchor数目, 每层为3na = (len(anchors[0]) // 2) if isinstance(anchors, list) else anchors # 每层的输出,na*(classes+5)no = na * (nc + 5) # layers, savelist, ch_outlayers, save, c2 = [], [], ch[-1] # from, number, module, args# 以[-1, 1, Conv, [64, 6, 2, 2]为例, ch=[3], f=-1, n=1, m=Conv, args=[64, 6, 2, 2]# [-1, 1, Conv, [128, 3, 2]# [-1, 3, C3, [128]]# [-1, 1, SPPF, [1024, 5]]# [-1, 1, nn.Upsample, [None, 2, 'nearest']]# [[-1, 6], 1, Concat, [1]]# [-1, 3, C3, [512, False]]for i, (f, n, m, args) in enumerate(d['backbone'] + d['head']):# 把strings转为本身的类型m = eval(m) if isinstance(m, str) else m for j, a in enumerate(args):try:# 列表形式args[j] = eval(a) if isinstance(a, str) else a except NameError:pass# depth_gain 深度缩放因子n = n_ = max(round(n*gd), 1) if n > 1 else n # 对于不同类型的卷积模块 if m in [Conv, DWConv, CrossConv, GhostConv, Bottleneck, GhostBottleneck,BottleneckCSP, MobileBottleneck, SPP, SPPF, MixConv2d, Focus,InvertedResidual, ConvBNReLU, C3, C3TR, C3SPP, C3Ghost, CoordAtt,CoordAttv2, OSA_Stage]:# i=0, c1=3, c2=64; # i=1, c1=32, c2=128; # i=2, c1=64, c2=128;# c1输入通道;c2输出通道;c1, c2 = ch[f], args[0]# width_gain 宽度缩放因子# 说明不是输出if c2 != no: # 输出通道数必须为8的倍数c2 = make_divisible(c2*gw, 8)# i=0, [3, 32, 6, 2, 2]# i=1, [32, 64, 3, 2]# i=2, [64, 64]args = [c1, c2, *args[1:]]# 堆叠次数number of repeats# 注意网络设计理念:stage ---> block ---> layerif m in [BottleneckCSP, C3, C3TR, C3Ghost]:args.insert(2, n) n = 1elif m is nn.BatchNorm2d:args = [ch[f]]elif m is Concat:c2 = sum(ch[x] for x in f)elif m is Detect:args.append([ch[x] for x in f])if isinstance(args[1], int): # number of anchorsargs[1] = [list(range(args[1] * 2))] * len(f)elif m is ASFF_Detect :args.append([ch[x] for x in f])if isinstance(args[1], int): # number of anchorsargs[1] = [list(range(args[1] * 2))] * len(f) elif m is Contract:c2 = ch[f] * args[0] ** 2elif m is Expand:c2 = ch[f] // args[0] ** 2elif m is ConvNeXt_Block:c2 = args[0]args = args[1:]else:c2 = ch[f]# module# Conv(3, 32, 6, 2, 2]m_ = nn.Sequential(*(m(*args) for _ in range(n))) if n > 1 else m(*args) # m ===> <class 'models.common.Conv'># str(m)[8:-2] ===> models.common.Convt = str(m)[8:-2].replace('__main__.', '') # 参数(parameters)/模型参数, 由模型通过学习得到的变量,比如权重和偏置.# m_.parameters(): <generator object Module.parameters at 0x7fcf4c2059d0>np = sum(x.numel() for x in m_.parameters()) # attach index, 'from' index, type, number paramsm_.i, m_.f, m_.type, m_.np = i, f, t, np LOGGER.info(f'{i:>3}{str(f):>18}{n_:>3}{np:10.0f} {t:<40}{str(args):<30}') # savelist [6, 4, 14, 10, 17, 20, 23]save.extend(x % i for x in ([f] if isinstance(f, int) else f) if x != -1) # layers列表layers.append(m_)if i == 0:ch = []# ch列表ch.append(c2)return nn.Sequential(*layers), sorted(save)
相关文章:
YOLOv5代码解读[02] models/yolov5l.yaml文件解析
文章目录 YOLOv5代码解读[02] models/yolov5l.yaml文件解析yolov5l.yaml文件检测头1--->耦合头检测头2--->解耦头检测头3--->ASFF检测头Model类解析parse_model函数 YOLOv5代码解读[02] models/yolov5l.yaml文件解析 yolov5l.yaml文件 # YOLOv5 🚀 by Ult…...

