OpenGL的MVP矩阵理解
OpenGL的MVP矩阵理解
右手坐标系
右手坐标系与左手坐标系都是三维笛卡尔坐标系,他们唯一的不同在于z轴的方向,如下图,左边是左手坐标系,右边是右手坐标系
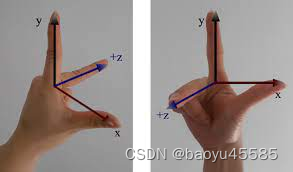
OpenGL中一般用的是右手坐标系
1.模型坐标系(Local Space)
模型坐标系(或者叫本地坐标系、局部坐标系,本文后面统一称模型坐标系)顾名思义,就是以物体的正中心为原点的坐标系,通常,我们从三维软件中导出的模型基本是局部坐标系,以模型的中心为原点,其他顶点相对于模型的原点来定义。
2. 世界坐标系 (World Space)
世界坐标系就是全局的那个坐标系,我们的物体,以及后面观察物体用到的摄像机全都在世界坐标系中,原点为(0,0,0)
3. 视图坐标系(View Space)
视图坐标系也就是在世界坐标系中通过假想一个摄像机或者观察者的存在,以摄像机的位置为中心原点,然后从摄像机这个观察者的角度去重新计算世界中的物体相对于摄像机原点的坐标
什么是MVP矩阵?
MVP矩阵分别是模型(Model)、观察(View)、投影(Projection)三个矩阵。
gl_Position = projection * view * model * vec4(x,y,z, 1.0);
模型(Model)矩阵
模型矩阵主要做的旋转、缩放、平移操作
案例:
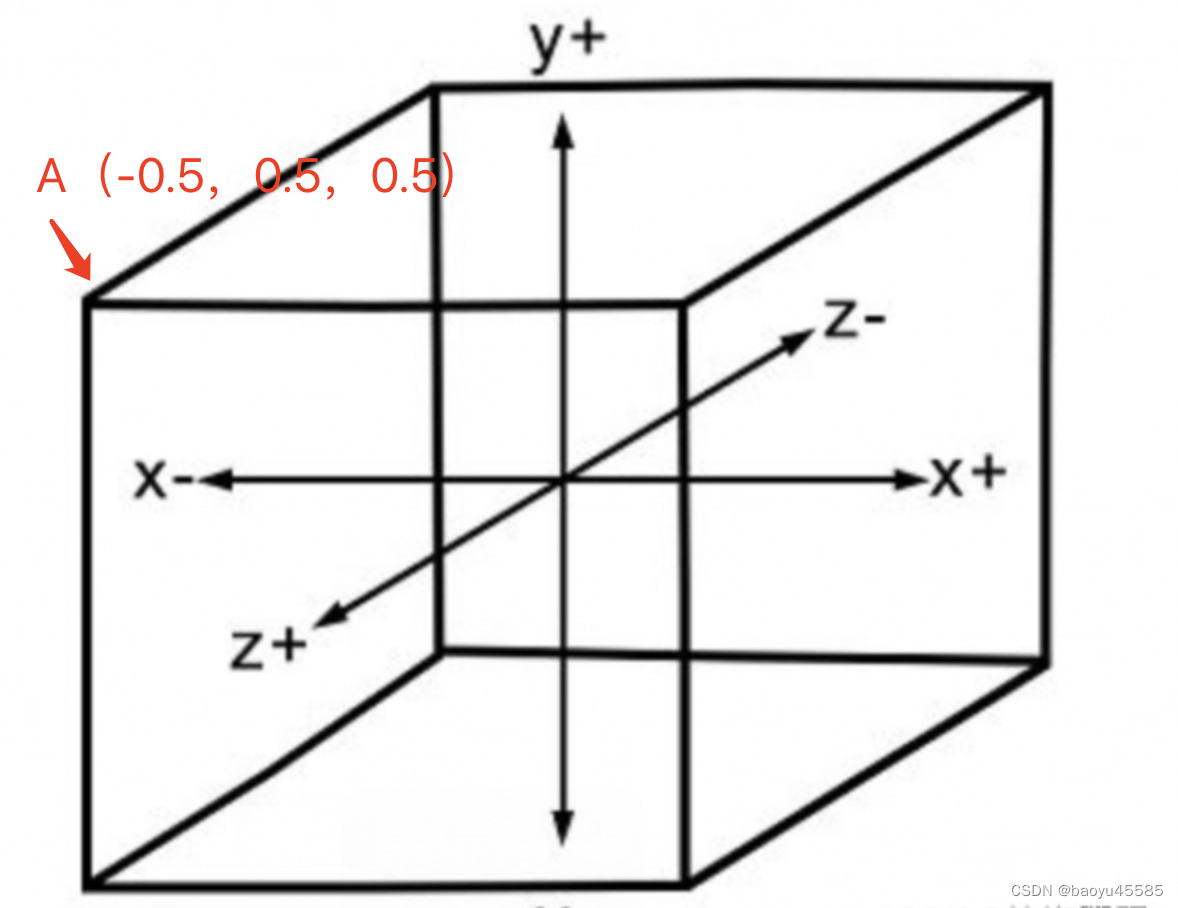
