【3D目标检测】Det3d—SE-SSD模型训练(前篇):KITTI数据集训练
SE-SSD模型训练
- 1 基于Det3d搭建SE-SSD环境
- 2 自定义数据准备
- 2.1 自定义数据集标注
- 2.2 训练数据生成
- 2.3 数据集分割
- 3 训练KITTI数据集
- 3.1 数据准备
- 3.2 配置修改
- 3.3 模型训练
1 基于Det3d搭建SE-SSD环境
Det3D环境搭建参考:【3D目标检测】环境搭建(OpenPCDet、MMdetection3d、Det3d)
SE-SSD源码链接:https://github.com/Vegeta2020/SE-SSD
首先激活Det3d环境(上述链接已经搭建好的环境):
conda activate det3d
新建
3_det3d_projects文件夹(自定义名称),用于储存基于Det3D架构的模型源码项目,将SE-SSD源码存储在里面
目录结构如下:
SE-SSD环境部署指令
cd ~/3_det3d_projects
git clone https://github.com/Vegeta2020/SE-SSD.git
cd ./SE-SSD/det3d/core/iou3d
python setup.py install
cd ./SE-SSD
pip install ipykernel nbconvert numba==0.48 -i https://pypi.tuna.tsinghua.edu.cn/simple
python setup.py build developgit clone https://github.com/jackd/ifp-sample.git
pip install -e ifp-sample
成功安装如下:

以下未说明均在SE-SSD目录下
2 自定义数据准备
2.1 自定义数据集标注
参考链接:【3D目标检测】OpenPCDet自定义数据集训练
2.2 训练数据生成
官方参考链接:https://github.com/V2AI/Det3D/blob/master/GETTING_STARTED.md
数据组织结果如下:
# For KITTI Dataset
└── SE-SSD/data/kitti├── training <-- 7481 train data├── image_2 <-- for visualization├── calib├── label_2├── velodyne└── velodyne_reduced <-- empty directory└── testing <-- 7580 test data├── image_2 <-- for visualization├── calib├── velodyne└── velodyne_reduced <-- empty directory
# KITTI
python tools/create_data.py kitti_data_prep --root_path=KITTI_DATASET_ROOT
2.3 数据集分割
"""
2024.03.21
author:alian
数据预处理操作
1.数据集分割
"""
import os
import random
import shutil
import numpy as npdef get_train_val_txt_kitti_det3d(src_path):"""3D算法库:Det3D数据格式:KITTI# For KITTI Dataset└── KITTI_DATASET_ROOT├── training <-- 7481 train data| ├── image_2 <-- for visualization| ├── calib| ├── label_2| ├── velodyne| └── velodyne_reduced <-- empty directory└── testing <-- 7580 test data├── image_2 <-- for visualization├── calib├── velodyne└── velodyne_reduced <-- empty directorysrc_path: KITTI_DATASET_ROOT kitti文件夹"""# 1.自动生成数据集划分文件夹ImageSetsset_path = "%s/ImageSets/"%src_pathif os.path.exists(set_path): # 如果文件存在shutil.rmtree(set_path) # 清空原始数据os.makedirs(set_path) # 重新创建else:os.makedirs(set_path) # 自动新建文件夹# 2.训练样本分割 生成train.txt val.txt trainval.txttrain_list = os.listdir(os.path.join(src_path,'training','velodyne'))random.shuffle(train_list) # 打乱顺序,随机采样# 设置训练和验证的比例train_p = 0.8# 开始写入分割文件f_train = open(os.path.join(set_path, "train.txt"), 'w')f_val = open(os.path.join(set_path, "val.txt"), 'w')f_trainval = open(os.path.join(set_path, "trainval.txt"), 'w')for i,src in enumerate(train_list):if i<int(len(train_list)*train_p): # 训练集的数量f_train.write(src[:-4] + '\n')f_trainval.write(src[:-4] + '\n')else:f_val.write(src[:-4] + '\n')f_trainval.write(src[:-4] + '\n')# 3.测试样本分割 生成test.txttest_list = os.listdir(os.path.join(src_path,'testing','velodyne'))f_test = open(os.path.join(set_path, "test.txt"), 'w')for i,src in enumerate(test_list):f_test.write(src[:-4] + '\n')if __name__=='__main__':"""src_path: 数据目录"""src_path = '/media/ll/L/llr/a2023_my_3d/Det3D/data/custom'get_train_val_txt_kitti_det3d(src_path)
输入:数据集路径
输出:在输入的数据集路径下生成
└── ImageSets├── train.txt├── val.txt├── test.txt└── trainval.txt
3 训练KITTI数据集
先训练公开数据集,验证代码可行性
3.1 数据准备
tools/creat_data.py
import copy
from pathlib import Path
import pickleimport firefrom det3d.datasets.kitti import kitti_common as kitti_ds
from det3d.datasets.utils.create_gt_database import create_groundtruth_database
from det3d.torchie import Configdef kitti_data_prep(root_path):kitti_ds.create_kitti_info_file(root_path)kitti_ds.create_reduced_point_cloud(root_path)create_groundtruth_database("KITTI", root_path, Path(root_path) / "kitti_infos_train.pkl")if __name__ == "__main__":# 数据集目录kitti_data_prep("/media/ll/L/llr/a2023_my_3d/3_det3d_projects/SE-SSD/data/kitti")
运行指令
Python tools/creat_data.py
其中kitti_infos_train.pkl的数据信息如下:
储存了所有数据的信息(以文件为单位)

