汽车电子行业知识:自动驾驶系统结构和各模块功能
文章目录
- 2.自动驾驶系统结构和各模块功能
- 2.1.自动驾驶系统结构
- 2.2.车载传感器
- 2.2.1.激光雷达
- 2.2.2.毫米波雷达
- 2.2.3.超声波雷达
- 2.2.4.摄像头
- 2.2.5.GNSS
- 2.2.6. IMU
- 2.2.7.多传感器融合
- 2.3.各功能模块
- 2.3.1.高精度地图
- 2.3.2.定位
- 2.3.3.感知
- 2.3.4.决策
- 2.3.5.规划
- 2.3.6.控制
- 2.3.7.V2X
- 2.3.8.高性能车载集成计算平台
- 2.3.9.智能车载操作系统
- 2.3.10.车载总线控制系统
2.自动驾驶系统结构和各模块功能
2.1.自动驾驶系统结构

2.2.车载传感器

2.2.1.激光雷达
【定义】:激光雷达又称光学雷达(LiDAR,Light Detection And Ranging),是一种先进的光学遥感技术。
【原理】:向物体发射激光,根据接收反射时间间隔确定目标物体实际距离。
【作用】:激光雷达可以用于测量物体距离和表面形状。其测量精度可达厘米级。主流的多线激光雷达有4线、8线、16线、32线和64线。
【优点】:具有较高的距离、角度、速度分辨率,抗干扰能力强,点云信息丰富,不易受光照条件影响,可用于全天工作。
【缺点】:激光雷达会受天气(雨天,雾天)影响,空气中的悬浮物对光速产生影响,从而影响测量结果精度。
2.2.2.毫米波雷达
【定义】:毫米波就是电磁波,其频率通常介于10~300GHz频域之间。
【原理】:雷达通过发射无线电信号并接收反射信号来测定车辆与物体间的距离,毫米波雷达的测距和测速原理都是基于多普勒效应。
【作用】:被广泛应用于车载距离探测,如自适应巡航、碰撞预警、盲区探测、自动紧急制动等。
【优点】:与厘米波导引头相比,毫米波导引头体积小、质量轻、空间分辨率高;与红外、激光、电视等光学导引头相比,毫米波导引头穿透雾、烟、灰尘的能力强;另外,毫米波导引头的抗干扰性能也优于其他微波导引头。毫米波雷达具有全天候,全天时的工作特性,且探测距离远,探测精度高。
【缺点】:无法检测上过漆的塑料或者木头。对金属表面敏感,一个弯曲的金属表面会被认为是一个很大的金属面,因此路上的小易拉罐可能会被认为是很大的障碍,在大桥和隧道表现不佳。
2.2.3.超声波雷达
【定义】:超声波雷达,发射并接收40kHz的超声波。
【原理】:发射接收超声波,根据时间差算出障碍物距离。
【作用】:常见的超声波雷达有两种:第一种是安装在汽车前后保险杠上的倒车雷达,称为超声波驻车辅助传感器(UPA);第二种是安装在汽车侧面,称为自动泊车辅助传感器(APA)。其测距精度大约是1-3厘米左右。
【优点】:超声波雷达抗环境干扰能力强,对天气变化不敏感。
【缺点】:超声波是一种机械波,使得超声波雷达有着根源性的局限性:对温度敏感。超声波散射角大,方向性较差,无法精确描述障碍物位置。
2.2.4.摄像头
【定义】:一般具有视频摄像/传播和静态图像捕捉等基本功能,它是借由镜头采集图像后,由摄像头内的感光组件电路及控制组件对图像进行处理并转换成电脑所能识别的数字信号,然后借由并行端口或USB连接输入到电脑后由软件再进行图像还原。
【原理】:单目摄像头主要基于机器学习,对图像数据进行训练和学习。双目摄像头基于视差原理测量驾驶环境,测距精度较高。
【作用】:车载摄像头分为单目和双目,用于环境感知。
【优点】:摄像头的感知图像信息覆盖内容丰富,成本较低。
【缺点】:受光线,天气影响大
2.2.5.GNSS
【定义】:卫星导航定位系统是星基无线电导航系统,以人造地球卫星作为导航台,为全球海陆空的各类军民载体提供全天候的、高精度的位置、速度和时间信息。目前世界上著名的卫星导航系统有美国的全球定位系统(GPS)、俄罗斯的全球导航卫星系统(GLONASS)、中国的北斗卫星导航系统(BDS)以及欧盟伽利略(Galileo)系统。
【原理】:GNSS的基本原理是测量出已知位置的卫星到用户接收机之间的距离,综合多颗卫星的数据就可知道接收机的具体位置。
【作用】:对目标物体进行定位,提供经纬度,速度,方向等信息。
【优点】:全天候定位,高精度的位置、速度和时间信息。
【缺点】:多路径效应,数据更新频率低,不能在隧道或者室内定位。
2.2.6. IMU
【定义】:检测和测量加速度与旋转运动的传感器,包括加速度计和角速度计。
【原理】:加速度计工作原理是惯性原理,也就是力的平衡,A(加速度)=F(惯性力)/M(质量)。角速度计工作原理是利用了角动量守恒原理。
【作用】:加速度计测量目标物体的加速度,根据牛二定律可以求出目标物体的俯仰角,加速度二次积分可以计算目标物体的速度,但是这个速度并不准确。角速度计测量目标物体的角速度,角速度积分后可以计算车辆方向。
【优点】:数据更新频率快,不受外部环境影响。
【缺点】:有累计误差。
2.2.7.多传感器融合
由于各个传感器都有局限性且实现的功能不同,难以互相替代,需要多个传感器之间取长补短,来提升定位的正确率和精确度,于是诞生了多传感器融合。多传感器融合方案将会在定位模块介绍。感知模块也有自己的融合方案。定位的多传感器融合主要是提升定位正确率和精度,感知模块的多传感器融合提升感知识别结果正确率。
2.3.各功能模块
2.3.1.高精度地图
【定义】:高精度地图由含有语义信息的车道模型,道路部件,道路属性等矢量信息,以及用于多传感器定位的特征图层构成。 高精度地图可以看作是一种特殊的传感器。
【作用】:在高精度地图辅助下更容易判定自车位置,可行使区域,目标类型,行驶方向等。
定位,感知及规划都依赖高精度地图。
2.3.2.定位
计算车辆经纬度,速度,方向,俯仰角等信息,解决“我在哪的问题”。
定位通常使用GNSS,航位推算经过kalman融合的方式计算车辆绝对位置,但是这个位置的精度对于自动驾驶来说还远远不够。可以使用激光雷达点云和高精度地图匹配的算法进一步提升位置精确度,通常使用ICP迭代最近点方法。使用视觉定位算法有两类:基于地标拓扑算法和基于几何的视觉里程算法。

