学习使用xbox手柄控制小乌龟节点移动
使用xbox手柄控制小乌龟,首先要下载joy功能包,发布sensor_msgs话题也就是手柄和ros通信的话题。
下载的步骤就根据官方文档即可
joy/Tutorials/ConfiguringALinuxJoystick - ROS Wiki
这里我提供一下具体步骤
第一步 安装joy
首先安装对应系统版本的joy
sudo apt-get install ros-noetic-joy连接号手柄查看手柄的接口
ls /dev/input/查看情况如下

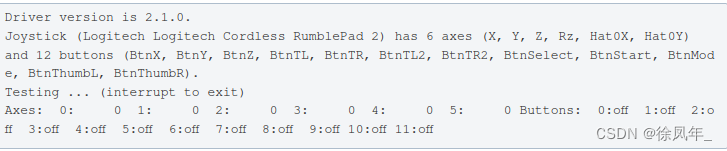
其中的jsX,这里是js0就是手柄的接口,接着使用如下命令查看手柄是否有数据,jsX改为对应的js0。
sudo jstest /dev/input/js0你将看到如下情况,移动手柄按钮摇杆看到数据变化,即初步成功
现在我在将他连接到ros节点上,列出手柄权限
ls -l /dev/input/jsX输出如下
![]()
如果XX为rw,则配置正确
如果XX为--,则没有配置正确你需要,给他权限
(在这里我自己是复杂的所以我选择直接执行的chmod)
sudo chmod a+rw /dev/input/jsX如上操作后就已经成功了,让我们启动joy节点验证一下,首先,让我们告诉joy节点要使用的操纵杆设备默认为js0
roscore
rosparam set joy_node/dev "/dev/input/js0"现在就可以启动joy了
rosrun joy joy_node如果一切正常,你将会看到