智能搬运机器人|海格里斯将如何持续推进工业和物流的智能化升级与发展?
存取、搬运、分拣是物流行业中的通用功能,但具体到每个行业又十分不同,例如:新能源电池领域,它所搬运的东西是电池,50KG~200KG;快递行业领域,所要处理的物料是那种扁平件和信封等等,…...
linux之前后端项目部署与发布
目录 前言 简介 一、安装Nginx 二、后端部署 2.1多个tomcat负载均衡 2.2 负载均衡 2.3 后端项目部署 三、前端部署 1.解压前端 2.Nginx配置文件修改 3.IP域名映射 4.重启Nginx服务 前言 上篇博主已经讲解过了单机项目的部署linux之JAVA环境配置JDK&Tomcat&a…...

Python 高级语法:一切皆对象
1 “一切皆对象”是一种核心设计哲学 在编程领域,特别是面向对象编程(OOP)中,“一切皆对象”是一种核心设计哲学。这种哲学主张,无论是数据、函数、还是更复杂的结构,都可以被视为对象,并赋予…...
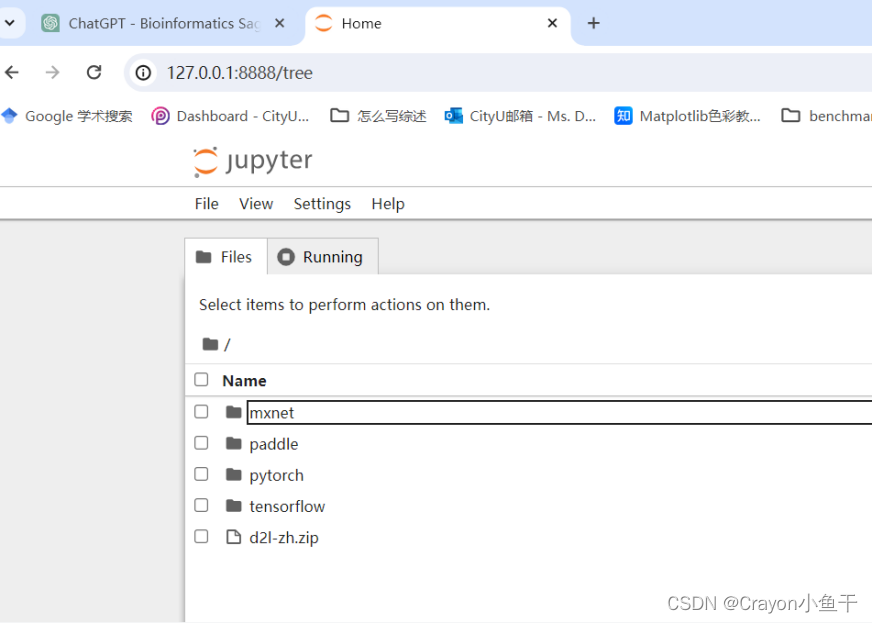
python jupyter notebook打开页面方便使用
如果没安装jupyter, 请安装: pip install jupyter notebook 运行jupyter notebook jupyter-notebook...