按世界坐标(0,0,0)为原点,绘制一个正方体如下图,这时候,模型坐标系和世界坐标系原点是重合的,A为正方体的左上前方位置坐标。对应坐标(-0.5,0.5,0.5)
如果,绘制10个,分别进行旋转、平移、缩放,对应如下图,对应的每个3维正方体,对应世界坐标的位置(0,0,0),对应的A的坐标,模型坐标系还是(-0.5,0.5,0.5),那个世界坐标呢?就是A(-0.5,0.5,0.5)进行旋转、平移、缩放的坐标
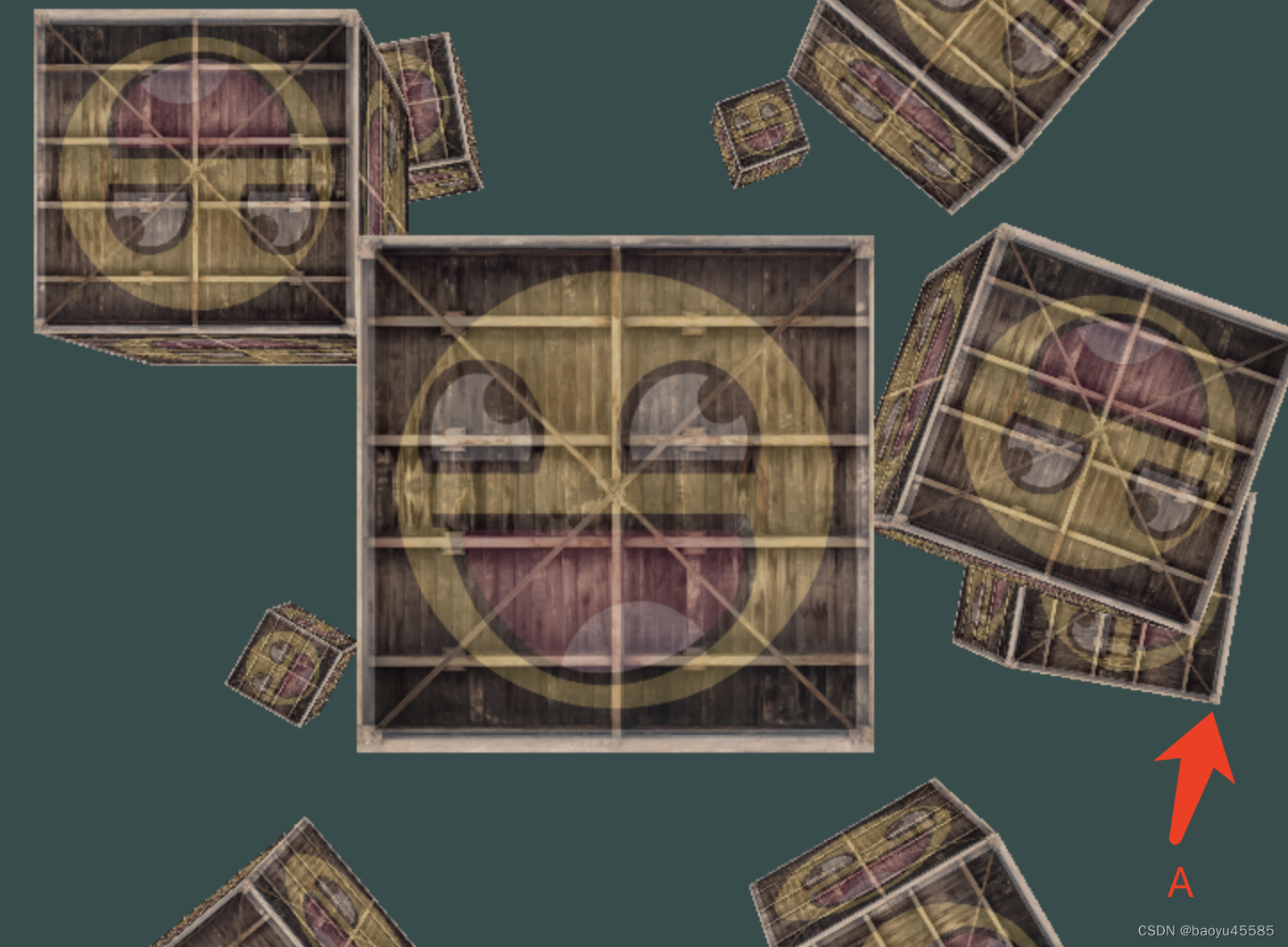
对应具体矩阵看该章节
第四章 OpenGL ES 基础-位移、缩放、旋转原理
[
观察(View)矩阵
OpenGL中其实不存在专门的相机,view矩阵的目的就是确定物体与相机的相对位置。注意,此处的物体指的是全部的物体形成的集合,也就是案例中的十个正方体形成的组,而不是某个单一物体
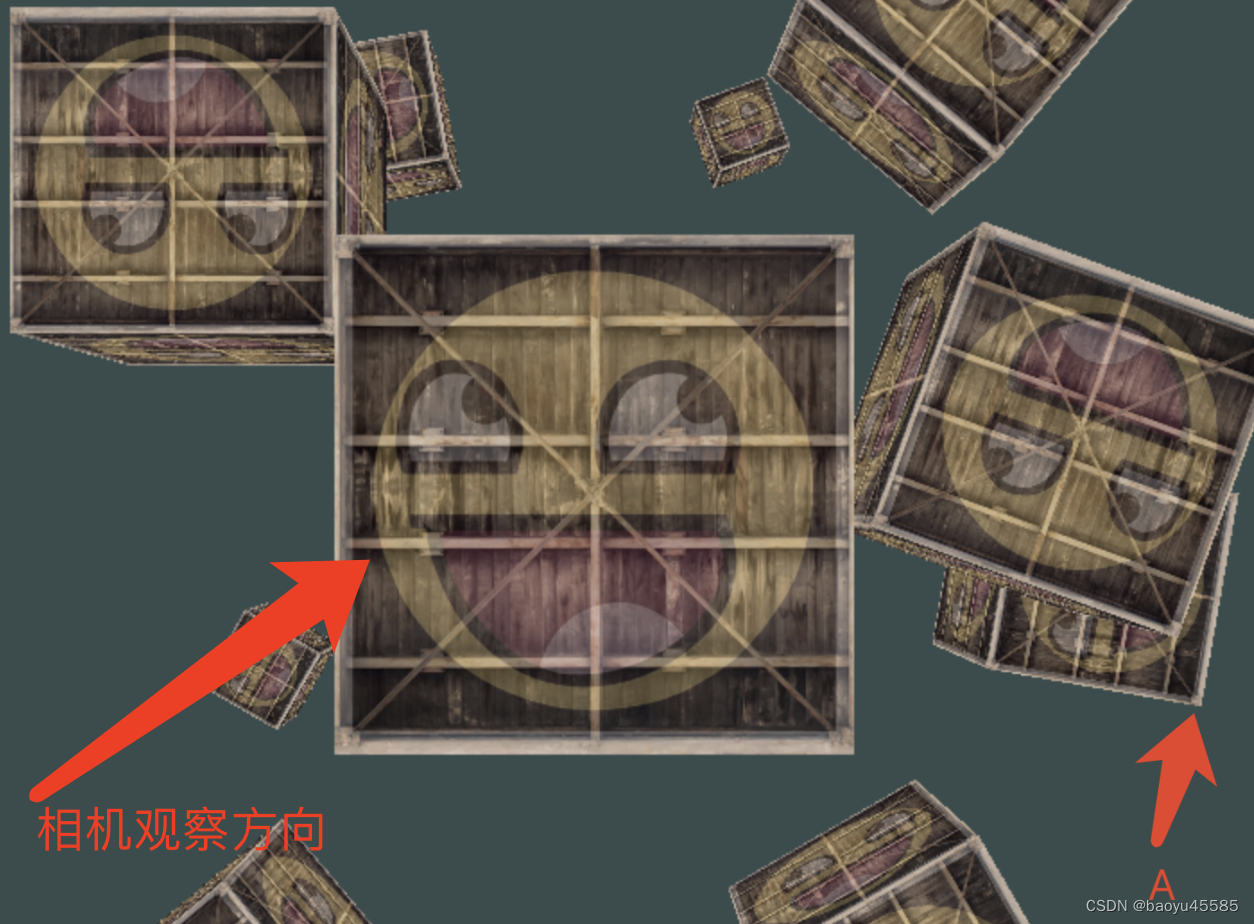
先简单的把相机的位置按世界坐标系相对相机cameraPos(0,0,-3)按轴进行观察,想看到物体看起来变得更远,可以此时物体位于相对相机(0,0,-5),相机位置在z轴更远,正方体更小。这里说明一下视图坐标系,如果按视图坐标系原点cameraTarget(0,0,0),世界坐标系的原点位置就是(0,0,-3)。上图相机观察方向可以自己补充,相对的移动旋转等操作