2.3.3.感知
感知相当于自动驾驶的“眼睛”,解决“周边环境是什么”问题。感知主要包括三个方面,路面、静态物体和动态物体。对于动态物体,不仅要检测到物体的位置,而且要对其轨迹进行跟踪,并根据跟踪结果,预测物体下一步的位置。感知算法大部分采用深度学习卷积神经网络,图像识别技术等。
2.3.4.决策
决策相当于自动驾驶的“大脑”,解决“我该做什么”问题。决策有两大类算法,一类是基于规则的学习,一类是基于学习算法。基于规则的决策:根据驾驶规则,经验,知识,交通法规等建立的规则库,根据不同环境信息划分车辆状态,按照规则逻辑确定车辆行为,代表方法是有限状态机法。基于学习的决策:通过环境样本进行自主学习,由数据驱动建立行为规则,利用不同的学习方法和网络结构,根据不同的环境信息直接进行行为匹配,输出决策行为,代表方法是深度学习及决策树等。
2.3.5.规划
在一定约束条件下,完成某个区域或范围内时间、空间状态下的路径、速度优化,或称之为车辆在一定时间、空间内的行驶轨迹优化。其中,得到的轨迹包含了时间、车辆姿态、位置等各方面信息,具体而言,即为车辆到达每个位置时的时间、该位置上的行驶速度,以及加速度、曲率、曲率的高阶导数等以及其他与时间相关的运动变量信息。
2.3.6.控制
这是一个直接和自动驾驶车辆底层控制接口CAN-BUS对接的模块,其核心任务是消化上层运动规划模块的输出轨迹点,通过一系列结合车身属性和外界物理因素的动力学计算,转换成对车辆控制的油门、刹车,以及方向盘信号,从而尽可能地控制车辆去实际执行这些轨迹点。
2.3.7.V2X
V2X相当于自动驾驶的“耳朵”。车用无线通信技术(Vehicle to Everything, V2X)是将车辆与一切事物相连接的新一代信息通信技术,其中V代表车辆,X代表任何与车交互信息的对象,当前X主要包含车、人、交通路侧基础设施和网络。借助于人、车、路、云平台之间的全方位连接和高效信息交互,V2X目前正从信息服务类应用向交通安全和效率类应用发展,并将逐步向支持实现自动驾驶的协同服务类应用演进。
2.3.8.高性能车载集成计算平台
自动驾驶系统各模块实时运行过程中,会产生大量的数据。以感知传感器为代表,数据量大,实时性要求高。因此,需要选择强劲性能的计算平台完成实时大规模数据处理任务。计算平台的性能对自动驾驶的安全性、可靠性、实时性非常重要。目前主流的计算平台包括基于GPU、DSP、FPGA、ASIC等方案的计算平台。
2.3.9.智能车载操作系统
运营服务,内容服务,人机交互,为乘客提供个性化服务。车载操作系统如下:

2.3.10.车载总线控制系统
汽车总线是指汽车内部导线采用总线控制的一种技术,通常称为汽车总线或汽车总线技术。汽车总线包括LIN总线,CAN总线,CANFD总线,MOST总线。线控技术主要指车辆底盘的线控执行,包括线控制动、转向和油门。
参考:https://www.zhihu.com/people/bai-gong-zi-72-22/posts
相关文章:
汽车电子行业知识:自动驾驶系统结构和各模块功能
文章目录 2.自动驾驶系统结构和各模块功能2.1.自动驾驶系统结构2.2.车载传感器2.2.1.激光雷达2.2.2.毫米波雷达2.2.3.超声波雷达2.2.4.摄像头2.2.5.GNSS2.2.6. IMU2.2.7.多传感器融合 2.3.各功能模块2.3.1.高精度地图2.3.2.定位2.3.3.感知2.3.4.决策2.3.5.规划2.3.6.控制2.3.7.…...
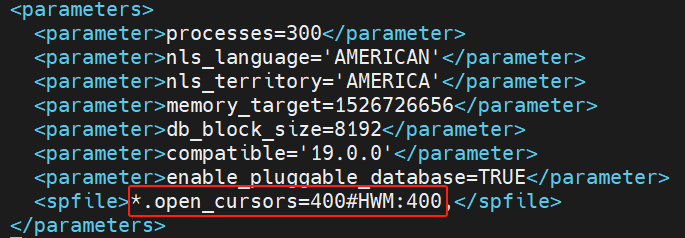
Oracle参数文件详解
1、参数文件的作用 参数文件用于存放实例所需要的初始化参数,因为多数初始化参数都具有默认值,所以参数文件实际存放了非默认的初始化参数。 2、参数文件类型 1)服务端参数文件,又称为 spfile 二进制的文件,命名规则…...

鸿蒙(HarmonyOS)Navigation如何实现多场景UI适配?
场景介绍 应用在不同屏幕大小的设备上运行时,往往有不同的UI适配,以聊天应用举例: 在窄屏设备上,联系人和聊天区在多窗口中体现。在宽屏设备上,联系人和聊天区在同一窗口体现。 要做好适配,往往需要开发…...