包括:图像、点云、标定、标签信息
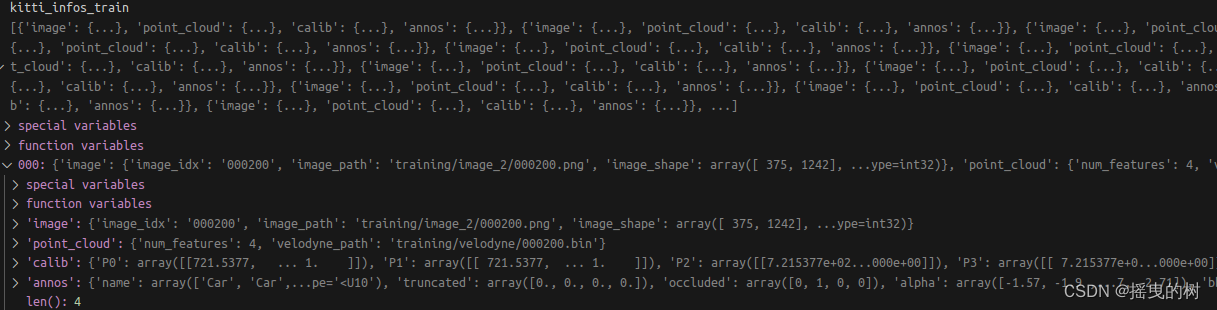
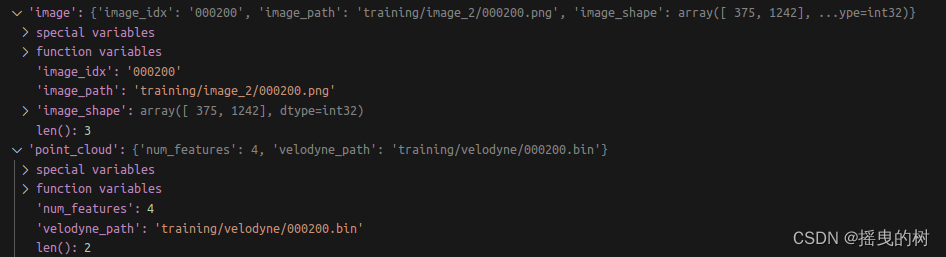
其中图像和点云信息如下:
其中标签信息如下:
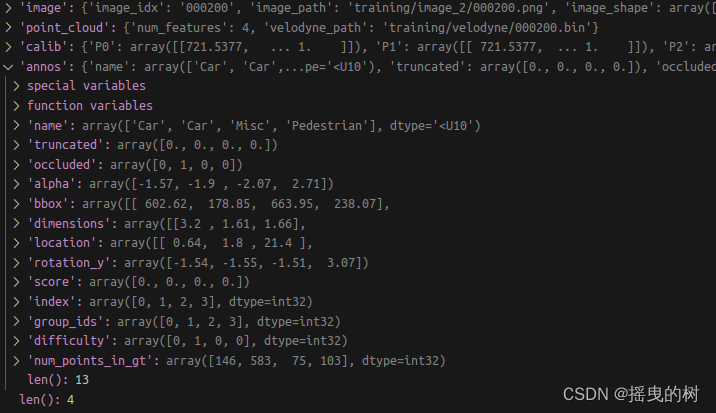
标注信息解析:
第1列(字符串):代表物体类别(type)
总共有9类,分别是:Car、Van、Truck、Pedestrian、Person_sitting、Cyclist、Tram、Misc、DontCare。
其中DontCare标签表示该区域没有被标注,比如由于目标物体距离激光雷达太远。为了防止在评估过程中(主要是计算precision),将本来是目标物体但是因为某些原因而没有标注的区域统计为假阳性(false positives),评估脚本会自动忽略DontCare区域的预测结果。第2列(浮点数):代表物体是否被截断(truncated)
数值在0(非截断)到1(截断)之间浮动,数字表示指离开图像边界对象的程度。第3列(整数):代表物体是否被遮挡(occluded)
整数0、1、2、3分别表示被遮挡的程度。第4列(弧度数):物体的观察角度(alpha)
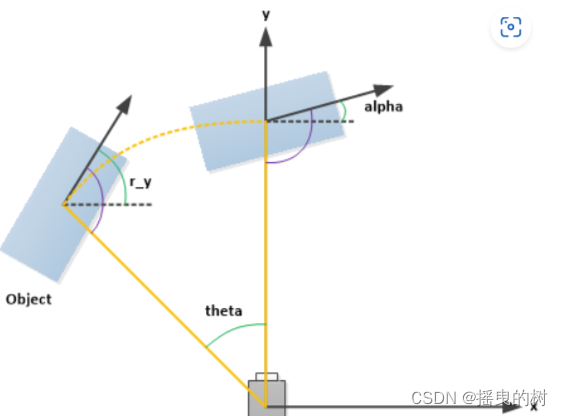
取值范围为:-pi ~ pi(单位:rad),它表示在相机坐标系下,以相机原点为中心,相机原点到物体中心的连线为半径,将物体绕相机y轴旋转至相机z轴,此时物体方向与相机x轴的夹角(如下图所示,y轴垂直与屏幕)第5~8列(浮点数):物体的2D边界框大小(bbox)
四个数分别是xmin、ymin、xmax、ymax(单位:pixel),表示2维边界框的左上角和右下角的坐标。第9~11列(浮点数):3D物体的尺寸(dimensions)
分别是高、宽、长(单位:米)第12-14列(浮点数):3D物体的位置(location)
分别是x、y、z(单位:米),特别注意的是,这里的xyz是在相机坐标系下3D物体的中心点位置。第15列(弧度数):3D物体的空间方向(rotation_y)
取值范围为:-pi ~pi(单位:rad),它表示,在照相机坐标系下,物体的全局方向角(物体前进方向与相机坐标系x轴的夹角),如下图所示。第16列(浮点数):检测的置信度(score)
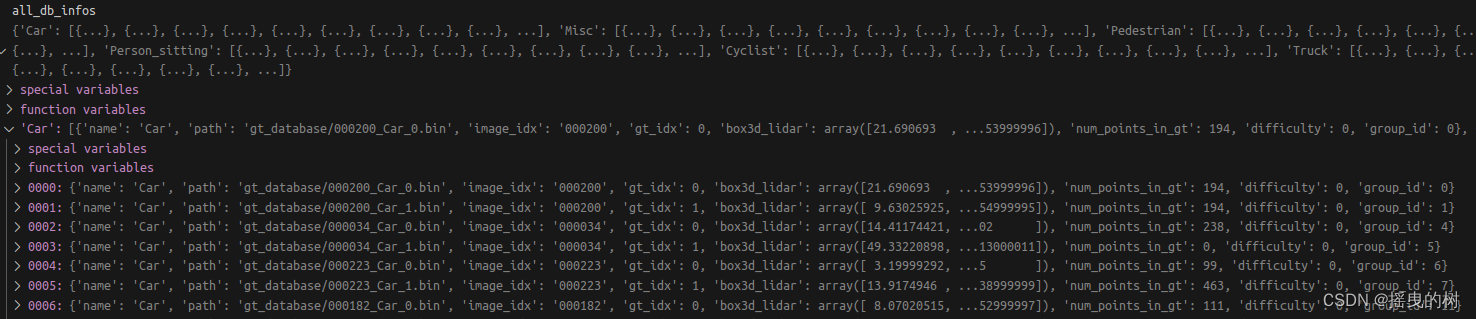
其中dbinfos_train.pkl的数据信息如下:
根据类别来划分样本实例

