python保存中间变量(学习笔记)
python保存中间变量
原因:
最近在部署dust3r算法,虽然在本地部署了,也能测试出一定的结果,但是发现无法跑很多图片,为了能够测试多张图片跑出来的模型,于是就在打算在autodl上部署算法,但是由于官方给定的代码是训练好模型后通过可视化三维模型的形式来给出的效果,所以在服务器上没有办法来可视化三维模型(可能有办法,但是总是有解决不了的报错,于是便放弃)
产生思路
打算把官方中的代码分成两部分,上部分是训练好的模型output变量,将output保存下来,下载到本地上,在本地上加载output变量,进而完成后续的代码操作。
保存中间变量的方式
通过下面方式output变量会以output.pkl的文件形式保存在当前文件夹下
import pickle
output=1 #这里就是要保存的中间变量
pickle.dump(output, open('output.pkl', 'wb'))
通过下面的方式来读取刚才保存的output.pkl文件,这样就可以顺利保存下来了
f = open("output.pkl",'rb')output=pickle.loads(f.read())f.close()
原理
pickle是Python官方自带的库,提供dump函数实现Python对象的保存。支持自定义的对象,非常方便。Pandas的DataFrame和Obspy的Stream也都可以保存成pickle的格式。主要是以二进制的形式来保存成一种无逻辑的文件。
解决原来的问题
dust3r官方给的代码如下,其中服务器主要是在scene.show()这行代码中无法运行。
import osfrom dust3r.inference import inference, load_model
from dust3r.utils.image import load_images
from dust3r.image_pairs import make_pairs
from dust3r.cloud_opt import global_aligner, GlobalAlignerModeif __name__ == '__main__':model_path = "checkpoints/DUSt3R_ViTLarge_BaseDecoder_512_dpt.pth"device = 'cuda'batch_size = 4schedule = 'cosine'lr = 0.01niter = 100model = load_model(model_path, device)# load_images can take a list of images or a directory# base_dir = 'tankandtemples/tankandtemples/intermediate/M60/images/'base_dir = 'croco/assets/'# 获取当前目录下的所有文件files = [os.path.join(base_dir, file) for file in os.listdir(base_dir)]images = load_images(files, size=512)pairs = make_pairs(images, scene_graph='complete', prefilter=None, symmetrize=True)output = inference(pairs, model, device, batch_size=batch_size)# at this stage, you have the raw dust3r predictionsview1, pred1 = output['view1'], output['pred1']view2, pred2 = output['view2'], output['pred2']scene = global_aligner(output, device=device, mode=GlobalAlignerMode.PointCloudOptimizer)loss = scene.compute_global_alignment(init="mst", niter=niter, schedule=schedule, lr=lr)# retrieve useful values from scene:imgs = scene.imgsfocals = scene.get_focals()poses = scene.get_im_poses()pts3d = scene.get_pts3d()confidence_masks = scene.get_masks()# visualize reconstructionscene.show()# find 2D-2D matches between the two imagesfrom dust3r.utils.geometry import find_reciprocal_matches, xy_gridpts2d_list, pts3d_list = [], []for i in range(2):conf_i = confidence_masks[i].cpu().numpy()pts2d_list.append(xy_grid(*imgs[i].shape[:2][::-1])[conf_i]) # imgs[i].shape[:2] = (H, W)pts3d_list.append(pts3d[i].detach().cpu().numpy()[conf_i])reciprocal_in_P2, nn2_in_P1, num_matches = find_reciprocal_matches(*pts3d_list)print(f'found {num_matches} matches')matches_im1 = pts2d_list[1][reciprocal_in_P2]matches_im0 = pts2d_list[0][nn2_in_P1][reciprocal_in_P2]# visualize a few matchesimport numpy as npfrom matplotlib import pyplot as pln_viz = 10match_idx_to_viz = np.round(np.linspace(0, num_matches-1, n_viz)).astype(int)viz_matches_im0, viz_matches_im1 = matches_im0[match_idx_to_viz], matches_im1[match_idx_to_viz]H0, W0, H1, W1 = *imgs[0].shape[:2], *imgs[1].shape[:2]img0 = np.pad(imgs[0], ((0, max(H1 - H0, 0)), (0, 0), (0, 0)), 'constant', constant_values=0)img1 = np.pad(imgs[1], ((0, max(H0 - H1, 0)), (0, 0), (0, 0)), 'constant', constant_values=0)img = np.concatenate((img0, img1), axis=1)pl.figure()pl.imshow(img)cmap = pl.get_cmap('jet')for i in range(n_viz):(x0, y0), (x1, y1) = viz_matches_im0[i].T, viz_matches_im1[i].Tpl.plot([x0, x1 + W0], [y0, y1], '-+', color=cmap(i / (n_viz - 1)), scalex=False, scaley=False)pl.show(block=True)将代码分成两部分,上部分由服务器来跑,下部分由本地来跑。
import os
from dust3r.inference import inference, load_model