PTGui图像拼接实验
1 PTGui图像拼接实验 1.1 概述 图像拼接技术就是将数张有重叠部分的图像(可能是不同时间、不同视角或者不同传感器获得的)拼成一幅无缝的全景图或高分辨率图像的技术 图像配准(image alignment)和图像融合是图像拼接的两个关键…...

C++|类封装、类的分文件编写练习:设计立方体类、点和圆的关系
文章目录 练习案例1:设计立方体类CPP代码 练习案例2:点和圆的关系CPP代码 代码总结类的分文件编写 练习案例1:设计立方体类 设计立方体类(Cube) 求出立方体的面积和体积 分别用全局函数和成员函数判断两个立方体是否相等。 CPP代码 class Cube { pub…...

大数据开发扩展shell--尚硅谷shell笔记
大数据开发扩展shell 学习目标 1 熟悉shell脚本的原理和使用 2 熟悉shell的编程语法 第一节 Shell概述 1)Linux提供的Shell解析器有: 查看系统中可用的 shell [atguiguhadoop101 ~]$ cat /etc/shells /bin/sh/bin/bash/sbin/nologin/bin/dash/bin/t…...
考研数学|《1800》《1000》《880》《660》最佳搭配使用方法
直接说结论:基础不好先做1800、强化之前660,强化可选880/1000题。 首先,传统习题册存在的一个问题是题量较大,但难度波动较大。《汤家凤1800》和《张宇1000》题量庞大,但有些题目难度不够平衡,有些过于简单…...
)
【GameFramework框架内置模块】17、声音(Sound)
推荐阅读 CSDN主页GitHub开源地址Unity3D插件分享简书地址QQ群:398291828大家好,我是佛系工程师☆恬静的小魔龙☆,不定时更新Unity开发技巧,觉得有用记得一键三连哦。 一、前言 【GameFramework框架】系列教程目录: https://blog.csdn.net/q764424567/article/details/1…...

视频记录历史播放位置效果
简介 每次打开页面视频从上一次的播放位置开始播放 利用lodash库做节流 代码 <!DOCTYPE html> <html lang"en"><head><meta charset"UTF-8"><meta name"viewport" content"widthdevice-width, initial-sca…...

Request Response
简介 Request(请求) & Response(响应) 浏览器会向服务器发送请求数据,服务器也需要返回响应数据给浏览器,因此我们需要设置对应的类来代表请求数据和响应数据,且Servlet中的service方法就需…...

How to convert .py to .ipynb in Ubuntu 22.04
How to convert .py to .ipynb in Ubuntu 22.04 jupyter nbconvertp2j 最近看到大家在用jupyter notebook,我也试了一下,感觉还不错,不过,也遇到了一些问题,比方说,我有堆的.py文件,如果要一个一…...

