yolov8直接调用zed相机实现三维测距(python)
yolov8直接调用zed相机实现三维测距(python)
- 1. 相关配置
- 2. 版本一
- 2.1 相关代码
- 2.2 实验结果
- 3. 版本二
- 3.1 相关代码
- 3.2 实验结果
相关链接
此项目直接调用zed相机实现三维测距,无需标定,相关内容如下:
1.yolov5直接调用zed相机实现三维测距(python)
2. yolov4直接调用zed相机实现三维测距
3. Windows+YOLOV8环境配置
4.具体实现效果已在哔哩哔哩发布,点击此链接跳转
本篇博文工程源码下载(麻烦github给个星星)
下载链接:https://github.com/up-up-up-up/zed-yolov8
附:Zed调用YOLOv7测距也已经实现,但是3060笔记本6G显存带不动,在大现存服务器上可以运行,可能是由于YOLOv7网络结构导致的,由于不具备普适性,就不再写相关文章了,有需要的可以仿照这个代码去改写
1. 相关配置
python==3.7
Windows-pycharm
zed api 具体配置见 (zed api 配置步骤)
由于我电脑之前python版本为3.7,yolov8要求python最低为3.8,所以本次实验直接在虚拟环境里进行,未配置gpu,可能看着卡卡的,有需要的可以配置一下,原理是一样的
2. 版本一
2.1 相关代码
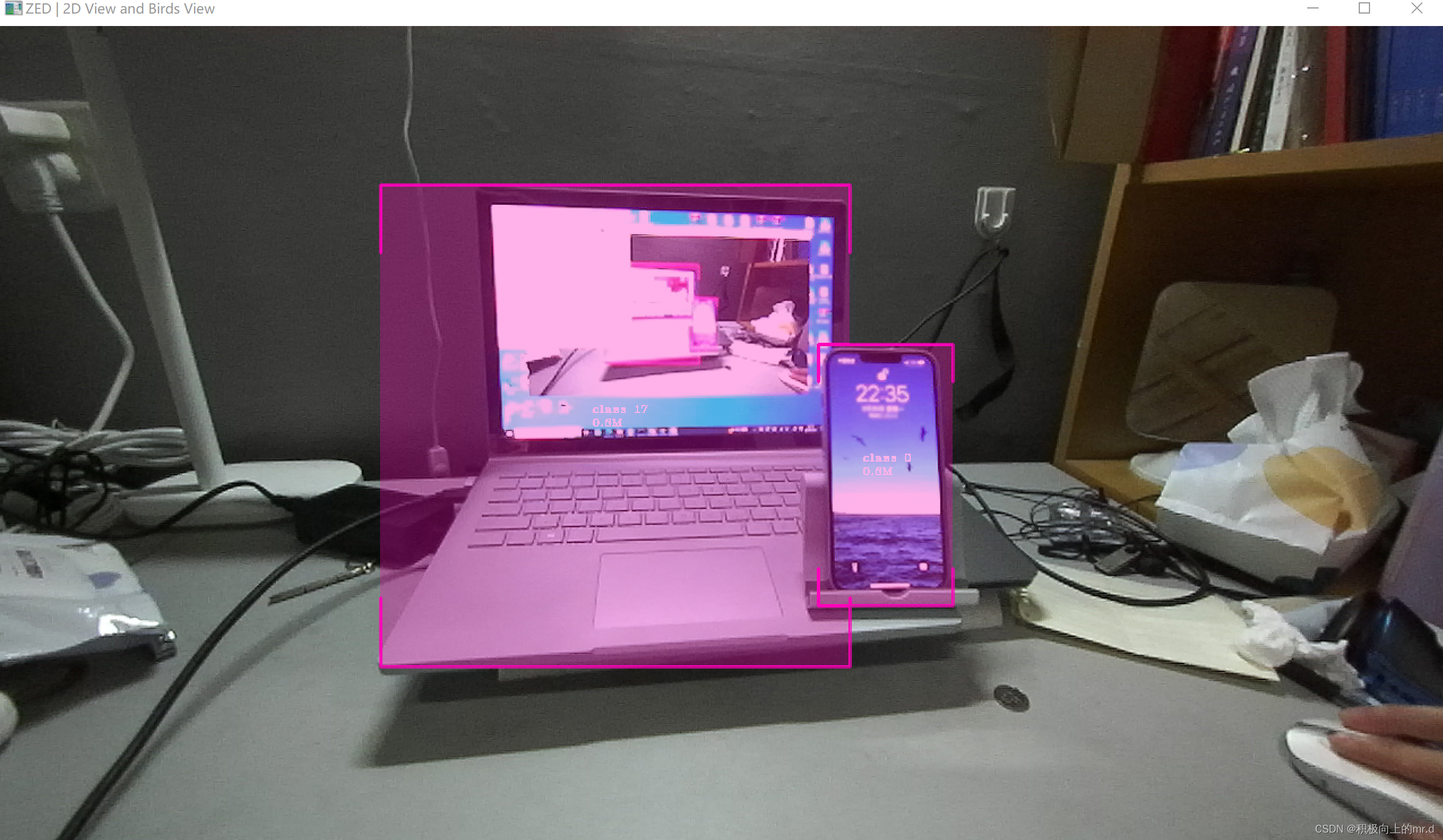
主代码 zed-yolo.py,具体放置在yolov8主目录下,盒子形式展现,可实现测距+跟踪
#!/usr/bin/env python3import sys
import numpy as npimport argparse
import torch
import cv2
import pyzed.sl as sl
from ultralytics import YOLOfrom threading import Lock, Thread
from time import sleepimport ogl_viewer.viewer as gl
import cv_viewer.tracking_viewer as cv_viewerlock = Lock()
run_signal = False
exit_signal = Falsedef xywh2abcd(xywh, im_shape):output = np.zeros((4, 2))# Center / Width / Height -> BBox corners coordinatesx_min = (xywh[0] - 0.5*xywh[2]) #* im_shape[1]x_max = (xywh[0] + 0.5*xywh[2]) #* im_shape[1]y_min = (xywh[1] - 0.5*xywh[3]) #* im_shape[0]y_max = (xywh[1] + 0.5*xywh[3]) #* im_shape[0]# A ------ B# | Object |# D ------ Coutput[0][0] = x_minoutput[0][1] = y_minoutput[1][0] = x_maxoutput[1][1] = y_minoutput[2][0] = x_maxoutput[2][1] = y_maxoutput[3][0] = x_minoutput[3][1] = y_maxreturn outputdef detections_to_custom_box(detections, im0):output = []for i, det in enumerate(detections):xywh = det.xywh[0]# Creating ingestable objects for the ZED SDKobj = sl.CustomBoxObjectData()obj.bounding_box_2d = xywh2abcd(xywh, im0.shape)obj.label = det.clsobj.probability = det.confobj.is_grounded = Falseoutput.append(obj)return outputdef torch_thread(weights, img_size, conf_thres=0.2, iou_thres=0.45):global image_net, exit_signal, run_signal, detectionsprint("Intializing Network...")model = YOLO(weights)while not exit_signal:if run_signal:lock.acquire()img = cv2.cvtColor(image_net, cv2.COLOR_BGRA2RGB)# https://docs.ultralytics.com/modes/predict/#video-suffixesdet = model.predict(img, save=False, imgsz=img_size, conf=conf_thres, iou=iou_thres)[0].cpu().numpy().boxes# ZED CustomBox format (with inverse letterboxing tf applied)detections = detections_to_custom_box(det, image_net)lock.release()run_signal = Falsesleep(0.01)def main():global image_net, exit_signal, run_signal, detectionscapture_thread = Thread(target=torch_thread, kwargs={'weights': opt.weights, 'img_size': opt.img_size, "conf_thres": opt.conf_thres})capture_thread.start()print("Initializing Camera...")zed = sl.Camera()input_type = sl.InputType()if opt.svo is not None:input_type.set_from_svo_file(opt.svo)# Create a InitParameters object and set configuration parametersinit_params = sl.InitParameters(input_t=input_type, svo_real_time_mode=True)init_params.coordinate_units = sl.UNIT.METERinit_params.depth_mode = sl.DEPTH_MODE.ULTRA # QUALITYinit_params.coordinate_system = sl.COORDINATE_SYSTEM.RIGHT_HANDED_Y_UPinit_params.depth_maximum_distance = 50runtime_params = sl.RuntimeParameters()status = zed.open(init_params)if status != sl.ERROR_CODE.SUCCESS:print(repr(status))exit()image_left_tmp = sl.Mat()print("Initialized Camera")positional_tracking_parameters = sl.PositionalTrackingParameters()# If the camera is static, uncomment the following line to have better performances and boxes sticked to the ground.# positional_tracking_parameters.set_as_static = Truezed.enable_positional_tracking(positional_tracking_parameters)obj_param = sl.ObjectDetectionParameters()
