EtherCAT运动控制器Delta机械手应用
ZMC406硬件介绍
ZMC406是正运动推出的一款多轴高性能EtherCAT总线运动控制器,具有EtherCAT、EtherNET、RS232、CAN和U盘等通讯接口,ZMC系列运动控制器可应用于各种需要脱机或联机运行的场合。

ZMC406支持6轴运动控制,最多可扩展至32轴,支持直线插补、任意圆弧插补、空间圆弧、螺旋插补、电子凸轮、电子齿轮、同步跟随等功能。
ZMC406支持PLC、Basic、HMI组态三种编程方式。PC上位机API编程支持C#、C++、LabVIEW、Matlab、Qt、Linux、VB.Net、Python等接口。

ZMC406支持6轴运动控制,可采用脉冲轴(带编码器反馈)或EtherCAT总线轴,通用IO包含24路输入口和12路输出口,模拟量AD/DA各两路,EtherCAT最快125us的刷新周期。
此类运动控制器与PCI运动控制卡相比具有如下优点:
(1)不使用插槽,稳定性更好;
(2)可以选用MINI电脑或ARM工控电脑,降低整体成本;
(3)控制器直接做接线板使用,节省空间;
(4)控制器上可以并行运行程序,与PC只需要简单交互,降低PC软件的复杂性等优势。
ZMC控制器通过RTSys开发环境来调试,RTSys是一个方便的编程、编译和调试环境。RTSys可以通过串口、以太网、PCI和LOCAL与控制器建立连接。应用程序可以使用VC,VB,VS,C++Builder,C#等软件来开发。调试时可以把RTSys软件同时连接到控制器,程序运行时需要动态库zmotion.dll。
Delta机械手支持3-4轴,关节轴1+关节轴2+关节轴3+[末端旋转轴4]。后缀带R的控制器支持Delta机械手功能,例如ZMC406R。
ZMC406R可以采用脱机的方式将编辑好的程序下载到控制器上,可利用触摸屏示教的方式编辑想要运动的轨迹。也可以用PC API函数调用方式或者实时发送指令操作,在PC上位机C#,C++,Labview,Python等语言来开发Delta机械手的应用。

▶▶▶ 机械手相关概念
1、关节轴与虚拟轴
(1)关节轴:是指实际机械结构中的旋转关节,在程序中一般显示旋转角度(某些结构也是平移轴)。由于电机与旋转关节会存在减速比,所以设置脉冲当量UNITS(电机走1mm或者1°需要的脉冲数)时要按照实际关节旋转一圈来设置,同时TABLE中填写结构参数时也要按照旋转关节中心计算,而不是按照电机轴中心计算。
(2)虚拟轴:不是实际存在的,抽象为世界坐标系的6个自由度,依次为X、Y、Z、RX、RY、RZ。可以理解为直角坐标系的三个直线轴和三个旋转轴,用来确定机械手末端工作点的加工轨迹与坐标。
2、正解运动与逆解运动
(1)正解运动:通过操作关节坐标,再根据机械结构参数可以计算出末端位置在直角坐标系的空间位置,这个过程称为正解运动。此时操作的是实际关节轴,虚拟轴自动计算坐标。此时只能操作关节轴运动,正解模式一般用于手动调整关节位置或上电点位回零。
(2)逆解运动:给定一个直角坐标系中的空间位置,反推出各关节轴坐标,这个过程称为逆解运动。此时操作的是虚拟轴,实际关节轴自动解算坐标并运动。控制器使用CONNFRAME指令建立逆解模式,此指令作用在关节轴上,此时只能操作虚拟轴,对虚拟轴发送运动指令,可以在笛卡尔坐标系中做直线,圆弧,空间圆弧等运动,关节轴在CONNFRAME的作用下会自动运动到逆解后的位置。
▶▶▶ 机械手使用操作步骤
1、确认电机转向是否正确。
3个关节轴向下旋转时为正向。末端旋转轴逆时针旋转为正向(俯视)。连接上机械手仿真工具,通过Rtsys软件菜单栏的【工具】-【手动运动】,以较小的速度分别操作3个关节轴移动,观察各个关节轴下杆移动过程中是否趋向末端工作点,若是则说明电机转向是正确的。