glm::vec3 cameraPos = glm::vec3(0.0f, 0.0f, -3.0f);
glm::vec3 cameraTarget = glm::vec3(0.0f, 0.0f, 0.0f);
glm::vec3 cameraDirection = glm::normalize(cameraPos - cameraTarget);
对应的矩阵变化可以LookAt观察矩阵https://blog.csdn.net/qinze5857/article/details/130505925
投影(Projection)矩阵
投影矩阵为了把3D的渲染在2D的屏幕
第五章 OpenGL ES 基础-透视投影矩阵与正交投影矩阵
上面文章有参考,该文章https://blog.csdn.net/Lindy_pass/article/details/132408991
相关文章:
OpenGL的MVP矩阵理解
OpenGL的MVP矩阵理解 右手坐标系 右手坐标系与左手坐标系都是三维笛卡尔坐标系,他们唯一的不同在于z轴的方向,如下图,左边是左手坐标系,右边是右手坐标系 OpenGL中一般用的是右手坐标系 1.模型坐标系(Local Space&…...
前端超分辨率技术应用:图像质量提升与场景实践探索-设计篇
超分辨率! 引言 在数字化时代,图像质量对于用户体验的重要性不言而喻。随着显示技术的飞速发展,尤其是移动终端视网膜屏幕的广泛应用,用户对高分辨率、高质量图像的需求日益增长。然而,受限于网络流量、存储空间和图像…...