from dust3r.utils.image import load_images
from dust3r.image_pairs import make_pairs
from dust3r.cloud_opt import global_aligner, GlobalAlignerMode
if __name__ == '__main__':model_path = "checkpoints/DUSt3R_ViTLarge_BaseDecoder_512_dpt.pth"device = 'cuda'batch_size = 32schedule = 'cosine'lr = 0.01niter = 300model = load_model(model_path, device)# load_images can take a list of images or a directorybase_dir = 'croco/assets/'# 获取当前目录下的所有文件files = [os.path.join(base_dir, file) for file in os.listdir(base_dir)]files_new = []for i in range(0,files.__len__(),10):files_new.append(files[i])images = load_images(files_new, size=512)pairs = make_pairs(images, scene_graph='complete', prefilter=None, symmetrize=True)output = inference(pairs, model, device, batch_size=batch_size)import picklepickle.dump(output, open('output.pkl', 'wb'))
本地代码
import os
from dust3r.inference import inference, load_model
from dust3r.utils.image import load_images
from dust3r.image_pairs import make_pairs
from dust3r.cloud_opt import global_aligner, GlobalAlignerMode
if __name__ == '__main__':model_path = "checkpoints/DUSt3R_ViTLarge_BaseDecoder_512_dpt.pth"device = 'cuda'batch_size = 1schedule = 'cosine'lr = 0.01niter = 300base_dir = 'croco/assets/'# 获取当前目录下的所有文件files = [os.path.join(base_dir, file) for file in os.listdir(base_dir)]files_new = []for i in range(0,files.__len__(),4):files_new.append(files[i])print(files_new)import picklef = open("output.pkl",'rb')output=pickle.loads(f.read())f.close()view1, pred1 = output['view1'], output['pred1']view2, pred2 = output['view2'], output['pred2']scene = global_aligner(output, device=device, mode=GlobalAlignerMode.PointCloudOptimizer)loss = scene.compute_global_alignment(init="mst", niter=niter, schedule=schedule, lr=lr)# retrieve useful values from scene:imgs = scene.imgsfocals = scene.get_focals()poses = scene.get_im_poses()pts3d = scene.get_pts3d()confidence_masks = scene.get_masks()# visualize reconstructionscene.show()# find 2D-2D matches between the two imagesfrom dust3r.utils.geometry import find_reciprocal_matches, xy_gridpts2d_list, pts3d_list = [], []for i in range(2):conf_i = confidence_masks[i].cpu().numpy()pts2d_list.append(xy_grid(*imgs[i].shape[:2][::-1])[conf_i]) # imgs[i].shape[:2] = (H, W)pts3d_list.append(pts3d[i].detach().cpu().numpy()[conf_i])reciprocal_in_P2, nn2_in_P1, num_matches = find_reciprocal_matches(*pts3d_list)print(f'found {num_matches} matches')matches_im1 = pts2d_list[1][reciprocal_in_P2]matches_im0 = pts2d_list[0][nn2_in_P1][reciprocal_in_P2]# visualize a few matchesimport numpy as npfrom matplotlib import pyplot as pln_viz = 10match_idx_to_viz = np.round(np.linspace(0, num_matches-1, n_viz)).astype(int)viz_matches_im0, viz_matches_im1 = matches_im0[match_idx_to_viz], matches_im1[match_idx_to_viz]H0, W0, H1, W1 = *imgs[0].shape[:2], *imgs[1].shape[:2]img0 = np.pad(imgs[0], ((0, max(H1 - H0, 0)), (0, 0), (0, 0)), 'constant', constant_values=0)img1 = np.pad(imgs[1], ((0, max(H0 - H1, 0)), (0, 0), (0, 0)), 'constant', constant_values=0)img = np.concatenate((img0, img1), axis=1)pl.figure()pl.imshow(img)cmap = pl.get_cmap('jet')for i in range(n_viz):(x0, y0), (x1, y1) = viz_matches_im0[i].T, viz_matches_im1[i].Tpl.plot([x0, x1 + W0], [y0, y1], '-+', color=cmap(i / (n_viz - 1)), scalex=False, scaley=False)pl.show(block=True)
总结
这种解决办法也不是根本解决办法,虽然比较麻烦,但是还是能将项目跑起来,也是没有办法的办法,在此做一个笔记记录。
相关文章:
)
python保存中间变量(学习笔记)
python保存中间变量 原因: 最近在部署dust3r算法,虽然在本地部署了,也能测试出一定的结果,但是发现无法跑很多图片,为了能够测试多张图片跑出来的模型,于是就在打算在autodl上部署算法,但是由…...