# obj_param.detection_model = sl.OBJECT_DETECTION_MODEL.CUSTOM_BOX_OBJECTSobj_param.enable_tracking = Truezed.enable_object_detection(obj_param)objects = sl.Objects()obj_runtime_param = sl.ObjectDetectionRuntimeParameters()# Displaycamera_infos = zed.get_camera_information()camera_res = camera_infos.camera_resolution# Create OpenGL viewerviewer = gl.GLViewer()point_cloud_res = sl.Resolution(min(camera_res.width, 720), min(camera_res.height, 404))point_cloud_render = sl.Mat()viewer.init(camera_infos.camera_model, point_cloud_res, obj_param.enable_tracking)point_cloud = sl.Mat(point_cloud_res.width, point_cloud_res.height, sl.MAT_TYPE.F32_C4, sl.MEM.CPU)image_left = sl.Mat()# Utilities for 2D displaydisplay_resolution = sl.Resolution(min(camera_res.width, 1280), min(camera_res.height, 720))image_scale = [display_resolution.width / camera_res.width, display_resolution.height / camera_res.height]image_left_ocv = np.full((display_resolution.height, display_resolution.width, 4), [245, 239, 239, 255], np.uint8)# # Utilities for tracks view# camera_config = camera_infos.camera_configuration# tracks_resolution = sl.Resolution(400, display_resolution.height)# track_view_generator = cv_viewer.TrackingViewer(tracks_resolution, camera_config.fps, init_params.depth_maximum_distance)# track_view_generator.set_camera_calibration(camera_config.calibration_parameters)# image_track_ocv = np.zeros((tracks_resolution.height, tracks_resolution.width, 4), np.uint8)# Camera posecam_w_pose = sl.Pose()while viewer.is_available() and not exit_signal:if zed.grab(runtime_params) == sl.ERROR_CODE.SUCCESS:# -- Get the imagelock.acquire()zed.retrieve_image(image_left_tmp, sl.VIEW.LEFT)image_net = image_left_tmp.get_data()lock.release()run_signal = True# -- Detection running on the other threadwhile run_signal:sleep(0.001)# Wait for detectionslock.acquire()# -- Ingest detectionszed.ingest_custom_box_objects(detections)lock.release()zed.retrieve_objects(objects, obj_runtime_param)# -- Display# Retrieve display datazed.retrieve_measure(point_cloud, sl.MEASURE.XYZRGBA, sl.MEM.CPU, point_cloud_res)point_cloud.copy_to(point_cloud_render)zed.retrieve_image(image_left, sl.VIEW.LEFT, sl.MEM.CPU, display_resolution)zed.get_position(cam_w_pose, sl.REFERENCE_FRAME.WORLD)# 3D renderingviewer.updateData(point_cloud_render, objects)# 2D renderingnp.copyto(image_left_ocv, image_left.get_data())cv_viewer.render_2D(image_left_ocv, image_scale, objects, obj_param.enable_tracking)global_image = image_left_ocv# global_image = cv2.hconcat([image_left_ocv, image_track_ocv])# # Tracking view# track_view_generator.generate_view(objects, cam_w_pose, image_track_ocv, objects.is_tracked)cv2.imshow("ZED | 2D View and Birds View", global_image)key = cv2.waitKey(10)if key == 27:exit_signal = Trueelse:exit_signal = Trueviewer.exit()exit_signal = Truezed.close()if __name__ == '__main__':parser = argparse.ArgumentParser()parser.add_argument('--weights', type=str, default='yolov8n.pt', help='model.pt path(s)')parser.add_argument('--svo', type=str, default=None, help='optional svo file')parser.add_argument('--img_size', type=int, default=416, help='inference size (pixels)')parser.add_argument('--conf_thres', type=float, default=0.4, help='object confidence threshold')opt = parser.parse_args()with torch.no_grad():main()2.2 实验结果
测距图(感觉挺精准的)
