【FMCW 04】测角-Angle FFT
在之前的文章中,我们已经详尽讨论过FMCW雷达测距和测速的原理,现在来讲最后一块内容,测角。测角对于硬件设备具有要求,即要求雷达具有多发多收结构,从而形成多个空间信道(channel),我们正是利用这些channel间的差异性来完成对目标的测角。
本节讲述通用的Angle FFT测角的原理。
天线阵列
在一个具有多发多收的天线结构中,我们可以得到一个天线阵列(array)。一个Tx-Rx就构成了一个空间信道。

设相邻的两个天线之间排布间距为ddd,到达角(angle of arrival,AoA)为 θ\thetaθ,则相邻的两个天线之间会产生一个固定的光程差 dsinθd \sin \thetadsinθ,这个固定的光程差会造成相邻两个信道间接收回波固定的相位差。即
dsinθλ=Δϕ2π\frac{d \sin \theta}{\lambda}=\frac{\Delta \phi}{2\pi} λdsinθ=2πΔϕ
于是我们就有
sinθ=λ2πdΔϕ\sin\theta = \frac{\lambda}{2 \pi d} \Delta \phi sinθ=2πdλΔϕ
最大测量角度
由于
−π<Δϕ<π-\pi<\Delta \phi < \pi −π<Δϕ<π
所以最大测量角度为
θmax<arcsin(λ2d)\theta_{max} < \arcsin (\frac{\lambda}{2d}) θmax<arcsin(2dλ)
取天线阵列间距为λ2\frac{\lambda}{2}2λ时,就可得此时测量达到达到角的范围正好在±90°,即
−1<sinθ<1-1< \sin \theta < 1 −1<sinθ<1
−90∘<θ<90∘-90 ^{\circ} < \theta < 90^{\circ} −90∘<θ<90∘
但值得注意的是,虽然sinθ\sin \thetasinθ与我们的Δϕ\Delta \phiΔϕ成正比,但由于sinθ\sin \thetasinθ 函数本身的非线性,θ\thetaθ 在角度小时对Δϕ\Delta \phiΔϕ更敏感,或者说:在低角度范围(如AoA±30°)内测角的精度(或区分度)更高。
可以看下面的函数图来有一个直观的认识:当我们在sinθ\sin \thetasinθ轴取均匀标度,在θ\thetaθ 轴上的标度随角度的增加是越来越粗的。