【prometheus-operator】k8s监控集群外redis
1、部署exporter GitHub - oliver006/redis_exporter: Prometheus Exporter for Redis Metrics. Supports Redis 2.x, 3.x, 4.x, 5.x, 6.x, and 7.x redis_exporter-v1.57.0.linux-386.tar.gz # 解压 tar -zxvf redis_exporter-v1.57.0.linux-386.tar.gz # 启动 nohup ./redi…...
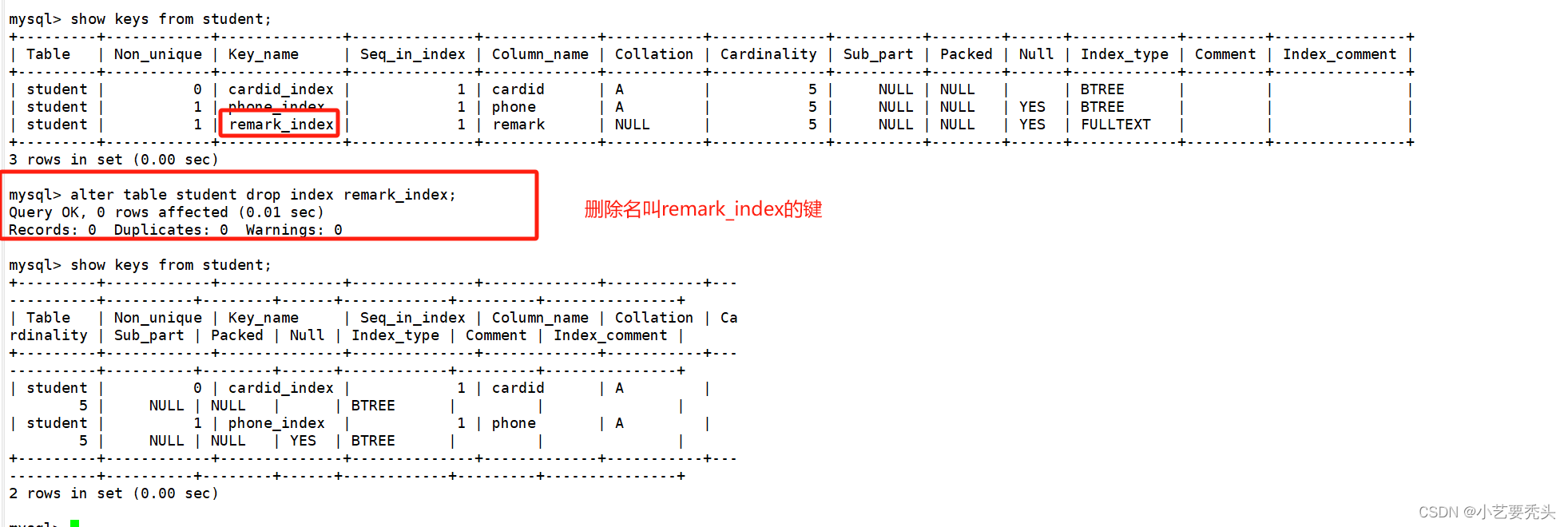
MySQL索引(图文并茂)
目录 一、索引的概念 二、索引的作用 三、创建索引的原则依据 四、索引的分类和创建 1、索引的分类 2、索引的创建 2.1 普通索引 2.1.1 直接创建索引 2.1.2 修改表方式创建 2.1.3 创建表的时候指定索引 2.2 唯一索引 2.2.1 直接创建唯一索引 2.2.2 修改表方式创建 …...
Redis 教程系列之Redis PHP 使用 Redis(十二)
PHP 使用 Redis 安装 开始在 PHP 中使用 Redis 前, 我们需要确保已经安装了 redis 服务及 PHP redis 驱动,且你的机器上能正常使用 PHP。 接下来让我们安装 PHP redis 驱动:下载地址为:https://github.com/phpredis/phpredis/releases。 P…...

JavaScript语法和数据类型
基础 JavaScript 借鉴了 Java 的大部分语法,但同时也受到 Awk、Perl 和 Python 的影响。 JavaScript 是区分大小写的,并使用 Unicode 字符集。举个例子,可以将单词 Frh(在德语中意思是“早”)用作变量名。 var Frh …...

解决华为云服务器宝塔面板无法访问显示“此站点的连接不安全”问题
已经配置好安全组以及初始化宝塔面板,还是无法访问镜像管理页面,提示此站点的连接不安全。 解决方案 将地址https改为http即可进入。 成功登录后,开启面板SSL即可。...

【Python】 Python脚本实现某平台视频流下载
亲爱的玛丽 我会想念着你 我是多么的讨厌分离 加油站旁的海鸥 机场路上的松柏 挥挥手眼泪就落下来 我多想和那些光阴永远住下来 我不能 我不能 🎵 赵雷《玛丽》 在视频内容的分发上,m3u8格式的视频流越来越常见。它将视频切分成多个…...

LangChain核心模块 Model I/O——Prompts
Prompts 语言模型的提示是用户提供的一组指令或输入,用于指导模型的响应,帮助模型理解上下文并生成相关且连贯的基于语言的输出,例如回答问题、完成句子或参与某项活动。对话。 关键问题 如何在LLMs中使用少量示例(few-shot examples)—…...