CTF wed安全(攻防世界)练习题
一、Training-WWW-Robots 进入网站如图: 翻译:在这个小小的挑战训练中,你将学习Robots exclusion standard。网络爬虫使用robots.txt文件来检查它们是否被允许抓取和索引您的网站或只是其中的一部分。 有时这些文件会暴露目录结构,…...

计算机网络链路层
数据链路 链路是从一个节点到相邻节点之间的物理线路(有线或无线) 数据链路是指把实现协议的软件和硬件加到对应链路上。帧是点对点信道的数据链路层的协议数据单元。 点对点信道 通信的主要步骤: 节点a的数据链路层将网络层交下来的包添…...

VUE3——reactive对比ref
从定义数据角度对比: 。ref用来定义:基本类型数据 。reactive用来定义:对象(或数组)类型数据。 。备注:ref也可以用来定义对象(或数组)类型数据,它内部会自动通过 reactive 转为代理对象。 从原理角度对比: 。ref通过 object.defineProperty()的 get 与set 来实现响应式(数据劫…...
广场舞团系统的设计与实现|Springboot+ Mysql+Java+ B/S结构(可运行源码+数据库+设计文档)
本项目包含可运行源码数据库LW,文末可获取本项目的所有资料。 推荐阅读100套最新项目持续更新中..... 2024年计算机毕业论文(设计)学生选题参考合集推荐收藏(包含Springboot、jsp、ssmvue等技术项目合集) 目录 1. 系…...
经典永不过时 Wordpress模板主题
经得住时间考验的模板,才是经典模板,带得来客户的网站,才叫NB网站。 https://www.jianzhanpress.com/?p2484...
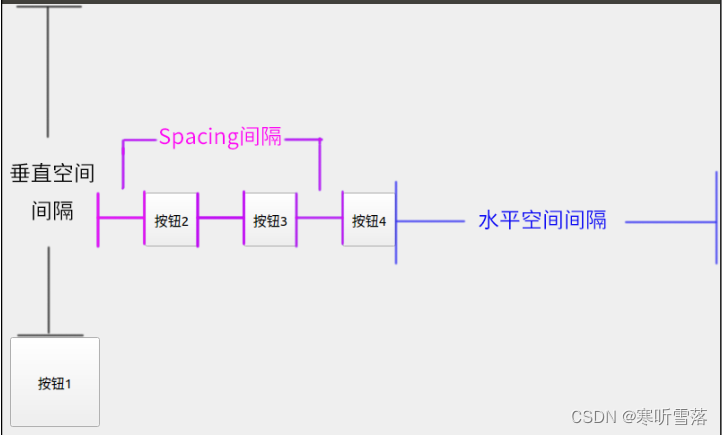
QT布局管理和空间提升为和空间间隔
QHBoxLayout:按照水平方向从左到右布局; QVBoxLayout:按照竖直方向从上到下布局; QGridLayout:在一个网格中进行布局,类似于HTML的table; 基本布局管理类包括:QBoxLayout、QGridL…...
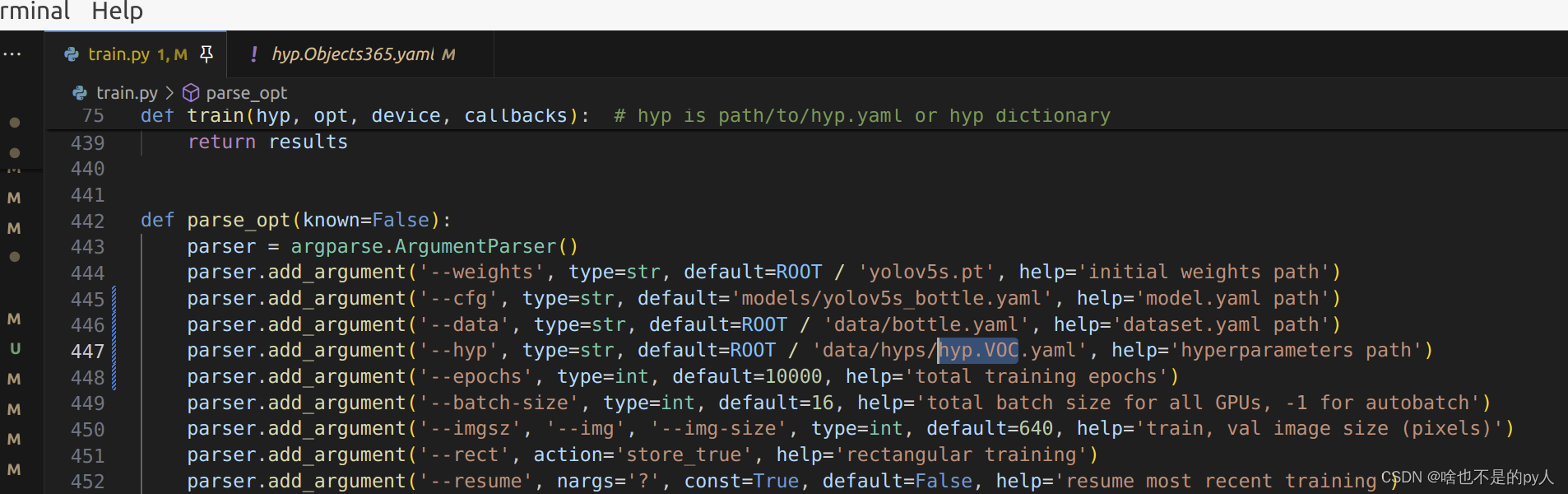
Yolo 自制数据集dect训练改进
上一文请看 Yolo自制detect训练-CSDN博客 简介 如下图: 首先看一下每个图的含义 loss loss分为cls_loss, box_loss, obj_loss三部分。 cls_loss用于监督类别分类,计算锚框与对应的标定分类是否正确。 box_loss用于监督检测框的回归,预测框…...

