中国水果采摘机器人行业市场研究及发展趋势分析报告
全版价格:壹捌零零
报告版本:下单后会更新至最新版本
交货时间:1-2天
第一章 2016-2026年中国水果采摘机器人行业总概
1.1 中国水果采摘机器人行业发展概述
机器人技术的发展是一个国家高科技水平和工业自动化程度的重要标志和体现。机器人集成了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多学科的发展成果,代表高技术的发展前沿,是当前科技研究的热点方向。21世纪是农业机械化向智能化方向发展的重要历史时期。我国是一个农业大国,要实现农业现代化,农业装备的机械化、智能化是发展的必然趋势。
随着计算机和自动控制技术的迅速发展,机器人已逐步进入农业生产领域。目前,国内浆果采摘作业基本上都是靠人工完成的,采摘效率低,费用占成本的比例约为50%-70%。采摘机器人作为农业机器人的重要类型,其作用在于能够降低工人劳动强度和尘产费用、提高劳动生产率和产品质量、保证果实适时采收,因而具有很大的发展潜力。
水果采摘机器人是一种针对水果,具备自主作业能力并且可以通过编程来适应不同的工作环境的自动收获系统。它集成了横跨几个学科的知识,包括机械结构、视觉成像、运动学、传感器技术、控制技术和计算信息处理等。水果采摘机器人的出现解决了农业劳动力的短缺问题,大大减轻了农民的劳动强度,提高了水果的收获质量,降低了收割成本,提高劳动生产率,确保水果能得到及时的采收,提高水果产品的市场竞争力。
1.2 中国水果采摘机器人行业发展历程
国内在农业机器人方面的研究始于20世纪90年代中期,与发达国家相比,虽然起步较晚,但不少大专院校、研究所都在进行采摘机器人和智能农业机械方面的研究,已有很多研究成果披露,简介如下:
l、林木球果采摘机器人:东北林业大学的陆怀民研制了林木球果采摘机器人,主要由5自由度机械手、行走机构、液压驱动系统和单片机控制系统组成。采摘时,机器人停在距离母树3.5m处,操纵机械手回转马达对准母树。然后,单片机控制系统控制机械手大、小臂同时柔性升起达到~定高度,采摘爪张开并摆动,对准要采集的树枝,大小臂同时运动,使采摘爪沿着树枝生长方向趋近1.5-2m,然后采摘爪的梳齿夹拢果技,大小臂带动采集爪按原路向后返回,梳下枝上的球果完成一次采摘。这种机器人效率是500k∥天,是人工的30一50倍。而且,采摘时对母树的破坏较小,采净率较高。
2、蘑菇采摘机器人:吉林工业大学的周云山等人研究了蘑菇采摘机器人。该系统主要由蘑菇传送带、摄像机、采摘机器手、二自由度气动伺服机构、机器手抓取控制系统和计算机等组成。计算机视觉系统为蘑菇采摘机器提供分类所需的尺寸、面积信息,并且引导机器手准确抵达待采摘蘑菇的中心位置,防止因对不准造成抓取失败或损伤蘑菇。
3、草莓采摘机器人:中国农业大学的张铁中等人针对我国常见的温室罩垄作栽培的草莓设计了3种采摘机器人。分别采用桥架式、4自由度毛门式和3自由度直角坐标形式的机械手进行跨行收获,通过彩色CCD传感系统获取彩色图像,经过图像处理进行目标草莓的识别和定位,进而控制末端执行器进行收获。同时,对草莓的生物特性、成熟度、多个草莓遮挡等实际问题进行了研究,为草莓采摘提供设计依据和理论基础。
4、番茄采摘机器人:南京农业大学的张瑞合、姬长英等人在番茄采摘中运用双目立体视觉技术对红色番茄进行定位,将图像进行灰度变换,而后对图像的二维直方图进彳亍腐蚀、膨胀以去除小团块,提取背景区边缘,然后用拟合曲线实现彩色图像的分割,将番茄从背景中分离出来。对目标进行标定后,用面积匹配实现共轭图像中目标的配准。运用体视成像原理,从两幅二维图像中恢复目标的三维坐标。通过分析实验数据得出的结论为.当目标与摄像机的距离为300mm-400mm时,深度误差可控制在3%-4%左右。
5、黄瓜采摘机器人:中国农业大学汤修映等人研制了6自由度黄瓜采摘机器人,采用基于RGB三基色模型的G分量来进行图像分割,在特征提取后确定出黄瓜果实的采摘点,未端执行器的活动刃口平移接近固定刃口,通过简单的开合动作剪切掉黄瓜。同时,提出了新的适合机器人自动化采摘的斜栅网架式黄瓜栽培模式。
6、节果采摘机器人:中国农业大学的孙明等人为苹果采摘机器人开发了一套果实识别机器视觉系统,并成功研究了一种使二值图像的像素分割下确率大于80%的彩色图像处技术。通过对果实、叶、茎等的色泽信号浓度频率谱图的分析,求阀值,然后运用此值对彩色图像进行二值化处理。
第二章 中国水果采摘机器人行业发展环境
2.1 行业发展环境分析
2.1.1 行业技术变化分析
(1)行业专利申请数量
统计数据显示,2022年4月从国家知识产权局专利检索及分析系统中检索关键词“水果采摘机器人”,得出2016-2021年我国水果采摘机器人相关专利申请数量如下图表所示。其中,2021年我国水果采摘机器人相关专利申请数量为148个。
图表:2016-2021年我国水果采摘机器人相关专利申请数量
| 年份 | 2016-2021年我国水果采摘机器人相关专利申请数量(个) |
|---|---|
| 2016年 | 45 |
| 2017年 | 135 |
| 2018年 | 181 |
| 2019年 | 146 |
| 2020年 | 144 |
| 2021年 | 148 |
数据参考来源:国家知识产权局以及彦心咨询整理,2022年4月
(2)行业专利公开数量
统计数据显示,2022年4月从国家知识产权局专利检索及分析系统中检索关键词“水果采摘机器人”,得出2017-2022年4月我国水果采摘机器人相关专利公开数量如下图表所示。其中,2021年我国水果采摘机器人相关专利公开数量为224个。截至2022年4月,我国水果采摘机器人相关专利公开总数量为966个。
图表:2017-2022年4月我国水果采摘机器人相关专利公开数量
| 年份 | 2017-2022年4月我国水果采摘机器人相关专利公开数量(个) |
|---|---|
| 2017年 | 58 |
| 2018年 | 152 |
| 2019年 | 159 |
| 2020年 | 158 |
| 2021年 | 224 |
| 2022年1-4月 | 42 |
数据参考来源:国家知识产权局以及彦心咨询整理,2022年4月