2、TABLE寄存器(控制器上电后自动生成)依次存入机械手结构参数。
建立机械手连接时,需要将机械结构参数按照如下次序依次填写到TABLE数组中。Delta机械手FRAME12模型机械结构参数说明如下。


‘从TableNum编号开始依次机械手结构参数上间距半径、下间距半径、上杆长度、下杆长度、第一个关节轴旋转一圈的脉冲数、第二个关节轴旋转一圈的脉冲数、第三个关节轴旋转一圈的脉冲数、末端与下面中心点的X偏移、末端与下面中心点的Y偏移、末端与下面中心点的Z偏移、第四个关节轴旋转一圈的脉冲数到Table中。
TABLE(TableNum,Top_R,Under_R,Top_L,Under_L,OneCirPules_J1,OneCirPules_J2,OneCirPules_J3,Offset_X,Offset_Y,Offset_Z,OneCirPules_J4)
3、设置关节轴参数及虚拟轴参数。
各轴的轴类型和脉冲当量(units)要设置正确,设置为电机走1°需要的脉冲数。虚拟轴的units跟实际发送脉冲数无关,用于设置运动精度,虚拟轴的1mm的脉冲数一般建议设置为1000,表示精度为小数点后3位。
'关节轴设置
BASE(Axis_JList(0),Axis_JList(1),Axis_JList(2),Axis_JList(3))
'脉冲轴类型设置为1。若是总线轴类型,可设置为65
ATYPE = 1,1,1,1
UNITS = UnitsJList(0),UnitsJList(1),UnitsJList(2),UnitsJList(3)
'设置关节轴速度、加速度(一般设置为速度的10倍)、减速度(一般设置为速度的10倍)
SPEED = SpeedJList(0),SpeedJList(1),SpeedJList(2),SpeedJList(3)
ACCEL = ADSpeedJList(0),ADSpeedJList(1),ADSpeedJList(2),ADSpeedJList(3)
DECEL = ADSpeedJList(0),ADSpeedJList(1),ADSpeedJList(2),ADSpeedJList(3)
'S曲线
SRAMP = SrampJ(0),SrampJ(1),SrampJ(2),SrampJ(3)
'虚拟轴设置
BASE(Axis_VList(0),Axis_VList(1),Axis_VList(2))
'虚拟轴轴类型设置为0
ATYPE = 0,0,0
'虚拟轴脉冲当量设置为1000--表示精度为小数点后3位
UNITS = 1000,1000,1000
'设置虚拟轴速度、加速度(一般设置为速度的10倍)、减速度(一般设置为速度的10倍)
SPEED = SpeedVList(0),SpeedVList(1),SpeedVList(2)
ACCEL = AccelV(0),AccelV(1),AccelV(2)
DECEL = DecelV(0),DecelV(1),DecelV(2)
'S曲线
SRAMP = SrampV(0),SrampV(1),SrampV(2)
4、移动各关节轴到规定的零点位置。
机械手算法建立时,需要有个零点位置作为参考。当Delta机械手各关节轴的连杆L1都处于水平位置时,认为是关节零点位置。实际现场机械手机台一般有定位销,没有定位销的话可以通过水平仪把连杆L1调整至水平。

5、根据需求建立正解或逆解控制机械手。
▶▶▶ 机械手指令说明
不同的机械手模型参数是有差异的,可通过“正运动机械手指令手册说明”(文章末尾扫码查看),查阅对应的机械手模型参数进行确认选择。
本文以Delta的FRAME12模型(有末端旋转轴,使用关节轴操作旋转轴)为例介绍,机械手正解与逆解的指令说明如下。

