机器人寻路算法双向A*(Bidirectional A*)算法的实现C++、Python、Matlab语言
机器人寻路算法双向A*(Bidirectional A*)算法的实现C++、Python、Matlab语言
最近好久没更新,在搞华为的软件挑战赛(软挑),好卷只能说。去年还能混进32强,今年就比较迷糊了,这东西对我来说主要还是看运气,毕竟没有实力哈哈哈。
但是,好歹自己吭哧吭哧搞了两周,也和大家分享一下自己的收获吧,希望能为后来有需要的同学提供一些帮助。
我其实不太了解寻路算法的,很多代码也是找的demo自己改的,非常感谢这些大佬的帮助,有些引用可能现在也找不太到了,列不出来,非常感谢万能网友的代码,在此一起感谢啦!部分参考如下:
A*算法路径规划之Matlab实现
A算法路径规划博文附件1.zip
基于matlab的双向A*算法
【路径规划】A*算法方法改进思路简析
等等等
代码和运行资源下载:机器人寻路算法双向A*(Bidirectional A*)算法的实现C++、Python、Matlab语言
目录
- 机器人寻路算法双向A*(Bidirectional A*)算法的实现C++、Python、Matlab语言
- 1、基于Matlab的双向A*寻路算法
- 1.1、基本地图
- 1.2、非联通区域的地图处理
- 1.3、双向A*寻路算法Matlab实现
- 1.4、双向A*寻路算法的加速小TIPS
- 1.5、现存的问题
- 2、双向A*寻路算法的C++实现
- 2.1、在C++得到类似结果
- 2.2、得到最大联通区域地图
- 2.3、有限时间的寻路计算
- 2.4、使用历史路网结构
- 2.5、中转站机制
- 2.6、一坨稀烂的机器人防碰撞
- 2.7、提前规划路径
- 2.8、运行前修改main.h的日志导出路径,不然报错
- 3、双向A*寻路算法的python实现
1、基于Matlab的双向A*寻路算法
C++的代码也是用Matlab导出的,因此实现的功能是相近的。
1.1、基本地图
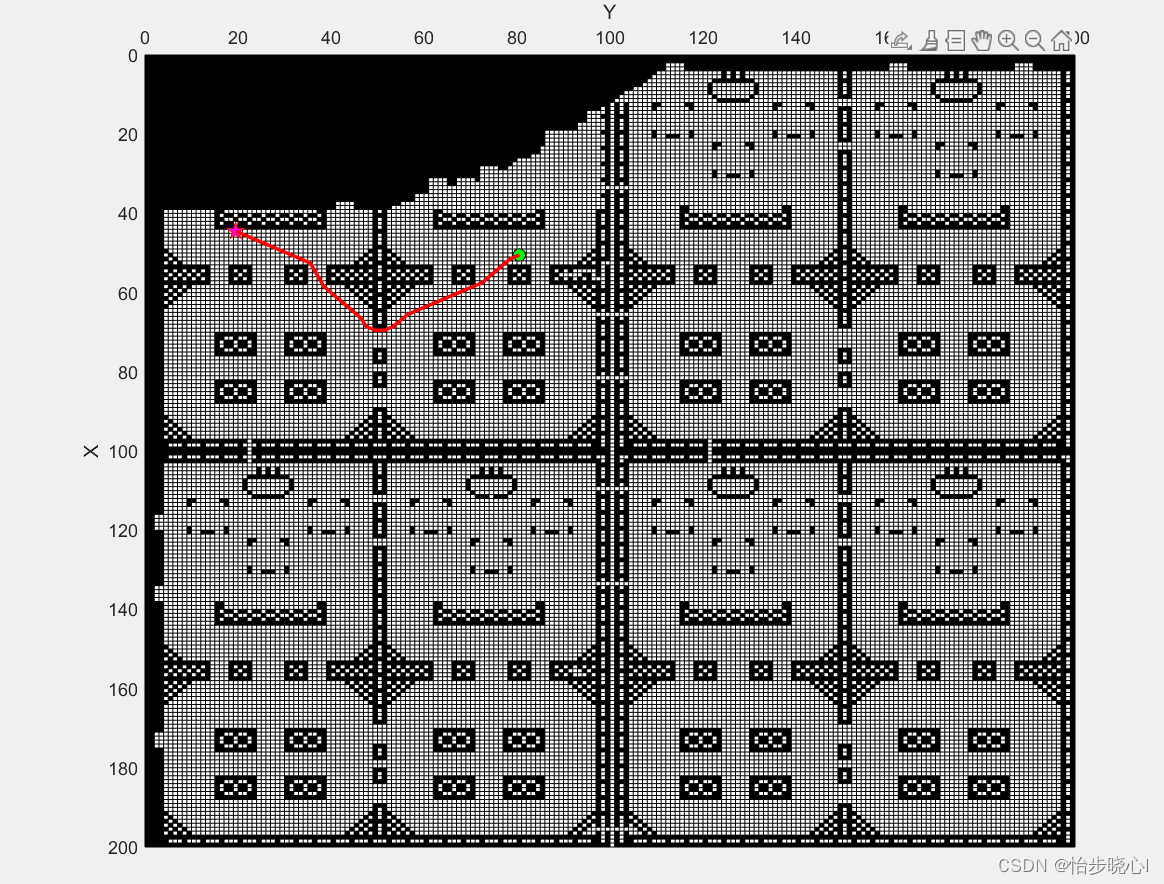
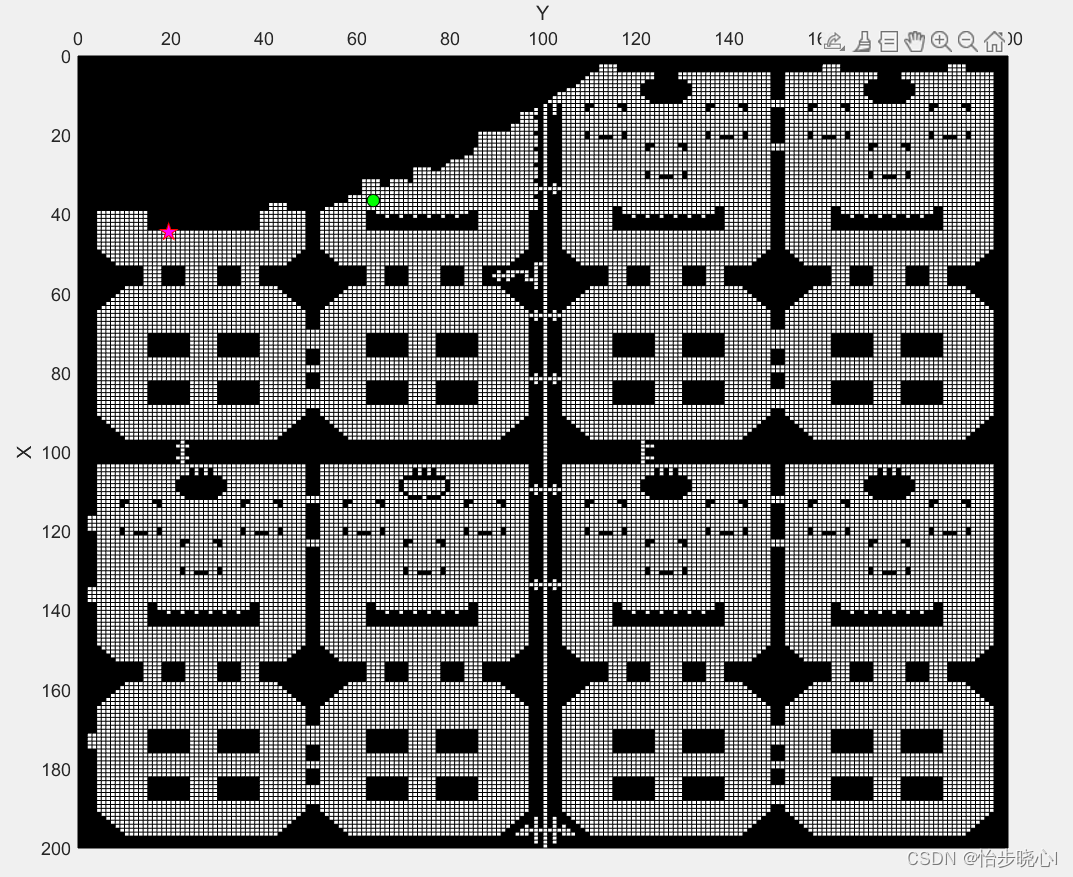
这是我主要改的地方,C++的代码也是用这个Matlab导出去的。首先就是读入地图数据,华为任务书里面写了对应的格式。给出的地图原始格式为txt,有200行200列,代表200*200的地图(第一行代表横坐标为0,纵坐标为0-199,以此类推),海洋和障碍是不能走的地方,泊位、空地都是能够行走的。