(3)行业热门专利类型
统计数据显示,截至2022年4月中国水果采摘机器人各技术领域专利数量统计如下图表所示:
图表:中国水果采摘机器人各技术领域专利数量统计
| 技术领域 | 中国水果采摘机器人各技术领域专利数量统计(个) |
|---|---|
| A01D46/30 | 657 |
| B25J11/00 | 134 |
| A01D46/24 | 107 |
| B25J5/00 | 89 |
| B25J9/16 | 83 |
| A01D46/22 | 68 |
| A01D46/00 | 68 |
| B25J15/00 | 55 |
| A01D45/00 | 47 |
| B25J15/08 | 44 |
| 其他 | 1025 |
数据参考来源:国家知识产权局以及彦心咨询整理,2022年4月
(4)行业专利申请人排行
统计数据显示,截至2022年4月中国水果采摘机器人各专利申请人专利数量统计如下图表所示:
图表:中国水果采摘机器人各专利申请人专利数量统计
| 专利申请人 | 水果采摘机器人专利数量统计(个) |
|---|---|
| 西北农林科技大学 | 67 |
| 江苏大学 | 56 |
| 华南农业大学 | 26 |
| 南京工程学院 | 24 |
| 中国农业大学 | 24 |
| 浙江工业大学 | 19 |
| 仲恺农业工程学院 | 13 |
| 南京农业大学 | 13 |
| 山东农业大学 | 11 |
| 山西农业大学 | 11 |
| 其他 | 750 |
数据参考来源:国家知识产权局以及彦心咨询整理,2022年4月
(5)行业最新专利技术信息
国家知识产权局资料显示,近期中国水果采摘机器人相关专利技术创新情况如下图表所示:
图表:近期中国水果采摘机器人相关专利技术创新情况
| 公开时间 | 专利申请号 | 专利名称 | 专利申请人 |
|---|---|---|---|
| 2022.03.01 | CN202111611516.6 | 基于牛顿迭代法的香蕉采摘机器人逆运动学计算方法 | 仲恺农业工程学院 |
| 2022.03.11 | CN202111526993.2 | 一种智能控制的采摘机器人 | 河南理工大学 |
| 2022.03.18 | CN202130800989.5 | 茶叶采摘机器人 | 山东大学 |
| 2022.02.25 | CN202111409214.0 | 基于数字双胞胎的采摘方法及云采摘机器人系统 | 杭州乔戈里科技有限公司 |
| 2022.03.04 | CN202111413237.9 | 一种智能采摘机器人的收集装置 | 重庆科创职业学院 |
| 2022.01.11 | CN202111407141.1 | 一种适用于采摘机器人的无碰撞运动规划方法及装置 | 镇江大全现代农业发展有限公司 |
| 2022.02.25 | CN202111397333.9 | 一种多臂协同棚架快速采摘机器人 | 安徽科技学院 |
| 2021.12.21 | CN202111364149.4 | 采摘机器人重心控制方法、装置、电子设备及存储介质 | 季华实验室 |
| 2022.03.08 | CN202111364149.4 | 采摘机器人重心控制方法、装置、电子设备及存储介质 | 季华实验室 |
| 2022.02.11 | CN202111322224.0 | 一种可对不同位置采摘的番茄机器人 | 山西农业大学 |
| 2022.03.04 | CN202111322235.9 | 一种可自适应不同高度的番茄采摘机器人 | 山西农业大学 |
| 2021.12.03 | CN202111306468.X | 果实采摘机器人控制方法、装置、电子设备及存储介质 | 季华实验室 |
数据参考来源:国家知识产权局以及彦心咨询整理,2022年4月
2.1.2 产业组织创新分析
随着农业科技的不断发展,对水果采摘机器人采摘装置的研究越来越多。目前,研制成功的水果采摘机器人主要分为葡萄、番茄、苹果、草莓、猕猴桃、甘蔗和柑橘等类型。水果采摘机器人一般由视觉识别系统、末端执行器和机械手臂组成,下面我们将列举几种不同的水果采摘装置进行比较。
河南工业职业技术学院郭素娜团队设计了一款具有自主导航的葡萄采摘机器人,该机器人通过视觉系统识别成熟葡萄,再利用无线传感器进行定位,确定目标葡萄位置后,驱动柔性末端执行器配合移动系统采摘葡萄,最终完成葡萄采摘作业。通过对葡萄采摘机器人的性能进行了测试,发现该机器人对装有传感器的葡萄树的准确识别率达到了95%以上,对葡萄成熟度的判断达到了98%以上,是一种相对高效的葡萄采摘机器人。
中国农业大学张帆团队设计了一种温室黄瓜采摘机器人,该采摘机器人由自主移动平台、视觉伺服系统、采摘末端执行器组成,在针对黄瓜物理特性差异大、果皮脆嫩易损伤、果实叶片相互遮挡和采摘环境光照复杂多变和近色系果实目标识别等问题,设计了具有果实遮挡探测功能的柔性采收末端执行器和提出基于光谱图像的近色系黄瓜识别方法,可实现对果实的无损抓持、对果梗的准确切割和自然环境下果实与背景的有效分割等特点。进行采摘工作时,需要先由视觉伺服系统进行图像的识别与处理,然后根据其他的相关特征找到黄瓜的最适采摘点,最后利用柔性的采摘末端执行器配合自主移动平台将黄瓜摘取温室黄瓜采摘机器人。经机器人采摘作业测试,该机器人采摘装置整体性能较好,具备一定的实用性和推广价值,为农业机器人进入自然环境作业提供一种借鉴手段与实现模式。
上海交通大学赵源深团队对西红柿采摘机器人目标识别、定位与控制技术进行了研究,提出了基于EtherCAT总线的西红柿采摘机器人驱动控制系统和基于Arduino的控制系统,试验表明,采用级联分类器的西红柿识别正确识别率可达95%以上,误识别率控制在5%左右,并且具有非常好的鲁棒性和快速性,并且为了实现西红柿采摘机器人对目标果实和采摘手抓的空间定位和消除西红柿采摘机器人双目定位和运动控制中存在空间定位误差,在其中应用一种基于双目定位和视觉伺服的西红柿采摘机器人控制方式。深层次优化了西红柿采摘机器人对目标识别的准确性。