重要说明:
当准备数据集时,./Det3d/det3d
当训练模型时,./Det3d/0det3d
原因解释:
数据准备时,使用Det3d的det3d
模型训练时则用回SE-SSD的det3d
└── 3_det3d_projects├── SE-SSD├── det3d└── ......└── ......
└── Det3D├── 0det3d(数据集准备好后,改变名字,否则后续使用SE-SSD会找不到自己的det3d)└── ......
3.2 配置修改
修改examples/second/configs/config.py配置
主要修改三个部分
- 数据集目录
- 权重保存目录
- 预训练权重目录
import itertools
import logging
from pathlib import Pathfrom det3d.builder import build_box_coder
from det3d.utils.config_tool import get_downsample_factor
import glob# norm_cfg = dict(type='SyncBN', eps=1e-3, momentum=0.01)
norm_cfg = Nonetasks = [dict(num_class=1, class_names=["Car"],),]class_names = list(itertools.chain(*[t["class_names"] for t in tasks]))# training and testing settings
box_coder = dict(type="ground_box3d_coder", n_dim=7, linear_dim=False, encode_angle_vector=False,)# exp_sesssd_release_v0_0: based on v1_0, remove sada
# exp_sesssd_release_v1_0: default settings of sesssd# torch.set_printoptions(precision=4, sci_mode=False)
my_paras = dict(batch_size=4,data_mode="train", # "train" or "trainval": the set to train the model;enable_ssl=True, # Ensure "False" in CIA-SSD trainingeval_training_set=False, # True: eval on "data_mode" set; False: eval on validation set.[Ensure "False" in training; Switch in Testing]# unusedenable_difficulty_level=False,remove_difficulty_points=False, # act with neccessary condition: enable_difficulty_level=True.gt_random_drop=-1,data_aug_random_drop=-1,far_points_first=False,data_aug_with_context=-1, # enlarged size for w and l in data aug.gt_aug_with_context=-1,gt_aug_similar_type=False,min_points_in_gt=-1,loss_iou=None,
)# model settings
model = dict(type="VoxelNet",pretrained=None,reader=dict(type="VoxelFeatureExtractorV3", num_input_features=4, norm_cfg=norm_cfg,),backbone=dict(type="SpMiddleFHD", num_input_features=4, ds_factor=8, norm_cfg=norm_cfg,),neck=dict(type="SSFA",layer_nums=[5,],ds_layer_strides=[1,],ds_num_filters=[128,],us_layer_strides=[1,],us_num_filters=[128,],num_input_features=128,norm_cfg=norm_cfg,logger=logging.getLogger("RPN"),),bbox_head=dict(type="MultiGroupHead",mode="3d",in_channels=sum([128,]),norm_cfg=norm_cfg,tasks=tasks,weights=[1,],box_coder=build_box_coder(box_coder),encode_background_as_zeros=True,loss_norm=dict(type="NormByNumPositives", pos_cls_weight=1.0, neg_cls_weight=1.0,),loss_cls=dict(type="SigmoidFocalLoss", alpha=0.25, gamma=2.0, loss_weight=1.0,),use_sigmoid_score=True,loss_bbox=dict(type="WeightedSmoothL1Loss", sigma=3.0, code_weights=[1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0], codewise=True, loss_weight=2.0, ),encode_rad_error_by_sin=True,loss_aux=dict(type="WeightedSoftmaxClassificationLoss", name="direction_classifier", loss_weight=0.2,),direction_offset=0.0,#loss_iou=my_paras['loss_iou'],),
)target_assigner = dict(type="iou",anchor_generators=[dict(type="anchor_generator_range",sizes=[1.6, 3.9, 1.56], # w, l, hanchor_ranges=[0, -40.0, -1.0, 70.4, 40.0, -1.0],rotations=[0, 1.57],matched_threshold=0.6,unmatched_threshold=0.45,class_name="Car",),],sample_positive_fraction=-1,sample_size=512,region_similarity_calculator=dict(type="nearest_iou_similarity",),pos_area_threshold=-1,tasks=tasks,
)assigner = dict(box_coder=box_coder,target_assigner=target_assigner,out_size_factor=8,debug=False,enable_similar_type=True,
)train_cfg = dict(assigner=assigner)test_cfg = dict(nms=dict(use_rotate_nms=True,use_multi_class_nms=False,nms_pre_max_size=1000,nms_post_max_size=100,nms_iou_threshold=0.01,),score_threshold=0.3,post_center_limit_range=[0, -40.0, -5.0, 70.4, 40.0, 5.0],max_per_img=100,
)# dataset settings----------------------------------------------------------------------------------
data_root_prefix = "/media/ll/L/llr/a2023_my_3d/3_det3d_projects/SE-SSD/data/kitti" # 数据集目录
dataset_type = "KittiDataset"db_sampler = dict(type="GT-AUG",enable=True,db_info_path=glob.glob('%s/dbinfos_train.pkl'%data_root_prefix)[0],sample_groups=[dict(Car=15,),],db_prep_steps=[dict(filter_by_min_num_points=dict(Car=5,)),dict(filter_by_difficulty=[-1],), # todo: need to check carefully],global_random_rotation_range_per_object=[0, 0],rate=1.0,gt_random_drop=my_paras['gt_random_drop'],gt_aug_with_context=my_paras['gt_aug_with_context'],gt_aug_similar_type=my_paras['gt_aug_similar_type'],
)
train_preprocessor = dict(mode="train",shuffle_points=True,gt_loc_noise=[1.0, 1.0, 0.5],gt_rot_noise=[-0.785, 0.785],global_rot_noise=[-0.785, 0.785],global_scale_noise=[0.95, 1.05],global_rot_per_obj_range=[0, 0],global_trans_noise=[0.0, 0.0, 0.0],remove_points_after_sample=True,gt_drop_percentage=0.0,gt_drop_max_keep_points=15,remove_environment=False,remove_unknown_examples=my_paras.get("remove_difficulty_points", False),db_sampler=db_sampler,class_names=class_names, # 'Car'symmetry_intensity=False,enable_similar_type=True,min_points_in_gt=my_paras["min_points_in_gt"],data_aug_with_context=my_paras["data_aug_with_context"],data_aug_random_drop=my_paras["data_aug_random_drop"],