1、CONNREFRAME – 建立正解连接
指令描述:将虚拟轴的坐标与关节轴的坐标关联,关节轴运动后,虚拟轴自动走到相应的位置。
指令语法:
CONNREFRAME(frame,tablenum,Axis_J1,Axis_J2,Axis_J3,Axis_J4)
参数说明:
frame:坐标系类型。参考【正运动机械手指令手册说明】,frame是12,代表这款机械手模型是4轴Delta且关节轴操作末端旋转轴。
Tablenum:存储机械手结构参数的TABLE起始位置,依次存储对应模型的机械手结构参数。
Axis_J1:第1个关节轴轴号
Axis_J2:第2个关节轴轴号
Axis_J3:第3个关节轴轴号
Axis_J4:第4个关节轴轴号
2、CONNFRAME – 建立逆解连接
指令描述:将当前关节坐标系的目标位置与虚拟坐标系的位置关联;关节坐标系的运动最大速度受SPEED参数的限制;当关节轴告警等出错时,此运动会被CANCEL。
指令语法:
CONNFRAME(frame,tablenum,Axis_Vx,Axis_Vy,Axis_Vz,Axis_J4)
参数说明:
frame:坐标系类型。参考【正运动机械手指令手册说明】,frame是12,代表这款机械手模型是4轴Delta且关节轴操作末端旋转轴。
Tablenum:存储机械手结构参数的TABLE起始位置,依次存储对应模型的机械手结构参数。
Axis_Vx:第1个虚拟轴轴号
Axis_Vy:第2个虚拟轴轴号
Axis_Vz:第3个虚拟轴轴号
Axis_J4:第4个关节轴轴号
▶▶▶ Delta机械手模式建立
1、正解建立
以Delta机械手的Frame12模型为例。先将机械手结构参数从某个Table起始编号依次存储到Table数组中,然后选择对应模型的轴列表,使用CONNREFRAME指令建立正解模式。
指令说明可通过Rtsys软件菜单栏的【常用】-【帮助文档】-【RTBasic帮助】-【索引】,在查找栏搜索CONNREFRAME即可查看。
'将机械手参数从编号TableNum开始依次存储到Table数组中
TABLE(TableNum,Top_R,Under_R,Top_L,Under_L,OneCirPules_J1,OneCirPules_J2,OneCirPules_J3,Offset_X,Offset_Y,Offset_Z,OneCirPules_J4)
'选择轴列表
BASE(Axis_Vx,Axis_Vy,Axis_Vz,Axis_J4)
'建立机械手正解
CONNREFRAME(FrameType,TableNum,Axis_J1,Axis_J2,Axis_J3,Axis_J4)
若机械手正解建立成功,虚拟轴MTYPE(当前运动类型)将显示为34,此时只能操作关节轴在关节坐标系中调整机械手姿态,手动运动可通过RTSys软件菜单栏的【工具】-【手动运动】,待【手动运动】界面弹出之后选择关节轴轴编号(本文关节轴以轴0,轴1,轴2,末端旋转轴轴3为例),然后根据实际需求选择点动或者寸动。虚拟轴会自动计算末端工作点位于直角坐标系中的位置。


2、逆解建立
以Delta机械手的Frame12模型为例。先将机械手结构参数从某个Table起始编号依次存储到Table数组中,然后选择对应模型的轴列表,使用CONNFRAME指令建立正解模式。指令说明可通过Rtsys软件工具栏的【常用】-【帮助文档】-【RTBasic帮助】-【索引】,在查找栏搜索CONNFRAME查看。
'将机械手参数从编号TableNum开始依次存储到Table数组中
TABLE(TableNum,Top_R,Under_R,Top_L,Under_L,OneCirPules_J1,OneCirPules_J2,OneCirPules_J3,Offset_X,Offset_Y,Offset_Z,OneCirPules_J4)
'选择轴列表
BASE(Axis_J1,Axis_J2,Axis_J3,Axis_J4)
'建立机械手逆解
CONNFRAME(FrameType,TableNum,Axis_Vx,Axis_Vy,Axis_Vz,Axis_J4)
若机械手逆解建立成功,关节轴MTYPE(当前运动类型)将显示为33,【手动运动】界面操作虚拟轴方法同上。此时加工工艺指令只能操作虚拟轴,事先编辑好运动的轨迹在直角坐标系中运动(本文虚拟轴以轴10,轴11,轴12为例),关节轴会自动计算在关节坐标系中如何联合运动。