在实际的地图中,我们只考虑实际的空地和障碍,实际的空地包括泊位、空地,实际的障碍包括海洋和障碍,得到的地图如下所示:
地图的读取主要使用了下面的核心代码:
%% 双向A星24域
% 读入的sign就是对应的格子图
[sign] = readHWmap('map1.txt');
% 定义地图的宽
row=200;
col=200;
% 寻路的起点和终点坐标
start_xy=[44 19];
end_xy=[50 80];
1.2、非联通区域的地图处理
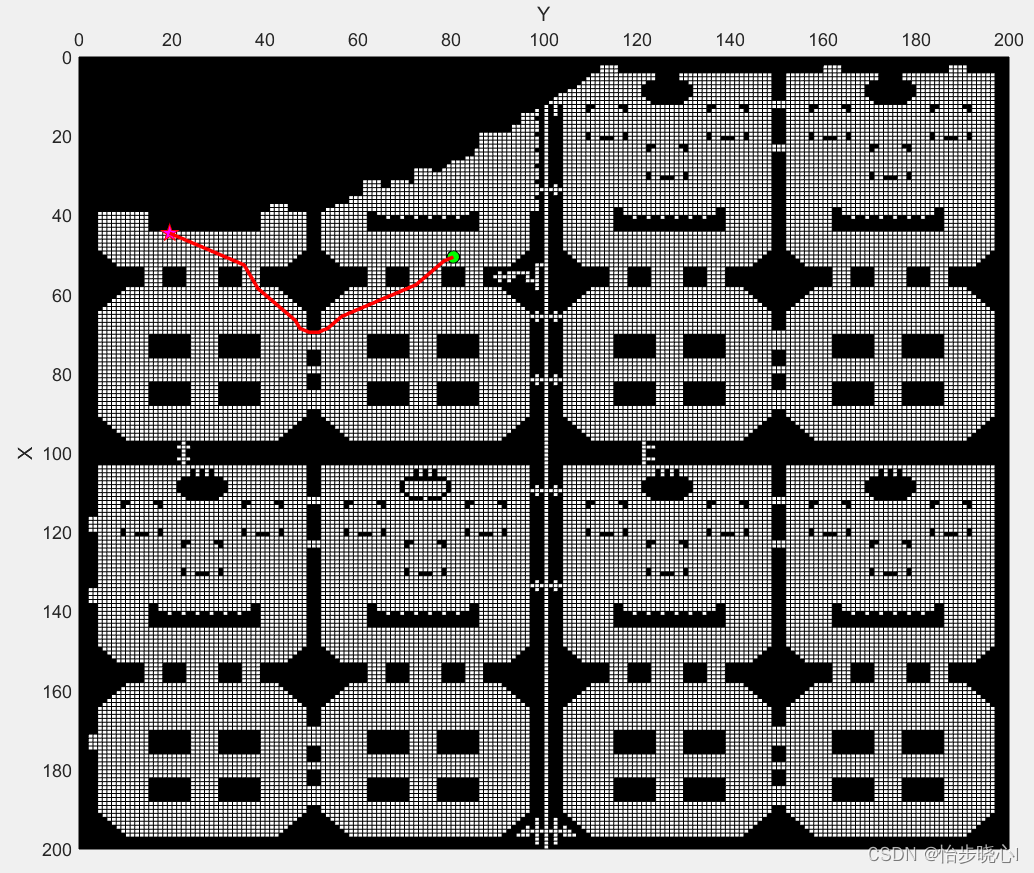
值得注意的是,上面地图中有些空地是被障碍物包围的,因此无法到达。因此我对初始地图进行了处理,获得最大的联通区域(使用搜索算法)。这一步可以在地图初始化的时候进行:
% 得到和坐标【66,66】相连的大联通区域,避免不可达到的空地影响
[sign,area]=getAllOb(sign,66,66);
处理后得到的地图如下所示,可以看到不可抵达的空地全部使用障碍来填充了:
1.3、双向A*寻路算法Matlab实现
A*算法是一种传统的路径规划算法,相较于Dijkstra算法,其引入了启发式算子,有效的提高了路径的搜索效率。主要步骤包括:
1)设置起始点、目标点以及带障碍物的栅格地图
2)选择当前节点的可行后继节点加入到openlist中
3)从openlist中选择成本最低的节点加入closelist节点
4)重复执行步骤2和步骤3,直到当前节点到达目标点,否则地图中不存在可行路径
5)从closelist中选择从起点到终点的路径,并画图展示
传统A* 算法从起点开始搜索,而双向A*从起点和终点同时开始搜索,所以运算速度会大大加快。以华为的地图为例,按照下面设置起点和终点:
% 寻路的起点和终点坐标
start_xy=[44 19];
end_xy=[50 80];
最终得到的结果如下所示:
1.4、双向A*寻路算法的加速小TIPS
1、扩展邻域法
扩展邻域法的思想是通过提高单次邻域的搜索范围,从而减少整个过程中的搜索次数,从而降低计算量。此处实现使用的是24邻域。
但是24邻域和此处网格机器人不太一样,网格机器人只能上下左右移动,所以从物理上看只能有四邻域。使用24邻域能够加快搜索速度,但是在实际控制时需要额外的判断。
因此,我在实际实现时是使用双向Astar算法得到关键的路径节点,但是机器人的实际行动是用Astar算法控制的。因为双向Astar算法得到的节点之间的距离都非常近,在此基础上使用A*算法进行二次寻路和避障速度比较快(把其他机器人当成障碍物来避障)。
2、有限区域初始化搜索
我们知道地图时非常大的,每次进行Astar算法的搜索都要进行很多的数组的初始化。按照此处的地图大小,是200*200的,一共有40000个数据。
所以在实际搜索时,我先依据起点和终点的位置,并留出一定的余量,从大地图中剥离出一个小地图,在这个小地图中进行搜索,这样速度会提升20-50%左右吧,起点和终点横跨的区域越小,这样做的优势就越明显。
实际实现留出的余量是这个参数:
% 在有些区域内使用算法加快速度,起点终点所含区域向外衍生20格,改为200则使用全局寻路
area_shift=20;
1.5、现存的问题
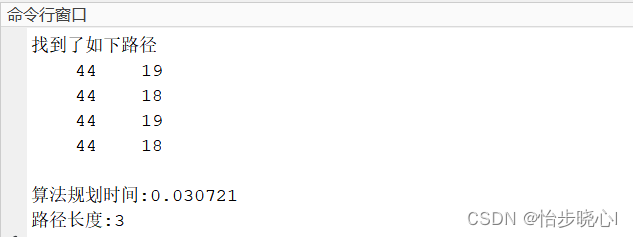
1、距离为1时进行搜索会抖动
但是我实际使用时发现在特别短的距离下寻路效果不好,会出现抖动的情况(不知道是不是代码问题),虽然长距离运算速度确实不错,例如我起点和终点的距离只差一格:
%% 双向A星24域
% 读入的sign就是对应的格子图
[sign] = readHWmap('map1.txt');
% 定义地图的宽
row=200;
col=200;
% 寻路的起点和终点坐标
start_xy=[44 19];
end_xy=[44 18];
得到的结果抖的不行,这是因为寻路是双向进行的,因此得到的最短的路径长度也是2,非常难受(但是只差1格感觉可以不用寻路了哈哈哈):
2、奇奇怪怪的点无法搜索得出路径
如果起点和终点弯弯绕绕,那么寻路算法最终会失败。这和路径的长短没有关系,而是看之间寻路的角度,这个现象非常奇怪,照理说Astar算法是100%可以寻到路径的,但是某项情况就是不行。我也试了一些其他的代码,都会寻路失败,C++代码里面也是这样,例如这样的:
% 寻路的起点和终点坐标
start_xy=[44 19];
end_xy=[36 63];
2、双向A*寻路算法的C++实现
此处我是使用Matlab的Coder Generater产生的C++代码,功能是一致的,简单介绍一下调试的流程和小小的优化。
2.1、在C++得到类似结果
正常来说,调用地图数据是软挑配套的脚本提供的,但是为了调试需要,我直接把地图1的数据存入C文件,这样可以直接debug调用了。
debug时,没有输入和输出内容,因此需要在和官方判题器交互之前打上断点,debug的内容在sys_fun.cpp中实现。
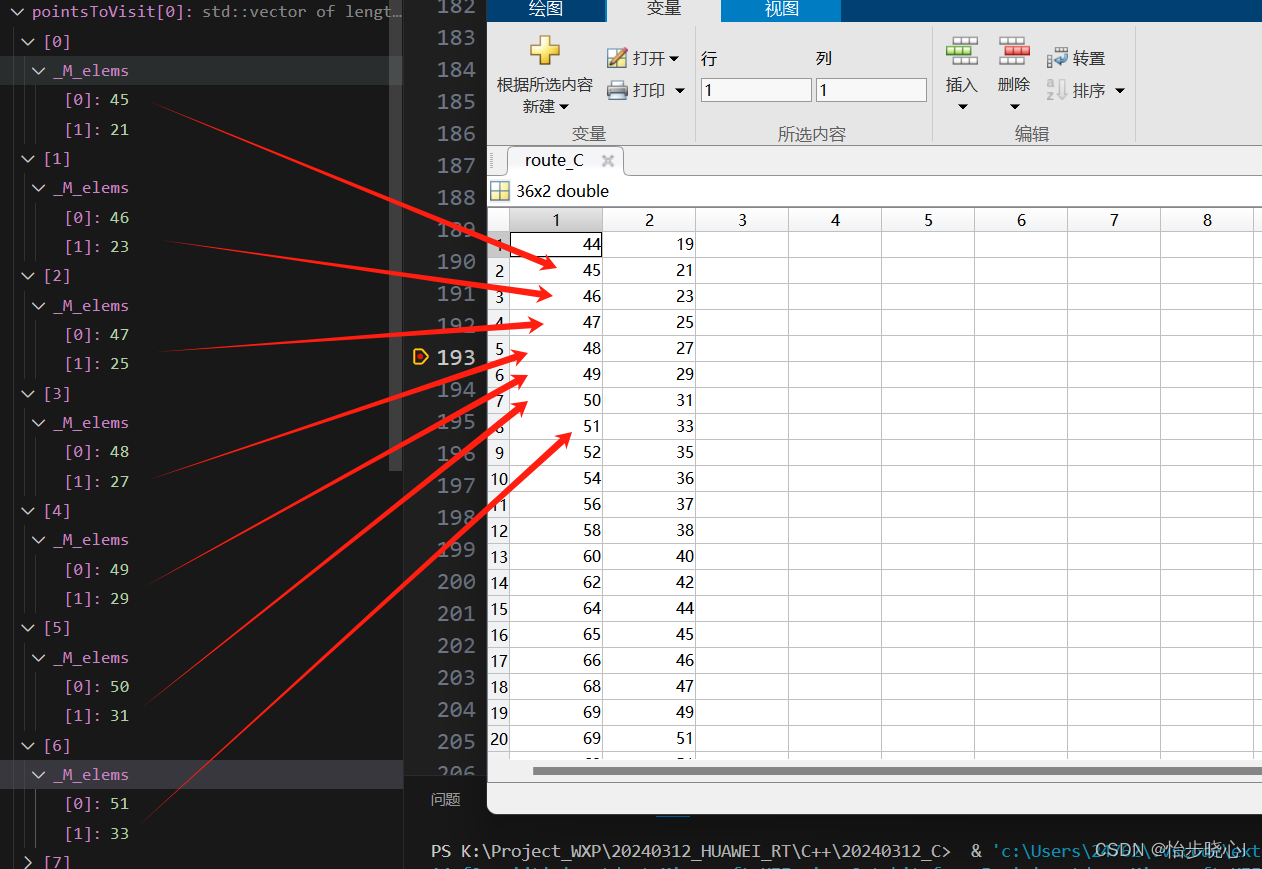
简单的测试代码如下,寻路结果保存在pointsToVisit[0]中:
std::vector<std::vector<int>> mapdata_matrix_tmp(SIZE_MAP, std::vector<int>(SIZE_MAP, 0));signed char mapdata_vector_tmp[SIZE_MAP*SIZE_MAP];findRouteOKFlag=FLAG_END;// 得到最大联通区域getAllOb(map1_test, 66, 66, mapFindRouteAStat, obstaclesCoords);// mapFindRouteAStat转化为二维地图数组int index111 = 0;for (int i = 0; i < SIZE_MAP; ++i) {for (int j = 0; j < SIZE_MAP; ++j) {Map1_2D_Bit[j][i] = mapFindRouteAStat[index111];Map1_2D_Char[j][i] = mapFindRouteAStat[index111];index111++;}}// 得到地图所有障碍的索引find_nonzero_indices(mapFindRouteAStat, map_Ind1, map_Ind2);// 历史路网数据复位initRouteMemory();//下面一行打开则使用历史的路网结构// loadRouteMemory();//定义起点和终点,寻路结果保存在pointsToVisit[0]int start_xy_int[] = {44,19};int end_xy_int[] = {50,80};RobotTowardResource destination;destination.x = end_xy_int[0];destination.y = end_xy_int[1];robotDestinations[0].push_back(destination);getRoutePath(start_xy_int, end_xy_int,0);if(!myFindRouteTask.empty()){float start_xy[2]={myFindRouteTask[0][0],myFindRouteTask[0][1]};float end_xy[2]={myFindRouteTask[0][2],myFindRouteTask[0][3]};//初始化任务findroute_limit_Init(start_xy,end_xy, 20, SIZE_MAP, SIZE_MAP,myFindRouteTask[0][4]);myFindRouteTask.erase(myFindRouteTask.begin());}while(findRouteOKFlag==FLAG_RUNNING){findroute_limit(mapFindRouteAStat, map_Ind1,map_Ind2, route_debug, &dis);}
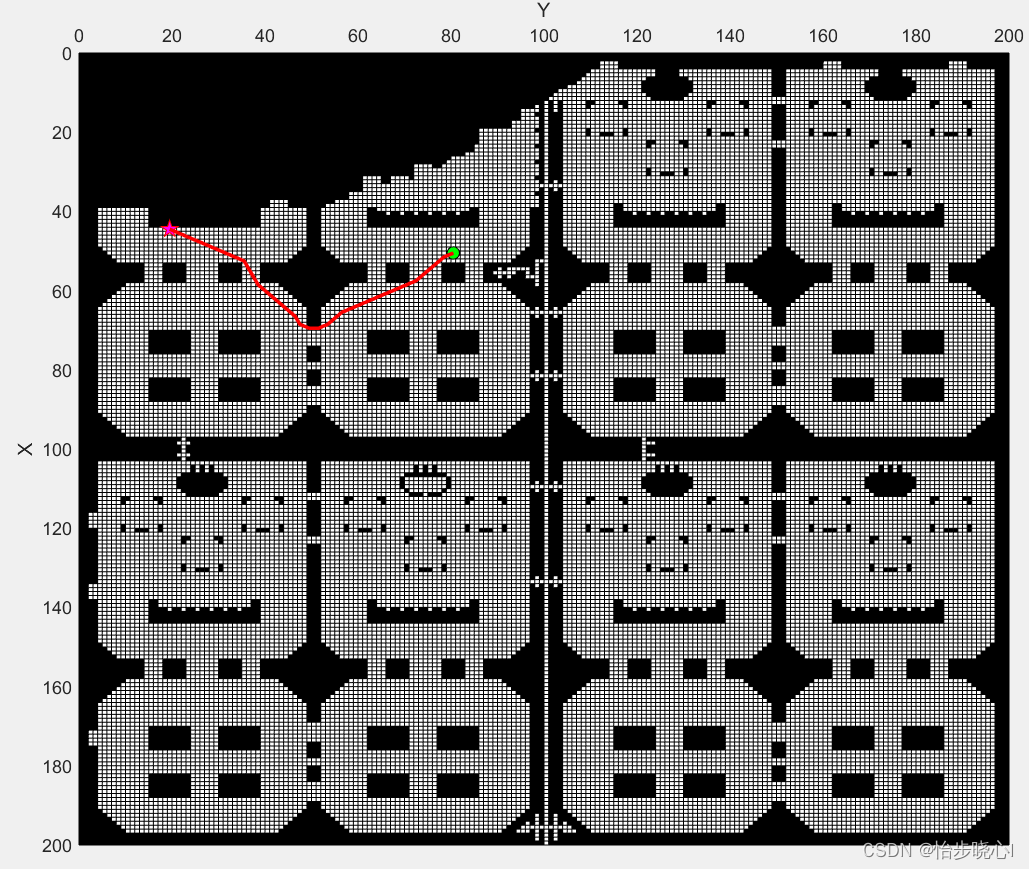
可以看到得到的结果和Matlab中的一致。
2.2、得到最大联通区域地图
值得注意的是,上面地图中有些空地是被障碍物包围的,因此无法到达。因此我对初始地图进行了处理,获得最大的联通区域。在C++中,这个实现对应下面的语句:
getAllOb(map1_test, 66, 66, mapFindRouteAStat, obstaclesCoords);
其中map1_test是我预存的地图数据,是1 * 40000的数组,相当于把200 * 200的地图数据展平了,数据中只包含0,1。0表示可以通过,1表示为障碍。mapFindRouteAStat是处理后的1*40000的地图,和map1_test的区别就是不可到达的空地也被视为了障碍。
为了方便使用二维索引,把这个数据转化为了二维数组:
// mapFindRouteAStat转化为二维地图数组int index111 = 0;for (int i = 0; i < SIZE_MAP; ++i) {for (int j = 0; j < SIZE_MAP; ++j) {Map1_2D_Bit[j][i] = mapFindRouteAStat[index111];Map1_2D_Char[j][i] = mapFindRouteAStat[index111];index111++;}}
下面的索引计算相当于对地图障碍位置预先存入数组了,之后直接调用就行,方便加速计算:
// 得到地图所有障碍的索引find_nonzero_indices(mapFindRouteAStat, map_Ind1, map_Ind2);
2.3、有限时间的寻路计算
在寻路时需要考虑到实时性的要求,寻路的函数被封装为了,其中前两个参数为起点和终点,最后一个参数表示是为第几个机器人寻路的,寻路完成后路径会直接加到目标机器人要走的路径上去:
getRoutePath(start_xy_int, end_xy_int,0);
getRoutePath函数并非直接调用了双向Astar寻路算法。函数中,对于较短的路径,一次性使用双向Astar得到路径:
//距离短直接进行运算得到结果// OutputData(LOG_PATH,0,"Direct Found Begin %f %f %f %f\n",start_xy_float[0],start_xy_float[1],end_xy_float[0],end_xy_float[1]);std::vector<std::array<float, 2>>pointstovisit_tmp;findroutevalid=findroute_Direct(start_xy_float,end_xy_float, FIND_ROUTE_AREA_SHIFT, SIZE_MAP, SIZE_MAP, mapFindRouteAStat, map_Ind1,map_Ind2, route_debug, &dis,pointstovisit_tmp,robot_id);if(!findroutevalid){//没有找到路径OutputData(LOG_PATH,0,"ID:%d Direct Found error\n"); }else{pointsToVisit[robot_id].insert(pointsToVisit[robot_id].end(), pointstovisit_tmp.begin(), pointstovisit_tmp.end());OutputData(LOG_PATH,0,"ID:%d %f %f %f %f\n",frame_ID,pointsToVisit[robot_id][0][0],pointsToVisit[robot_id][0][1],pointsToVisit[robot_id][1][0],pointsToVisit[robot_id][1][1]); }