)val_preprocessor = dict(mode="val",shuffle_points=False,remove_environment=False,remove_unknown_examples=False,
)voxel_generator = dict(range=[0, -40.0, -3.0, 70.4, 40.0, 1.0],voxel_size=[0.05, 0.05, 0.1],max_points_in_voxel=5,max_voxel_num=20000,far_points_first=my_paras['far_points_first'],
)train_pipeline = [dict(type="LoadPointCloudFromFile"),dict(type="LoadPointCloudAnnotations", with_bbox=True, enable_difficulty_level=my_paras.get("enable_difficulty_level", False)),dict(type="Preprocess", cfg=train_preprocessor),dict(type="Voxelization", cfg=voxel_generator),dict(type="AssignTarget", cfg=train_cfg["assigner"]),dict(type="Reformat"),# dict(type='PointCloudCollect', keys=['points', 'voxels', 'annotations', 'calib']),
]
test_pipeline = [dict(type="LoadPointCloudFromFile"),dict(type="LoadPointCloudAnnotations", with_bbox=True),dict(type="Preprocess", cfg=val_preprocessor),dict(type="Voxelization", cfg=voxel_generator),dict(type="AssignTarget", cfg=train_cfg["assigner"]),dict(type="Reformat"),
]
training_pipeline = test_pipeline if my_paras['eval_training_set'] else train_pipelinedata_root = data_root_prefix # 数据集目录
train_anno = glob.glob('%s/*_infos_train.pkl'%data_root_prefix)[0]
val_anno = glob.glob('%s/*val.pkl'%data_root_prefix)[0]
test_anno = glob.glob('%s/*test.pkl'%data_root_prefix)[0]
trainval_anno = glob.glob('%s/*trainval.pkl'%data_root_prefix)[0]data = dict(samples_per_gpu=my_paras['batch_size'], # batch_size: 4workers_per_gpu=2, # default: 2train=dict(type=dataset_type,root_path=data_root,info_path=train_anno,class_names=class_names,pipeline=training_pipeline,),val=dict(type=dataset_type,root_path=data_root,info_path=val_anno,class_names=class_names,pipeline=test_pipeline,),test=dict(type=dataset_type,root_path=data_root,info_path=test_anno,class_names=class_names,pipeline=test_pipeline,),trainval=dict(type=dataset_type,root_path=data_root,info_path=trainval_anno,class_names=class_names,pipeline=test_pipeline,),train_unlabel_val=dict(type=dataset_type,root_path=data_root,info_path=val_anno,class_names=class_names,pipeline=train_pipeline,labeled=False,),train_unlabel_test=dict(type=dataset_type,root_path=data_root,info_path=test_anno,class_names=class_names,pipeline=train_pipeline,labeled=False,),
)# for cia optimizer
optimizer = dict(type="adam", amsgrad=0.0, wd=0.01, fixed_wd=True, moving_average=False,)
optimizer_config = dict(grad_clip=dict(max_norm=35, norm_type=2))
lr_config = dict(type="one_cycle", lr_max=0.003, moms=[0.95, 0.85], div_factor=10.0, pct_start=0.4,) # learning policy in training hookscheckpoint_config = dict(interval=1)
log_config = dict(interval=10,hooks=[dict(type="TextLoggerHook"),],) # dict(type='TensorboardLoggerHook')# runtime settings-----------------------------------------------------------------------------------------
TAG = 'exp_se_ssd_v1_1' # 权重文件保存目录
work_dir = "/media/ll/L/llr/a2023_my_3d/3_det3d_projects/SE-SSD/examples/second/" + TAG
total_epochs = 60
device_ids = range(8)
dist_params = dict(backend="nccl", init_method="env://")
log_level = "INFO"
# 预训练权重文件
load_from = "/media/ll/L/llr/a2023_my_3d/3_det3d_projects/SE-SSD/examples/second/pre_trained_model/cia-ssd-model.pth"
resume_from = None
workflow = [("train", 60), ("val", 1)] if my_paras['enable_ssl'] else [("train", 60), ("val", 1)]
save_file = False if TAG == "debug" or TAG == "exp_debug" or Path(work_dir, "Det3D").is_dir() else True
3.3 模型训练
下载预训练权重文件
SE-SSE预训练权重:https://drive.google.com/file/d/1M2nP_bGpOy0Eo90xWFoTIUkjhdw30Pjs/view?usp=sharing
CIA-SSD预训练权重:https://drive.google.com/file/d/1SElYNQCsr4gctqLxmB6Fc4t7Ed8SgBgs/view?usp=sharing
修改tools/train.py配置文件的路径
大概在29行
def parse_args():parser = argparse.ArgumentParser(description="Train a detector")# 修改这里!!!!!parser.add_argument("--config", default='/media/ll/L/llr/a2023_my_3d/3_det3d_projects/SE-SSD/examples/second/configs/config.py', help="train config file path")parser.add_argument("--work_dir", help="the dir to save logs and models")parser.add_argument("--resume_from", help="the checkpoint file to resume from")parser.add_argument("--validate", action="store_true", help="whether to evaluate the checkpoint during training",)parser.add_argument("--gpus", type=int, default=1, help="number of gpus to use " "(only applicable to non-distributed training)",)parser.add_argument("--seed", type=int, default=None, help="random seed")parser.add_argument("--launcher",choices=["none", "pytorch", "slurm", "mpi"],default="none",help="job launcher",)parser.add_argument("--local_rank", type=int, default=0)parser.add_argument("--autoscale-lr",action="store_true",help="automatically scale lr with the number of gpus",)parser.add_argument("--save_file", type=bool, default=True, help="whether save code files as backup", )args = parser.parse_args()if "LOCAL_RANK" not in os.environ:os.environ["LOCAL_RANK"] = str(args.local_rank)return args
训练指令:
python tools/train.py