C++11入门手册第一节,学完直接上手Qt(共两节)
入门 hello.cpp #include <iostream>int main() { std::cout << "Hello Quick Reference\n"<<endl; return 0;} 编译运行 $ g hello.cpp -o hello$ ./helloHello Quick Reference 变量 int number 5; // 整数float f 0.95; //…...
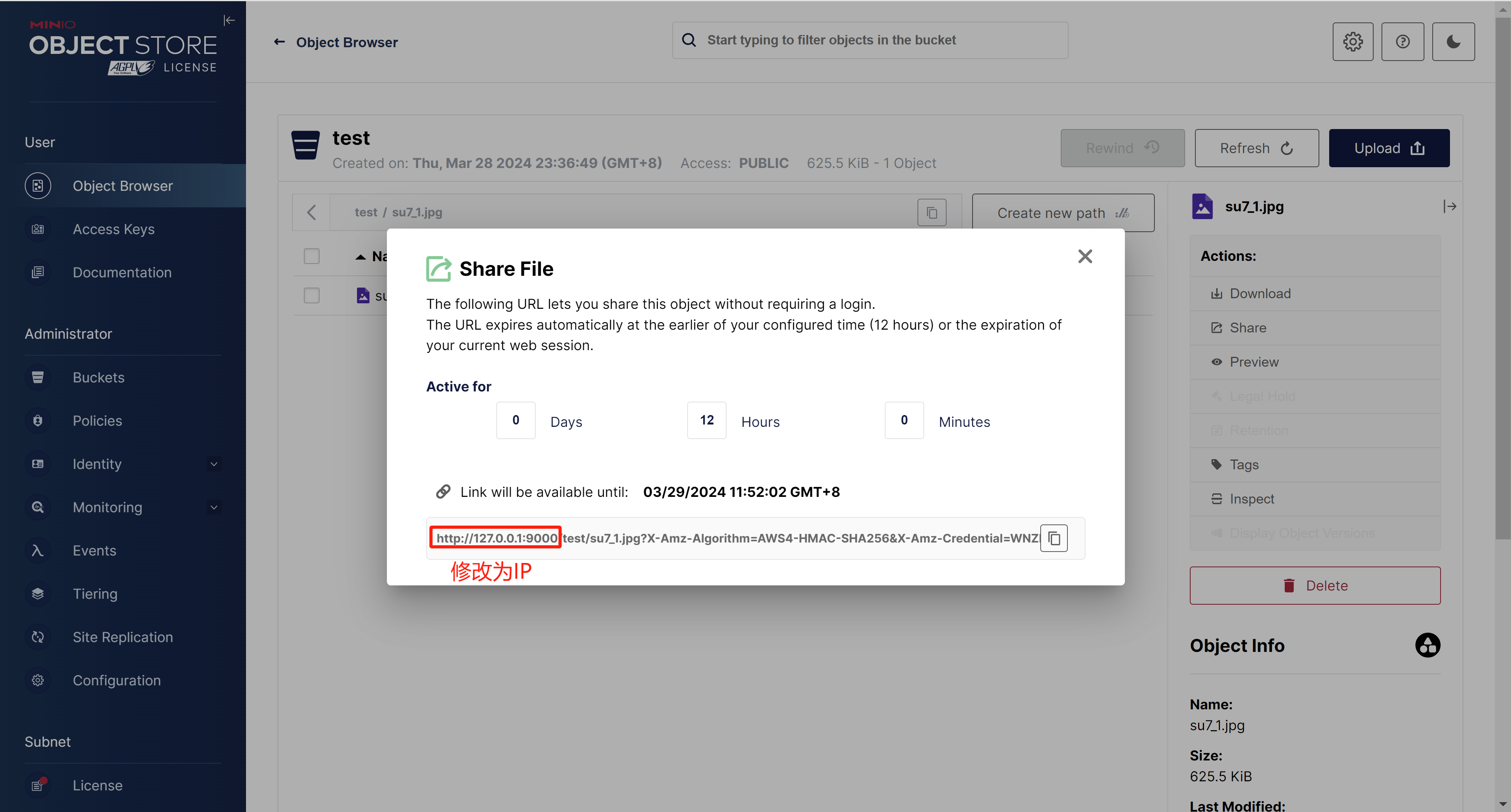
Docker部署MinIO对象存储服务
1. 拉取MinIO镜像 # 下载镜像 docker pull minio/minio#查看镜像 docker images2. 创建目录 # 文件存储目录 mkdir -p /opt/minio/data# 配置文件 mkdir -p /opt/minio/config# 日志文件 mkdir -p /opt/minio/logs3. 创建Minio容器并运行 docker run \ -p 9000:9000 \ -p 90…...
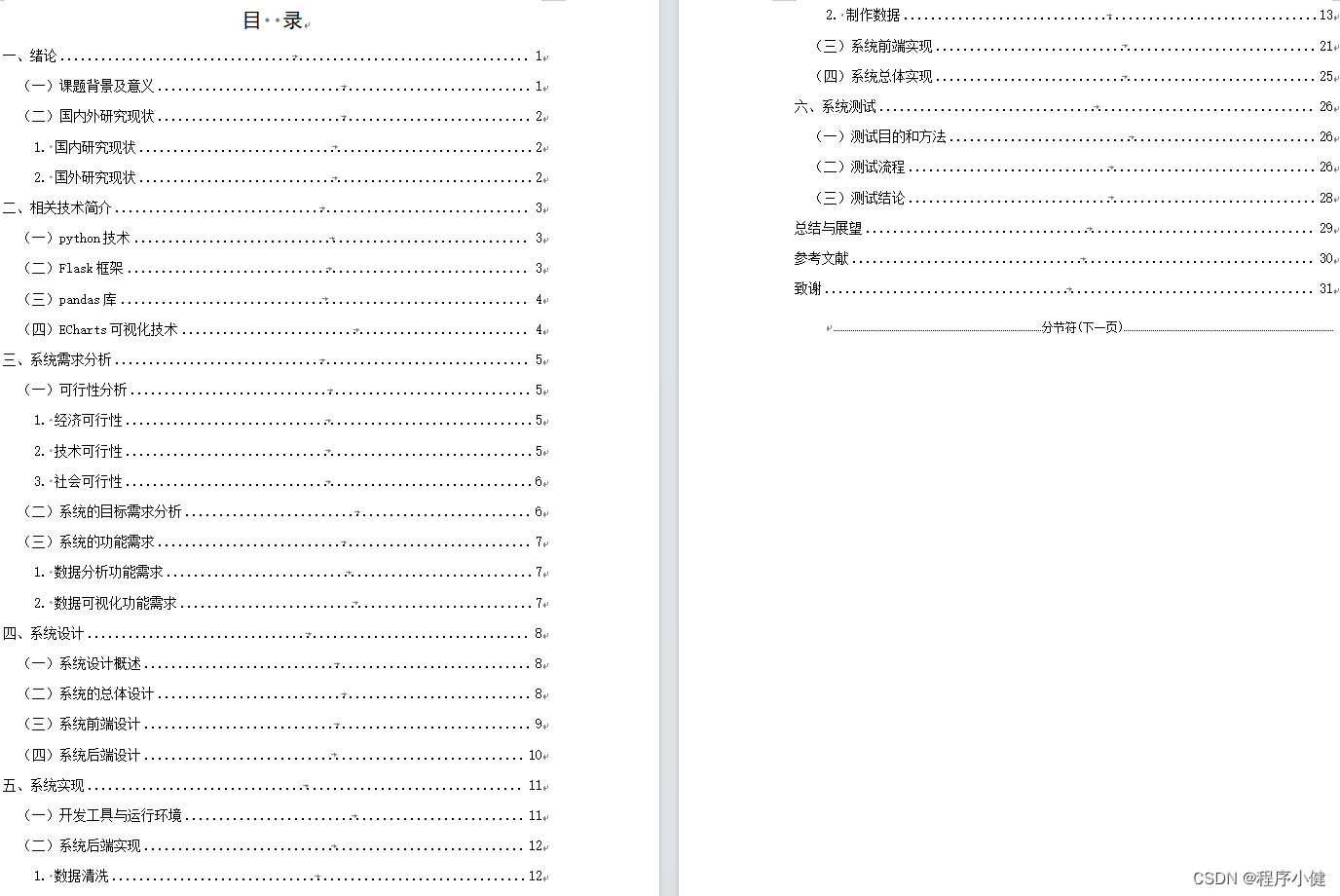
基于Echarts的超市销售可视化分析系统(数据+程序+论文)
本论文旨在研究Python技术和ECharts可视化技术在超市销售数据分析系统中的应用。本系统通过对超市销售数据进行分析和可视化展示,帮助决策层更好地了解销售情况和趋势,进而做出更有针对性的决策。本系统主要包括数据处理、数据可视化和系统测试三个模块。…...