对于较长的路径,如果要进行寻路,则会将创建一个任务列队,每次只运算有限的时间,这主要是考虑实时控制的要求:
myFindRouteTask.push_back({start_xy_float[0],start_xy_float[1],end_xy_float[0],end_xy_float[1],float(robot_id)});
模拟处理寻路任务时,其中while(findRouteOKFlag==FLAG_RUNNING)是模拟每帧不断处理的情况,事实上,每帧运行一次findroute_limit函数即可,因为函数中使用了std::chrono来限制每次运算的时间:
if(!myFindRouteTask.empty()){float start_xy[2]={myFindRouteTask[0][0],myFindRouteTask[0][1]};float end_xy[2]={myFindRouteTask[0][2],myFindRouteTask[0][3]};//初始化任务findroute_limit_Init(start_xy,end_xy, 20, SIZE_MAP, SIZE_MAP,myFindRouteTask[0][4]);myFindRouteTask.erase(myFindRouteTask.begin());}while(findRouteOKFlag==FLAG_RUNNING){findroute_limit(mapFindRouteAStat, map_Ind1,map_Ind2, route_debug, &dis);}
实际运行处理时的函数是这样的:
void findLongRouteTask(void)
{//如果正在计算if(findRouteOKFlag==FLAG_RUNNING){findroute_limit(mapFindRouteAStat, map_Ind1,map_Ind2, route_debug, &dis);findLongRouteTask_Time++;//计算超时,不再计算了to do导出计算超时的点路径,超时导致不会再计算?if(findLongRouteTask_Time>500){findRouteOKFlag=FLAG_END;findLongRouteTask_Time=0;//一定删除目标点!!!!!!!!!!!!!!!!!!!!!!其实就是最后一个OutputData(LOG_LONG_PATH,0,"ID:%d robotID:%d findLongRouteTask END OVERTIME\n",frame_ID,robotFindRouteID);robotDestinations[robotFindRouteID].erase(robotDestinations[robotFindRouteID].end());}if(frame_ID%100==0){// OutputData(LOG_PATH,0,"ID:%d findLongRouteTask ing\n",frame_ID);}}else{// OutputData(LOG_PATH,0,"ID:%d findLongRouteTask FREE\n",frame_ID);//空闲则判断是否有任务没有完成//有任务没有执行完成if(!myFindRouteTask.empty()){findLongRouteTask_Time=0;float start_xy[2]={myFindRouteTask[0][0],myFindRouteTask[0][1]};float end_xy[2]={myFindRouteTask[0][2],myFindRouteTask[0][3]};//初始化任务findroute_limit_Init(start_xy,end_xy, 20, SIZE_MAP, SIZE_MAP,myFindRouteTask[0][4]);myFindRouteTask.erase(myFindRouteTask.begin());OutputData(LOG_LONG_PATH,0,"ID:%d robotID:%d findLongRouteTask Begin sx%f sy%f ex%f ey%f\n",frame_ID,robotFindRouteID,start_xy[0],start_xy[1],end_xy[0],end_xy[1]);}}
}2.4、使用历史路网结构
loadRouteMemory();函数会加载历史走过的路径数据,因此曾经走过的路径不再需要寻路了。getRoutePath(start_xy_int, end_xy_int,0);函数会判断这条寻路能否使用历史的路网数据。
主要加载的数据有这三个,在main.h中设置导出路径,会把历史的寻路数据直接导出来txt,加到Cpp文件就行了,非常方便:

简单介绍这三个的含义,routeMemoryBufTmp是路径数据,所有路径数据都存在这里面。
routeMemoryLengthBufTmp是每条路径的长度,知道了了长度就能把routeMemoryBufTmp的全部路径的数据进行恢复了。
unReachablePointTmp是寻路失败的目标点,如果这些点产生了货物,那么就会忽略这些货物。
float routeMemoryBufTmp[]={};
std::vector<int> routeMemoryLengthBufTmp={};
std::vector<int> unReachablePointTmp={};
加载的代码如下:
unsigned int index_tmp=0;
//赋值给要走的路径
for(int j=0;j<routeMemoryLengthBufTmp.size();j++)
{for(int i=0;i<routeMemoryLengthBufTmp[j];i++){routeMemoryBuf[j].push_back({routeMemoryBufTmp[0+2*index_tmp], routeMemoryBufTmp[1+2*index_tmp]});//涂黑路径边沿,方便进行路径重新调用setBitsAroundPosition(routeMemoryIndex[routeMemoryBufSize], routeMemoryBuf[routeMemoryBufSize][i][0], routeMemoryBuf[routeMemoryBufSize][i][1], ROUTE_MEMORYBUF_DIFFUSION);index_tmp++;}routeMemoryBufSize=routeMemoryBufSize+1;
}
for(int j=0;j<unReachablePointTmp.size();j=j+2)
{deletedTargets.push_back({unReachablePointTmp[j],unReachablePointTmp[j+1]});
}
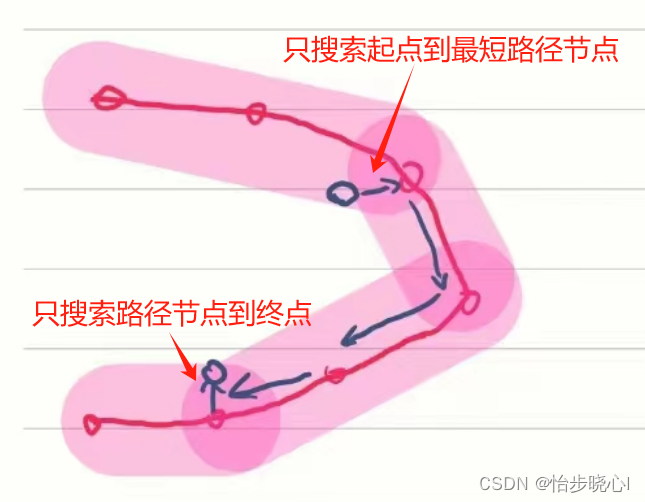
我设置最多可以存储20000条历史路网数据,路网数据的索引使用了一点小技巧来加速。对于每个搜索得到的路网数据,我都创建了一个200x200的bit数组routeMemoryIndex,将路径节点和节点周围N格的数据都设置为1,其余为0。这样我得到一个寻路任务时,我只需要判断起点和终点在这个200x200的bit数组中的位置是否为1,就能判断能否使用这条路径了。
//先判断能否使用现有的路网结构
for(int i=0;i<routeMemoryBufSize;++i)
{if(routeMemoryIndex[i][start_xy[0]][start_xy[1]]==1&&routeMemoryIndex[i][end_xy[0]][end_xy[1]]==1){routememoryindex_tmp=i;//找到了现有路网,跳出For循环break;}
}例如,红色为历史的路网数据。粉红色为将路径节点和节点周围N格的数据都设置为1的示意,在进行搜索时,如果起点和终点都位于一条路径的粉红色区域内,则判断为能使用这条历史路径,如蓝色圆圈所示的起点和终点。这样就会搜索起点到最短路径节点的距离,和终点到最短节点的距离,其余使用路网数据,由此可以省下许多时间。
2.5、中转站机制
奇奇怪怪的点无法搜索得出路径,那么我就设置了一个中转站机制,就是起点和终点位于给定区域的话,就先走到中转站,在前往目标点。但是这种方法逻辑复杂,唉,全书败笔,如果起点和终点分别位于station_area1、station_area2,那么就先前往中转区域station_area:
TransferStation station;station.station_area1.clear();station.station_area2.clear();station.area1 = {{0, 0}, {100, 100}}; station.area2 = {{0, 100}, {100, 200}};station.station_area1.push_back({{32, 94}, {35, 96}});station.station_area1.push_back({{64, 93}, {66, 95}});station.station_area1.push_back({{80, 92}, {82, 95}});station.station_area2.push_back({{32, 105}, {35, 107}});station.station_area2.push_back({{64, 105}, {66, 107}});station.station_area2.push_back({{80, 105}, {82, 107}});map1TransferStation.push_back(station);
使用getRoutePathByTransfer(start_xy_int, end_xy_int,0);在寻路时调用中转站,实际上是对getRoutePath的二次封装。
2.6、一坨稀烂的机器人防碰撞
我用双向Astar得到关键节点,机器人前往节点的具体行动使用Astar算法(因为这段非常好寻路的,距离很短且没有障碍),行动时将其他机器人当作障碍来避障,效果很差,主要是狭窄通道有问题,多个机器人堵起来也有问题。
寻路没问题,就是要撞起来!!!
2.7、提前规划路径
会提前为机器人规划路径加入缓存,比如说我正在去拿货物,会提前规划从货物到码头的路径节点等等。
2.8、运行前修改main.h的日志导出路径,不然报错
3、双向A*寻路算法的python实现
参考:https://blog.csdn.net/m0_56662453/article/details/126426863
大佬现成的代码,学习的。双向Astar相比Astar节省了50%的时间。
相关文章:
机器人寻路算法双向A*(Bidirectional A*)算法的实现C++、Python、Matlab语言
机器人寻路算法双向A*(Bidirectional A*)算法的实现C、Python、Matlab语言 最近好久没更新,在搞华为的软件挑战赛(软挑),好卷只能说。去年还能混进32强,今年就比较迷糊了,这东西对我…...