视频展示:
Zed相机+YOLOv8目标检测跟踪
3. 版本二
3.1 相关代码
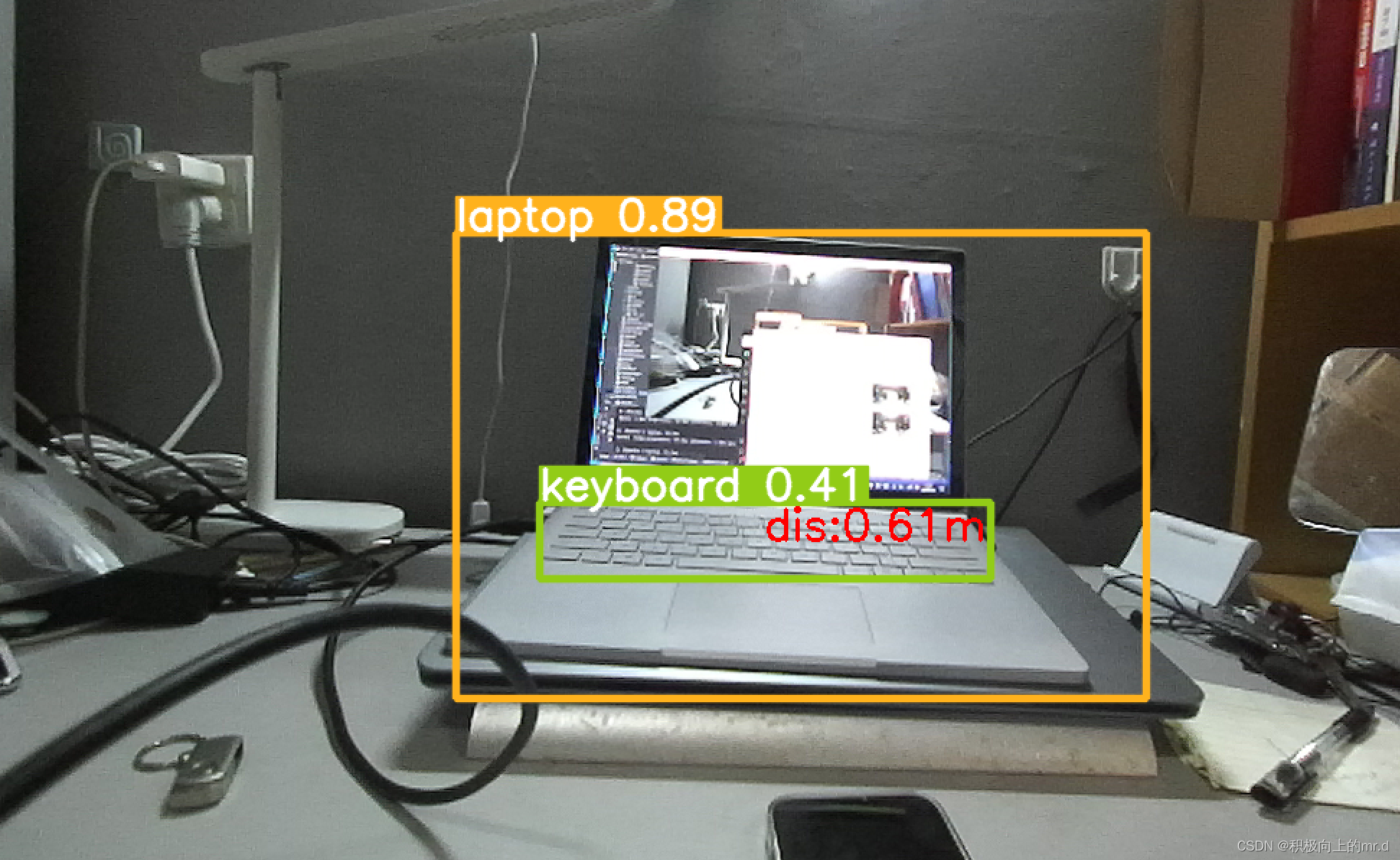
主代码 zed.py,具体放置在yolov8主目录下,可实现测距+跟踪+分割
#!/usr/bin/env python3
import math
import sys
import numpy as np
from PIL import Image
import argparse
import torch
import cv2
import pyzed.sl as sl
from ultralytics.utils.plotting import Annotator, colors, save_one_box
from ultralytics import YOLO
from threading import Lock, Thread
from time import sleepimport ogl_viewer.viewer as gl
import cv_viewer.tracking_viewer as cv_viewerzed = sl.Camera()# Create a InitParameters object and set configuration parameters
init_params = sl.InitParameters()
init_params.camera_resolution = sl.RESOLUTION.HD720
init_params.coordinate_units = sl.UNIT.METER
init_params.depth_mode = sl.DEPTH_MODE.ULTRA # QUALITY
init_params.coordinate_system = sl.COORDINATE_SYSTEM.RIGHT_HANDED_Y_UP
init_params.depth_maximum_distance = 20 # 设置最远距离runtime_params = sl.RuntimeParameters()
status = zed.open(init_params)if status != sl.ERROR_CODE.SUCCESS:print(repr(status))exit()image_left_tmp = sl.Mat()
print("Initialized Camera")
positional_tracking_parameters = sl.PositionalTrackingParameters()
zed.enable_positional_tracking(positional_tracking_parameters)obj_param = sl.ObjectDetectionParameters()
obj_param.detection_model = sl.DETECTION_MODEL.CUSTOM_BOX_OBJECTS
obj_param.enable_tracking = True
zed.enable_object_detection(obj_param)
objects = sl.Objects()
obj_runtime_param = sl.ObjectDetectionRuntimeParameters()point_cloud_render = sl.Mat()
point_cloud = sl.Mat()
image_left = sl.Mat()
depth = sl.Mat()
# Utilities for 2D display
if __name__ == '__main__':model = YOLO("./yolov8n.pt")while True:if zed.grab(runtime_params) == sl.ERROR_CODE.SUCCESS:# -- Get the imagezed.retrieve_image(image_left_tmp, sl.VIEW.LEFT)image_net = image_left_tmp.get_data()zed.retrieve_measure(depth, sl.MEASURE.DEPTH)zed.retrieve_measure(point_cloud, sl.MEASURE.XYZRGBA)img = cv2.cvtColor(image_net, cv2.COLOR_BGRA2BGR)result = model.predict(img, conf=0.5)annotated_frame = result[0].plot()boxes = result[0].boxes.xywhfor i, box in enumerate(boxes):x_center, y_center, width, height = box.tolist()point_cloud_value = point_cloud.get_value(x_center, y_center)[1]point_cloud_value = point_cloud_value * -1000.00if point_cloud_value[2] > 0.00:try:point_cloud_value[0] = round(point_cloud_value[0])point_cloud_value[1] = round(point_cloud_value[1])point_cloud_value[2] = round(point_cloud_value[2])distance = math.sqrt(point_cloud_value[0] * point_cloud_value[0] + point_cloud_value[1] *point_cloud_value[1] +point_cloud_value[2] * point_cloud_value[2])print(distance)dis = []dis.append(distance)text = "dis:%0.2fm" % distancecv2.putText(annotated_frame, text, (int(x_center), int(y_center)),cv2.FONT_ITALIC, 1.0, (0, 0, 255), 2)except:passcv2.imshow('00', annotated_frame)key = cv2.waitKey(1)if key == 'q':breakzed.retrieve_objects(objects, obj_runtime_param)zed.retrieve_image(image_left, sl.VIEW.LEFT)zed.close()
3.2 实验结果
可实现测距、跟踪和分割功能,这个代码没有加多线程,速度够用懒得写了,对速率要求高的可以自己写一下,实现不同功能仅需修改以下代码,具体见 此篇文章
model = YOLO("./yolov8n.pt")img = cv2.cvtColor(image_net, cv2.COLOR_BGRA2BGR)result = model.predict(img, conf=0.5)
测距功能
跟踪功能