相位差的周期性
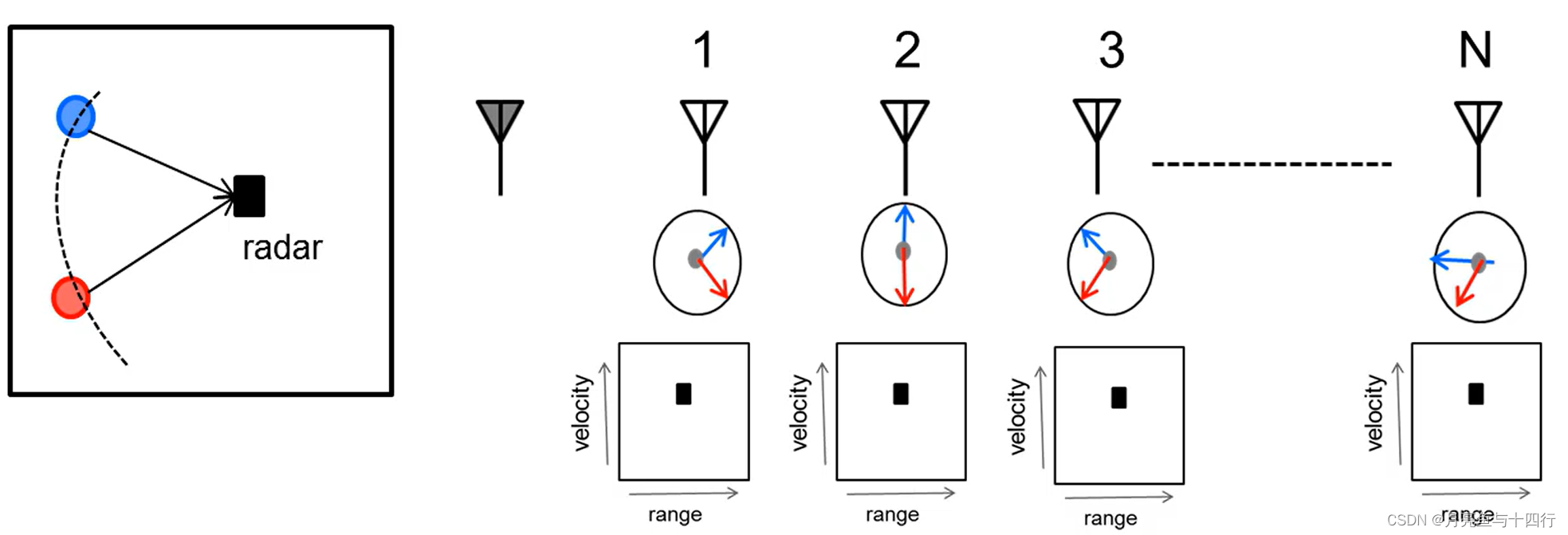
在之前 测速 的文章中,我们已经讨论过相位差的周期性,及其基于数字域角分辨率下的FFT结果。那么,现在由于N个信道所造成的固定相位差,同样也会形成这个一个相位差的周期性。
借用一幅TI教程的示意图,我们此时对在同一range bin中且又在同一 velocity bin中的两个运动物体进行区分,那么,如果其AoA不同,我们就可以借由 angle FFT 来完成对这两个运动物体的区分。
角度分辨率
看得出来,此处的推导与测速中的推导相近。在数字域上的角速度分辨率为
Δω=2πNradians/sampleΔω= \frac{2 \pi}{N} radians/sample Δω=N2πradians/sample
其中N为FFT的点数,继续令Δϕ=w\Delta \phi = wΔϕ=w,则
sin(θ+Δθ)−sin(θ)=λ2πd(Δw+w)−λ2πdw=λ2πdΔw\sin(\theta + \Delta \theta) -\sin(\theta) = \frac{\lambda}{2 \pi d}(\Delta w +w) - \frac{\lambda}{2 \pi d}w = \frac{\lambda}{2 \pi d}\Delta w sin(θ+Δθ)−sin(θ)=2πdλ(Δw+w)−2πdλw=2πdλΔw
根据导数的定义,我们有
sin(θ+Δθ)−sin(θ)Δθ=cosθ\frac{ \sin(\theta + \Delta \theta) -\sin(\theta) }{\Delta \theta}= \cos \theta Δθsin(θ+Δθ)−sin(θ)=cosθ
于是,可进一步推得