智慧公厕产品的特点、应用场景
随着城市化进程的加速和智能科技的不断发展,智慧公厕作为城市管理的重要组成部分,逐渐成为了现代城市的一道靓丽风景线。它的特点和应用场景备受人们关注和喜爱。 智慧公厕的特点有哪些呢?首先,它智能化的设备和感应技术为其特点…...
)
vue 插槽(二)
渲染作用域 插槽内容可以访问到父组件的数据作用域,因为插槽内容本身是在父组件模板中定义的。举例来说: <span>{{ message }}</span> <FancyButton>{{ message }}</FancyButton> 这里的两个 {{ message }} 插值表达式渲染…...
【Java】MyBatis快速入门及详解
文章目录 1. MyBatis概述2. MyBatis快速入门2.1 创建项目2.2 添加依赖2.3 数据准备2.4 编写代码2.4.1 编写核心配置文件2.4.2 编写SQL映射文件2.4.3 编写Java代码 3. Mapper代理开发4. MyBatis核心配置文件5. 案例练习5.1 数据准备5.2 查询数据5.2.1 查询所有数据5.2.2 查询单条…...
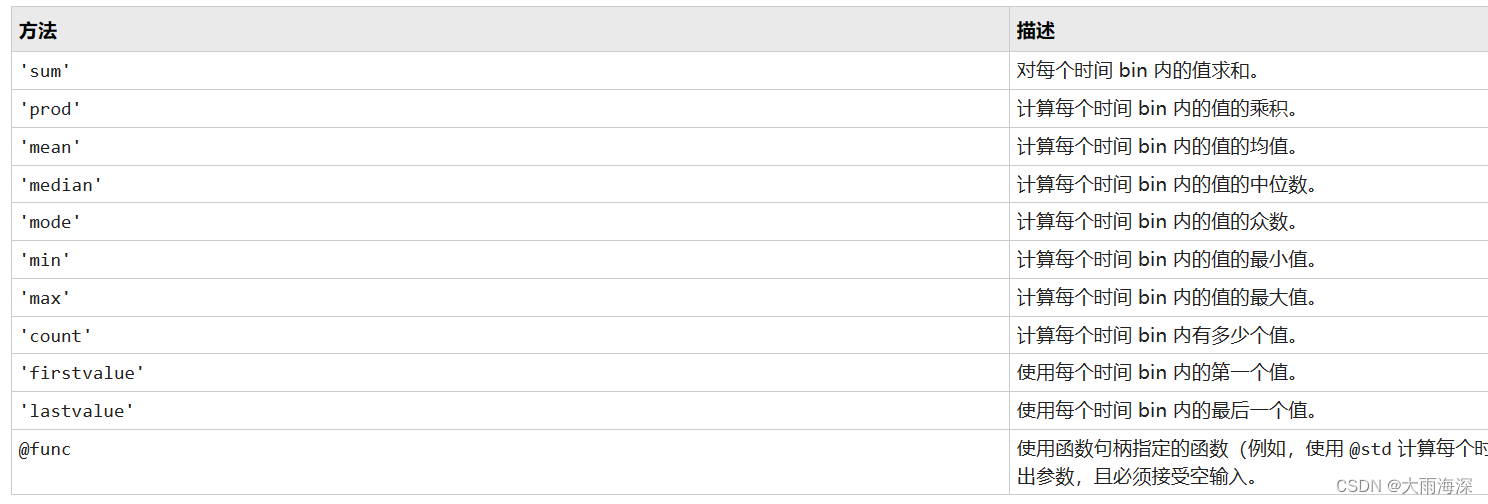
Matlab将日尺度数据转化为月尺度数据
日尺度转化为月尺度 clcclear all% load datadata xlread(data.xlsx) % 例如该数据为1961-01-01至2022-12-31,共计22645天data data(:,1:3) % 该数据有22645行,数据分别为降水,气温,湿度等三列dt datetime(1961-01-01):datatim…...
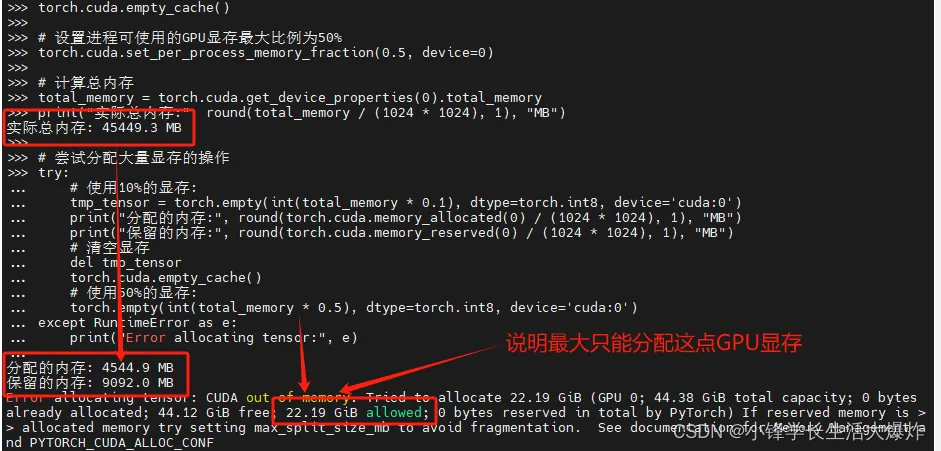
【技巧】PyTorch限制GPU显存的可使用上限
转载请注明出处:小锋学长生活大爆炸[xfxuezhang.cn] 从 PyTorch 1.4 版本开始,引入了一个新的功能 torch.cuda.set_per_process_memory_fraction(fraction, device),这个功能允许用户为特定的 GPU 设备设置进程可使用的显存上限比例。 测试代…...
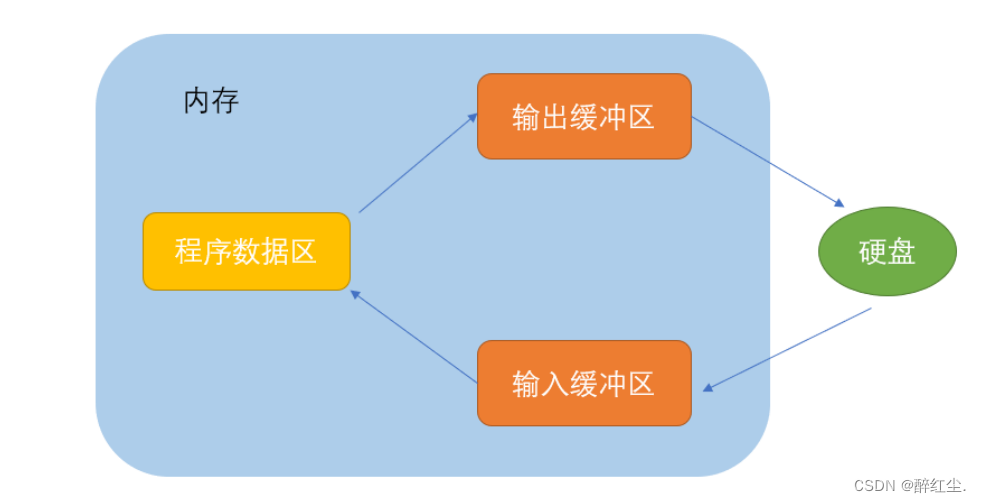
深度理解文件操作
目录 文件 文件名: 标准流 文件指针 文件的打开和关闭 文件的顺序读写: 使用部分 文件的打开和关闭 文件 文件分两种,第一种是程序文件,后一种是数据文件。 程序文件:包括源程序文件(后缀为.c&…...
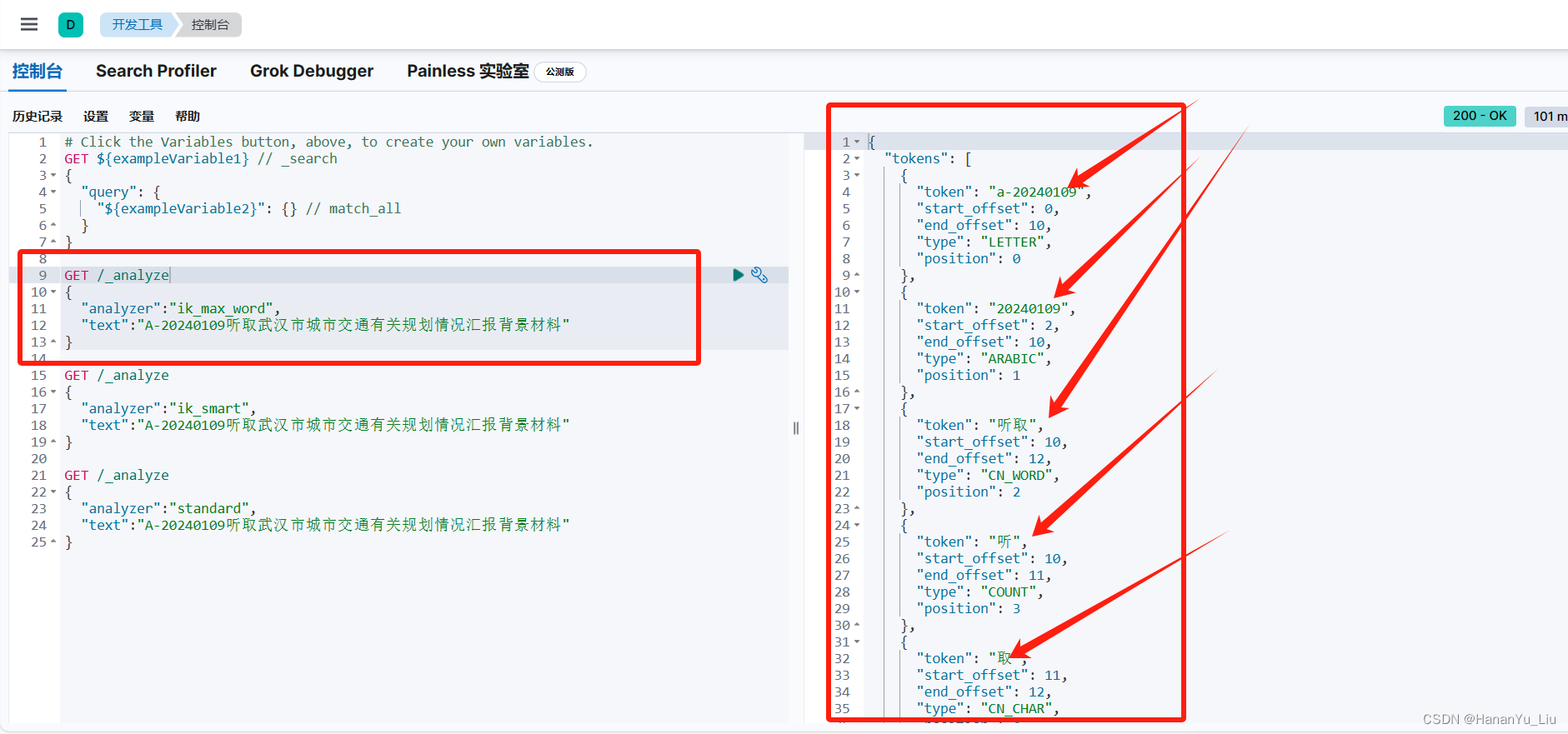
【搜索引擎2】实现API方式调用ElasticSearch8接口
1、理解ElasticSearch各名词含义 ElasticSearch对比Mysql Mysql数据库Elastic SearchDatabase7.X版本前有Type,对比数据库中的表,新版取消了TableIndexRowDocumentColumnmapping Elasticsearch是使用Java开发的,8.1版本的ES需要JDK17及以上…...