分割功能

视频展示
相关文章:
yolov8直接调用zed相机实现三维测距(python)
yolov8直接调用zed相机实现三维测距(python) 1. 相关配置2. 版本一2.1 相关代码2.2 实验结果 3. 版本二3.1 相关代码3.2 实验结果 相关链接 此项目直接调用zed相机实现三维测距,无需标定,相关内容如下: 1.yolov5直接调…...

element跑马灯/轮播图,第一页隐藏左边按钮,最后一页隐藏右边按钮(vue 开箱即用)
图示: 第一步: <el-carousel :class"changeIndex0?leftBtnNone:changeIndeximgDataList.length-1? rightBtnNone:" height"546px" :autoplay"false" change"changeNext"><el-carousel-item v-for…...

下载及安装PHP,composer,phpstudy,thinkPHP6.0框架
文章目录 目录 文章目录 前言 一、下载PHP 二、下载composer 三、下载PHPstudy 四、下载think PHP 1.下载 2.多应用开发 前言 thinkPHP是一款开源的PHP框架,它是基于MVC(Model-View-Controller)设计模式构建的。thinkPHP提供了丰富的…...

volatile使用场景总结
volatile关键字在Java中用于确保变量的可见性以及防止指令重排序,特别是在没有使用锁定机制时对变量进行读写的多线程环境中。以下是需要使用volatile修饰的一些场景: 确保变量的可见性 当一个变量被多个线程访问,且至少有一个线程在写&…...