cos(θ)Δθ=λ2πdΔw\cos (\theta) \Delta \theta = \frac{\lambda}{2 \pi d}\Delta w cos(θ)Δθ=2πdλΔw
Δθ=λ2πdcos(θ)Δw=λNdcos(θ)\Delta \theta = \frac{\lambda}{2 \pi d \cos (\theta) }\Delta w=\frac{\lambda}{N d \cos (\theta) } Δθ=2πdcos(θ)λΔw=Ndcos(θ)λ
这里同样可对之前低角度范围内测角的精度(或区分度)更高的原因做出解释:cosθ\cos \thetacosθ在低角度时值更大,使得此时的 Δθ\Delta \thetaΔθ 有着更细微的取值。
如果取天线阵列间距为 λ2\frac{\lambda}{2}2λ ,且设 θ=0\theta = 0θ=0,就可以得到通常定义下的最精细的角度分辨率为
θres=2N\theta_{res} = \frac{2}{N} θres=N2
可见其将受限于能够完成多发多收的天线数量。
相关文章:
【FMCW 04】测角-Angle FFT
在之前的文章中,我们已经详尽讨论过FMCW雷达测距和测速的原理,现在来讲最后一块内容,测角。测角对于硬件设备具有要求,即要求雷达具有多发多收结构,从而形成多个空间信道(channel),我…...
Linux操作系统学习(线程同步)
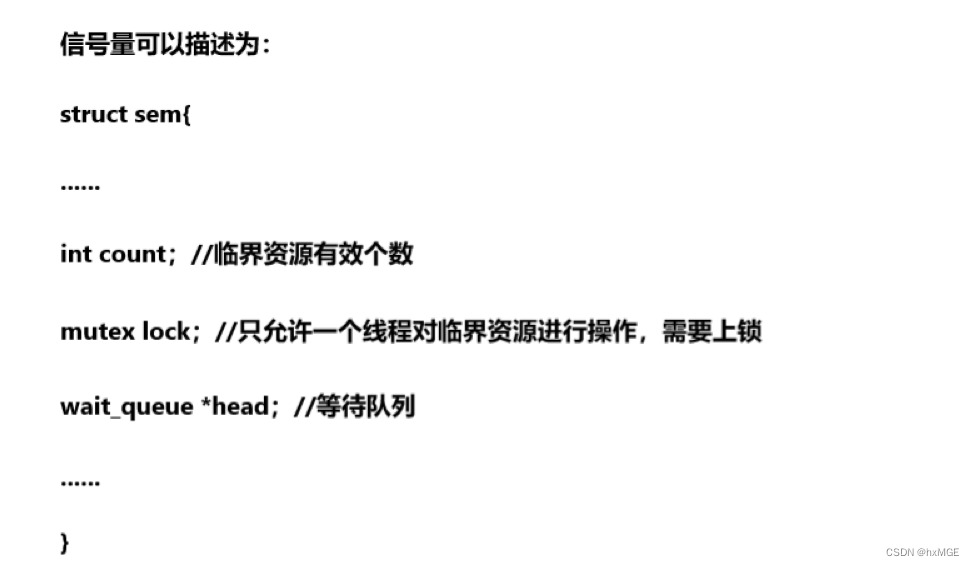
文章目录线程同步条件变量生产者与消费者模型信号量环形队列应用生产者消费者模型线程同步 现实生活中我们经常会遇到同一个资源多个人都想使用的问题,例如游乐园过山车排队,玩完的游客还想再玩,最好的办法就是玩完的游客想再玩就去重新排…...