以上就实现了SE-SSD在KITTI数据上的训练!
相关文章:
【3D目标检测】Det3d—SE-SSD模型训练(前篇):KITTI数据集训练
SE-SSD模型训练 1 基于Det3d搭建SE-SSD环境2 自定义数据准备2.1 自定义数据集标注2.2 训练数据生成2.3 数据集分割 3 训练KITTI数据集3.1 数据准备3.2 配置修改3.3 模型训练 1 基于Det3d搭建SE-SSD环境 Det3D环境搭建参考:【3D目标检测】环境搭建(OpenP…...
k8s1.28.8版本安装prometheus并持久化数据
本文参考 [k8s安装prometheus并持久化数据_/prometheus-config-reloader:-CSDN博客](https://blog.csdn.net/vic_qxz/article/details/119598466)前置要求: 已经部署了NFS或者其他存储的K8s集群. 这里注意networkpolicies网络策略问题,可以后面删除这个策略&#x…...
Mybatis-特殊SQL的执行
1. 模糊查询 在MyBatis中进行模糊查询时,有以下三种常见的实现方式: 1.1. 错误示范 先来个准备操作,并做一个错误示例 根据姓名,模糊查询用户,(x小x) 更新数据表 SQLMapper.java package com.sakurapaid.mybatis3…...
金融衍生品市场
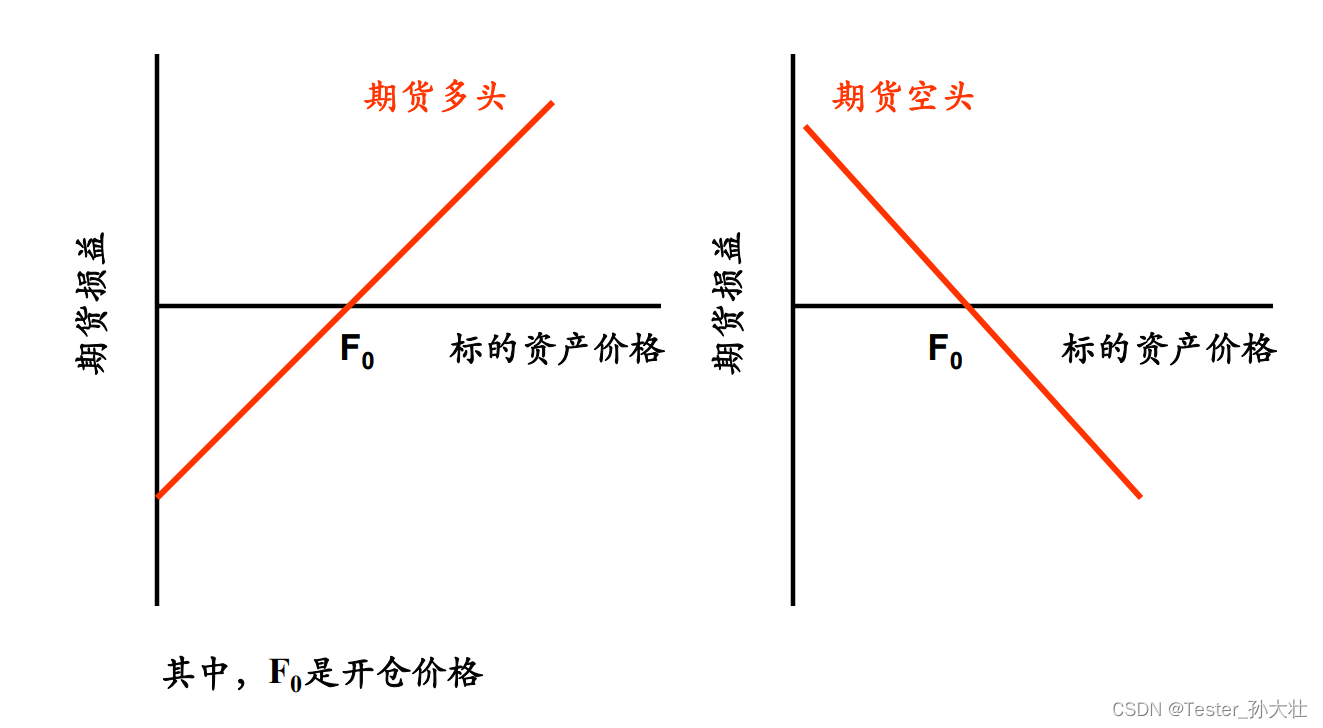
金融衍生品市场 衍生金融品的作用衍生金融工具远期合约期货合约期权 衍生金融品的作用 套期保值(Hedging) 组合多头头寸(long position)与空头头寸(short position)例:股票与股指期货 投机 衍生金融工具 远期合约 定义:在将来…...