音视频开发之旅(69)-SD图生图
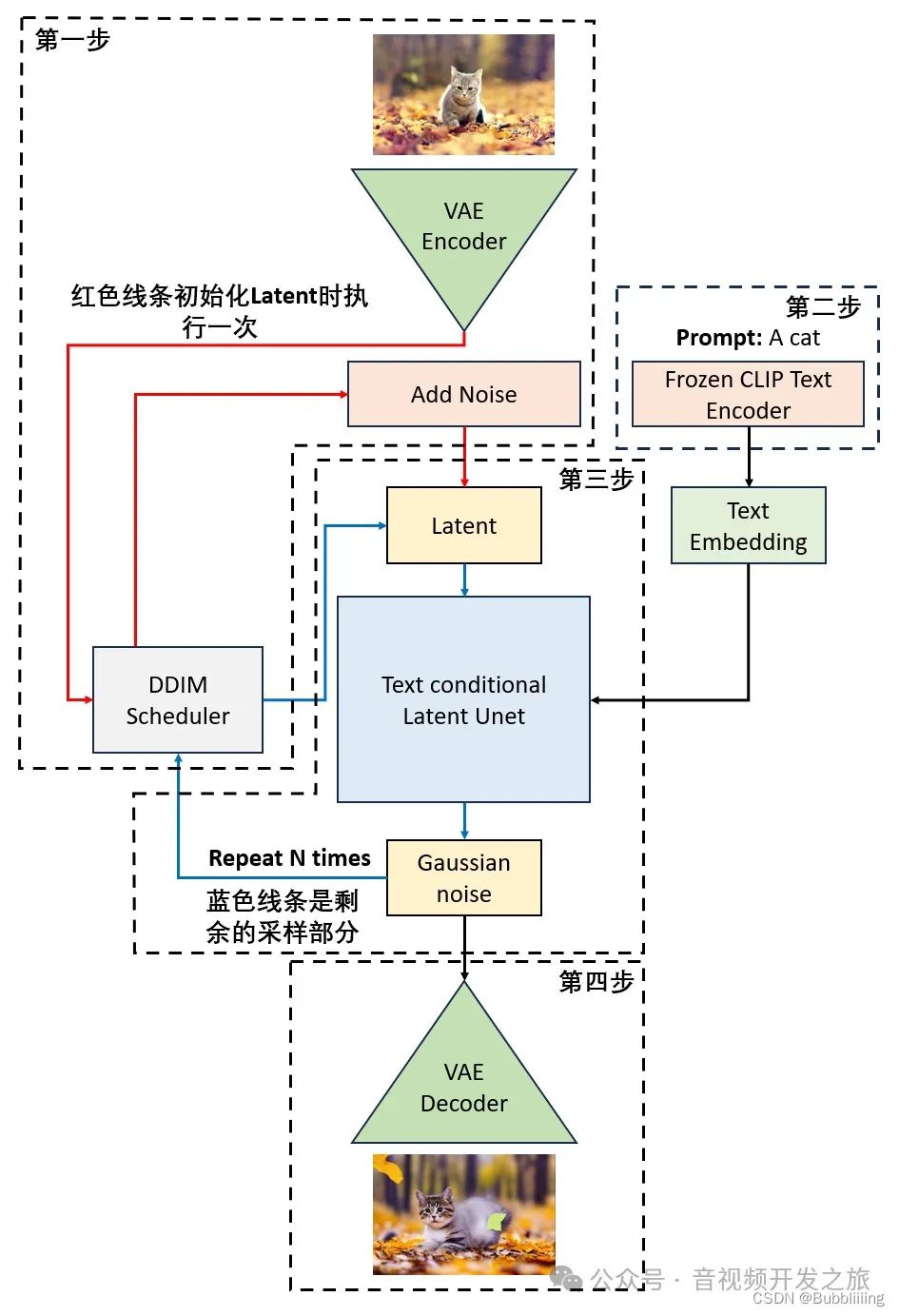
目录 1. 效果展示 2. ControlNet介绍 3. 图生图流程浅析 4. SDWebui图生图代码流程 5. 参考资料 一、效果展示 图生图的应用场景非常多,比较典型的应用场景有风格转化(真人与二次元)、线稿上色、换装和对图片进行扩图等,下面…...
)
數據集成平台:datax將hive數據步到mysql(全部列和指定列)
數據集成平台:datax將hive數據步到mysql(全部列和指定列) 1.py腳本 傳入參數: target_database:數據庫 target_table:表 target_columns:列 target_positions:hive列的下標&#x…...
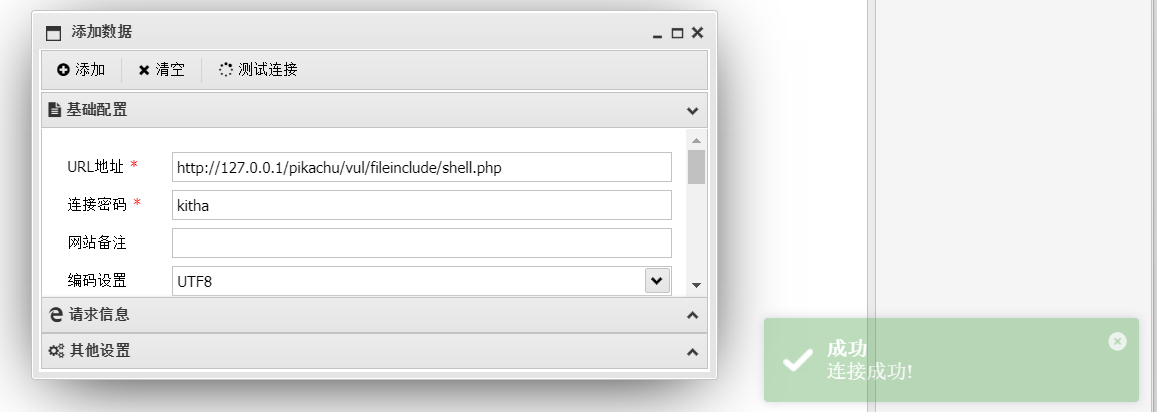
pikachu靶场-File Inclusion
介绍: File Inclusion(文件包含漏洞)概述 文件包含,是一个功能。在各种开发语言中都提供了内置的文件包含函数,其可以使开发人员在一个代码文件中直接包含(引入)另外一个代码文件。 比如 在PHP中,提供了&…...