重庆理工大学胡友呈团队研制的柑橘采摘机器人,先利用双目相机获得果树的图像,通过分析噪声特性、图像增强、中值滤波对图像进行预处理,减少了噪声干扰,增大了图像对比度,采用深度卷积神经网络物体检测算法,对柑橘进行识别定位及障碍物类型判断,利用基于区域特征的SVM分割方法实现柑橘果实的分割和定位,并采用最小二乘法对分割区域进行椭圆拟合还原真实柑橘果实,获取采摘中心点,然后将果实的信息传送到控制系统,接着控制系统操纵机械臂进行采摘运动,柑橘采摘成功。实验结果表明:柑橘果实识别准确率为86%,树枝障碍物分类准确率59.5%,柑橘果实误差率为7.2%,机器人采摘的成功概率大约为80%,避开障碍物成功率已经达到60%。
桂林电子科技大学黄国明等人设计了一种新型的自动采摘苹果的机器人。该苹果采摘机器人由4部分组成,分别是移动平台、双目视觉系统、机械臂、末端执行器,该机器人移动平台采用四轮驱动的方式,且装有激光测距仪,防止撞到前面的障碍物,末端执行器采摘水果时用的是气动铡刀。双目视觉系统(Binocularvision system)用的是两台CCD (Charge-coupledDevice)摄像机,用来辨别成熟的果实和确定果实的位置。试验表明,该苹果采摘机器人识别果实的正确率到了90%,采摘的成功率达到了91.31%。
桂林理工大学冯国亮团队研制了一种基于计算机视觉具有高精度、高效率的桃子采摘机器人。该机器人通过模拟人工采摘方式来采摘桃子,系统主要有移动端和PC端,移动端主要由摄像头、移动机构、超声波测定距离、末端执行器和机械臂构成;PC端对采集到的图像处理以及调整移动端。在机器人采摘工作时,工人可以运用智能摄像机、超声波、实时跟踪与定位系统,随时准确定位移动的水果。
2.1.3 社会习惯变化分析
水果的收获是传统农业生产链中劳动强度较大、时效性要求较高的部分,随着种植规模的增长,其工作成本正在不断提高。由于工业生产的快速发展以及城镇化率的不断上升,大量的农业劳动力正在向城镇转移,人口老龄化的程度在不断加重,农业生产的劳动力不断减少。在这种情况下,仅靠人力劳动并不能满足现有需求。近年来随着视觉识别技术的进步和智能控制理论的发展,使用机器人来采摘水果已经成为了一种现实趋势。
2.1.4 政府政策情况分析
近四年来,农业农村部、国务院、国家发改委、工业和信息化部等部门均发布推动农业机器人行业发展相关政策,其中2020年底,多部门联合印发的《“十四五”机器人产业发展规划》提到,重点研制果园除草、精准植保、采摘收获、畜禽喂料、淤泥清理等农业机器人。在政策推动下,水果采摘机器人市场将持续向好发展。
2.2 国内外行业竞争分析
2.2.12021年中国水果采摘机器人市场竞争分析
据企查查统计数据显示,2016-2021年我国水果采摘机器人新增企业数量如下图表所示。截止到2022年4月,我国共有342家水果采摘机器人相关的企业,其中2021年我国水果采摘机器人新增企业数量为1572家。从区域分布来看,江苏省以41家水果采摘机器人相关企业排得第一,广东省和浙江省分列第二三位。
图表:2016-2021年中国水果采摘机器人新增企业数量
| 年份 | 2016-2021年中国水果采摘机器人新增企业数量(家) |
|---|---|
| 2016年 | 21 |
| 2017年 | 24 |
| 2018年 | 22 |
| 2019年 | 30 |
| 2020年 | 39 |
| 2021年 | 11 |
| 2022年4月 | 2 |
数据参考来源:企查查以及彦心咨询整理,2022年4月
图表:2022年4月我国水果采摘机器人企业注册资金分布
| 注册资金 | 2022年4月我国水果采摘机器人企业注册资金分布(家) |
|---|---|
| 100万以内 | 43 |
| 100-200万 | 34 |
| 200-500万 | 25 |
| 500-1000万 | 39 |
| 1000-5000万 | 63 |
| 5000万以上 | 138 |
数据参考来源:企查查以及彦心咨询整理,2022年4月
目 录
第一章 2016-2026年中国水果采摘机器人行业总概 6
1.1 中国水果采摘机器人行业发展概述 6
1.2 中国水果采摘机器人行业发展历程 6
1.3 2016-2026年中国水果采摘机器人行业市场规模 8
1.4 水果采摘机器人细分类型的市场分析 9
1.4.1 2016-2026年中国自动摘果机市场规模 9
1.4.2 2016-2026年中国半自动水果采摘机市场规模 10
1.5 水果采摘机器人在不同应用领域的市场规模分析 12
1.5.1 2016-2026年中国草莓采摘领域的市场规模 12
1.5.2 2016-2026年中国苹果采摘领域的市场规模 13
1.5.3 2016-2026年中国其他领域的市场规模 15
1.6 中国各地区水果采摘机器人市场规模分析 17
1.6.1 2016-2026年华北水果采摘机器人市场规模 17
1.6.2 2016-2026年华中水果采摘机器人市场规模 18
1.6.3 2016-2026年华南水果采摘机器人市场规模 19
1.6.4 2016-2026年华东水果采摘机器人市场规模 21
1.6.5 2016-2026年东北水果采摘机器人市场规模 22
1.6.6 2016-2026年西南水果采摘机器人市场规模 24
1.6.7 2016-2026年西北水果采摘机器人市场规模 25
第二章 中国水果采摘机器人行业发展环境 28
2.1 行业发展环境分析 28
2.1.1 行业技术变化分析 28
(1)行业专利申请数量 28
(2)行业专利公开数量 29
(3)行业热门专利类型 30
(4)行业专利申请人排行 31
(5)行业最新专利技术信息 32
2.1.2 产业组织创新分析 33
2.1.3 社会习惯变化分析 35
2.1.4 政府政策情况分析 35
2.2 国内外行业竞争分析 36
2.2.1 2021年中国水果采摘机器人市场竞争分析 36
2.2.2 2021年中国水果采摘机器人市场集中度分析 38
2.3 中国水果采摘机器人行业发展中存在的问题及对策 39
第三章 水果采摘机器人行业产业链分析 41
3.1 水果采摘机器人行业产业链 41
3.2 水果采摘机器人上游行业分析 42
3.2.1 上游行业发展现状 42
3.2.2 上游行业发展预测 43