2、Cocos Creator 下载安装
Cocos Creator 从 v2.3.2 开始接入了全新的 Dashboard 系统,能够同时对多版本引擎和项目进行统一升级和管理!Cocos Dashboard 将做为 Creator 各引擎统一的下载器和启动入口,方便升级和管理多个版本的 Creator。还集成了统一的项目管理及创建…...

Docker版本:18.06.1安装
1、操作系统:CentOS 7.5以上 2、Docker版本:18.06.1 1、解压 tar -xvf docker-18.06.1-ce.tgz2、将解压出来的docker文件内容移动到 /usr/bin/ 目录下 cp docker/* /usr/bin/3、将docker注册为service vim /etc/systemd/system/docker.service将下列…...

记 SpringBoot 使用@RequestBody 接收不到参数
POST请求,前端传的参数名字跟后端规定的参数一样。但是通过RequestBody注解接收的参数始终为NULL! //实体类中属性没有用驼峰命名 private String SubscribeID; /*** 标题*/ private String Title;解决方案: 1、字段上使用JsonProperty(valu…...

unity 打包安卓错误汇集
Failed to find target with hash string "android-34’ in: D:Pr 他说找不到sdk34level的我用as打开后卸载又重装,最后解决了 我放到Plugins/Android/下面的Java代码没有被编译 这个不知道为什么。我故意把代码写的有问题,会报错那种ÿ…...

C语言-文件操作
🌈很高兴可以来阅读我的博客!🌟我热衷于分享🖊学习经验,🏫多彩生活,精彩足球赛事⚽🔗我的CSDN: Kevin ’ s blog📂专栏收录:C预言 1. 文件的作用 …...

ADB 操作命令详解及用法大全
ADB 简介 ADB,全称 Android Debug Bridge,是 Google 提供的一款用于 Android 平台设备(包括真机和模拟器)调试、交互和管理的命令行工具。通过 ADB,开发者可以在电脑上对连接的 Android 设备执行一系列高级操作&#…...