使用ai智能写作场景之gpt整理资料,如何ai智能写作整理资料
Ai智能写作助手:Ai智能整理资料小助手 Ai智能整理资料小助手可试用3天! 通俗的解释一下怎么用ChatGPT来进行资料整理: 搜寻并获取指定数量的特定领域文章: 想像你在和我说话一样,告诉我你想要多少篇关于某个话题的文…...

C/C++ 内存管理
1、C/C内存分布 首先我们来了解在一个程序中,代码主要存储在哪些地方; 1.栈:又叫堆栈,其中一般存储非静态局部变量、函数参数、返回值等,栈的增长是向下的。 2.内存映射段:是高效的 I/O 映射方式࿰…...

android pdf框架-10,相册浏览
MupdfViewer 这是最后apk,源码在前面的文章已经贴过了本站下载地址,只是不是最新的.可能不少是旧的内容. subsampling-scale-image-view这是一个大图片的分块加载的实现.比较不错的.滑动方面我觉得使用flinger的效果比它要流畅,惯性要好. 也有人把这个作成pdf渲染器.但翻页就…...
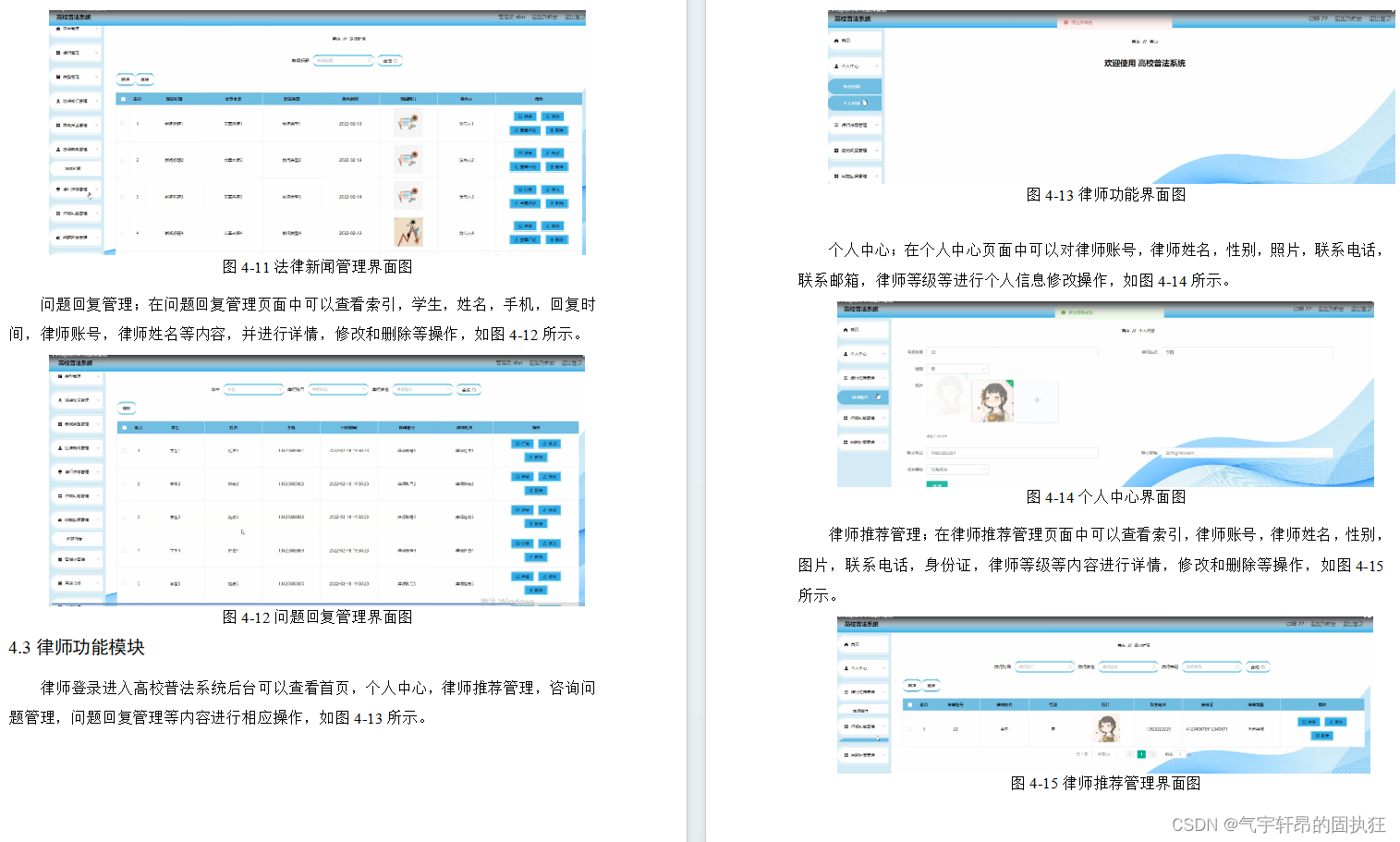
基于SSM的高校普法系统(有报告)。Javaee项目。ssm项目。
演示视频: 基于SSM的高校普法系统(有报告)。Javaee项目。ssm项目。 项目介绍: 采用M(model)V(view)C(controller)三层体系结构,通过Spring Spri…...