了解动态规划算法:原理、实现和优化指南
动态规划 详细介绍例子斐波那契数列最长回文子串优化指南优化思路斐波那契数列优化最长回文子串优化详细介绍 动态规划(Dynamic Programming,简称 DP)是一种通过将原问题拆分成子问题并分别求解这些子问题来解决复杂问题的算法思想。 它通常用于求解优化问题,它的核心思想…...

《NFL橄榄球》:明尼苏达维京人·橄榄1号位
明尼苏达维京人(英语:Minnesota Vikings)是一支职业美式足球球队,位于明尼苏达州的明尼阿波利斯。他们现时在国家橄榄球联合会北区参与国家美式足球联盟比赛。该球队本为美国美式足球联盟(AFL)的球队。但是…...
sheng的学习笔记-Actuator健康监控
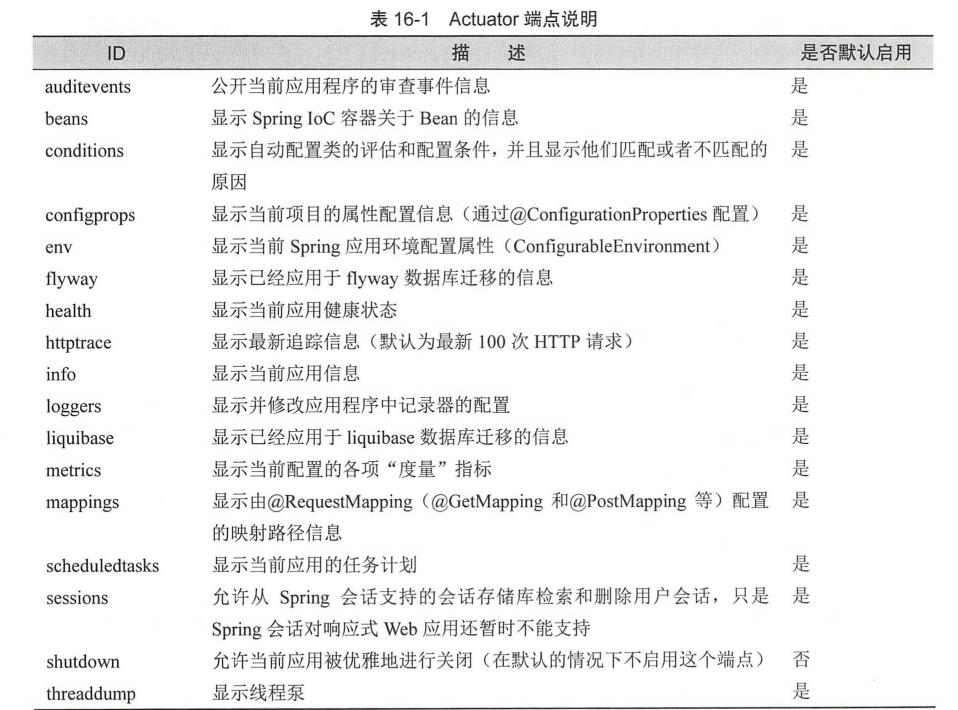
前言在微服务系统里,对微服务程序的运行状况的跟踪和监控是必不可少的;例如GPE,TelegrafinfluxDB都提供了微服务体系监控的方案, ZIPKIN, Skywalking都提供了微服务云体系的APM的方案; 这些解决方案功能全面…...

初次使用ESP32-CAM记录
模块的配置和图片 摄像头:8225N V2.0 171026 模块esp-32s 参考资料:https://docs.ai-thinker.com/esp32 配置环境 参考:https://blog.csdn.net/weixin_43794311/article/details/128622558 简单使用需要注意的地方 基本的环境配置和串口…...
)
华为OD机试真题Python实现【最长连续交替方波信号】真题+解题思路+代码(20222023)
最长连续交替方波信号 题目 输入一串方波信号,求取最长的完全连续交替方波信号,并将其输出, 如果有相同长度的交替方波信号,输出任一即可,方波信号高位用1标识,低位用0标识 如图: 说明: 一个完整的信号一定以0开始然后以0结尾, 即 010 是一个完整的信号,但101,101…...
【操作系统原理实验】页面替换策略模拟实现
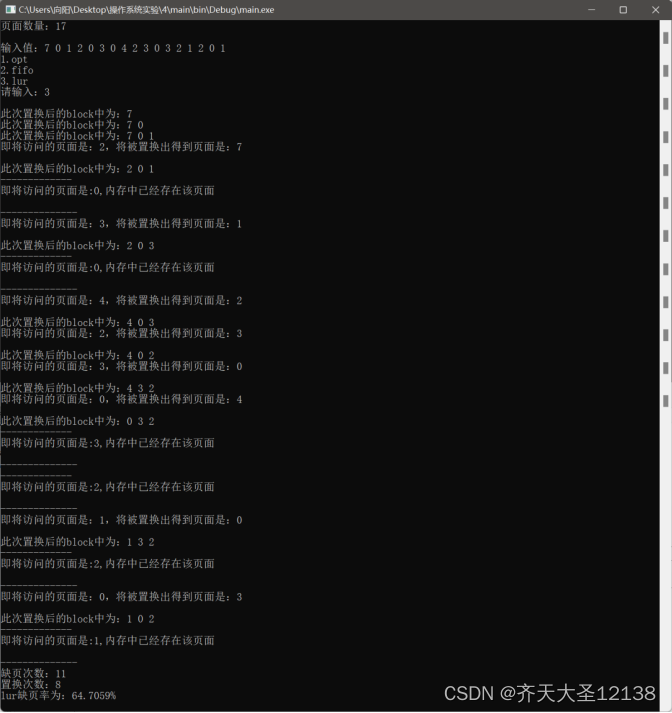
选择一种高级语言如C/C等,编写一个页面替换算法的模拟实现程序。1) 设计内存管理相关数据结构;2) 随机生成一个页面请求序列;3) 设置内存管理模拟的关键参数;4) 实现该页面置换算法;5) 模拟实现给定配置请求序列的换页…...