3.3 水果采摘机器人下游行业分析 45
3.3.1 下游行业发展现状 45
3.3.2 下游行业发展预测 46
第四章 水果采摘机器人细分类型市场 48
4.1 主要细分类型的市场结构分析 48
4.2 水果采摘机器人行业主要细分类型的市场规模分析 49
4.2.1 自动摘果机市场规模 49
4.2.2 半自动水果采摘机市场规模 50
第五章 水果采摘机器人市场最终用户细分 52
5.1 最终用户的下游客户端分析 52
5.2 主要最终用户的市场结构分析 53
5.3 水果采摘机器人主要最终用户市场规模分析 54
5.3.1 水果采摘机器人在草莓采摘领域的市场规模 54
5.3.2 水果采摘机器人在苹果采摘领域的市场规模 55
5.3.3 水果采摘机器人在其他领域的市场规模 56
第六章 中国主要地区水果采摘机器人市场分析 57
6.1 中国主要地区水果采摘机器人产量与产值分析 57
6.2 中国主要地区水果采摘机器人销量与销量值分析 60
第七章 华北地区水果采摘机器人市场分析 64
7.1 华北地区水果采摘机器人主要类型格局分析 64
7.2 华北地区水果采摘机器人主要最终用户的格局分析 65
第八章 华中地区水果采摘机器人市场分析 68
8.1 华中地区水果采摘机器人主要类型格局分析 68
8.2 华中地区水果采摘机器人主要最终用户的格局分析 69
第九章 华南地区水果采摘机器人市场分析 72
9.1 华南地区水果采摘机器人主要类型格局分析 72
9.2 华南地区水果采摘机器人主要最终用户的格局分析 73
第十章 华东地区水果采摘机器人市场分析 76
10.1 华东地区水果采摘机器人主要类型格局分析 76
10.2 华东地区水果采摘机器人主要最终用户的格局分析 77
第十一章 东北地区水果采摘机器人市场分析 80
11.1 东北地区水果采摘机器人主要类型格局分析 80
11.2 东北地区水果采摘机器人主要最终用户的格局分析 81
第十二章 西南地区水果采摘机器人市场分析 84
12.1 西南地区水果采摘机器人主要类型格局分析 84
12.2 西南地区水果采摘机器人主要最终用户的格局分析 85
第十三章 西北地区水果采摘机器人市场分析 88
13.1 西北地区水果采摘机器人主要类型格局分析 88
13.2 西北地区水果采摘机器人主要最终用户的格局分析 89
第十四章 主要企业 92
14.1 Abundant Robotics 92
14.1.1 Abundant Robotics-公司简介和最新发展 92
14.1.2 市场表现 92
14.1.3 产品服务和介绍 93
14.2 AGROBOT 93
14.2.1 AGROBOT-公司简介和最新发展 93
14.2.2 市场表现 94
14.2.3 产品服务和介绍 94
14.3 Dogtooth Technologies 94
14.3.1 Dogtooth Technologies-公司简介和最新发展 94
14.3.2 市场表现 95
14.4 FFRobotics 95
14.4.1 FFRobotics-公司简介和最新发展 95
14.4.2 市场表现 96
14.4.3 产品服务和介绍 96
14.5 Harvest Croo 96
14.5.1 Harvest Croo-公司简介和最新发展 96
14.5.2 市场表现 97
14.5.3 产品服务和介绍 97
14.6 OCTINION 98
14.6.1 OCTINION-公司简介和最新发展 98
14.6.2 市场表现 98
14.6.3 产品服务和介绍 99
第十五章 研究结论及投资建议 100
15.1 水果采摘机器人行业研究结论 100
15.2 水果采摘机器人行业投资建议 100
15.2.1 行业发展策略建议 100
15.2.2 行业投资方向建议 101
15.2.3 行业投资方式建议 101
相关文章:

中国水果采摘机器人行业市场研究及发展趋势分析报告
全版价格:壹捌零零 报告版本:下单后会更新至最新版本 交货时间:1-2天 第一章 2016-2026年中国水果采摘机器人行业总概 1.1 中国水果采摘机器人行业发展概述 机器人技术的发展是一个国家高科技水平和工业自动化程度的重要标志和体现。机器…...

Linux多进程与信号
在多进程的服务程序中,如果子进程收到退出信号,子进程自行退出。如果父进程收到退出信号,应该先向全部的子进程发送退出信号,然后自己再退出。 演示demo程序 #include <iostream> // 包含输入输出流库,用于输…...

Self-attention与Word2Vec
Self-attention(自注意力)和 Word2Vec 是两种不同的词嵌入技术,用于将单词映射到低维向量空间。它们之间的区别: Word2Vec: Word2Vec 是一种传统的词嵌入(word embedding)方法,旨在为…...
【Flutter/Android】运行到安卓手机上一直卡在 Running Gradle task ‘assembleDebug‘... 的终极解决办法
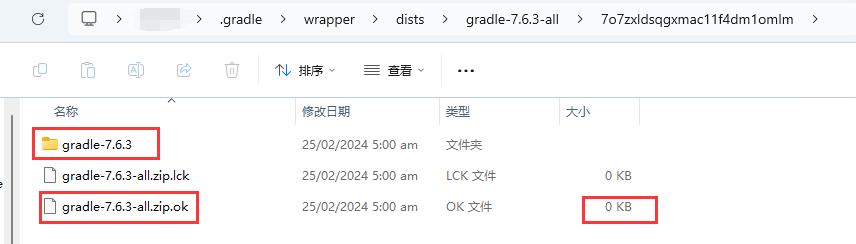
方法步骤简要 查看你的Flutter项目需要什么版本的 Gradle 插件: 下载这个插件: 方法一:浏览器输入:https://services.gradle.org/distributions/gradle-7.6.3-all.zip 方法二:去Gradle官网找对应的版本:h…...

医疗实施-客户需求分析
在我的日常系统实施过程中,总会遇到不同角色的客户提出不同类别的需求。有的需求,客户目的想提高操作便携,但会对系统稳定性存在风险,应该拒掉。有些需求紧急而且影响重大,应该紧急处理。有些需求可以做,但…...
调度服务看门狗配置
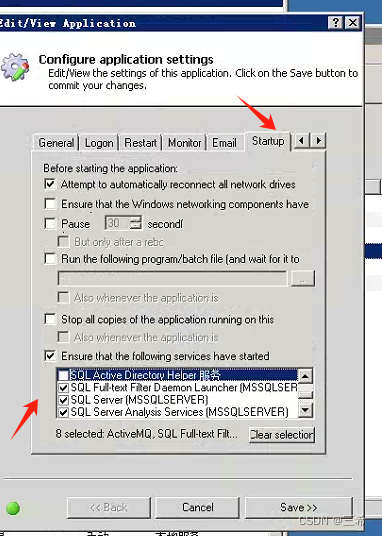
查看当前服务器相关的sqlserver服务 在任务栏右键,选择点击启动任务管理器 依次点击,打开服务 找到sqlserver 相关的服务, 确认这些服务是启动状态 将相关服务在看门狗中进行配置 选择调度服务,双击打开 根据上面找的服务进行勾…...