数据结构刷题篇 之 【力扣二叉树基础OJ】详细讲解(含每道题链接及递归图解)
有没有一起拼用银行卡的,取钱的时候我用,存钱的时候你用 1、相同的树 难度等级:⭐ 直达链接:相同的树 2、单值二叉树 难度等级:⭐ 直达链接:单值二叉树 3、对称二叉树 难度等级:⭐⭐ 直达…...

Jackson 2.x 系列【6】注解大全篇二
有道无术,术尚可求,有术无道,止于术。 本系列Jackson 版本 2.17.0 源码地址:https://gitee.com/pearl-organization/study-jaskson-demo 文章目录 注解大全2.11 JsonValue2.12 JsonKey2.13 JsonAnySetter2.14 JsonAnyGetter2.15 …...
在低成本loT mcu上实现深度神经网络端到端自动部署-深度神经网络、物联网、边缘计算、DNN加速——文末完整资料
目录 前言 DNN 量化神经网络 并行超低功耗计算范式 面向内存的部署 结果 原文与源码下载链接 REFERENCES 前言 在物联网极端边缘的终端节点上部署深度神经网络( Deep Neural Networks,DNNs )是支持普适深度学习增强应用的关键手段。基于低成本MCU的终端节点…...
【linux】基础IO |文件操作符
需要掌握:操作文件,本质:进程操作文件。进程和文件的关系 向文件中写入,本质上向硬件中写入->用户没有权利直接写入->操作系统是硬件的管理者,我们可以通过操作系统往硬件写入->操作系统必须提供系统调用&…...

探索 2024 年 Web 开发最佳前端框架
前端框架通过简化和结构化的网站开发过程改变了 Web 开发人员设计和实现用户界面的方法。随着 Web 应用程序变得越来越复杂,交互和动画功能越来越多,这是开发前端框架的初衷之一。 在网络的早期,网页相当简单。它们主要以静态 HTML 为特色&a…...