配置小程序的服务器域名
准备工作 拥有一个已注册的域名:确保您已经注册了一个符合国家和地区相关法律法规要求的域名。 完成域名备案(如有必要):根据国家和地区的法律法规,某些情况下可能需要对域名进行备案才能用于互联网服务。 配置 DNS&…...
政安晨:【深度学习神经网络基础】(一)—— 逐本溯源
政安晨的个人主页:政安晨 欢迎 👍点赞✍评论⭐收藏 收录专栏: 政安晨的机器学习笔记 希望政安晨的博客能够对您有所裨益,如有不足之处,欢迎在评论区提出指正! 与计算机一样的古老历史 神经网络的出现可追溯到20世纪40年…...

技巧 Win10电脑打开SMB协议共享文件,手机端查看
一. 打开 SMB1.0/CIFS文件共享支持 ⏹如下图所示,打开SMB1.0/CIFS文件共享支持 二. 开启网络发现 ⏹开启网络发现,确保共享的文件能在局域网内被发现 三. 共享文件夹到局域网 ⏹根据需要勾选需要共享的文件夹,共享到局域网 四. 共享文件查…...

java实现MP4视频压缩
要在Java中实现MP4视频压缩,您可以使用一些第三方库,比如ffmpeg或Xuggler等。下面是使用ffmpeg库进行MP4视频压缩的示例代码: java import java.io.BufferedReader; import java.io.InputStreamReader; public class MP4Compressor { public static void main(String[] args)…...