AI时代 编程高手的秘密武器:世界顶级大学推荐的计算机教材
文章目录 01 《深入理解计算机系统》02 《算法导论》03 《计算机程序的构造和解释》04 《数据库系统概念》05 《计算机组成与设计:硬件/软件接口》06 《离散数学及其应用》07 《组合数学》08《斯坦福算法博弈论二十讲》 清华、北大、MIT、CMU、斯坦福的学霸们在新学…...
【数据结构和算法初阶(c语言)】数据结构前言,初识数据结构(给你一个选择学习数据结构和算法的理由)
1.何为数据结构 数据结构(Data Structure)是计算机存储、组织数据的方式,指相互之间存在一种或多种特定关系的 数据元素的集合。本质来讲就是在内存中去管理数据方式比如我们的增删查改。在内存中管理数据的方式有很多种(比如数组结构、链式结构、树型结…...
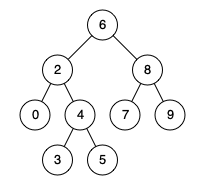
LeetCode 0235.二叉搜索树的最近公共祖先:用搜索树性质(不遍历全部节点)
【LetMeFly】235.二叉搜索树的最近公共祖先:用搜索树性质(不遍历全部节点) 力扣题目链接:https://leetcode.cn/problems/lowest-common-ancestor-of-a-binary-search-tree/ 给定一个二叉搜索树, 找到该树中两个指定节点的最近公…...

【Prometheus】概念和工作原理介绍
目录 一、概述 1.1 prometheus简介 1.2 prometheus特点 1.3 prometheus架构图 1.4 prometheus组件介绍 1、Prometheus Server 2、Client Library 3、pushgateway 4、Exporters 5、Service Discovery 6、Alertmanager 7、grafana 1.5 Prometheus 数据流向 1.6 Pro…...

四川易点慧电子商务有限公司抖音小店:可靠之选,购物新体验
在当今这个网络购物日益盛行的时代,选择一家可靠的电商平台成为了消费者最为关心的问题之一。四川易点慧电子商务有限公司抖音小店作为新兴的电商力量,凭借其独特的魅力和优势,正逐渐成为众多消费者心中的可靠之选。 易点慧电子商务有限公司在…...

SpringBoot自带的tomcat的最大连接数和最大的并发数
先说结果:springboot自带的tomcat的最大并发数是200, 最大连接数是:max-connectionsaccept-count的值 再说一下和连接数相关的几个配置: 以下都是默认值: server.tomcat.threads.min-spare10 server.tomcat.threa…...

TLS1.2抓包解析
1.TLS1.2记录层消息解析 Transport Layer SecurityTLSv1.2 Record Layer: Handshake Protocol: Client HelloContent Type: Handshake (22)Version: TLS 1.0 (0x0301)Length: 253Content Type:消息类型,1个字节。 i 0Version:协议版本&…...
使用两个队列实现栈
在计算机科学中,栈是一种数据结构,它遵循后进先出(LIFO)的原则。这意味着最后一个被添加到栈的元素将是第一个被移除的元素。然而,Java的标准库并没有提供栈的实现,但我们可以使用两个队列来模拟一个栈的行…...

通过ffmpeg实现视频背景色替换
最近遇到一个需求,希望可以将素材视频的绿幕背景替换为指定的颜色,然后通过裁剪,拼接等处理制作一个新的视频。所以替换背景色成为了重要的一环,看能否通过ffmpeg来实现。通过一番搜索尝试,发现方案可行。下面我整理一…...

后轮位置反馈控制与算法仿真实现
文章目录 1. 后轮反馈控制2. 算法原理3. 算法和仿真实现 1. 后轮反馈控制 后轮反馈控制(Rear wheel feedback)算法是利用后轮中心的跟踪偏差来进行转向控制量计算的方法,属于Frenet坐标系的一个应用。通过选择合适的李雅普诺夫函数设计控制率…...
实战 vue3 使用百度编辑器ueditor
前言 在开发项目由于需求vue自带对编辑器不能满足使用,所以改为百度编辑器,但是在网上搜索发现都讲得非常乱,所以写一篇使用流程的文章 提示:以下是本篇文章正文内容,下面案例可供参考 一、下载ueditor编辑器 一个“…...

N种方法解决1(CTF)
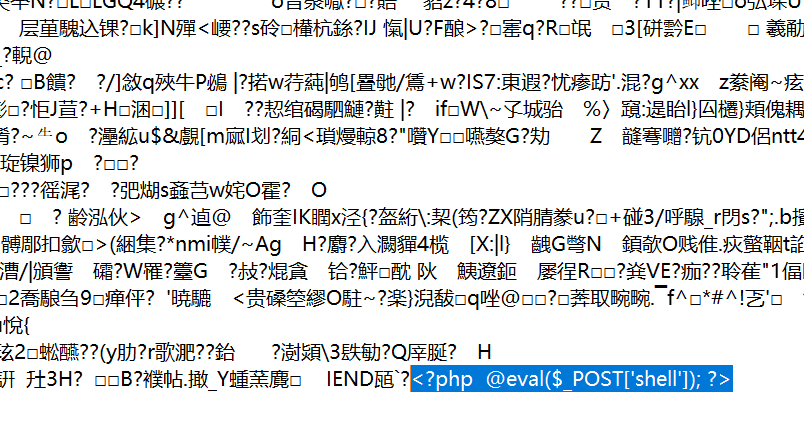
这里遇到的问题:一开始采用的base64解码平台有问题;默认解密出的格式为GBK格式;直接复制粘贴发现无法还原图片;又尝试了其他编码的;发现只有hex格式可以保证图片正常还原; 图片是以二进制存储的࿱…...
Istio实战:Istio Kiali部署与验证
目录 前言一、Istio安装小插曲 注意事项 二、Kiali安装三、Istio测试参考资料 前言 前几天我就开始捣腾Istio。前几天在执行istioctl install --set profiledemo -y 的时候老是在第二步就报错了,开始我用的istio版本是1.6.8。 后面查看k8s与istio的版本对应关系后发…...

ASPxGridView中使用PopupEditForm表单字段联动填充
c#中devexpress的控件ASPxGridView中使用PopupEditForm表单字段联动填充 //选择项目名称,自动填充项目编号 <Columns><dx:GridViewDataTextColumn FieldName"id" ReadOnly"True" VisibleIndex"0" Visible"False"…...
)
云计算——弹性云计算器(ECS)
弹性云服务器:ECS 概述 云计算重构了ICT系统,云计算平台厂商推出使得厂家能够主要关注应用管理而非平台管理的云平台,包含如下主要概念。 ECS(Elastic Cloud Server):即弹性云服务器,是云计算…...