AcWing 1413. 矩形牛棚(每日一题)
原题链接:1413. 矩形牛棚 - AcWing题库 作为一个资本家,农夫约翰希望通过购买更多的奶牛来扩大他的牛奶业务。 因此,他需要找地方建立一个新的牛棚。 约翰购买了一大块土地,这个土地可以看作是一个 R 行(编号 1∼R&…...

macOS Sonoma 14.4.1 (23E224) 正式版发布,ISO、IPSW、PKG 下载
macOS Sonoma 14.4.1 (23E224) 正式版发布,ISO、IPSW、PKG 下载 2024 年 3 月 26 日凌晨,macOS Sonoma 14.4.1 更新修复了一个可能导致连接到外部显示器的 USB 集线器无法被识别的问题。它还解决了可能导致 Java 应用程序意外退出的问题,并修…...
WPF使用外部字体,思源黑体,为例子
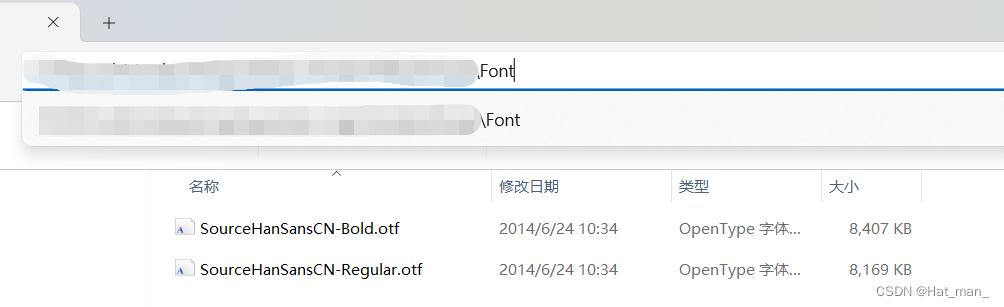
1.在工程中新建文件夹,命名为“Font"。 2.将下载好的字体文件复制到Font文件夹。 3.在工程中,加入静态资源 <Window.Resources><FontFamily x:Key"SYBold">/AnalyzeImage;Component/Font/#思源黑体 CN Bold</FontFamily…...
9、jenkins微服务持续集成(一)
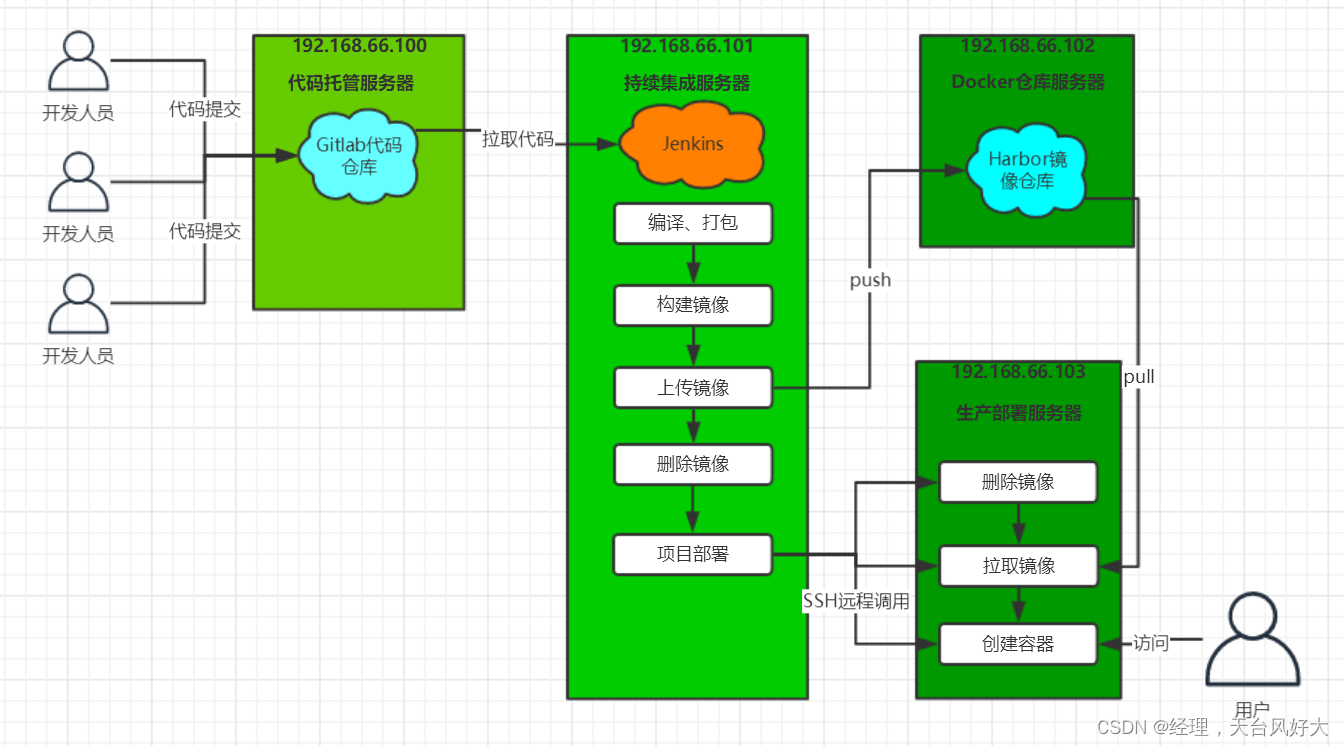
文章目录 一、流程说明二、源码概述三、本地部署3.1 SpringCloud微服务部署本地运行微服务本地部署微服务3.2 静态Web前端部署四、Docker快速入门一、流程说明 Jenkins+Docker+SpringCloud持续集成流程说明 大致流程说明: 开发人员每天把代码提交到Gitlab代码仓库Jenkins从G…...

VOC(客户之声)赋能智能家居:打造个性化、交互式的未来生活体验
随着科技的飞速发展,智能家居已成为现代家庭不可或缺的一部分。然而,如何让智能家居更好地满足用户需求,提供更贴心、更智能的服务,一直是行业关注的焦点。在这个背景下,VOC(客户之声)作为一种用…...

时序预测 | Matlab实现GWO-BP灰狼算法优化BP神经网络时间序列预测
时序预测 | Matlab实现GWO-BP灰狼算法优化BP神经网络时间序列预测 目录 时序预测 | Matlab实现GWO-BP灰狼算法优化BP神经网络时间序列预测预测效果基本介绍程序设计参考资料 预测效果 基本介绍 1.Matlab实现GWO-BP灰狼算法优化BP神经网络时间序列预测(完整源码和数据…...

node.js学习(2)
版权声明 以下文章为尚硅谷PDF资料,B站视频链接:【尚硅谷Node.js零基础视频教程,nodejs新手到高手】仅供个人学习交流使用。如涉及侵权问题,请立即与本人联系,本人将积极配合删除相关内容。感谢理解和支持,…...