如果你和我一样执行的chmod,有可能会看到

不用担心也是可以正常使用的!
启动节点后打印查看具体话题发布的信息
rostopic echo joy移动按键观察有输出即证明安装好了。
第二步 使用手柄控制小乌龟
以下控制程序皆来源于合工大机器人实验室博主,我只是作为一个记录,和一点程序完善
原文链接:https://blog.csdn.net/qq_34935373/article/details/87905784
要想使用手柄控制小乌龟节点运动,我们要知道
想让手柄/joy_node节点控制/turtlesim_node节点,必须创建一个节点,一边接受/joy_node节点发布的/sensor_msgs/Joy的话题消息,一边再通过话题/turtle1/cmd_vel发布消息给/turtlesim_node。这个节点就得完场消息数据的转换。
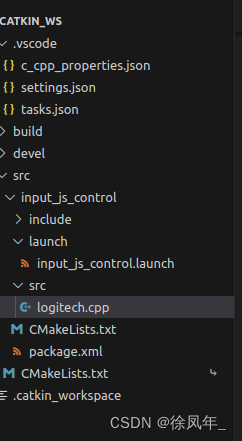
建立一个工作空间,建一个功能包input_js_control ,设置依赖为roscpp rospy std_msgs,如上,在功能包input_js_control 的src下建立用于实现订阅joy和发布给cmd_vel的cpp文件logitech.cpp,实现代码如下:
#include<ros/ros.h>#include<geometry_msgs/Twist.h>#include <sensor_msgs/Joy.h>#include<iostream>using namespace std;class Teleop{public:Teleop();private:/* data */void callback(const sensor_msgs::Joy::ConstPtr& Joy);ros::NodeHandle n; //实例化节点ros::Subscriber sub ;ros::Publisher pub ;double vlinear,vangular;//我们控制乌龟的速度,是通过这两个变量调整int axis_ang,axis_lin; //axes[]的键};Teleop::Teleop(){//我们将这几个变量加上参数,可以在参数服务器方便修改n.param<int>("axis_linear",axis_lin,1); //默认axes[1]接收速度n.param<int>("axis_angular",axis_ang,0);//默认axes[0]接收角度n.param<double>("vel_linear",vlinear,1);//默认线速度1 m/sn.param<double>("vel_angular",vangular,1);//默认角速度1 单位rad/spub = n.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel",1);//将速度发给乌龟sub = n.subscribe<sensor_msgs::Joy>("joy",10,&Teleop::callback,this);//订阅游戏手柄发来的数据} void Teleop::callback(const sensor_msgs::Joy::ConstPtr& Joy){geometry_msgs::Twist v;v.linear.x =Joy->axes[axis_lin]*vlinear; //将游戏手柄的数据乘以你想要的速度,然后发给乌龟v.angular.z =Joy->axes[axis_ang]*vangular;ROS_INFO("linear:%.3lf angular:%.3lf",v.linear.x,v.angular.z);pub.publish(v);}int main(int argc,char** argv){ros::init(argc, argv, "joy_to_turtle");Teleop teleop_turtle;ros::spin();return 0;}在创建launch文件夹创一个launch文件input_js_control.launch集合启动所有节点:
以下是我对这个launch文件的理解和改善过的代码:
<launch><!-- roslaunch已经启动roscore --><!-- 相当于rosrun turtlesim turtlesim_node --><node pkg="turtlesim" type="turtlesim_node" name="turtlesim_node"></node><!-- 相当于rosrun input_js_control logitech --><node pkg="input_js_control" type="logitech" name="joy_to_turtle" output="screen"> </node><!--input axis 4,3代表右摇杆 1,0代表左摇杆 2代表左扳机 --><param name="axis_linear" value="1" type="int"/><param name="axis_angular" value="0" type="int"/><!--input vel 2,1.5 --><param name="vel_linear" value="1" type="double"/><param name="vel_angular" value="1" type="double"/><!-- 相当于rosrun joy joy_node --><node respawn="true" pkg="joy" type="joy_node" name="joystick" > </node></launch>
另外编译之前要配置package.xml文件和CMakeLists.txt文件
对package.xml文件:
<buildtool_depend>catkin</buildtool_depend><build_depend>roscpp</build_depend><build_depend>rospy</build_depend><build_depend>std_msgs</build_depend><build_depend>geometry_msgs</build_depend><build_depend>sensor_msgs</build_depend><build_export_depend>roscpp</build_export_depend><build_export_depend>rospy</build_export_depend><build_export_depend>geometry_msgs</build_export_depend><build_export_depend>std_msgs</build_export_depend><build_export_depend>sensor_msgs</build_export_depend><exec_depend>roscpp</exec_depend><exec_depend>rospy</exec_depend><exec_depend>std_msgs</exec_depend><exec_depend>message_runtime</exec_depend>对CMakeLists.txt文件:
cmake_minimum_required(VERSION 3.0.2)
project(input_js_control)find_package(catkin REQUIRED COMPONENTSroscpprospystd_msgsgeometry_msgssensor_msgs
)catkin_package(CATKIN_DEPENDS roscpp rospy std_msgs geometry_msgs sensor_msgs
)include_directories(${catkin_INCLUDE_DIRS}
)add_executable(logitech src/logitech.cpp)add_dependencies(logitech ${${PROJECT_NAME}_EXPORTED_TARGETS}${catkin_EXPORTED_TARGETS})target_link_libraries(logitech${catkin_LIBRARIES}
)
配置完成后编译,catkin_make之后运行launch文件即可使用左摇杆控制小乌龟移动!
相关文章:
学习使用xbox手柄控制小乌龟节点移动
使用xbox手柄控制小乌龟,首先要下载joy功能包,发布sensor_msgs话题也就是手柄和ros通信的话题。 下载的步骤就根据官方文档即可 joy/Tutorials/ConfiguringALinuxJoystick - ROS Wiki 这里我提供一下具体步骤 第一步 安装joy 首先安装对应系统版本的…...

OpenLayers6实战,OpenLayers绘制特殊图形,OpenLayers绘制四角形(菱形),OpenLayers绘制菱形
专栏目录: OpenLayers实战进阶专栏目录 前言 本章讲解如何使用OpenLayers6实现绘制特殊图形,以绘制四角形(菱形),OpenLayers绘制菱形的功能为例。 本章核心代码不依赖任何第三方插件,只依赖OpenLayers。 需要注意的是两个操作按钮需要引入ElementUI 二、依赖和使用 &q…...

虚拟机如何在原有磁盘上扩容
虚拟机未开启状态–菜单栏–虚拟机–快照–拍摄快照–拍摄快照– 菜单栏–虚拟机–快照–快照管理器–点击刚刚的快照1–删除–是– 文件–新建或者打开–硬盘(以本人Win 10.64.3GL为例)–虚拟机设置–硬件– 硬盘(SATA)–磁盘实…...
2024-03-27 作业
作业要求: 整理课上代码整理思维导图完成下面类 作业1: 完成了 作业2: 作业3: class myString {private:char *str; //记录c风格的字符串int size; //记录字符串的实际长度public://无参构造myString():si…...