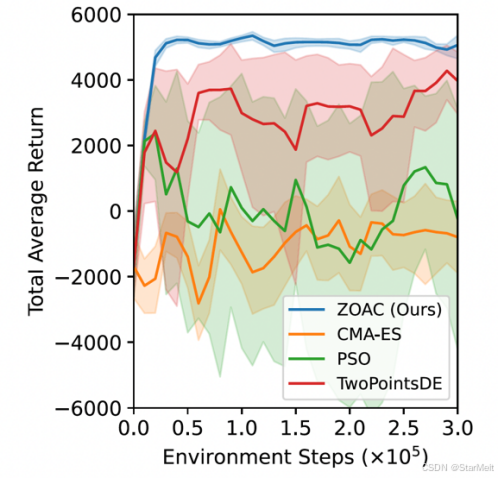
突破不可导策略的训练难题:零阶优化与强化学习的深度嵌合
强化学习(Reinforcement Learning, RL)是工业领域智能控制的重要方法。它的基本原理是将最优控制问题建模为马尔可夫决策过程,然后使用强化学习的Actor-Critic机制(中文译作“知行互动”机制),逐步迭代求解…...
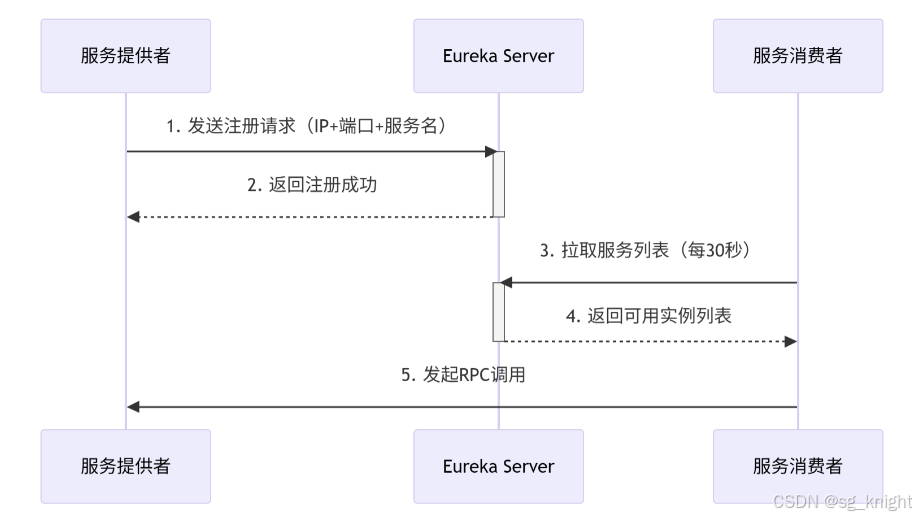
Springcloud:Eureka 高可用集群搭建实战(服务注册与发现的底层原理与避坑指南)
引言:为什么 Eureka 依然是存量系统的核心? 尽管 Nacos 等新注册中心崛起,但金融、电力等保守行业仍有大量系统运行在 Eureka 上。理解其高可用设计与自我保护机制,是保障分布式系统稳定的必修课。本文将手把手带你搭建生产级 Eur…...
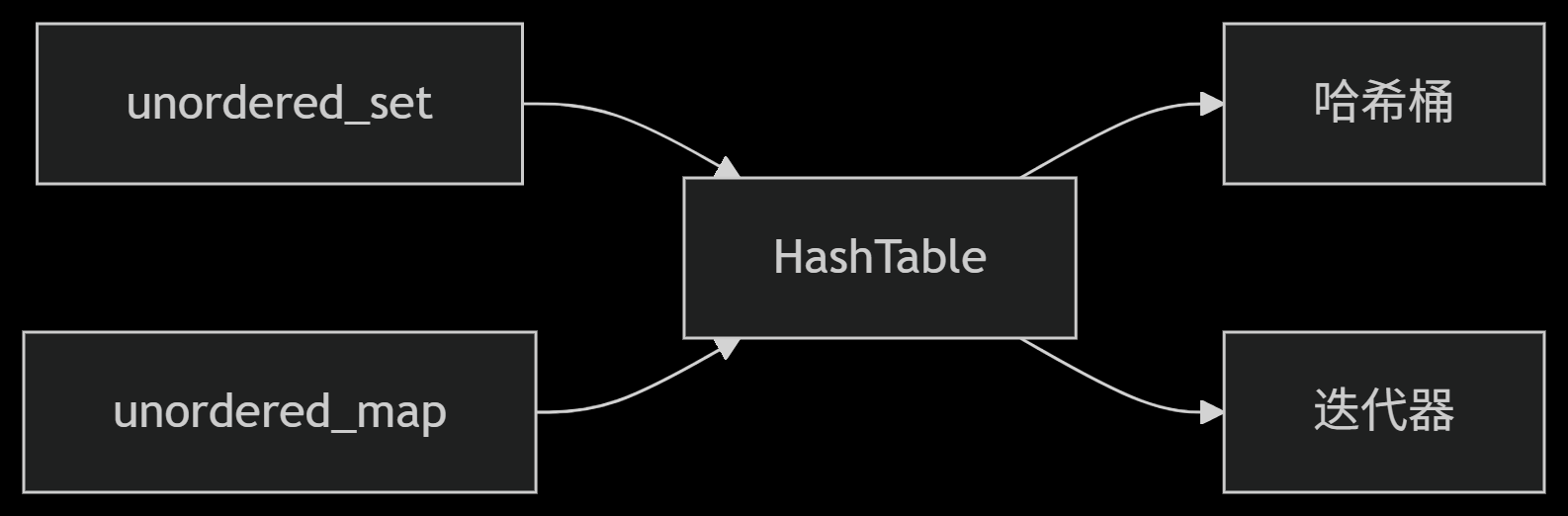
从零实现STL哈希容器:unordered_map/unordered_set封装详解
本篇文章是对C学习的STL哈希容器自主实现部分的学习分享 希望也能为你带来些帮助~ 那咱们废话不多说,直接开始吧! 一、源码结构分析 1. SGISTL30实现剖析 // hash_set核心结构 template <class Value, class HashFcn, ...> class hash_set {ty…...