Java中解析XML文件
1 在Java中解析XML文件共有四种方式 A、DOM方式解析XML数据 树结构,有助于更好地理解、掌握,代码易于编写,在解析过程中树结构是保存在内存中,方便修改 B、SAX方式解析 采用事件驱动模式,对内存消耗比较小࿰…...

二点回调测买 源码
如图所示,两点回调测买点的效果图,这是我们常见的一种预测买点计算方法。 现将源码公布如下: DRAWKLINE(H,O,L,C); N:13; A1:REF(HIGH,N)HHV(HIGH,2*N1); B1:FILTER(A1,N); C1:BACKSET(B1,N1); D1:FILTER(C1,N); A2:REF(LOW,N)LLV(LOW,2*N1…...
钉钉端H5开发调试怎么搞
H5开发本地调试教程 作为一名前端开发,大家平时工作中或多或少都有接触或需要开发H5页面的场景,在开发过程中,如何像PC端页面一样有有丝滑的体验呢? 不同的情况需要在不同的端调试更方便有效: 1. 在画UI的时候,更适合在PC端调试,更改代码或者直接在浏览器调试,都是实…...
Mysql Server原理简介
Mysql客户端包括JDBC、 Navicat、sqlyog,只是为了和mysql server建立连接,向mysql server提交sql语句。mysql server组件第一部分叫连接器主要承担的功能叫管理连接和验证权限,每次在进行数据库访问的时候,必然要输入用户名和密码…...

23种设计模式-外观模式
外观模式是一种结构型设计模式,它提供了一个统一的接口,用来访问子系统中的一群接口。外观模式定义了一个高层接口,使得客户端可以更加方便地访问子系统的功能。在这篇博客中,我们将讨论如何使用Java实现外观模式,并通…...

使用 Vulkan VkImage 作为 CUDA cuArray
使用 Vulkan VkImage 作为 CUDA cuArray【问题标题】:Use Vulkan VkImage as a CUDA cuArray使用 Vulkan VkImage 作为 CUDA cuArray【发布时间】:2019-08-20 20:01:10【问题描述】:将 Vulkan VkImage 用作 CUDA cuArray 的正确方法是什么&am…...

电商API接口-电商OMS不可或缺的一块 调用代码展示
电商后台管理系统关键的一环就是实现电商平台数据的抓取,以及上下架商品、订单修改等功能的调用。这里就需要调用电商API接口。接入电商API接口后再根据自我的需求进行功能再开发,实现业务上的数字化管理。其中订单管理模板上需要用到如下API:seller_ord…...

Solaris ZFS文件系统rpool扩容
ZFS文件系统简介 Solaris10默认的文件系统是ufs(Unix Filesystem),当然也可以选装zfs;Solaris11默认的文件系统是zfs(Zettabyte Filesystem)。 ZFS文件系统的英文名称为Zettabyte File System,也叫动态文件…...