C语言二叉树和堆(个人笔记)
二叉树和堆 二叉树1二叉树的概念和结构1.1特殊的二叉树1.2二叉树的性质(规定根节点的层数为1)1.3二叉树的存储结构 2.二叉树的顺序结构和实现2.1二叉树的顺序结构2.2堆的概念和结构2.3堆的实现2.4堆的应用2.4.1堆排序 2.5TOP-K问题 3.二叉树的遍历4.二叉…...
重学SpringBoot3-Profiles介绍
更多SpringBoot3内容请关注我的专栏:《SpringBoot3》 期待您的点赞👍收藏⭐评论✍ 重学SpringBoot3-Profiles介绍 Profiles简介如何在Spring Boot中使用Profiles定义Profiles激活ProfilesIDEA设置active profile使用Profile-specific配置文件 条件化Bean…...
Transformer 论文阅读笔记
文章目录 前言论文阅读研究现状工作内容模型架构训练过程实验结果模型代码 其他评价 前言 Transformer可以说是深度学习领域最重要的,里程碑式的工作之一,发表于2017年的NIPS。该模型开创了自MLP(多层感知机)、CNN(卷…...

Vue 3中ref和reactive的区别
🤍 前端开发工程师、技术日更博主、已过CET6 🍨 阿珊和她的猫_CSDN博客专家、23年度博客之星前端领域TOP1 🕠 牛客高级专题作者、打造专栏《前端面试必备》 、《2024面试高频手撕题》 🍚 蓝桥云课签约作者、上架课程《Vue.js 和 E…...
oracle19c adg搭建
一、环境搭建 主机IPora19192.168.232.111ora19std192.168.232.112 本文结合:https://blog.csdn.net/weixin_63131036/article/details/136635553 1.配置网络yum源 1.删除redhat7.0系统自带的yum软件包; rpm -qa|grep yum >oldyum.pkg 备份原信息 …...
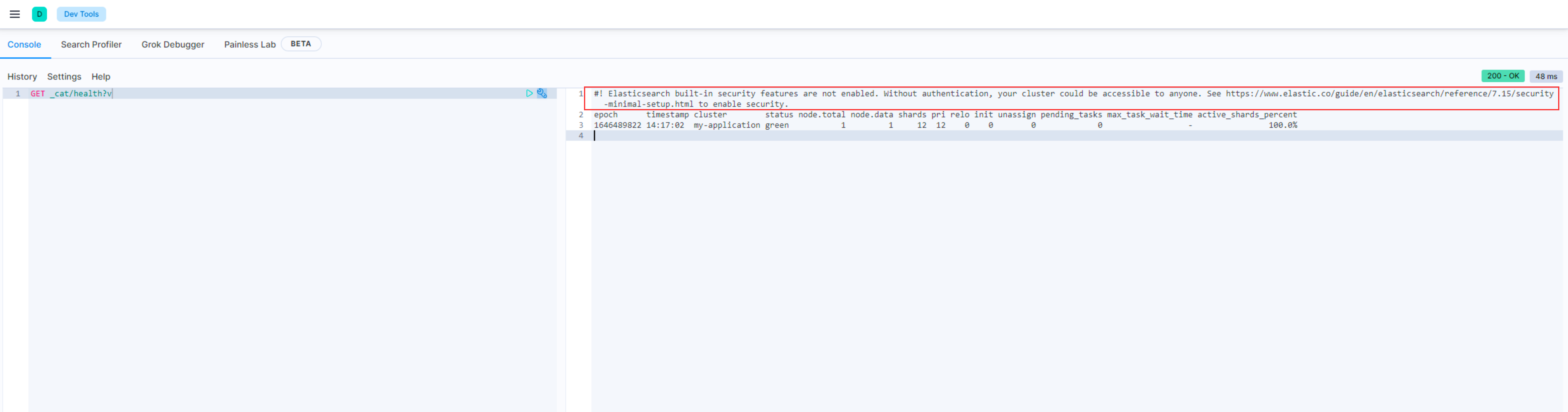
关闭Elasticsearch built-in security features are not enabled
禁用Kibana安全提示(Elasticsearch built-in security features are not enabled) Kibana提示#! Elasticsearch built-in security features are not enabled. Without authentication, your cluster could be accessible to anyone. See https://www.e…...

MC0248 密码判断器(判断强弱密码)
原题链接<---- islower 小写字母判断 isupper 大写字母判断 isdigit 数字判断 题目: 小码哥在是一位密码领域的初学者,有一天他的老师给他了一串密码,要他判断这个密码是否是强密码,老师和他说强密码就是需要同时达到以下要求࿱…...
vue3+threejs新手从零开发卡牌游戏(十六):初始化对方手牌
添加对方手牌区时注意位置调整,以及手牌应该是背面朝上,加个rotateX翻转即可,其他代码和p1.vue代码一致,game/hand/p2.vue代码如下: <template><div></div> </template><script setup lan…...