[今天跟AI聊聊职场] ~你能接受你的直接领导能力不如你,年纪还比你小很多吗?
知乎问题: 弟弟今年35岁,刚换了一份工作,直接领导小A比他小5岁,各方面经验没有他成熟。难的工作都是弟弟在做,功劳都被直接领导小A抢走了,有时候还要被直接领导小A打压。弟弟感觉升职加薪无望。现在找工作不…...
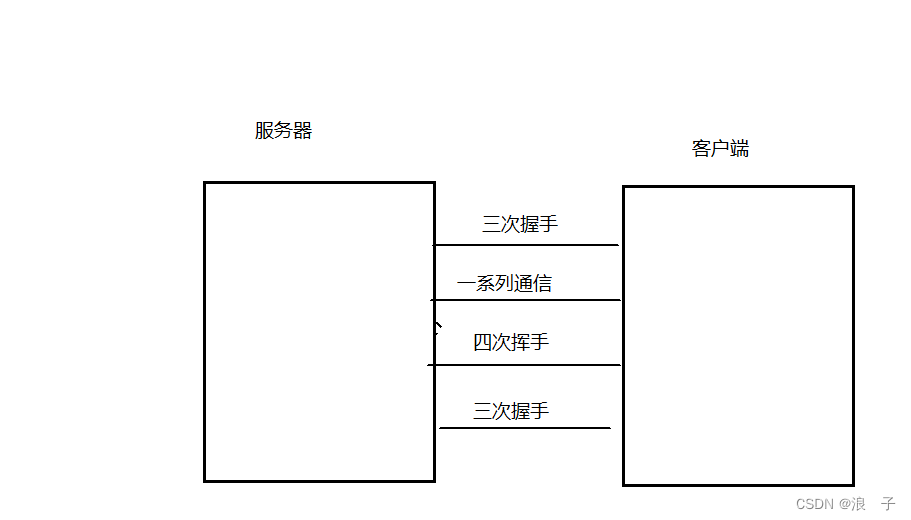
网络原理TCP之“三次握手“
TCP内核中的建立连接 众所周知,TCP是有连接的. 当我们在客户端敲出socket new Socket(serverIp,severPort)时,就在系统内核就在建立连接 真正建立连接是在系统内核中建立的,我们程序员只是调用相关的api. 在此处,我们把TCP的建立连接称为三次握手. 系统在内核建立连接时如上…...
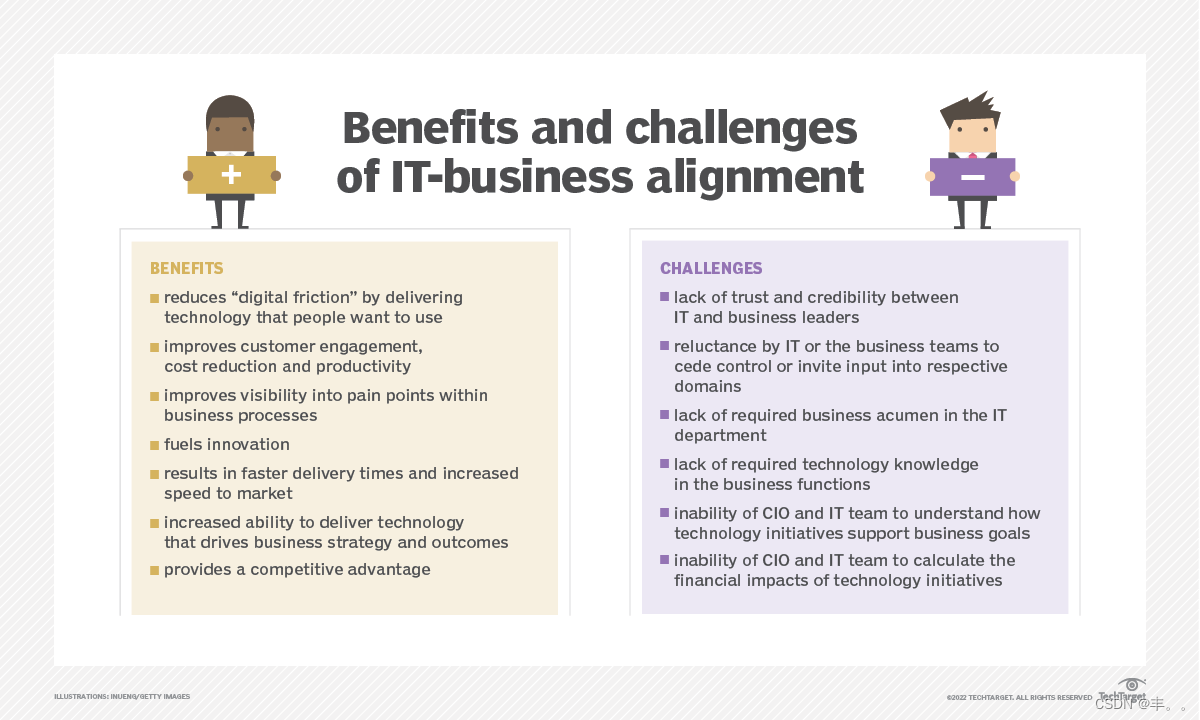
990-03产品经理与程序员:什么是 IT 与业务协调以及为什么它很重要?
What is IT-business alignment and why is it important? 什么是IT-业务一致性?为什么它很重要? It’s more important than ever that IT and the business operate from the same playbook(剧本). So why do so many organizations struggle to ach…...
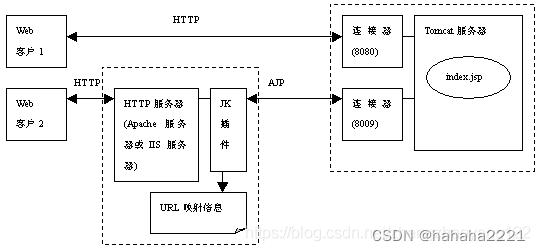
Java Web(七)__Tomcat(二)
Tomcat工作模式 Tomcat作为Servlet容器,有以下三种工作模式。 1)独立的Servlet容器,由Java虚拟机进程来运行 Tomcat作为独立的Web服务器来单独运行,Servlet容器组件作为Web服务器中的一部分而存在。这是Tomcat的默认工作模式。…...