▶▶▶ 程序编辑
RTSys软件支持Basic,HMI与PLC混合编程,本例程采用Basic结合HMI界面混合编程进行演示。可通过RTSys软件菜单栏的【HMI】-【工具箱】,选择控件进行拖拉摆放,设计交互界面。

在本次例程中均先在bas文件中定义全局的SUB子函数,编辑子函数的功能(工程源码见文章末尾)需求然后使用控件绑定,控件的动作均选择调用函数。操作流程如下图。

▶▶▶ 应用例程
1、需求描述
Delta机械手逆解建立时以零点位置为参考,确定一个安全高度。基本动作为机械手上升到安全高度去固定的取料点上方,然后下降打开Op口通过真空吸的方式去取料,延时抬升到安全高度然后运动到固定的2*2码盘位置,下降到码盘位置关闭Op进行放料,然后抬升依次循环直到将码盘放满后停止。
2、加工代码
'启动标志位置1
StartFlag = 1
LOCAL SafeHigh,i
'安全高度
SafeHigh = DPOS(Axis_VList(2))-25
'行,列
LOCAL Row,Col
'固定的取料点位置
LOCAL SrcBorrow_X,SrcBorrow_Y,SrcBorrow_Z
SrcBorrow_X = 5
SrcBorrow_Y = 5
SrcBorrow_Z = SafeHigh-20
'选择虚拟轴
BASE(Axis_VList(0),Axis_VList(1),Axis_VList(2))
'设置加工的速度、加速度、减速度
SPEED = SpeedVList(0)
ACCEL = AccelV(0)
DECEL = DecelV(0)
'打开连续插补
MERGE = ON
'每次启动临时总数清零
TmpSum = 0
'运动到零点位置参考的安全高度
MOVEABS(0,0,SafeHigh)
FOR Col=1 TO 2FOR Row=1 TO 2'运动到取料点上方MOVEABS(SrcBorrow_X,SrcBorrow_Y,SafeHigh)'下降到取料点MOVEABS(SrcBorrow_X,SrcBorrow_Y,SrcBorrow_Z)'打开Op口吸附取料MOVE_OP(8,ON)'延时MOVE_DELAY(300)'上升到安全高度MOVEABS(SrcBorrow_X,SrcBorrow_Y,SafeHigh)'运动到码盘放料点上方位置MOVEABS(-5*Row,5*Col,SafeHigh)'下降到码盘放料点位置MOVEABS(-5*Row,5*Col,SrcBorrow_Z)'关闭Op口进行放料MOVE_OP(8,OFF)'延时 MOVE_DELAY(300)'上升到安全高度MOVEABS(-5*Row,5*Col,SafeHigh)'临时总数自增TmpSum = TmpSum+1NEXT
NEXT
'等待所有轴停止
WAIT UNTIL IDLE(Axis_VList(0)) AND IDLE(Axis_VList(1)) AND IDLE(Axis_VList(2))
DELAY(10)
RAPIDSTOP(2)
DELAY(10)
'启动标志位置0
StartFlag = 0
▶▶▶ 调试分析
1、将程序下载到控制器运行,先后点击RTSys软件菜单栏的【工具】-【插件】-【XPLC SCREEN】。

2、待交互界面弹出后,在主界面机械手模式选择”机械手正解”。

3、建立正解连接之后,打开正运动机械手仿真软件ZRobotView,点击“连接”弹出”连接控制器”窗口,然后选择连接控制器的方式(仿真工具支持串口和网口连接)。这里以网口连接为例,在IP栏选择控制器的IP然后进行连接。