解决: MAC ERROR [internal] load metadata for docker.io/library/openjdk:17
错误信息: ERROR [internal] load metadata for docker.io/library/openjdk:17 ERROR: failed to solve: openjdk:17: error getting credentials - err: exit status 1, out: 解决方法: running this command rm ~/.docker/config.json before …...
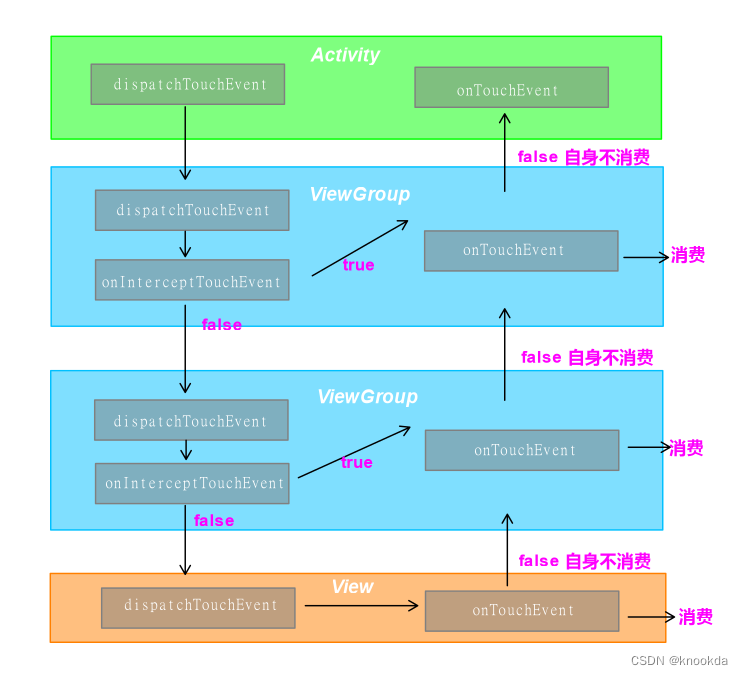
View事件分发
MotionEvent 1.简介 MotionEvent 是Android系统中一个非常重要的类,它代表了屏幕上发生的触摸事件。当用户在屏幕上触摸、滑动或者长按时,都会生成一个MotionEvent对象,这个对象包含了触摸动作的各种信息。 2.事件类型 ACTION_DOWN&#x…...

监听页面的使用时间
如果是比较新的vue架构(推荐,参考若依) 监听create()和destory()两个函数,写通用的js调用函数,在路由守卫的时候使用,就可以获取到每个页面停留时间 如果是比…...
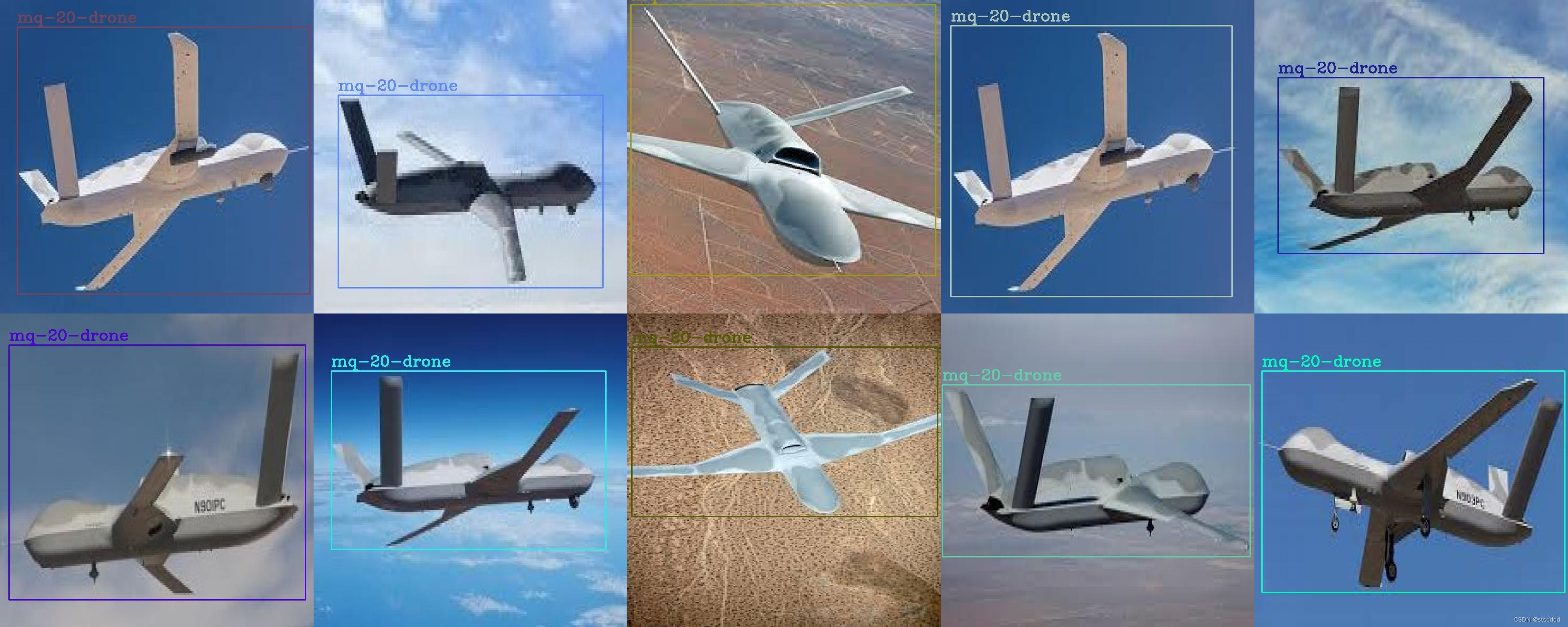
【 yolo红外微小无人机-直升机-飞机-飞鸟目标检测】
yolo无人机-直升机-飞机-飞鸟目标检测 1. 小型旋翼无人机目标检测2. yolo红外微小无人机-直升机-飞机-飞鸟目标检测3. yolo细分类型飞机-鸟类-无人机检测4. yolo红外大尺度无人机检测5. 小型固定翼无人机检测6. 大型固定翼无人机检测7. yolo航空俯视场景下机场飞机检测 1. 小型…...
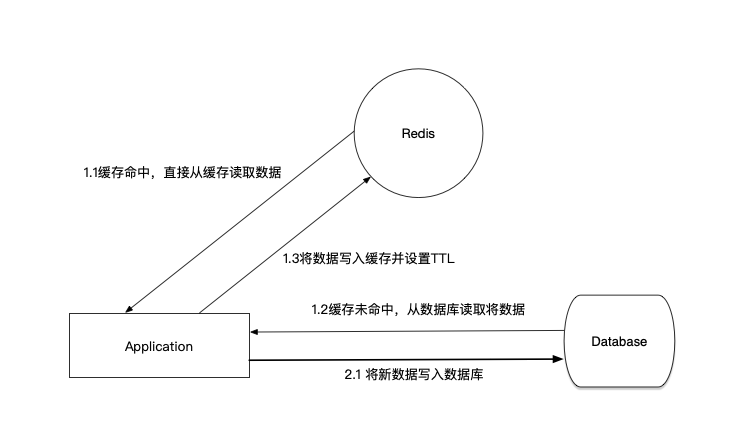
Redis与数据库的一致性
Redis与数据库的数据一致性 在使用Redis作为应用缓存来提高数据的读性能时,经常会遇到Redis与数据库的数据一致性问题。简单来说,就是同一份数据同时存在于Redis和数据库,如何在数据更新的时候,保证两边数据的一致性。首先&#…...