云电脑安全性怎么样?企业如何选择安全的云电脑
云电脑在保障企业数字资产安全方面,采取了一系列严谨而全面的措施。随着企业对于数字化转型的深入推进,数字资产的安全问题日益凸显,而云电脑作为一种新兴的办公模式,正是为解决这一问题而生。云电脑安全吗?可以放心使…...

【python】pygame游戏框架
文章目录 pygame常用模块pygame:主模块,包含初始化、退出、时间、事件等函数。pygame.cdrom 访问光驱pygame.cursors 加载光驱pygame.joystick 操作游戏手柄或者类似的东西pygame.mouse:鼠标模块,包含获取、设置、控制等函数。pygame.key 键盘模块pygame.display:显示模块…...

计算机OSI7层协议模型
OSI模型是由国际标准化组织(ISO)制定的一种网络通信的标准体系,旨在确保不同厂商的网络设备能够互联互通。该模型将网络通信划分为七个独立的层次,每一层负责特定的功能。这种分层设计使得网络协议的开发、维护和升级更加容易。 …...
书生·浦语大模型实战营之全链路开源体系
书生浦语大模型实战营之全链路开源体系 为了推动大模型在更多行业落地开花,让开发者们更高效的学习大模型的开发与应用,上海人工智能实验室重磅推出书生浦语大模型实战营,为广大开发者搭建大模型学习和实践开发的平台,两周时间带…...

/.git/config文件目录
git config可以看做是一个配置工具,它允许用户获得和设置与git相关的配置选项,是我们灵活使用git软件的第一步...

MySQL 8.0 新特性之不可见主键
数据库设计通常需要满足一定的范式要求,其中主键更是最基本的要求。不过,数据库管理系统却允许我们创建没有主键的表。这样的表在 MySQL 中会带来查询性能低下、复制延迟甚至无法实现高可用配置等问题。 为此,MySQL 8.0.30 版本引入了一个新…...

kubernetes-networkpolicies网络策略问题
kubernetes-networkpolicies网络策略问题 问题描述 重点重点重点,查看我的博客CKA考题,里面能找到解决方法 1.部署prometheus监控的时候,都部署成功,但是web访问503-504超时 2.添加ingress的时候也是访问不到,其他命…...
wps没保存关闭了恢复数据教程
有时候我们因为电脑问题会忘记保存就关闭wps导致数据丢失,不知道wps没保存关闭了怎么恢复数据,其实数据是无法恢复的。 wps没保存关闭了怎么恢复数据 1、wps没有数据恢复功能,不过可以开启自动备份。 2、我们可以先点击wps左上角的“文件”…...

UE5 学习系列(二)用户操作界面及介绍
这篇博客是 UE5 学习系列博客的第二篇,在第一篇的基础上展开这篇内容。博客参考的 B 站视频资料和第一篇的链接如下: 【Note】:如果你已经完成安装等操作,可以只执行第一篇博客中 2. 新建一个空白游戏项目 章节操作,重…...

DockerHub与私有镜像仓库在容器化中的应用与管理
哈喽,大家好,我是左手python! Docker Hub的应用与管理 Docker Hub的基本概念与使用方法 Docker Hub是Docker官方提供的一个公共镜像仓库,用户可以在其中找到各种操作系统、软件和应用的镜像。开发者可以通过Docker Hub轻松获取所…...

Cesium1.95中高性能加载1500个点
一、基本方式: 图标使用.png比.svg性能要好 <template><div id"cesiumContainer"></div><div class"toolbar"><button id"resetButton">重新生成点</button><span id"countDisplay&qu…...
【网络安全产品大调研系列】2. 体验漏洞扫描
前言 2023 年漏洞扫描服务市场规模预计为 3.06(十亿美元)。漏洞扫描服务市场行业预计将从 2024 年的 3.48(十亿美元)增长到 2032 年的 9.54(十亿美元)。预测期内漏洞扫描服务市场 CAGR(增长率&…...
STM32标准库-DMA直接存储器存取
文章目录 一、DMA1.1简介1.2存储器映像1.3DMA框图1.4DMA基本结构1.5DMA请求1.6数据宽度与对齐1.7数据转运DMA1.8ADC扫描模式DMA 二、数据转运DMA2.1接线图2.2代码2.3相关API 一、DMA 1.1简介 DMA(Direct Memory Access)直接存储器存取 DMA可以提供外设…...
【开发技术】.Net使用FFmpeg视频特定帧上绘制内容
目录 一、目的 二、解决方案 2.1 什么是FFmpeg 2.2 FFmpeg主要功能 2.3 使用Xabe.FFmpeg调用FFmpeg功能 2.4 使用 FFmpeg 的 drawbox 滤镜来绘制 ROI 三、总结 一、目的 当前市场上有很多目标检测智能识别的相关算法,当前调用一个医疗行业的AI识别算法后返回…...
Yolov8 目标检测蒸馏学习记录
yolov8系列模型蒸馏基本流程,代码下载:这里本人提交了一个demo:djdll/Yolov8_Distillation: Yolov8轻量化_蒸馏代码实现 在轻量化模型设计中,**知识蒸馏(Knowledge Distillation)**被广泛应用,作为提升模型…...
Docker 本地安装 mysql 数据库
Docker: Accelerated Container Application Development 下载对应操作系统版本的 docker ;并安装。 基础操作不再赘述。 打开 macOS 终端,开始 docker 安装mysql之旅 第一步 docker search mysql 》〉docker search mysql NAME DE…...

GruntJS-前端自动化任务运行器从入门到实战
Grunt 完全指南:从入门到实战 一、Grunt 是什么? Grunt是一个基于 Node.js 的前端自动化任务运行器,主要用于自动化执行项目开发中重复性高的任务,例如文件压缩、代码编译、语法检查、单元测试、文件合并等。通过配置简洁的任务…...

Spring Boot + MyBatis 集成支付宝支付流程
Spring Boot MyBatis 集成支付宝支付流程 核心流程 商户系统生成订单调用支付宝创建预支付订单用户跳转支付宝完成支付支付宝异步通知支付结果商户处理支付结果更新订单状态支付宝同步跳转回商户页面 代码实现示例(电脑网站支付) 1. 添加依赖 <!…...