指针数组。
指针数组 int c[5]{1,2,3,4,5};int *pc;printf("p:%d",p);return 0;输出:p:-756683712 说明p是地址值,*p就是取这个地址上的元素的值。所以printf(“*p:%d”,*p); 打印出来的是 *p:1 *pc,c是c[5]数组的首地址元素。 #include <iostream>…...
GitHub开源项目权限管理-使用账号和个人令牌访问
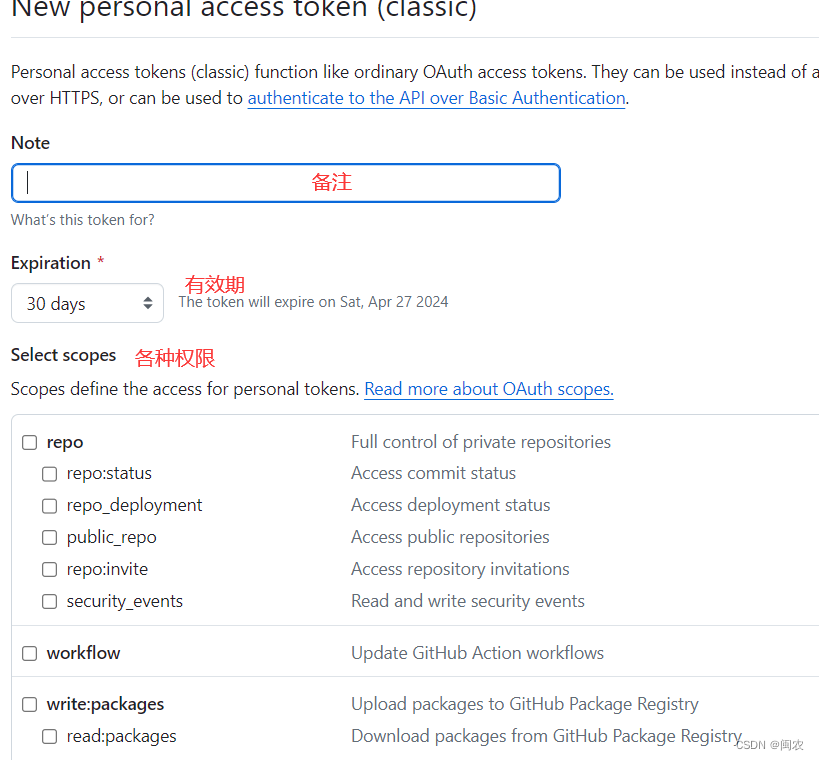
1.打开后台账号设置 2.找到左下角的Developer settings 3.找到Personal access tokens 的 Tokens(classic) 4.选择创建新证书 5.填写证书信息 6.点击生成证书,复制证书并且保存起来(血泪教训,证书只会在创建时显示一次,以后就再也…...
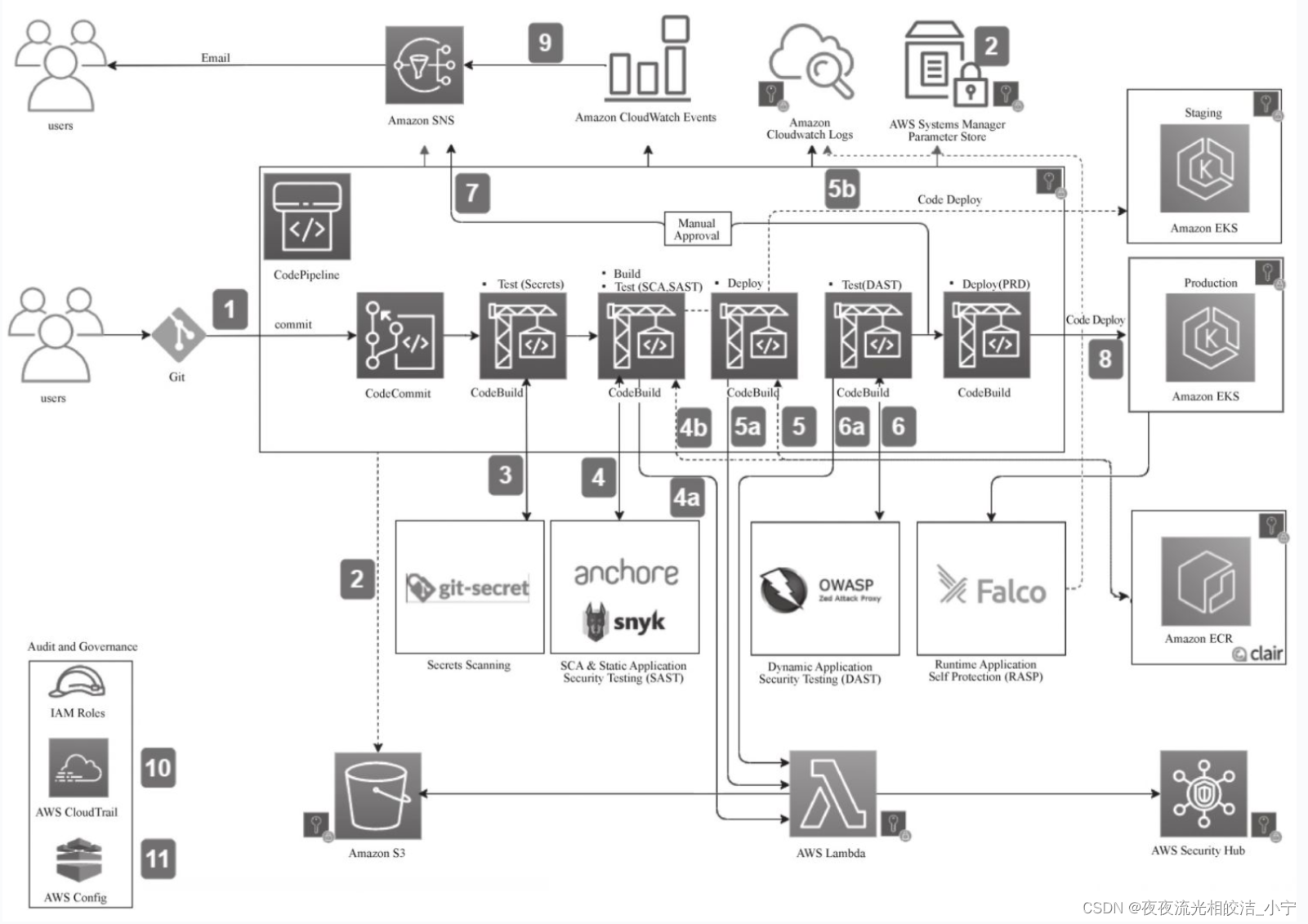
DevSecOps平台架构系列-亚马逊云AWS DevSecOps平台架构
目录 一、概述 二、AWS DevSecOps实施原则 2.1 尽早采用安全测试,加速问题反馈 2.2 优先考虑预防性安全控制 2.3 部署检测性安全控制时,确保有与之互补的响应性安全控制 2.4 安全自动化 2.5 总结 三、AWS DevSecOps关键组件 3.1 关键组件 3.2 关…...

KaTex 常用公式编辑
原文:https://blog.iyatt.com/?p7854 注:语法上和 Latex 差不多一样,我是因为 WordPress 上使用 WP Githuber MD 插件,才用的 KaTex(插件里面的 LaTex 模块有 bug,无法渲染) 希腊字母 大写代…...