网页无插件视频播放器,支持录像、截图、音视频播放,多路播放等,提供源码下载
前言 本播放器内部采用jessibuca插件接口,支持录像、截图、音视频播放等功能。播放器播放基于ws流,分屏操作支持1分屏、4分屏、6分屏、9分屏方式。 jessibuca工作原理是通过Emscripten将音视频解码库编译成Js(WebAssembly,简称was…...
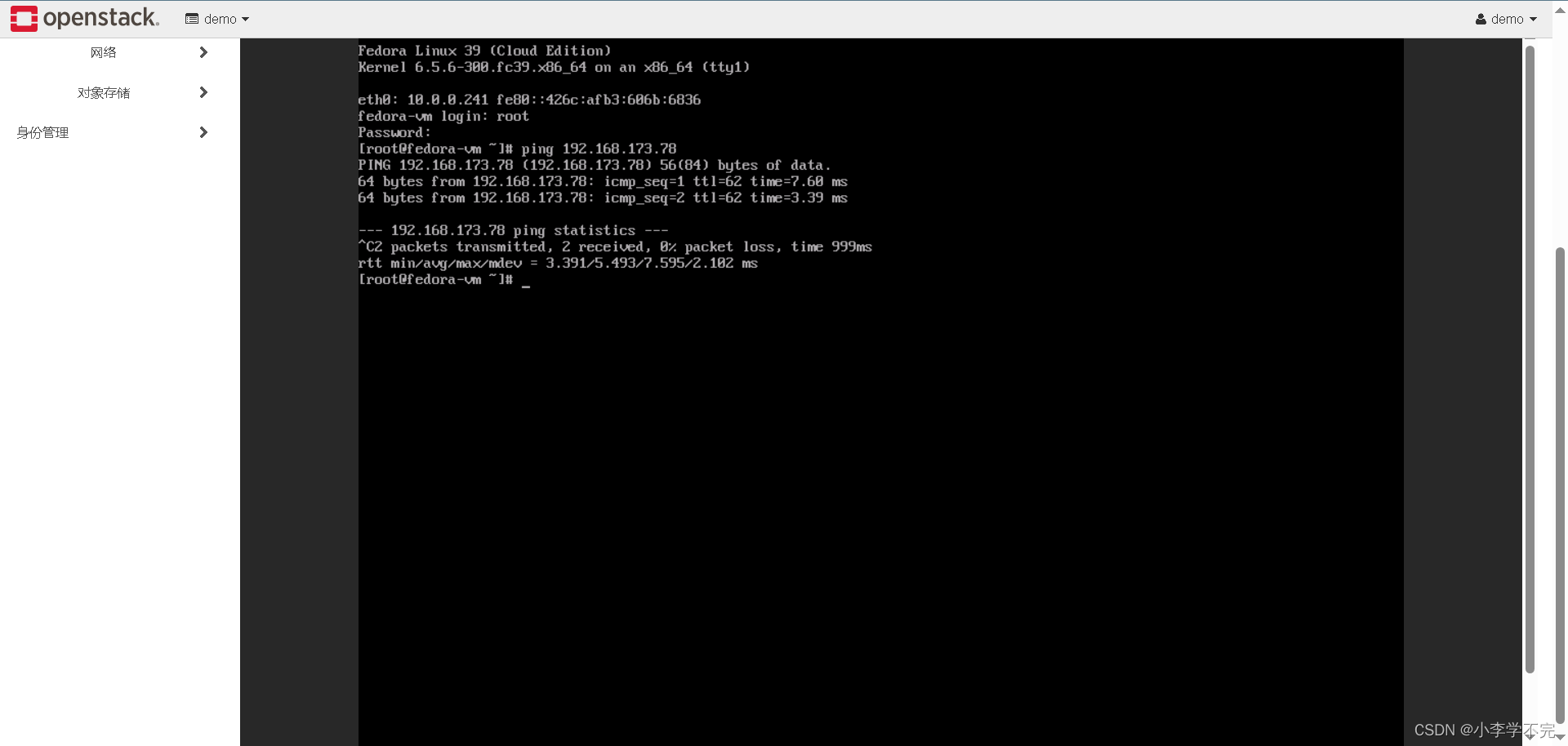
Openstack创建和操作实例,实现与外部网络通信
一、熟悉OpenStack图形界面操作 1、了解Horizon项目 Horizon项目 各OpenStack服务的图形界面都是由Horizon提供的。Horizon提供基于Web的模块化用户界面。Horizon为云管理员提供一个整体的视图。Horizon为终端用户提供一个自主服务的门户。Horizon由云管理员进行管理与控制&a…...

dubbo 源码系列之-集群三板斧---负载均衡(二)
在上一课时我们了解了 LoadBalance 接口定义以及 AbstractLoadBalance 抽象类的内容,还详细介绍了 ConsistentHashLoadBalance 以及 RandomLoadBalance 这两个实现类的核心原理和大致实现。本课时我们将继续介绍 LoadBalance 的剩余三个实现。 LeastActiveLoadBala…...