【项目实战】帮美女老师做一个点名小程序(Python tkinter)
前言 博主有一个非常漂亮的老师朋友😍。最近,她急需一个能够实现随机点名的小程序,而博主正好擅长这方面的技术🤏。所以,今天博主决定为她制作一个专门用于点名的小程序💪。 博主在美女老师面前吹完牛皮之…...

Elasticsearch 去重后求和
标题的要求可以用如下 SQL 表示 select sum(column2) from (select distinct(column1),column2 from table)t 要如何用 DSL 实现呢,先准备下索引和数据 PUT test_index {"mappings": {"properties": {"column1": {"type"…...
)
考研数学——高数:函数与极限(3)
函数的连续性与间断点 函数的连续性 左连续 右连续 区间上的连续性 在xo处连续 函数的间断点 第一类间断点(左右极限都存在) 可去间断点: f(xo-0)= f(xo+0) 跳跃间断点: f(xo-0)≠ f(xo+0) 第二类间断点(震荡间断点、无穷间断点)...

LeetCode49 字母异位词分组
LeetCode49 字母异位词分组 在这篇博客中,我们将探讨 LeetCode 上的一道经典算法问题:字母异位词分组。这个问题要求将给定的字符串数组中的字母异位词组合在一起,并以任意顺序返回结果列表。 问题描述 给定一个字符串数组 strs࿰…...
【Python】Windows本地映射远程Linux服务器上的端口(解决jupyter notebook无法启动问题)
创作日志: 学习深度学习不想在本地破电脑上再安装各种软件,我就用实验室的服务器配置环境,启动jupyter notebook时脑子又瓦特了,在自己Windows电脑上打开服务器提供的网址,那肯定打不开啊,以前在其它电脑上…...