域攻防渗透之委派攻击
出身寒微,不是耻辱,能屈能伸,方为丈夫。 约束性委派的利用 原理 非约束性委派被委派的机器会直接得到发布委派的用户的TGT,是十分不安全的,因此微软推出了约束性委派,还扩充kerberos协议,添加…...

优雅的使用ChromeDriver
在网页自动化测试中,我们经常需要控制浏览器执行各种操作。对于Python开发者来说,可以使用 Selenium 库来实现这一目的。Selenium需要与浏览器的驱动程序(Driver)配合使用,本文将介绍如何在Windows 11系统下载ChromeDriver并正确保存。 第一步:确定Chrome浏览器版本号 打开Ch…...

react native hooks 页面出现重绘问题,如何解决
在React Native应用中,使用Hooks导致页面出现频繁重绘或性能问题时,可以尝试以下策略来优化和解决问题: 减少不必要的状态更新: 使用 React.memo 高阶组件包裹那些不需要每次父组件状态改变时都重新渲染的子组件。它通过浅比较pro…...

kafka安装并测试
一. Linux下ZooKeeper的安装及使用 1、创建工作目录,下载安装包 #创建安装目录 mkdir -p /opt/zookeeper #移动到目录 cd /opt/zookeepe #下载zookeeper安装包 wget https://mirrors.aliyun.com/apache/zookeeper/zookeeper-3.4.14/zookeeper-3.4.14.tar.gz #解…...

flutter路由跳转
Navigator.of(context).push(); //路由跳转(模块方式) Navigator.of(context).push(MaterialPageRoute(builder: (BuildContext context) {return const Page() ;//Page()指页面}, )) Navigator.pushNamed(context, "/") //路由跳转(路由方式) Navigator.pop(cont…...

微服务项目小结1
01.微服务的概念 单体、分布式、集群 (面试用到)微服务把之前的大的应用,按照业务功能拆分成若干个小的模块,每个模块都是独立的开发,测试,上线,维护缺点: 开发成本高,众多服务出错的处理(容错),分布式事务…...

ARM处理器时钟架构与复位系统设计解析
1. ARM处理器时钟架构解析时钟系统是数字电路设计中最基础也最关键的组成部分。在ARM处理器中,时钟架构的设计直接影响着处理器的性能、功耗和稳定性。现代ARM处理器通常采用多级时钟域设计,这种架构能够有效平衡不同功能模块的性能需求和功耗限制。1.1 …...

开关电源电感设计:原理、计算与选型指南
1. 开关电源电感设计基础在开关电源设计中,电感器扮演着能量存储和滤波的双重角色。以典型的BUCK转换器为例,电感的一端连接直流输出电压,另一端则通过MOSFET交替连接输入电压或地线。这种开关动作产生的脉冲电压使得电感电流呈现周期性波动。…...

多模态大模型MING:如何让AI看懂图表并智能问答
1. 项目概述:一个多模态大语言模型的新星最近在开源社区里,一个名为“MING”的项目引起了我的注意。这个由MediaBrain-SJTU团队发布的多模态大语言模型,全称是“MING: A Multimodal Large Language Model for Interpreting Complex Graphs an…...

从账单明细看Taotoken按Token计费如何助力精细节省成本
从账单明细看Taotoken按Token计费如何助力精细节省成本 1. 账单明细的核心价值 Taotoken的账单系统提供了按Token粒度的详细消耗记录,这是实现成本精细化管理的基础。每一条API调用记录都会包含模型名称、任务类型、输入输出Token数以及对应费用。这种透明化的计费…...

ARM Cortex-X1 Trace组件架构与调试技术解析
1. ARM Cortex-X1 Fast Models Trace组件架构解析在处理器开发与调试领域,Trace技术如同给芯片装上了"黑匣子",能够完整记录执行过程中的关键事件。ARM Fast Models提供的Trace组件采用模块化架构,专门为Cortex-X1这类高性能核心设…...

私有化大模型资产管理平台CSGHub:从部署到实战的完整指南
1. 项目概述:为什么我们需要一个私有化的“Hugging Face”?如果你在AI团队里待过,尤其是负责模型研发、部署或者数据管理的岗位,大概率遇到过这样的场景:好不容易从Hugging Face上下载了一个几十GB的大模型,…...

怎样安全高效解密微信聊天记录:WechatDecrypt完整实践指南
怎样安全高效解密微信聊天记录:WechatDecrypt完整实践指南 【免费下载链接】WechatDecrypt 微信消息解密工具 项目地址: https://gitcode.com/gh_mirrors/we/WechatDecrypt WechatDecrypt是一款专业的微信消息解密工具,能够帮助用户轻松解密微信加…...

终极魔兽争霸3 Windows兼容性修复指南:简单三步解决所有游戏问题
终极魔兽争霸3 Windows兼容性修复指南:简单三步解决所有游戏问题 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper 还在为魔兽争霸3在Window…...

三步构建个人漫画图书馆:picacomic下载器的终极指南 [特殊字符]
三步构建个人漫画图书馆:picacomic下载器的终极指南 🚀 【免费下载链接】picacomic-downloader 哔咔漫画 picacomic pica漫画 bika漫画 PicACG 多线程下载器,带图形界面 带收藏夹,已打包exe 下载速度飞快 项目地址: https://git…...
库提前规避研发雷区)
避开“毒王”分子:药物化学家如何利用警示子结构(SA)库提前规避研发雷区
药物化学家的结构排雷指南:如何利用警示子结构规避研发风险 在药物研发的漫长征程中,化学家们常常面临一个残酷的现实:约90%的候选药物最终未能通过临床试验,其中近半数折戟于安全性问题。那些看似微小的分子片段——一个苯环上的…...