关于Docker守护程序未运行导致的错误
01 在启动Docker之前,确保你已经安装了Docker并且Docker服务是运行的。以下是一些步骤可以帮助你解决这个问题: 首先,确保Docker已经正确安装在你的系统上。你可以通过运行以下命令来检查Docker是否已安装: docker --version如果…...

Unity中关于SendMessage方法
在Unity中,SendMessage 方法用于在游戏对象及其所有子对象上调用指定名称的方法。这种方法可以用于在不需要知道接收方的确切类型的情况下,向游戏对象发送消息。 基本语法如下: void SendMessage(string methodName, object value null, S…...

【Linux】shell脚本忽略错误继续执行
在 shell 脚本中,可以使用 set -e 命令来设置脚本在遇到错误时退出执行。如果你希望脚本忽略错误并继续执行,可以在脚本开头添加 set e 命令来取消该设置。 举例1 #!/bin/bash# 取消 set -e 的设置 set e# 执行命令,并忽略错误 rm somefile…...
)
椭圆曲线密码学(ECC)
一、ECC算法概述 椭圆曲线密码学(Elliptic Curve Cryptography)是基于椭圆曲线数学理论的公钥密码系统,由Neal Koblitz和Victor Miller在1985年独立提出。相比RSA,ECC在相同安全强度下密钥更短(256位ECC ≈ 3072位RSA…...

【ROS】Nav2源码之nav2_behavior_tree-行为树节点列表
1、行为树节点分类 在 Nav2(Navigation2)的行为树框架中,行为树节点插件按照功能分为 Action(动作节点)、Condition(条件节点)、Control(控制节点) 和 Decorator(装饰节点) 四类。 1.1 动作节点 Action 执行具体的机器人操作或任务,直接与硬件、传感器或外部系统…...

【SQL学习笔记1】增删改查+多表连接全解析(内附SQL免费在线练习工具)
可以使用Sqliteviz这个网站免费编写sql语句,它能够让用户直接在浏览器内练习SQL的语法,不需要安装任何软件。 链接如下: sqliteviz 注意: 在转写SQL语法时,关键字之间有一个特定的顺序,这个顺序会影响到…...

Python如何给视频添加音频和字幕
在Python中,给视频添加音频和字幕可以使用电影文件处理库MoviePy和字幕处理库Subtitles。下面将详细介绍如何使用这些库来实现视频的音频和字幕添加,包括必要的代码示例和详细解释。 环境准备 在开始之前,需要安装以下Python库:…...
前端开发面试题总结-JavaScript篇(一)
文章目录 JavaScript高频问答一、作用域与闭包1.什么是闭包(Closure)?闭包有什么应用场景和潜在问题?2.解释 JavaScript 的作用域链(Scope Chain) 二、原型与继承3.原型链是什么?如何实现继承&a…...

AspectJ 在 Android 中的完整使用指南
一、环境配置(Gradle 7.0 适配) 1. 项目级 build.gradle // 注意:沪江插件已停更,推荐官方兼容方案 buildscript {dependencies {classpath org.aspectj:aspectjtools:1.9.9.1 // AspectJ 工具} } 2. 模块级 build.gradle plu…...

Vue ③-生命周期 || 脚手架
生命周期 思考:什么时候可以发送初始化渲染请求?(越早越好) 什么时候可以开始操作dom?(至少dom得渲染出来) Vue生命周期: 一个Vue实例从 创建 到 销毁 的整个过程。 生命周期四个…...

go 里面的指针
指针 在 Go 中,指针(pointer)是一个变量的内存地址,就像 C 语言那样: a : 10 p : &a // p 是一个指向 a 的指针 fmt.Println(*p) // 输出 10,通过指针解引用• &a 表示获取变量 a 的地址 p 表示…...
一些实用的chrome扩展0x01
简介 浏览器扩展程序有助于自动化任务、查找隐藏的漏洞、隐藏自身痕迹。以下列出了一些必备扩展程序,无论是测试应用程序、搜寻漏洞还是收集情报,它们都能提升工作流程。 FoxyProxy 代理管理工具,此扩展简化了使用代理(如 Burp…...