【一周一篇小题解】洛谷P1035级数求和
还是很简单的…… 首先,输入k,再定义一个双精度浮点数s,不停的循环 for(i1;;i) 每次循环加上1.0/i s1.0/i; 如果大于k就停止循环,并输出,也可以输出后直接结束程序 写法一: if(s>k) { printf("%…...

2024-03-26 AIGC-大模型学习路线
摘要: 2024-03-26 AIGC-大模型学习路线 大模型学习路线 建议先从主流的Llama开始,然后选用中文的Qwen/Baichuan/ChatGLM,先快速上手体验prompt工程,然后再学习其架构,跑微调脚本 如果要深入学习,建议再按以下步骤&am…...
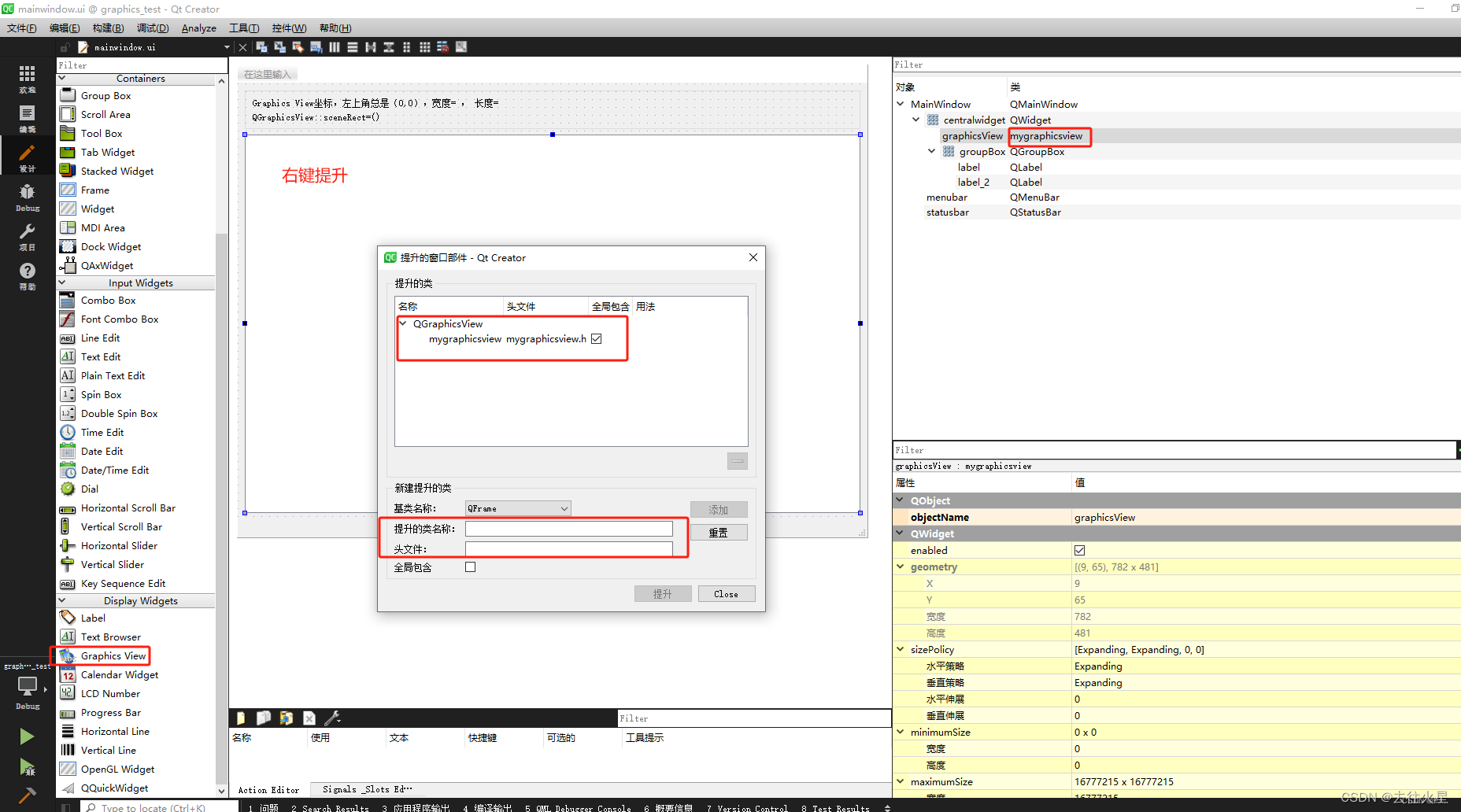
QGraphicsView的使用,view坐标,scene坐标,item坐标
Graphics View绘图构架 QGraphicsScene(场景):可以管理多个图形项QGraphicsItem(图形项):也就是图元,支持鼠标事件响应。QGraphicsView(视图):关联场景可以让…...