C++面试:用户态和内核态的基本概念、区别
目录 一、基本概念 概念: 区别: 二、Windows示例 基础介绍 用户态到内核态的切换过程: 程序实例 三、Linux示例 特权级别: 用户态到内核态的切换过程: 调度和中断处理: 程序实例 总结 在操作系…...
)
Vue计算属性computed()
1. 计算属性定义 获取计算属性值 <div>{{ 计算属性名称}}</div>创建计算属性 let 定义的属性ref/reactive....let 计算属性名称 computed(() > {//这里写函数式,函数式里面包含定义属性//只有这个包含的定义属性被修改时才出发此函数式//通过计算属性名称co…...
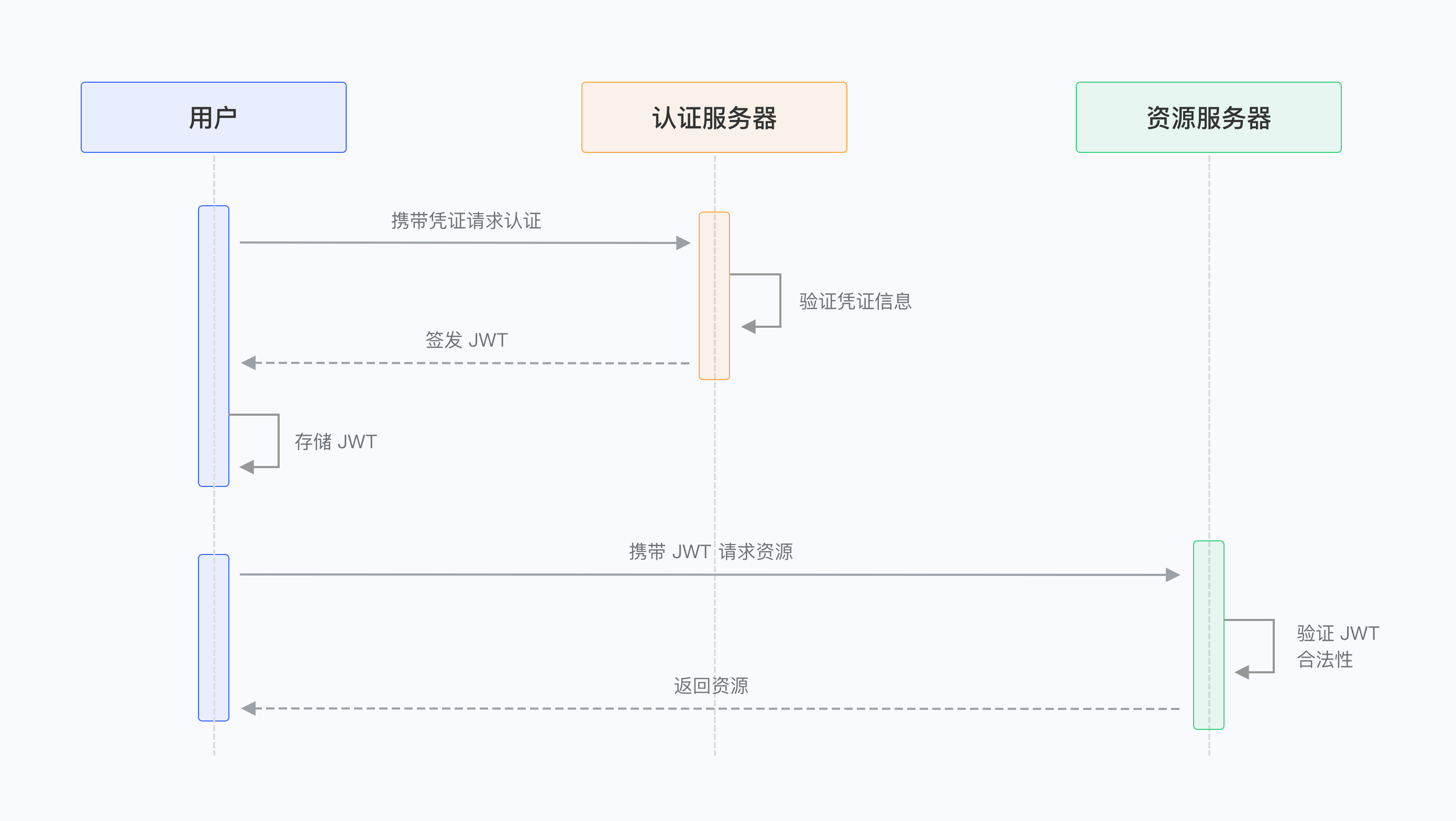
JWT学习笔记
了解 JWT Token 释义及使用 | Authing 文档 JSON Web Token Introduction - jwt.io JSON Web Token (JWT,RFC 7519 (opens new window)),是为了在网络应用环境间传递声明而执行的一种基于 JSON 的开放标准((RFC 7519)。该 token 被设计为紧凑…...
网络六边形受到攻击
大家读完觉得有帮助记得关注和点赞!!! 抽象 现代智能交通系统 (ITS) 的一个关键要求是能够以安全、可靠和匿名的方式从互联车辆和移动设备收集地理参考数据。Nexagon 协议建立在 IETF 定位器/ID 分离协议 (…...
超短脉冲激光自聚焦效应
前言与目录 强激光引起自聚焦效应机理 超短脉冲激光在脆性材料内部加工时引起的自聚焦效应,这是一种非线性光学现象,主要涉及光学克尔效应和材料的非线性光学特性。 自聚焦效应可以产生局部的强光场,对材料产生非线性响应,可能…...