使用maxwell实时同步mysql数据到kafka
一、软件环境: 操作系统:CentOS release 6.5 (Final) java版本: jdk1.8 zookeeper版本: zookeeper-3.4.11 kafka 版本: kafka_2.11-1.1.0.tgz maxwell版本:maxwell-1.16.0.tar.gz 注意 : 关闭所有机器的防火墙,同时注意…...

优化实践:结合ResNet与CBAM注意力机制提升垃圾分类模型性能
1. ResNet与CBAM模块技术解析 1.1 ResNet的核心设计思想 ResNet(残差网络)之所以能成为深度学习领域的里程碑,关键在于它解决了传统深度神经网络的两大痛点:梯度消失问题和网络退化现象。想象一下教小朋友搭积木,当积木…...

3种方法让加密音乐重获自由:Unlock Music浏览器解密工具详解
3种方法让加密音乐重获自由:Unlock Music浏览器解密工具详解 【免费下载链接】unlock-music 在浏览器中解锁加密的音乐文件。原仓库: 1. https://github.com/unlock-music/unlock-music ;2. https://git.unlock-music.dev/um/web 项目地址:…...

Midscene.js从入门到精通:AI驱动的跨平台自动化技术指南
Midscene.js从入门到精通:AI驱动的跨平台自动化技术指南 【免费下载链接】midscene Let AI be your browser operator. 项目地址: https://gitcode.com/GitHub_Trending/mid/midscene 在数字化时代,软件界面的动态变化和跨平台兼容性给自动化测试…...

[2026 职场洗牌系列 01] 程序员正在“杀死”自己的工作?科技行业高危预警
长久以来,学计算机(CS)在很多年轻人眼里就等同于拿到了通往高薪和阶层跃升的金钥匙。大家都觉得,只要把代码敲得溜,这辈子在职场上基本就稳了。可惜,到了2026年的今天,生成式AI正在毫不留情地把…...

项目管理工具怎么选?8款主流产品测评与选型建议
项目管理工具怎么选?真正需要比较的,不只是功能多少,而是它是否适合团队的协作方式、项目复杂度和管理阶段。本文围绕场景匹配、流程灵活性、信息沉淀、管理视图和落地成本,对8款主流项目管理工具做一轮顾问式测评。引言很多企业在…...

MediaPipe Holistic实战效果:一张照片生成全身骨骼图,效果超乎想象
MediaPipe Holistic实战效果:一张照片生成全身骨骼图,效果超乎想象 1. 引言:当AI遇见全身感知 想象一下,你只需要上传一张普通的全身照片,AI就能自动识别出你的面部表情、手势动作和身体姿态,并生成一张精…...

SGLang-v0.5.6实战体验:5种预装镜像,哪个最适合你的项目?
SGLang-v0.5.6实战体验:5种预装镜像,哪个最适合你的项目? 选型会上,技术负责人又抛出了那个经典问题:“我们到底用哪个环境来部署SGLang?” 会议室里立刻热闹起来。有人坚持用PyTorch 2.1,说它…...

OpenClaw定时任务管理:Qwen3.5-4B-Claude模型驱动智能提醒系统
OpenClaw定时任务管理:Qwen3.5-4B-Claude模型驱动智能提醒系统 1. 为什么需要AI驱动的定时任务系统 上个月我连续错过了三个重要会议,直到同事发消息询问"人到哪了"才猛然惊醒。这种尴尬促使我开始寻找解决方案——传统日历提醒太被动&#…...
)
电磁学核心概念与解题框架精讲(猴博士风格)
1. 电磁学基础概念拆解:从场强到电势 电场强度E和电势U是电磁学中最基础的两个物理量,就像描述一个人需要身高和体重两个指标一样。很多同学刚开始学电磁学时容易混淆这两个概念,我用一个简单的类比帮大家理解:想象电场强度就像山…...

像素时装锻造坊应用场景:AR滤镜开发中像素化虚拟服装贴图生成流程
像素时装锻造坊应用场景:AR滤镜开发中像素化虚拟服装贴图生成流程 1. 项目背景与核心价值 像素时装锻造坊(Pixel Fashion Atelier)是一款基于Stable Diffusion与Anything-v5的图像生成工作站,专为AR滤镜开发中的虚拟服装贴图生成…...