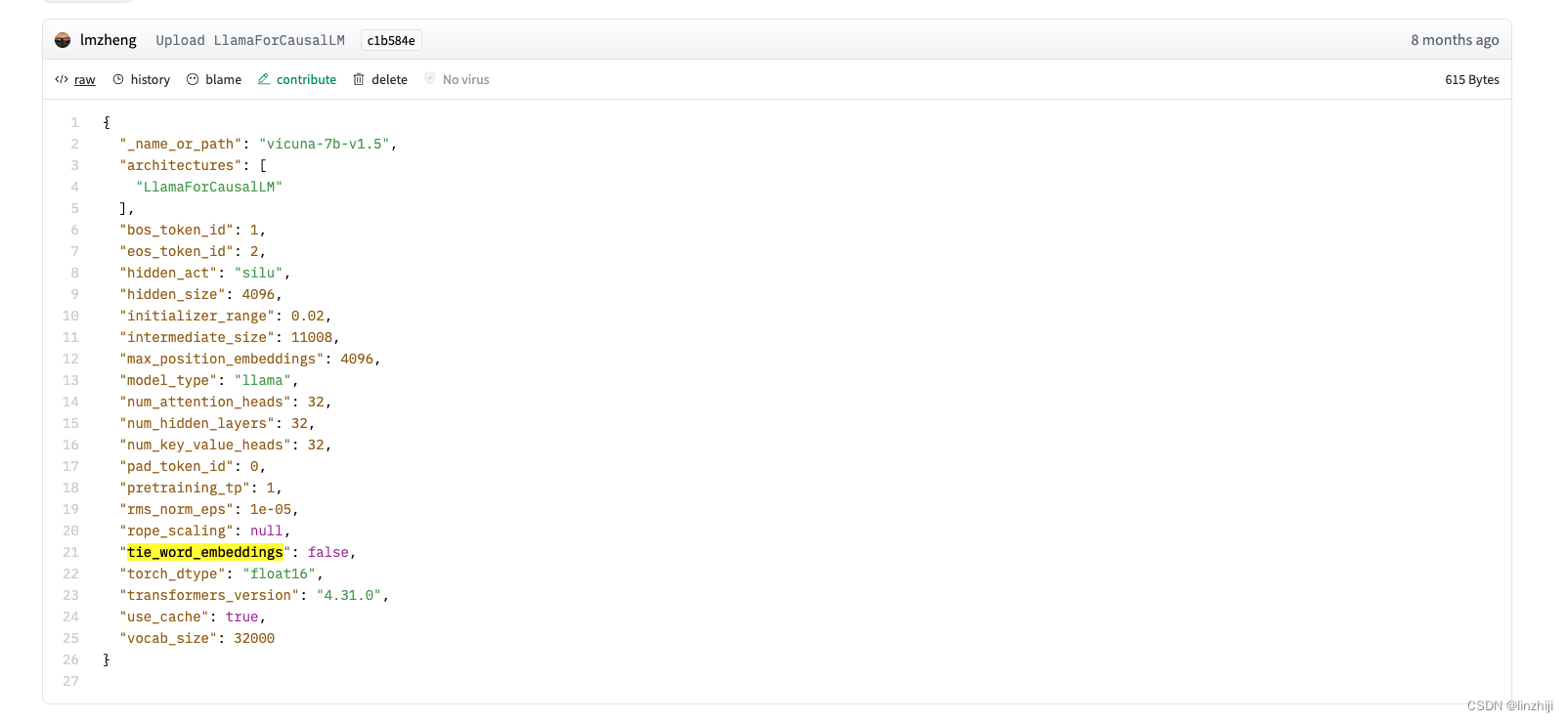
from_pretrained 做了啥
transformers的三个核心抽象类是Config, Tokenizer和Model,这些类根据模型种类的不同,派生出一系列的子类。构造这些派生类的对象也很简单,transformers为这三个类都提供了自动类型,即AutoConfig, AutoTokenizer和AutoModel。三个…...
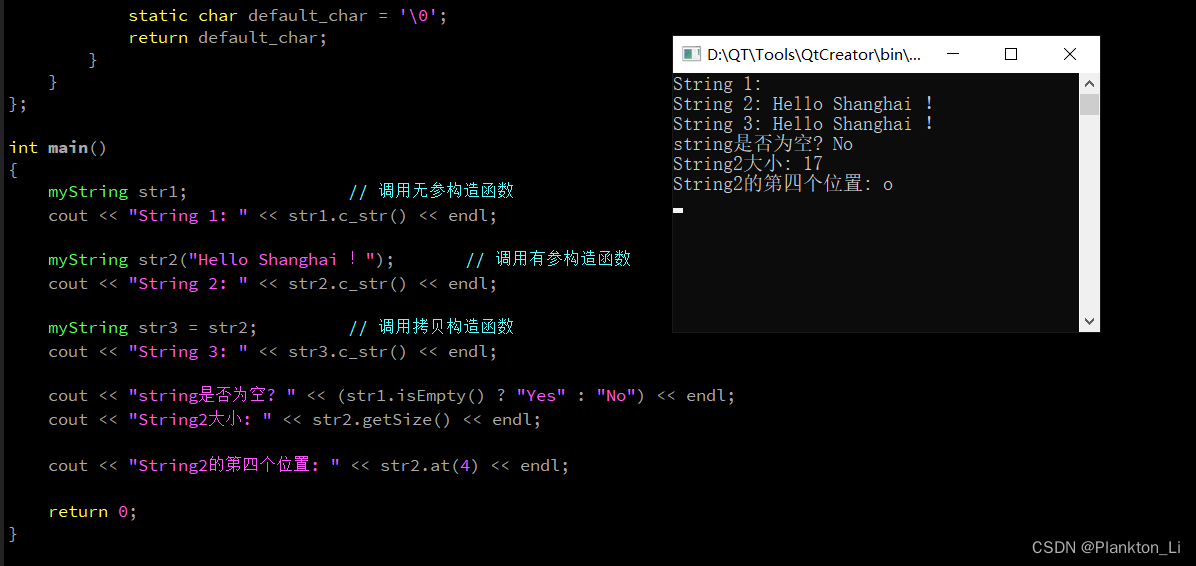
2024/03/27(C++·day3)
一、思维导图 二、完成下面类 代码 #include <cstring> #include <iostream>using namespace std;class myString { private:char *str; // 记录C风格的字符串int size; // 记录字符串的实际长度public:// 无参构造函数myString() : size(10){str new char[si…...