vlan间单臂路由
【项目实践4】 --vlan间单臂路由 一、实验背景 实验的目的是在一个有限的网络环境中实现VLAN间的通信。网络环境包括两个交换机和一个路由器,交换机之间通过Trunk链路相连,路由器则连接到这两个交换机的Trunk端口上。 二、案例分析 在网络工程中&#…...
day4 linux上部署第一个nest项目(java转ts全栈/3R教室)
背景:上一篇吧nest-vben-admin项目,再开发环境上跑通了,并且build出来了dist文件,接下来再部署到linux试试吧 dist文件夹是干嘛的? 一个pnpn install 直接生成了两个dist文件夹,前端admin项目一个…...
学会这几点,是搭建产品知识库的关键
现如今,企业都特别看重产品知识库,因为有了它,企业就能更好地管理产品信息,提升客户服务水平,还能帮企业做决策。但是,搭建一个好用、高效的产品知识库,也难倒了不少人。下面,我们一…...

MySql 常用的聚合函数总结
MySQL 中的聚合函数用于对一组数据进行计算,并返回单个值作为结果。以下是常用的 MySQL 聚合函数的总结及其功能描述: 1. COUNT() 功能:用于计算指定列或表中的行数。 语法: COUNT(*) COUNT(expression) 示例: SELECT …...

Charles for Mac 强大的网络调试工具
Charles for Mac是一款功能强大的网络调试工具,可以帮助开发人员和测试人员更轻松地进行网络通信测试和调试。以下是一些Charles for Mac的主要特点: 软件下载:Charles for Mac 4.6.6注册激活版 流量截获:Charles可以截获和分析通…...
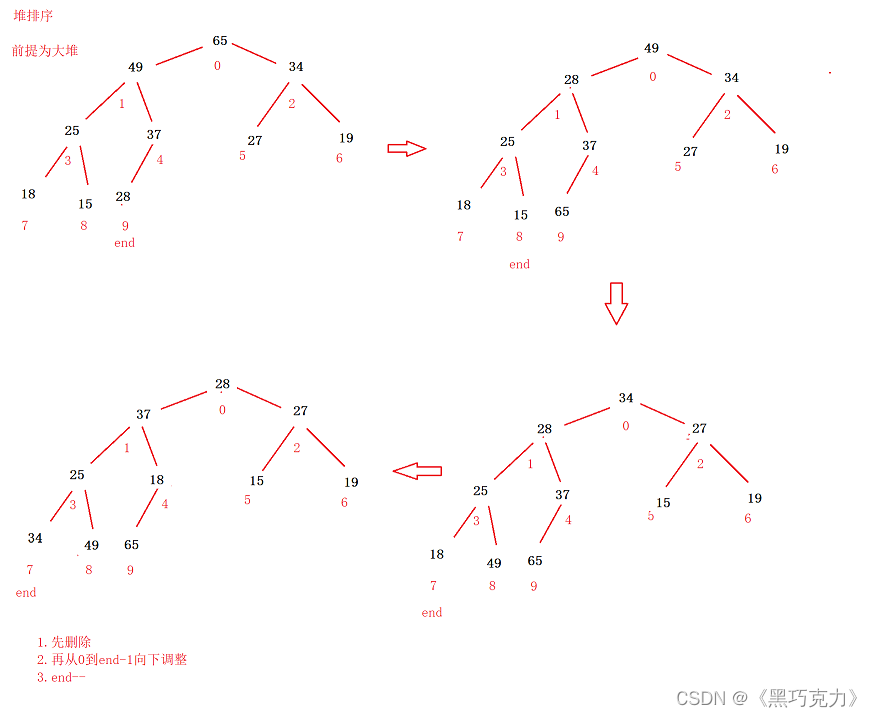
【数据结构】优先级队列——堆
🧧🧧🧧🧧🧧个人主页🎈🎈🎈🎈🎈 🧧🧧🧧🧧🧧数据结构专栏🎈🎈🎈&…...