反向工程与模型迁移:打造未来商品详情API的可持续创新体系
在电商行业蓬勃发展的当下,商品详情API作为连接电商平台与开发者、商家及用户的关键纽带,其重要性日益凸显。传统商品详情API主要聚焦于商品基本信息(如名称、价格、库存等)的获取与展示,已难以满足市场对个性化、智能…...

多场景 OkHttpClient 管理器 - Android 网络通信解决方案
下面是一个完整的 Android 实现,展示如何创建和管理多个 OkHttpClient 实例,分别用于长连接、普通 HTTP 请求和文件下载场景。 <?xml version"1.0" encoding"utf-8"?> <LinearLayout xmlns:android"http://schemas…...

Swift 协议扩展精进之路:解决 CoreData 托管实体子类的类型不匹配问题(下)
概述 在 Swift 开发语言中,各位秃头小码农们可以充分利用语法本身所带来的便利去劈荆斩棘。我们还可以恣意利用泛型、协议关联类型和协议扩展来进一步简化和优化我们复杂的代码需求。 不过,在涉及到多个子类派生于基类进行多态模拟的场景下,…...
深入理解JavaScript设计模式之单例模式
目录 什么是单例模式为什么需要单例模式常见应用场景包括 单例模式实现透明单例模式实现不透明单例模式用代理实现单例模式javaScript中的单例模式使用命名空间使用闭包封装私有变量 惰性单例通用的惰性单例 结语 什么是单例模式 单例模式(Singleton Pattern&#…...

基础测试工具使用经验
背景 vtune,perf, nsight system等基础测试工具,都是用过的,但是没有记录,都逐渐忘了。所以写这篇博客总结记录一下,只要以后发现新的用法,就记得来编辑补充一下 perf 比较基础的用法: 先改这…...

MODBUS TCP转CANopen 技术赋能高效协同作业
在现代工业自动化领域,MODBUS TCP和CANopen两种通讯协议因其稳定性和高效性被广泛应用于各种设备和系统中。而随着科技的不断进步,这两种通讯协议也正在被逐步融合,形成了一种新型的通讯方式——开疆智能MODBUS TCP转CANopen网关KJ-TCPC-CANP…...
现代密码学 | 椭圆曲线密码学—附py代码
Elliptic Curve Cryptography 椭圆曲线密码学(ECC)是一种基于有限域上椭圆曲线数学特性的公钥加密技术。其核心原理涉及椭圆曲线的代数性质、离散对数问题以及有限域上的运算。 椭圆曲线密码学是多种数字签名算法的基础,例如椭圆曲线数字签…...

Go 语言并发编程基础:无缓冲与有缓冲通道
在上一章节中,我们了解了 Channel 的基本用法。本章将重点分析 Go 中通道的两种类型 —— 无缓冲通道与有缓冲通道,它们在并发编程中各具特点和应用场景。 一、通道的基本分类 类型定义形式特点无缓冲通道make(chan T)发送和接收都必须准备好࿰…...