.Net框架,除了EF还有很多很多......
文章目录 1. 引言2. Dapper2.1 概述与设计原理2.2 核心功能与代码示例基本查询多映射查询存储过程调用 2.3 性能优化原理2.4 适用场景 3. NHibernate3.1 概述与架构设计3.2 映射配置示例Fluent映射XML映射 3.3 查询示例HQL查询Criteria APILINQ提供程序 3.4 高级特性3.5 适用场…...

多场景 OkHttpClient 管理器 - Android 网络通信解决方案
下面是一个完整的 Android 实现,展示如何创建和管理多个 OkHttpClient 实例,分别用于长连接、普通 HTTP 请求和文件下载场景。 <?xml version"1.0" encoding"utf-8"?> <LinearLayout xmlns:android"http://schemas…...
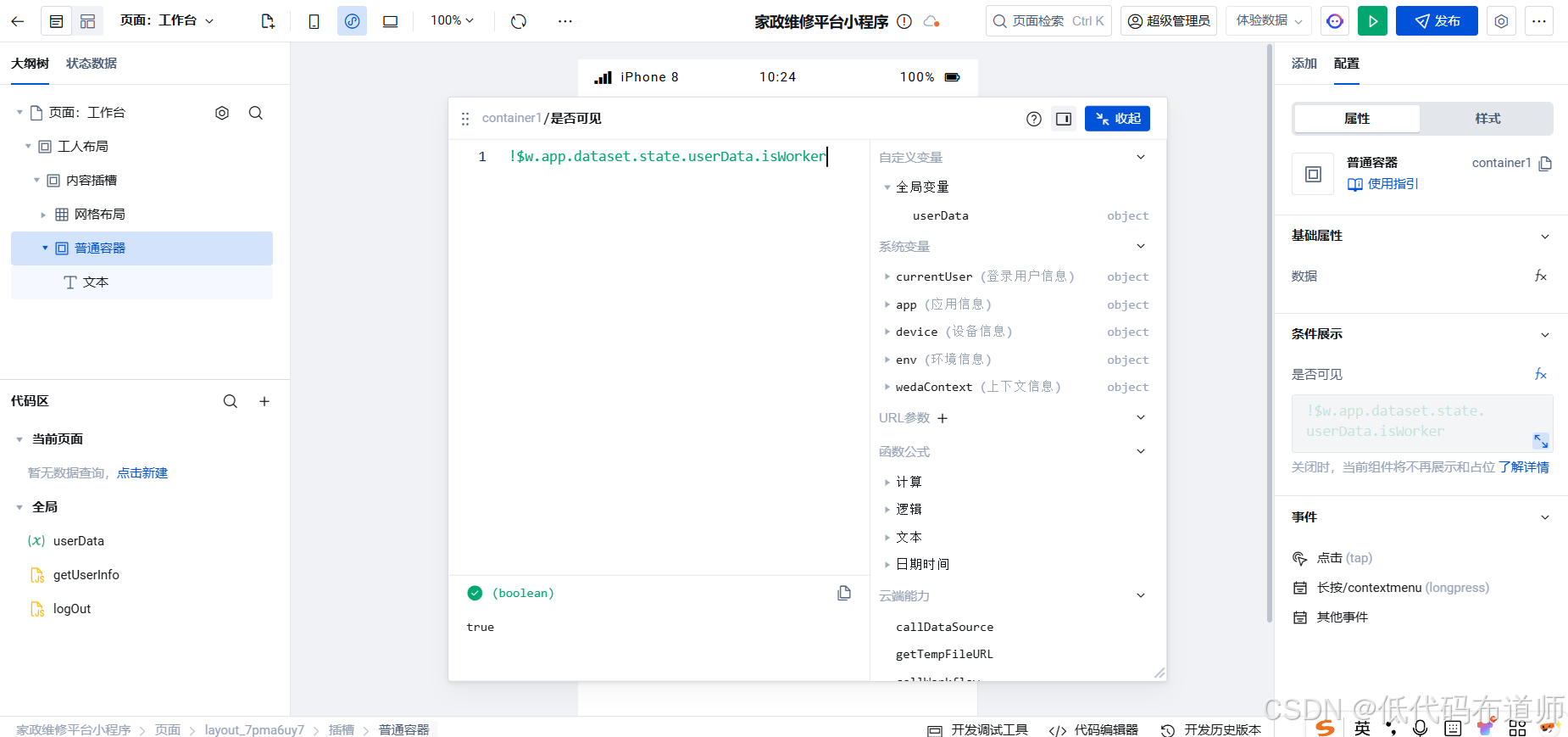
家政维修平台实战20:权限设计
目录 1 获取工人信息2 搭建工人入口3 权限判断总结 目前我们已经搭建好了基础的用户体系,主要是分成几个表,用户表我们是记录用户的基础信息,包括手机、昵称、头像。而工人和员工各有各的表。那么就有一个问题,不同的角色…...

五年级数学知识边界总结思考-下册
目录 一、背景二、过程1.观察物体小学五年级下册“观察物体”知识点详解:由来、作用与意义**一、知识点核心内容****二、知识点的由来:从生活实践到数学抽象****三、知识的作用:解决实际问题的工具****四、学习的意义:培养核心素养…...

Java 二维码
Java 二维码 **技术:**谷歌 ZXing 实现 首先添加依赖 <!-- 二维码依赖 --><dependency><groupId>com.google.zxing</groupId><artifactId>core</artifactId><version>3.5.1</version></dependency><de…...

Java + Spring Boot + Mybatis 实现批量插入