【力扣】45.跳跃游戏Ⅱ
45.跳跃游戏Ⅱ 给定一个长度为 n 的 0 索引整数数组 nums。初始位置为 nums[0]。 每个元素 nums[i] 表示从索引 i 向前跳转的最大长度。换句话说,如果你在 nums[i] 处,你可以跳转到任意 nums[i j] 处: 0 < j < nums[i]i j < n 返回到达 n…...

containerd使用了解
containerd使用了解 yum安装 [rootvm ~]# curl -o /etc/yum.repos.d/docker.repo http://mirrors.aliyun.com/docker-ce/linux/centos/docker-ce.repo [rootvm ~]# yum list | grep containerd containerd.io.x86_64 1.6.28-3.1.el7 doc…...

gateway 分发时若两个服务的路由地址一样,怎么指定访问想要的服务下的地址
1.思路 在使用Spring Cloud Gateway时,如果两个服务的路由地址相同,可以通过Predicate(断言)和Filter(过滤器)的组合来实现根据请求的不同条件将请求分发到不同的服务下的地址。 使用Predicate进行路由条件…...

【LeetCode】三月题解
文章目录 [2369. 检查数组是否存在有效划分](https://leetcode.cn/problems/check-if-there-is-a-valid-partition-for-the-array/)思路:代码: [1976. 到达目的地的方案数](https://leetcode.cn/problems/number-of-ways-to-arrive-at-destination/) 思路…...

云手机:实现便携与安全的双赢
随着5G时代的到来,云手机在各大游戏、直播和新媒体营销中扮演越来越重要的角色。它不仅节约了成本,提高了效率,而且在边缘计算和云技术逐渐成熟的背景下,展现出了更大的发展机遇。 云手机的便携性如何? 云手机的便携性…...
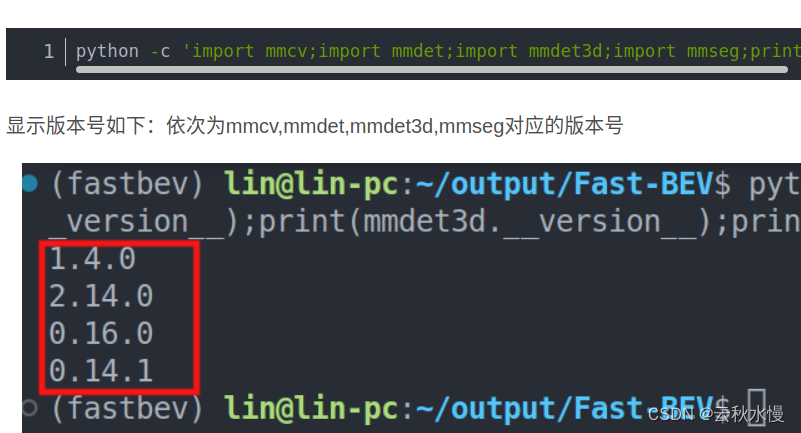
fast_bev学习笔记
目录 一. 简述二. 输入输出三. github资源四. 复现推理过程4.1 cuda tensorrt 版 一. 简述 原文:Fast-BEV: A Fast and Strong Bird’s-Eye View Perception Baseline FAST BEV是一种高性能、快速推理和部署友好的解决方案,专为自动驾驶车载芯片设计。该框架主要包…...
Cesium相机控制)
三维GIS开发cesium智慧地铁教程(5)Cesium相机控制
一、环境搭建 <script src"../cesium1.99/Build/Cesium/Cesium.js"></script> <link rel"stylesheet" href"../cesium1.99/Build/Cesium/Widgets/widgets.css"> 关键配置点: 路径验证:确保相对路径.…...

PHP和Node.js哪个更爽?
先说结论,rust完胜。 php:laravel,swoole,webman,最开始在苏宁的时候写了几年php,当时觉得php真的是世界上最好的语言,因为当初活在舒适圈里,不愿意跳出来,就好比当初活在…...