4、连接成功后,仿真工具上方会显示当前机械手类别,程序中存入Table中的机械手结构参数仿真工具也可以查看,且构建出相应参数的机械手模型。

5、切换到RTSys编程软件,先后点击菜单栏的【常用】-【示波器】。待示波器窗口弹出后选择XYZ模式,从三维空间观察动作演示效果。数据源选择DPOS(规划位置),数据源编号选择虚拟轴轴号。示波器参数确认后,先后点击【停止】-【启动】-【手动触发】。

6、切换到交互界面,在主界面机械手模式选择”机械手逆解”,建立逆解模式。然后点击“启动”,进行需求工艺的加工流程。

7、切换到RTSys软件的示波器界面观察加工效果,Delta机械手每次来回取放料过程,始终保持在安全高度下进行升降,这样确保在实际加工的平稳性。

教学视频。
EtherCAT运动控制器Delta机械手应用

本次,正运动技术EtherCAT运动控制器Delta机械手应用,就分享到这里。
更多精彩内容请关注“正运动小助手”公众号,需要相关开发环境与例程代码,请咨询正运动技术销售工程师。
本文由正运动技术原创,欢迎大家转载,共同学习,一起提高中国智能制造水平。文章版权归正运动技术所有,如有转载请注明文章来源。

相关文章:
EtherCAT运动控制器Delta机械手应用
ZMC406硬件介绍 ZMC406是正运动推出的一款多轴高性能EtherCAT总线运动控制器,具有EtherCAT、EtherNET、RS232、CAN和U盘等通讯接口,ZMC系列运动控制器可应用于各种需要脱机或联机运行的场合。 ZMC406支持6轴运动控制,最多可扩展至32轴&#…...

物联网杀虫灯—新型的环保杀虫设备
型号推荐:云境天合TH-FD2S】物联网杀虫灯是一种新型环保杀虫设备,其中风吸式太阳能杀虫灯作为其一种特殊类型,展现了独特的工作原理和优势。 风吸式太阳能杀虫灯以太阳能电池板为电源,白天储存电源,晚上为杀虫灯提供电…...

加盟零食店的真是大冤种
关注卢松松,会经常给你分享一些我的经验和观点。 我一朋友,在老家县城去年失业没事干,手里有一点钱但不多,就想着自己干点啥 。最后经多方打听考察,加盟了一个零食店,前前后后花去了近五六十万,…...
力扣刷题--数组--第三天
今天再做两道二分查找的题目,关于二分查找的知识可看我前两篇博客。话不多说,直接开干! 题目1:69.x 的平方根 题目详情: 给你一个非负整数 x ,计算并返回 x 的 算术平方根 。由于返回类型是整数&#…...

开源即时通讯IM框架 MobileIMSDK v6.5 发布
一、更新内容简介 本次更新为次要版本更新,进行了bug修复和优化升级(更新历史详见:码云 Release Notes、Github Release Notes)。 MobileIMSDK 可能是市面上唯一同时支持 UDPTCPWebSocket 三种协议的同类开源IM框架。轻量级、高…...

React 第二十七章 Hook useMemo
useMemo 函数可以用于缓存计算结果,以避免不必要的重复计算。 在React的函数组件中,当组件重新渲染时,函数组件内的所有代码都会重新执行。有些计算可能是非常消耗资源的,例如进行复杂的计算或进行网络请求。如果这些计算的结果在…...
自己写的爬虫小案例
网址:aHR0cDovL2pzc2NqZ3B0Lmp4d3JkLmdvdi5jbi8/dXJsPS92aWV3L3dvcmtpbmdVbml0L3dvcmtpbmdVbml0Lmh0bWw 这串代码能够爬取勘察单位企业的详细信息。 import requests import time import csv f open(勘察单位公司信息.csv,w,encodingutf-8,newline) csv_writer …...