【pytest】测试数据存储在 Excel 或 TXT 文件中,如何参数化
如果测试数据存储在 Excel 或 TXT 文件中,你可以使用外部库来读取这些数据,并将其转化为参数化测试所需的格式。下面我将分别展示如何从这两种文件中读取数据,并用于参数化测试。 从 Excel 文件中读取测试数据 你可以使用 pandas 库来读取 …...
ubuntu22.04@Jetson Orin Nano安装配置VNC服务端
ubuntu22.04Jetson Orin Nano安装&配置VNC服务端 1. 源由2. 环境3. VNC安装Step 1: update and install xserver-xorg-video-dummyStep 2: Create config for dummy virtual displayStep3: Add the following contents in xorg.conf.dummyStep 4: Update /etc/X11/xorg.con…...
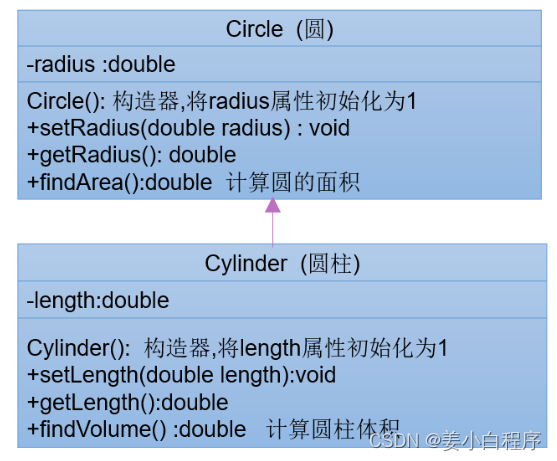
面向对象特征二:继承
继承的概述 生活中的继承 财产继承: 绿化:前人栽树,后人乘凉 “绿水青山,就是金山银山” 样貌: 继承之外,是不是还可以"进化": 继承有延续(下一代延续上一代的基因、财…...

宝塔面板CentOS Stream 8 x86 下如何安装openlitespeed
宝塔自带的软件商店里如果没办法安装,那么我们可以通过指令来手动安装: 第一步: yum install epel-release Package epel-release-8-19.el8.noarch is already installed. Dependencies resolved. Nothing to do. Complete! 第二步&#…...
)
LeetCode 2952.需要添加的硬币的最小数量:贪心(排序)
【LetMeFly】2952.需要添加的硬币的最小数量:贪心(排序) 力扣题目链接:https://leetcode.cn/problems/minimum-number-of-coins-to-be-added/ 给你一个下标从 0 开始的整数数组 coins,表示可用的硬币的面值ÿ…...
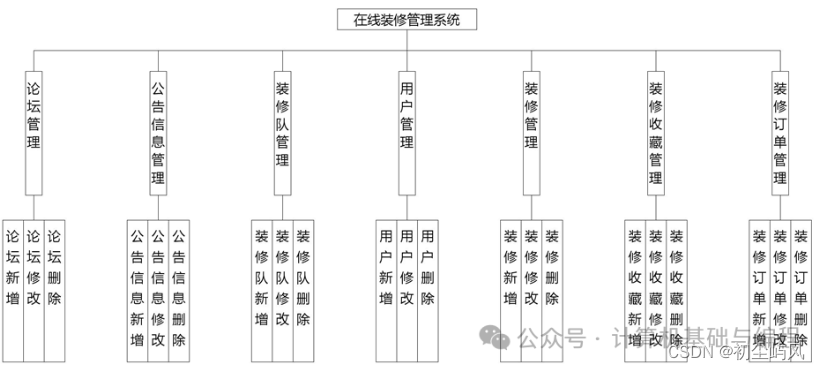
基于SpringBoot + Vue实现的在线装修管理系统设计与实现+毕业论文
介绍 系统包含用户、装修队、管理员三个角色 管理员: 管理员管理:管理其他管理员的账号和权限,确保系统管理的层次化和安全性。 装修队管理:审核装修队的资质,管理装修队的人员信息,监控工程进度ÿ…...

阿里云安全产品简介,Web应用防火墙与云防火墙产品各自作用介绍
在阿里云的安全类云产品中,Web应用防火墙与云防火墙是用户比较关注的安全类云产品,二则在作用上并不是完全一样的,Web应用防火墙是一款网站Web应用安全的防护产品,云防火墙是一款公共云环境下的SaaS化防火墙,本文为大家…...