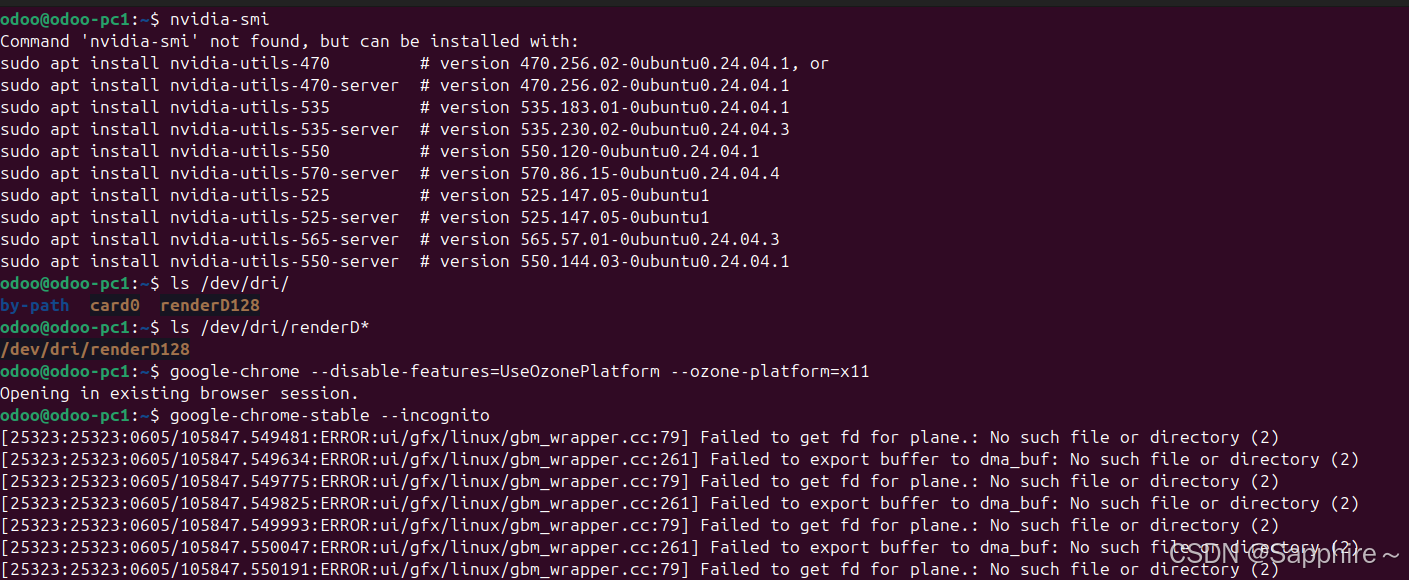
Linux-07 ubuntu 的 chrome 启动不了
文章目录 问题原因解决步骤一、卸载旧版chrome二、重新安装chorme三、启动不了,报错如下四、启动不了,解决如下 总结 问题原因 在应用中可以看到chrome,但是打不开(说明:原来的ubuntu系统出问题了,这个是备用的硬盘&a…...
k8s业务程序联调工具-KtConnect
概述 原理 工具作用是建立了一个从本地到集群的单向VPN,根据VPN原理,打通两个内网必然需要借助一个公共中继节点,ktconnect工具巧妙的利用k8s原生的portforward能力,简化了建立连接的过程,apiserver间接起到了中继节…...
零基础在实践中学习网络安全-皮卡丘靶场(第九期-Unsafe Fileupload模块)(yakit方式)
本期内容并不是很难,相信大家会学的很愉快,当然对于有后端基础的朋友来说,本期内容更加容易了解,当然没有基础的也别担心,本期内容会详细解释有关内容 本期用到的软件:yakit(因为经过之前好多期…...
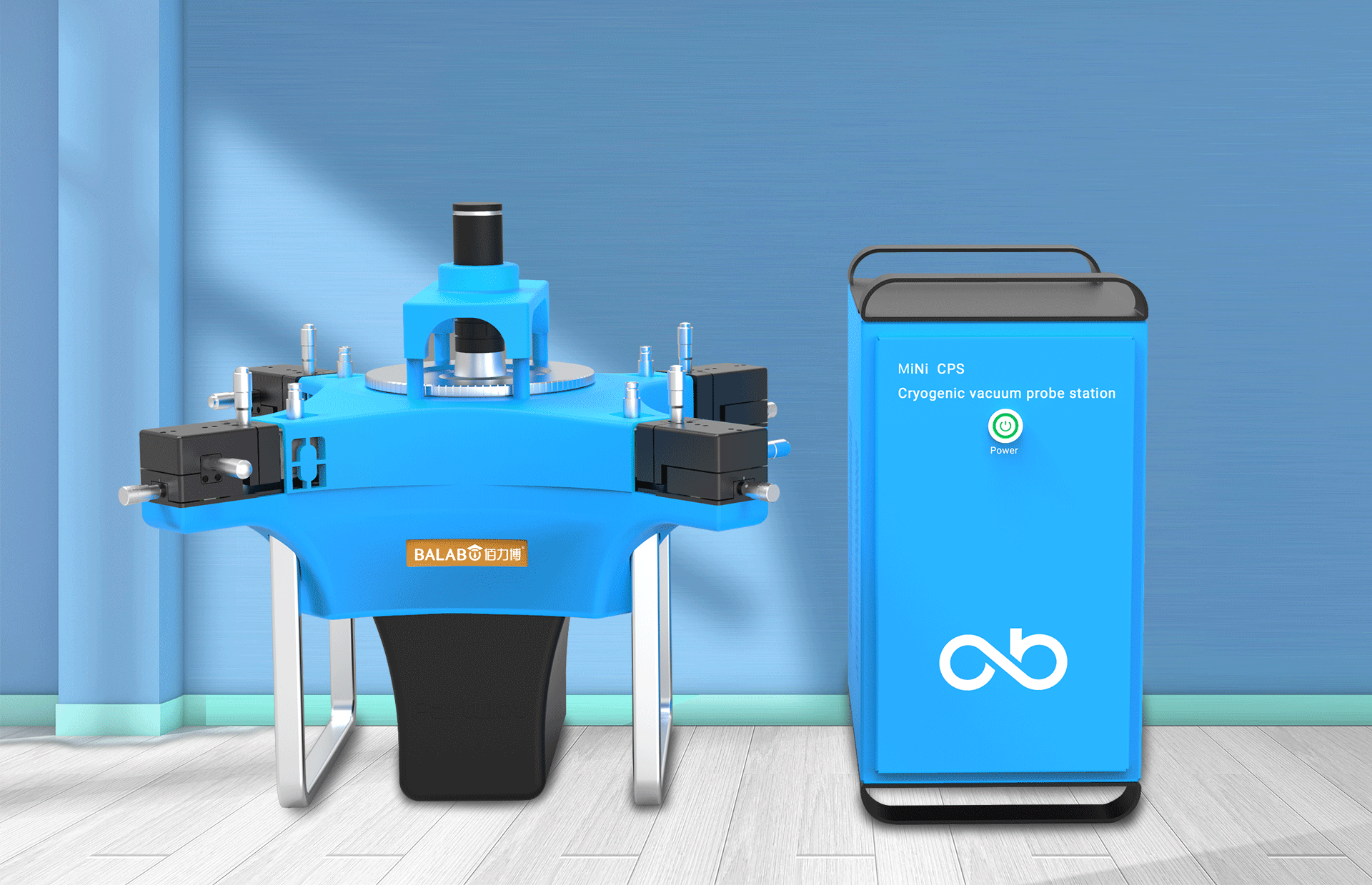
佰力博科技与您探讨热释电测量的几种方法
热释电的测量主要涉及热释电系数的测定,这是表征热释电材料性能的重要参数。热释电系数的测量方法主要包括静态法、动态法和积分电荷法。其中,积分电荷法最为常用,其原理是通过测量在电容器上积累的热释电电荷,从而确定热释电系数…...