Kafka 环境搭建和使用之单机模式详细教程
上一篇:Kakfa 简介及相关组件介绍 下一篇:Kafka 环境搭建之伪分布式集群详细教程 Kafka 环境搭建 Kafka的环境搭建可以根据不同的需求和场景采取不同的模式,主要包括以下几种: 单机模式(Standalone Mode): 在这种模式下,Kafka、Zookeeper 以及生产者和消费者都在同一…...
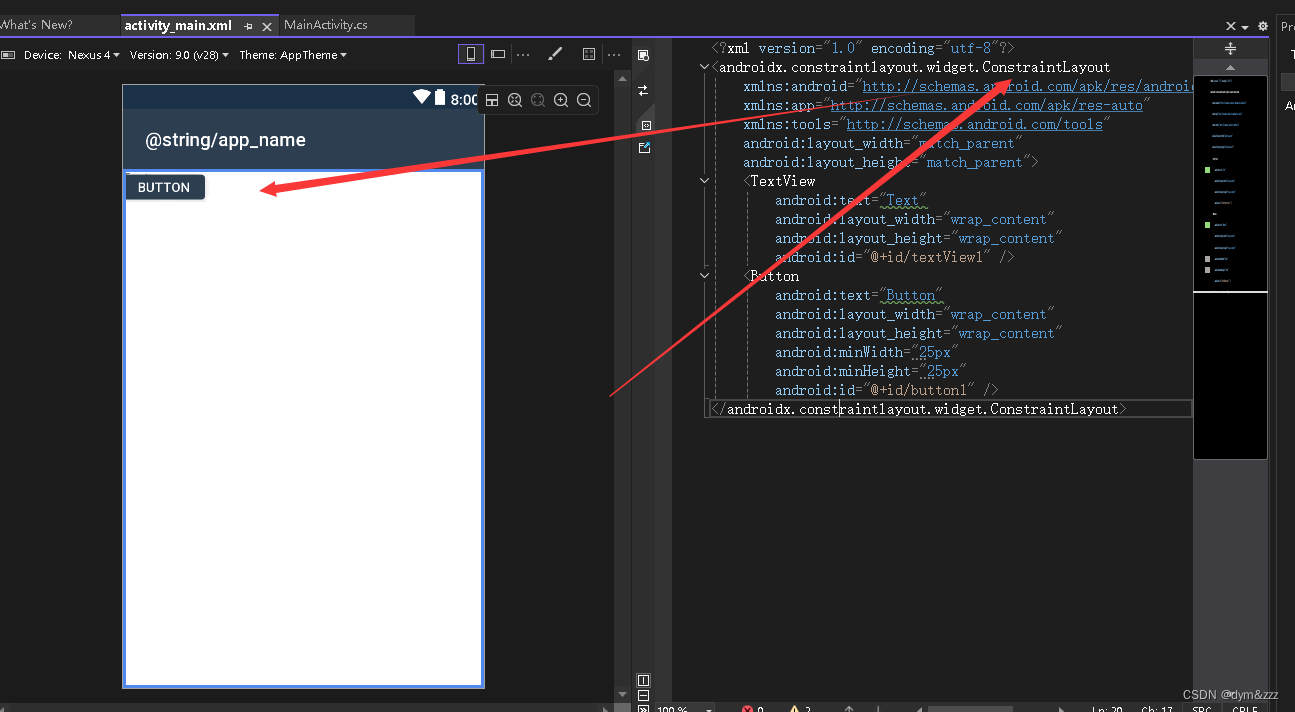
Xamarin.Android项目使用ConstraintLayout约束布局
Xamarin.AndroidX.ConstraintLayout Xamarin.Android.Support.Constraint.Layout Xamarin.AndroidX.ConstraintLayout.Solver Xamarin.AndroidX.DataBinding.ViewBinding Xamarin.AndroidX.Legacy.Support.Core.UI Xamarin.AndroidX.Lifecycle.LiveData ![在这里插入图片描述]…...