模式识别 —— 第二章 参数估计
模式识别 —— 第二章 参数估计 文章目录模式识别 —— 第二章 参数估计最大似然估计(MLE)最大后验概率估计(MAP)贝叶斯估计最大似然估计(MLE) 在语言上: 似然(likelihood…...
)
判断4位回文数-课后程序(Python程序开发案例教程-黑马程序员编著-第3章-课后作业)
实例1:判断4位回文数 所谓回文数,就是各位数字从高位到低位正序排列和从低位到高位逆序排列都是同一数值的数,例如,数字1221按正序和逆序排列都为1221,因此1221就是一个回文数;而1234的各位按倒序排列是43…...
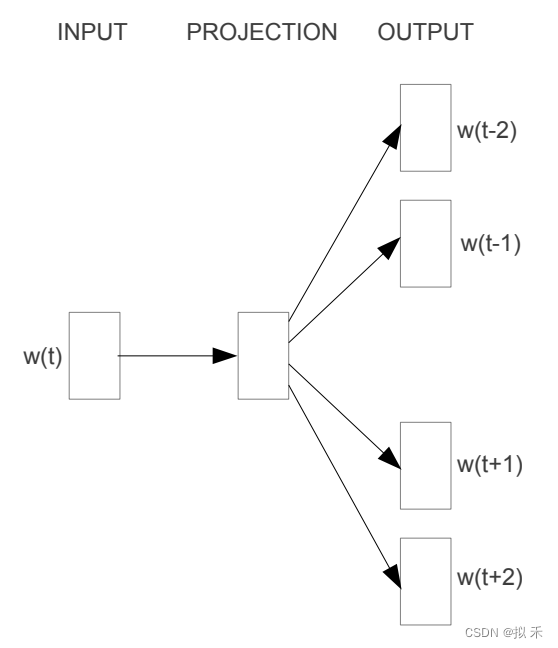
【NLP】Word2Vec 介绍
Word2Vec 是一种非常流行的自然语言处理技术,它将每个单词表示为高维向量,并且通过向量之间的相似度来表示单词之间的语义关系。 1 One-Hot 编码🍂 在自然语言处理任务中,我们需要将文本转换为计算机可以理解的形式,即…...

3月6日,30秒知全网,精选7个热点
///石家庄地铁:在指定店铺购物金额不限 就可免费乘地铁 乘客只要在指定商铺或地铁站内36524便利店购物,便能得到一张当日乘车券,可免费乘坐地铁一次,不限里程 ///神州泰岳:公司语音机器人等产品能够进行多轮问答 公司…...

XCTF-web-easyupload
试了试php,php7,pht,phtml等,都没有用 尝试.user.ini 抓包修改将.user.ini修改为jpg图片 在上传一个123.jpg 用蚁剑连接,得到flag...

CVPR 2025 MIMO: 支持视觉指代和像素grounding 的医学视觉语言模型
CVPR 2025 | MIMO:支持视觉指代和像素对齐的医学视觉语言模型 论文信息 标题:MIMO: A medical vision language model with visual referring multimodal input and pixel grounding multimodal output作者:Yanyuan Chen, Dexuan Xu, Yu Hu…...

《Qt C++ 与 OpenCV:解锁视频播放程序设计的奥秘》
引言:探索视频播放程序设计之旅 在当今数字化时代,多媒体应用已渗透到我们生活的方方面面,从日常的视频娱乐到专业的视频监控、视频会议系统,视频播放程序作为多媒体应用的核心组成部分,扮演着至关重要的角色。无论是在个人电脑、移动设备还是智能电视等平台上,用户都期望…...