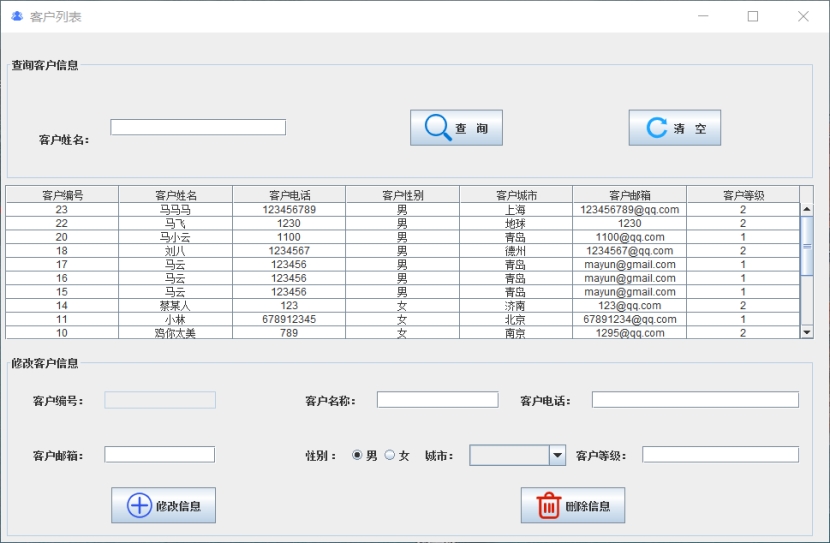
基于Java+MySQL实现(GUI)客户管理系统
客户资料管理系统的设计与实现 第一章 需求分析 1.1 需求总体介绍 本项目为了方便维护客户信息为了方便维护客户信息,对客户进行统一管理,可以把所有客户信息录入系统,进行维护和统计功能。可通过文件的方式保存相关录入数据,对…...
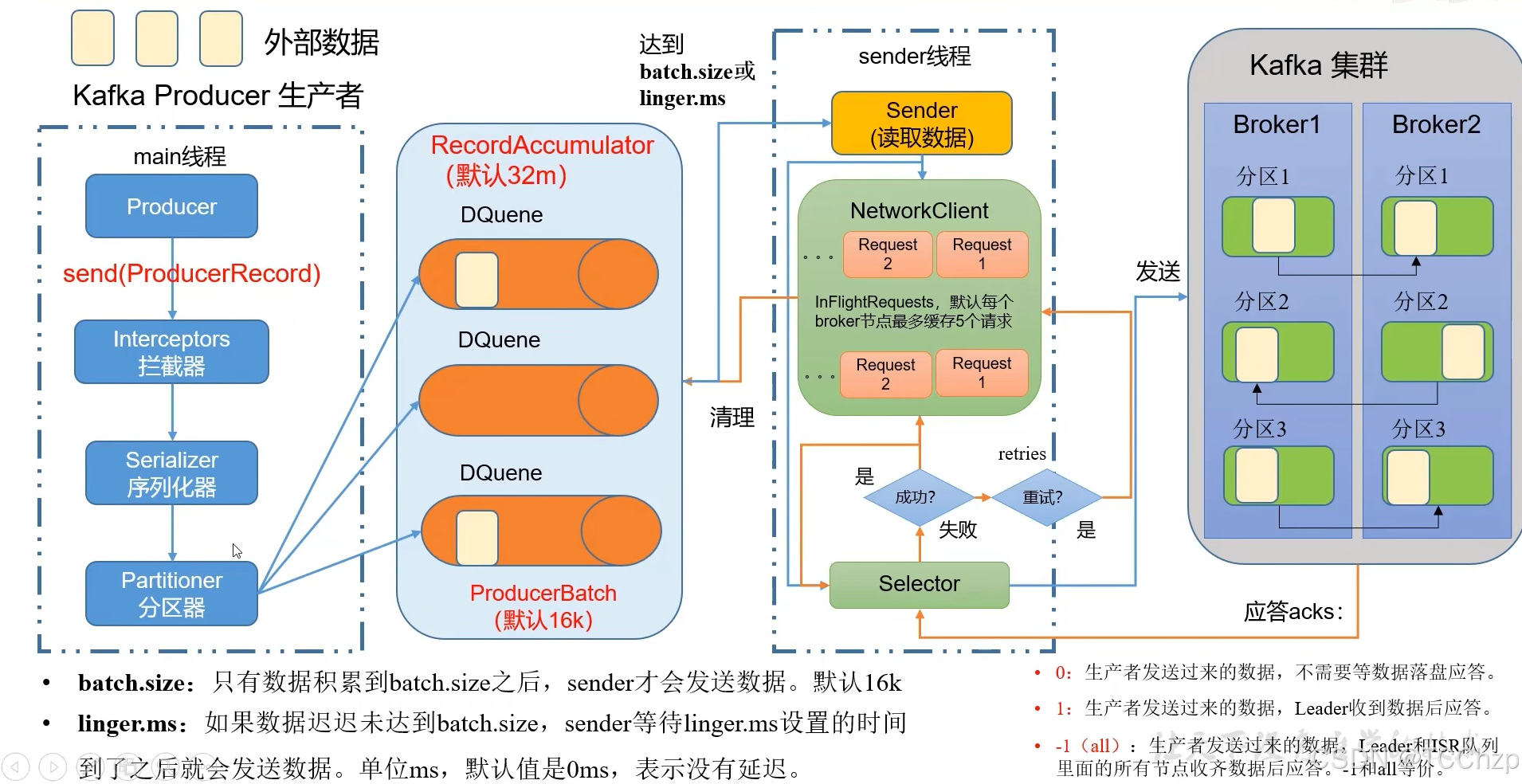
Kafka入门-生产者
生产者 生产者发送流程: 延迟时间为0ms时,也就意味着每当有数据就会直接发送 异步发送API 异步发送和同步发送的不同在于:异步发送不需要等待结果,同步发送必须等待结果才能进行下一步发送。 普通异步发送 首先导入所需的k…...