【Java学习笔记】Arrays类
Arrays 类 1. 导入包:import java.util.Arrays 2. 常用方法一览表 方法描述Arrays.toString()返回数组的字符串形式Arrays.sort()排序(自然排序和定制排序)Arrays.binarySearch()通过二分搜索法进行查找(前提:数组是…...
无法与IP建立连接,未能下载VSCode服务器
如题,在远程连接服务器的时候突然遇到了这个提示。 查阅了一圈,发现是VSCode版本自动更新惹的祸!!! 在VSCode的帮助->关于这里发现前几天VSCode自动更新了,我的版本号变成了1.100.3 才导致了远程连接出…...
SCAU期末笔记 - 数据分析与数据挖掘题库解析
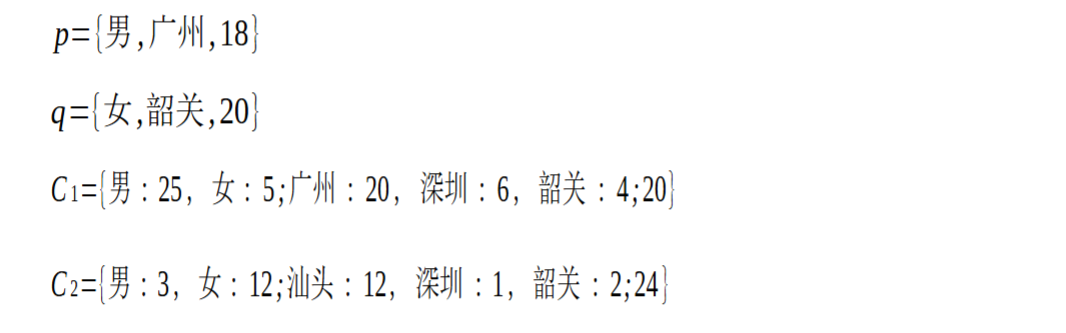
这门怎么题库答案不全啊日 来简单学一下子来 一、选择题(可多选) 将原始数据进行集成、变换、维度规约、数值规约是在以下哪个步骤的任务?(C) A. 频繁模式挖掘 B.分类和预测 C.数据预处理 D.数据流挖掘 A. 频繁模式挖掘:专注于发现数据中…...
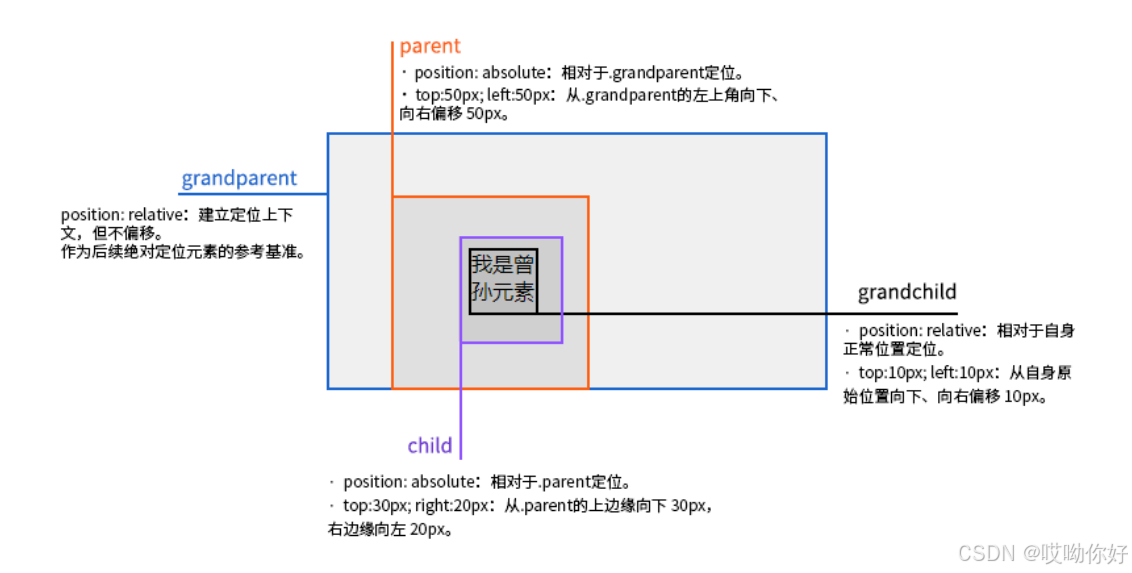
【CSS position 属性】static、relative、fixed、absolute 、sticky详细介绍,多层嵌套定位示例
文章目录 ★ position 的五种类型及基本用法 ★ 一、position 属性概述 二、position 的五种类型详解(初学者版) 1. static(默认值) 2. relative(相对定位) 3. absolute(绝对定位) 4. fixed(固定定位) 5. sticky(粘性定位) 三、定位元素的层级关系(z-i…...