作业 二维数组-定位问题
图形相似度 描述 给出两幅相同大小的黑白图像(用0-1矩阵)表示,求它们的相似度。 说明:若两幅图像在相同位置上的像素点颜色相同,则称它们在该位置具有相同的像素点。 两幅图像的相似度定义为相同像素点数占总像素点数…...
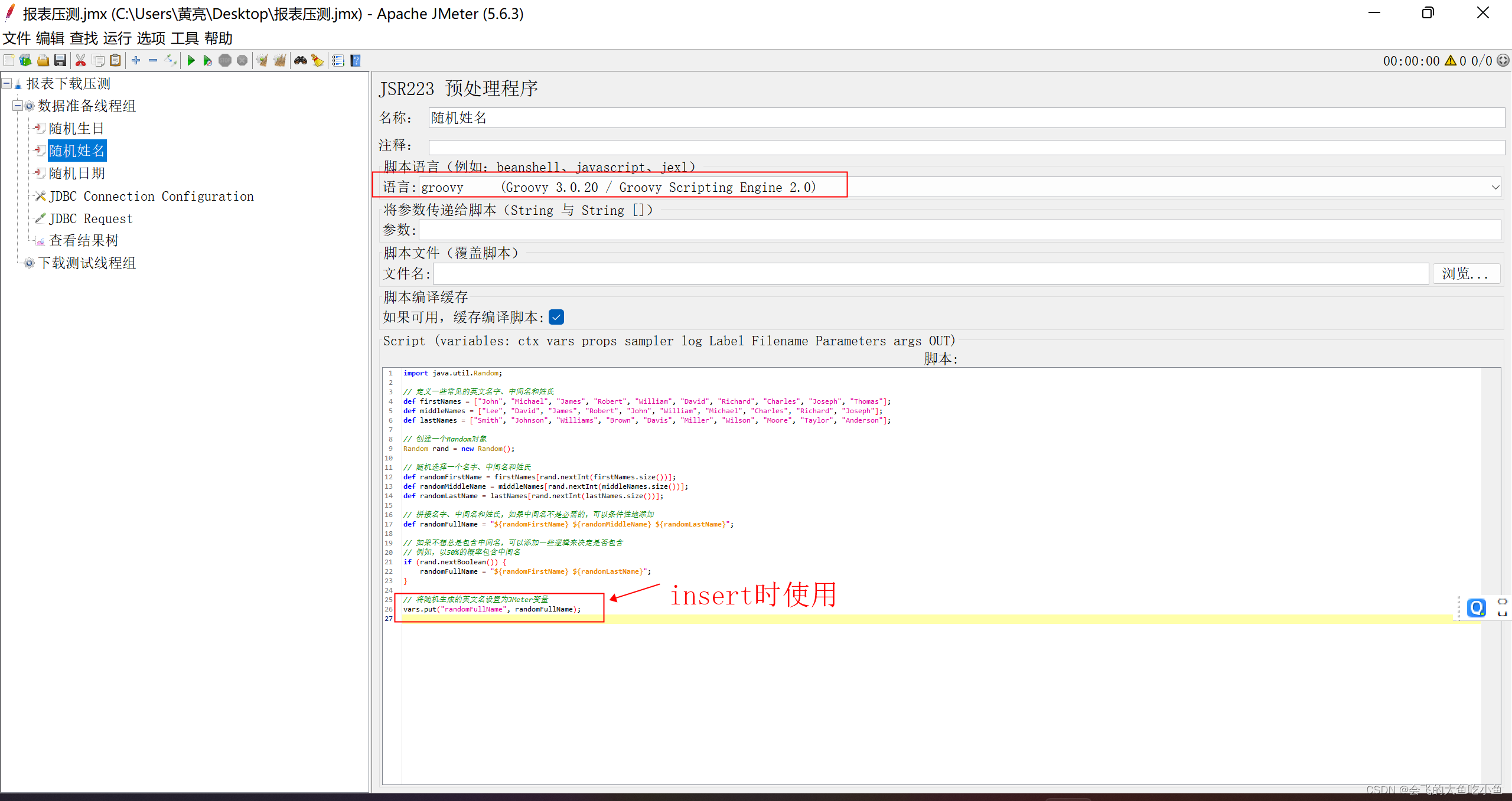
通过Jmeter准备压测数据-mysql示例
1、新建线程组 总共30万条数据 2、创建jdbc链接 创建jdbc连接配置 配置mysql连接 需要在jmeter安装的路径\apache-jmeter-5.6.3\lib\ext 目录下添加mysql 驱动 3、创建jdbc请求 jdbc链接名称需要与上一步中的保持一致,同时添加insert语句 例如 INSERT INTO test…...
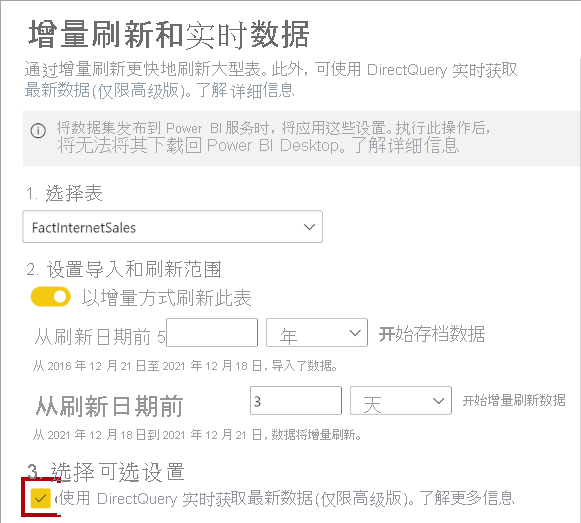
微软PowerBI考试 PL300-选择 Power BI 模型框架【附练习数据】
微软PowerBI考试 PL300-选择 Power BI 模型框架 20 多年来,Microsoft 持续对企业商业智能 (BI) 进行大量投资。 Azure Analysis Services (AAS) 和 SQL Server Analysis Services (SSAS) 基于无数企业使用的成熟的 BI 数据建模技术。 同样的技术也是 Power BI 数据…...