2025年能源电力系统与流体力学国际会议 (EPSFD 2025)
2025年能源电力系统与流体力学国际会议(EPSFD 2025)将于本年度在美丽的杭州盛大召开。作为全球能源、电力系统以及流体力学领域的顶级盛会,EPSFD 2025旨在为来自世界各地的科学家、工程师和研究人员提供一个展示最新研究成果、分享实践经验及…...
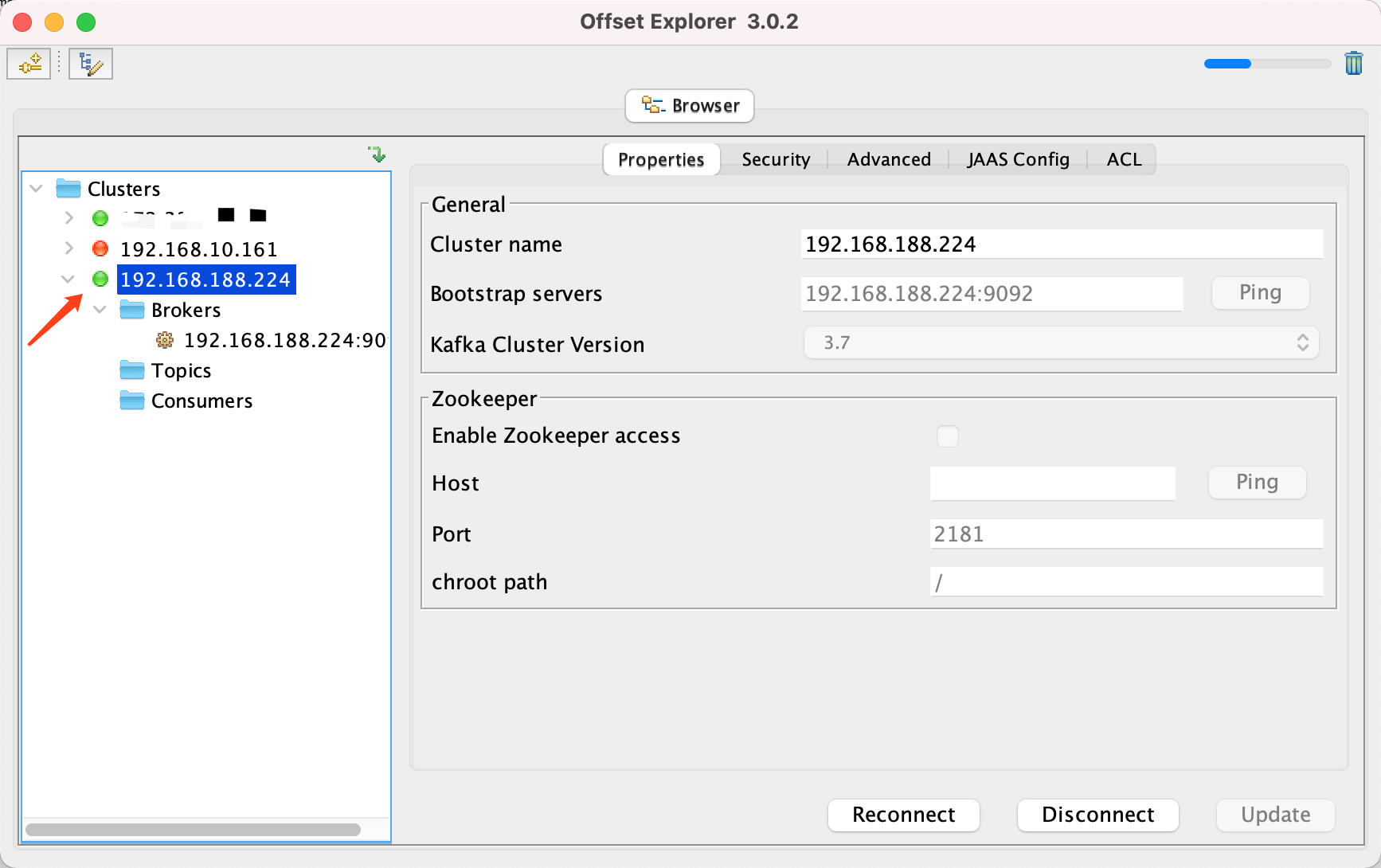
Docker 运行 Kafka 带 SASL 认证教程
Docker 运行 Kafka 带 SASL 认证教程 Docker 运行 Kafka 带 SASL 认证教程一、说明二、环境准备三、编写 Docker Compose 和 jaas文件docker-compose.yml代码说明:server_jaas.conf 四、启动服务五、验证服务六、连接kafka服务七、总结 Docker 运行 Kafka 带 SASL 认…...