工业自动化时代的精准装配革新:迁移科技3D视觉系统如何重塑机器人定位装配
AI3D视觉的工业赋能者 迁移科技成立于2017年,作为行业领先的3D工业相机及视觉系统供应商,累计完成数亿元融资。其核心技术覆盖硬件设计、算法优化及软件集成,通过稳定、易用、高回报的AI3D视觉系统,为汽车、新能源、金属制造等行…...
的原因分类及对应排查方案)
JVM暂停(Stop-The-World,STW)的原因分类及对应排查方案
JVM暂停(Stop-The-World,STW)的完整原因分类及对应排查方案,结合JVM运行机制和常见故障场景整理而成: 一、GC相关暂停 1. 安全点(Safepoint)阻塞 现象:JVM暂停但无GC日志,日志显示No GCs detected。原因:JVM等待所有线程进入安全点(如…...

dify打造数据可视化图表
一、概述 在日常工作和学习中,我们经常需要和数据打交道。无论是分析报告、项目展示,还是简单的数据洞察,一个清晰直观的图表,往往能胜过千言万语。 一款能让数据可视化变得超级简单的 MCP Server,由蚂蚁集团 AntV 团队…...
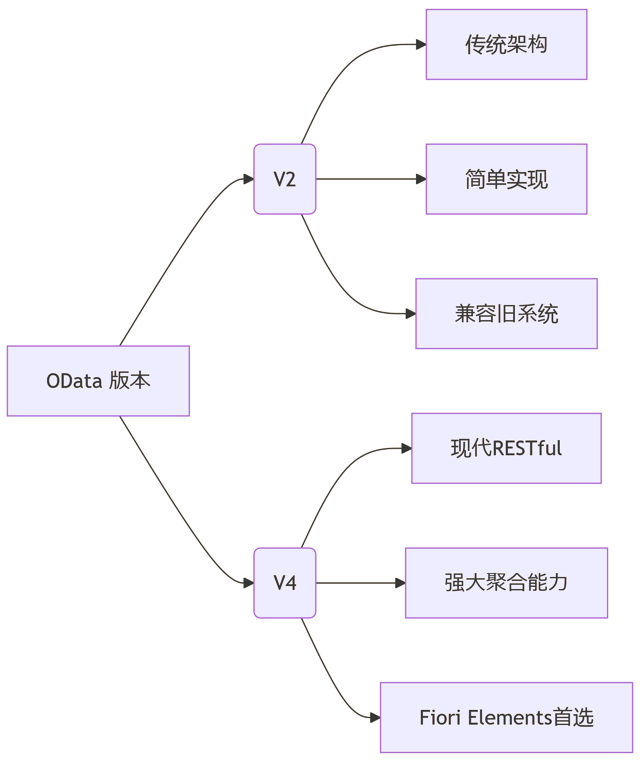
SAP学习笔记 - 开发26 - 前端Fiori开发 OData V2 和 V4 的差异 (Deepseek整理)
上一章用到了V2 的概念,其实 Fiori当中还有 V4,咱们这一章来总结一下 V2 和 V4。 SAP学习笔记 - 开发25 - 前端Fiori开发 Remote OData Service(使用远端Odata服务),代理中间件(ui5-middleware-simpleproxy)-CSDN博客…...