在 Java 中使用 Spring Boot 和 MyBatis 实现批量插入可以通过以下步骤完成。这里提供两种常用方法:使用 MyBatis 的 <foreach> 标签和批处理模式(ExecutorType.BATCH)。 方法一:使用 XML 的 <foreach> 标签ÿ…...

Git常用命令完全指南:从入门到精通
Git常用命令完全指南:从入门到精通 一、基础配置命令 1. 用户信息配置 # 设置全局用户名 git config --global user.name "你的名字"# 设置全局邮箱 git config --global user.email "你的邮箱example.com"# 查看所有配置 git config --list…...
基于Java+VUE+MariaDB实现(Web)仿小米商城
仿小米商城 环境安装 nodejs maven JDK11 运行 mvn clean install -DskipTestscd adminmvn spring-boot:runcd ../webmvn spring-boot:runcd ../xiaomi-store-admin-vuenpm installnpm run servecd ../xiaomi-store-vuenpm installnpm run serve 注意:运行前…...

LOOI机器人的技术实现解析:从手势识别到边缘检测
LOOI机器人作为一款创新的AI硬件产品,通过将智能手机转变为具有情感交互能力的桌面机器人,展示了前沿AI技术与传统硬件设计的完美结合。作为AI与玩具领域的专家,我将全面解析LOOI的技术实现架构,特别是其手势识别、物体识别和环境…...

k8s从入门到放弃之HPA控制器
k8s从入门到放弃之HPA控制器 Kubernetes中的Horizontal Pod Autoscaler (HPA)控制器是一种用于自动扩展部署、副本集或复制控制器中Pod数量的机制。它可以根据观察到的CPU利用率(或其他自定义指标)来调整这些对象的规模,从而帮助应用程序在负…...