Admin.Net中的消息通信SignalR解释
定义集线器接口 IOnlineUserHub public interface IOnlineUserHub {/// 在线用户列表Task OnlineUserList(OnlineUserList context);/// 强制下线Task ForceOffline(object context);/// 发布站内消息Task PublicNotice(SysNotice context);/// 接收消息Task ReceiveMessage(…...

java 实现excel文件转pdf | 无水印 | 无限制
文章目录 目录 文章目录 前言 1.项目远程仓库配置 2.pom文件引入相关依赖 3.代码破解 二、Excel转PDF 1.代码实现 2.Aspose.License.xml 授权文件 总结 前言 java处理excel转pdf一直没找到什么好用的免费jar包工具,自己手写的难度,恐怕高级程序员花费一年的事件,也…...
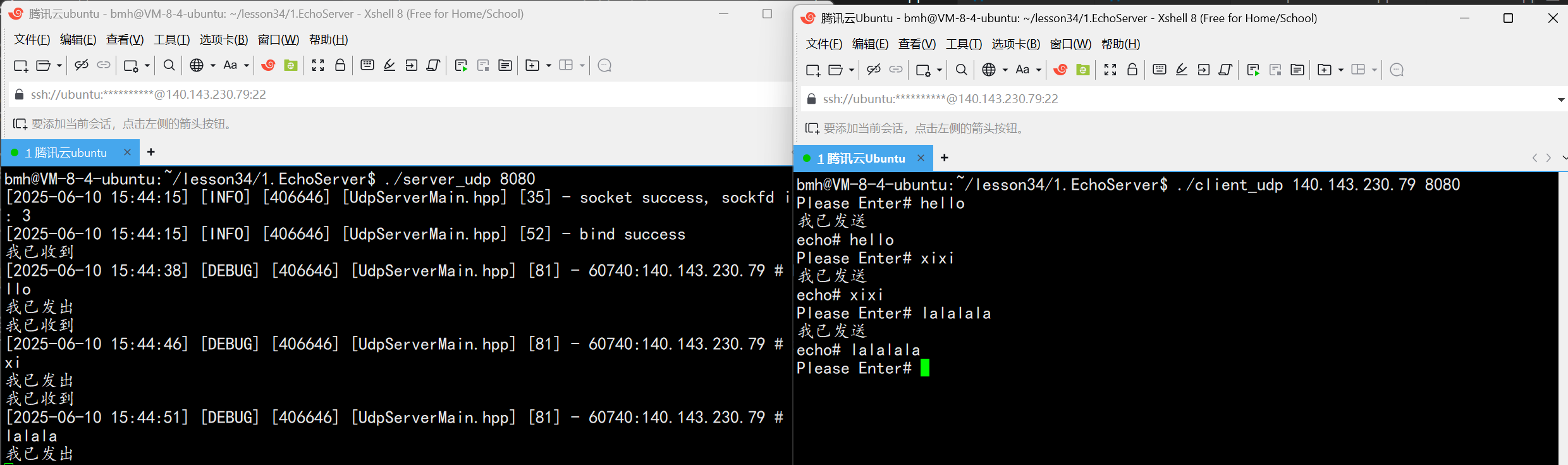
UDP(Echoserver)
网络命令 Ping 命令 检测网络是否连通 使用方法: ping -c 次数 网址ping -c 3 www.baidu.comnetstat 命令 netstat 是一个用来查看网络状态的重要工具. 语法:netstat [选项] 功能:查看网络状态 常用选项: n 拒绝显示别名&#…...

大语言模型如何处理长文本?常用文本分割技术详解
为什么需要文本分割? 引言:为什么需要文本分割?一、基础文本分割方法1. 按段落分割(Paragraph Splitting)2. 按句子分割(Sentence Splitting)二、高级文本分割策略3. 重叠分割(Sliding Window)4. 递归分割(Recursive Splitting)三、生产级工具推荐5. 使用LangChain的…...
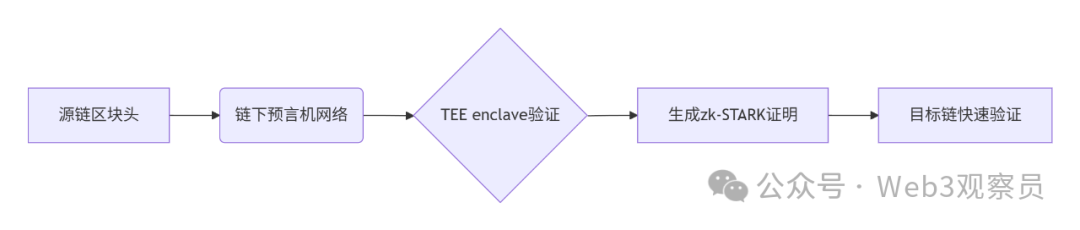
跨链模式:多链互操作架构与性能扩展方案
跨链模式:多链互操作架构与性能扩展方案 ——构建下一代区块链互联网的技术基石 一、跨链架构的核心范式演进 1. 分层协议栈:模块化解耦设计 现代跨链系统采用分层协议栈实现灵活扩展(H2Cross架构): 适配层…...

数据库分批入库
今天在工作中,遇到一个问题,就是分批查询的时候,由于批次过大导致出现了一些问题,一下是问题描述和解决方案: 示例: // 假设已有数据列表 dataList 和 PreparedStatement pstmt int batchSize 1000; // …...

优选算法第十二讲:队列 + 宽搜 优先级队列
优选算法第十二讲:队列 宽搜 && 优先级队列 1.N叉树的层序遍历2.二叉树的锯齿型层序遍历3.二叉树最大宽度4.在每个树行中找最大值5.优先级队列 -- 最后一块石头的重量6.数据流中的第K大元素7.前K个高频单词8.数据流的中位数 1.N叉树的层序遍历 2.二叉树的锯…...

docker 部署发现spring.profiles.active 问题
报错: org.springframework.boot.context.config.InvalidConfigDataPropertyException: Property spring.profiles.active imported from location class path resource [application-test.yml] is invalid in a profile specific resource [origin: class path re…...

QT3D学习笔记——圆台、圆锥
类名作用Qt3DWindow3D渲染窗口容器QEntity场景中的实体(对象或容器)QCamera控制观察视角QPointLight点光源QConeMesh圆锥几何网格QTransform控制实体的位置/旋转/缩放QPhongMaterialPhong光照材质(定义颜色、反光等)QFirstPersonC…...