什么是库存周转?如何用进销存系统提高库存周转率?
你可能听说过这样一句话: “利润不是赚出来的,是管出来的。” 尤其是在制造业、批发零售、电商这类“货堆成山”的行业,很多企业看着销售不错,账上却没钱、利润也不见了,一翻库存才发现: 一堆卖不动的旧货…...

基于数字孪生的水厂可视化平台建设:架构与实践
分享大纲: 1、数字孪生水厂可视化平台建设背景 2、数字孪生水厂可视化平台建设架构 3、数字孪生水厂可视化平台建设成效 近几年,数字孪生水厂的建设开展的如火如荼。作为提升水厂管理效率、优化资源的调度手段,基于数字孪生的水厂可视化平台的…...
《通信之道——从微积分到 5G》读书总结
第1章 绪 论 1.1 这是一本什么样的书 通信技术,说到底就是数学。 那些最基础、最本质的部分。 1.2 什么是通信 通信 发送方 接收方 承载信息的信号 解调出其中承载的信息 信息在发送方那里被加工成信号(调制) 把信息从信号中抽取出来&am…...
React19源码系列之 事件插件系统
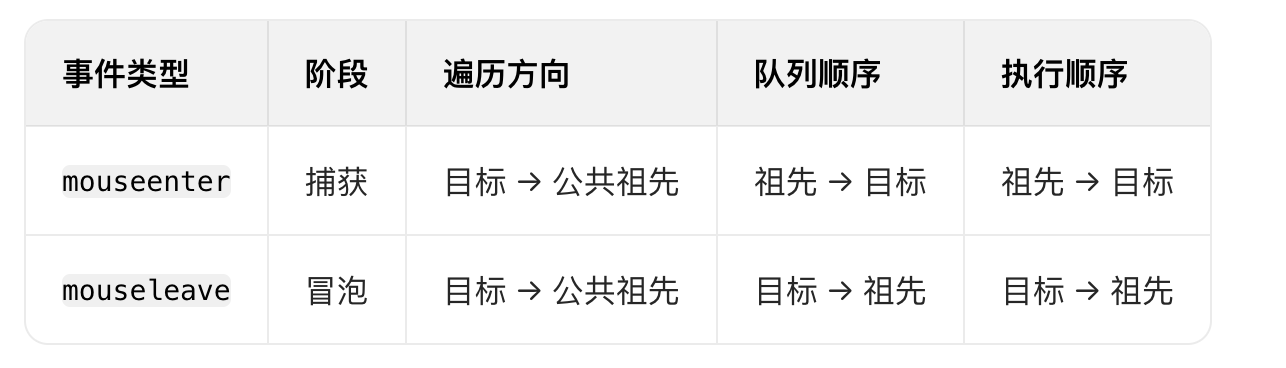
事件类别 事件类型 定义 文档 Event Event 接口表示在 EventTarget 上出现的事件。 Event - Web API | MDN UIEvent UIEvent 接口表示简单的用户界面事件。 UIEvent - Web API | MDN KeyboardEvent KeyboardEvent 对象描述了用户与键盘的交互。 KeyboardEvent - Web…...

LLM基础1_语言模型如何处理文本
基于GitHub项目:https://github.com/datawhalechina/llms-from-scratch-cn 工具介绍 tiktoken:OpenAI开发的专业"分词器" torch:Facebook开发的强力计算引擎,相当于超级计算器 理解词嵌入:给词语画"…...