探索Java 18:未来技术趋势与革新之路
Java,作为一门历史悠久而又历久弥新的编程语言,始终站在技术发展的前沿,引领着软件开发的潮流。随着Java 18的发布,我们再次见证了这门语言的自我迭代与革新。本文将深入探讨Java 18带来的新特性、技术趋势,以及它如何…...
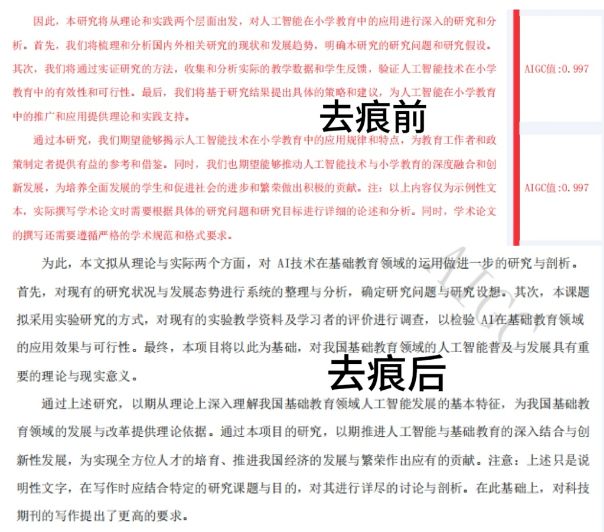
毕业论文怎么写? 推荐4个AI工具
写作这件事一直让我们从小学时期就开始头痛,初高中时期800字的作文让我们焦头烂额,一篇作文里用尽了口水话,拼拼凑凑才勉强完成。 大学时期以为可以轻松顺利毕业,结果毕业前的最后一道坎拦住我们的是毕业论文,这玩意不…...
JVM认识之垃圾收集算法
一、标记-清除算法 1、定义 标记-清除算法是最基础的垃圾收集算法。它分为标记和清除两个阶段。先标记出所有需要回收的对象(即垃圾),在标记完成后再统一回收所有垃圾对象。 2、优点和缺点 优点:实现简单缺点: 可能…...

docker-compose部署gitlab
需要提前安装docker和docker-compose环境 参考:部署docker-ce_安装部署docker-ce-CSDN博客 参考:docker-compose部署_docker compose部署本地tar-CSDN博客 创建gitlab的数据存放目录 mkdir /opt/gitlab && cd mkdir /opt/gitlab mkdir {conf…...
Colab/PyTorch - 001 PyTorch Basics
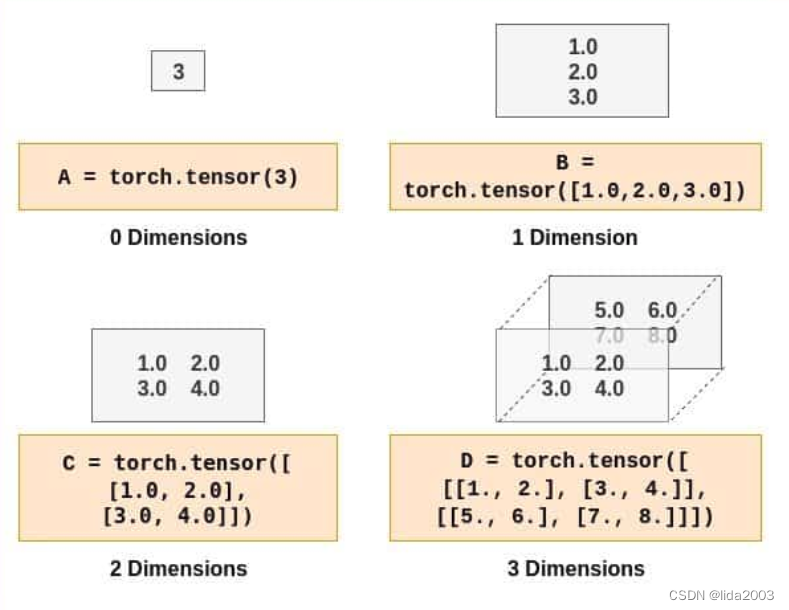
Colab/PyTorch - 001 PyTorch Basics 1. 源由2. PyTorch库概览3. 处理过程2.1 数据加载与处理2.2 构建神经网络2.3 模型推断2.4 兼容性 3. 张量介绍3.1 构建张量3.2 访问张量元素3.3 张量元素类型3.4 张量转换(NumPy Array)3.5 张量运算3.6 CPU v/s GPU …...
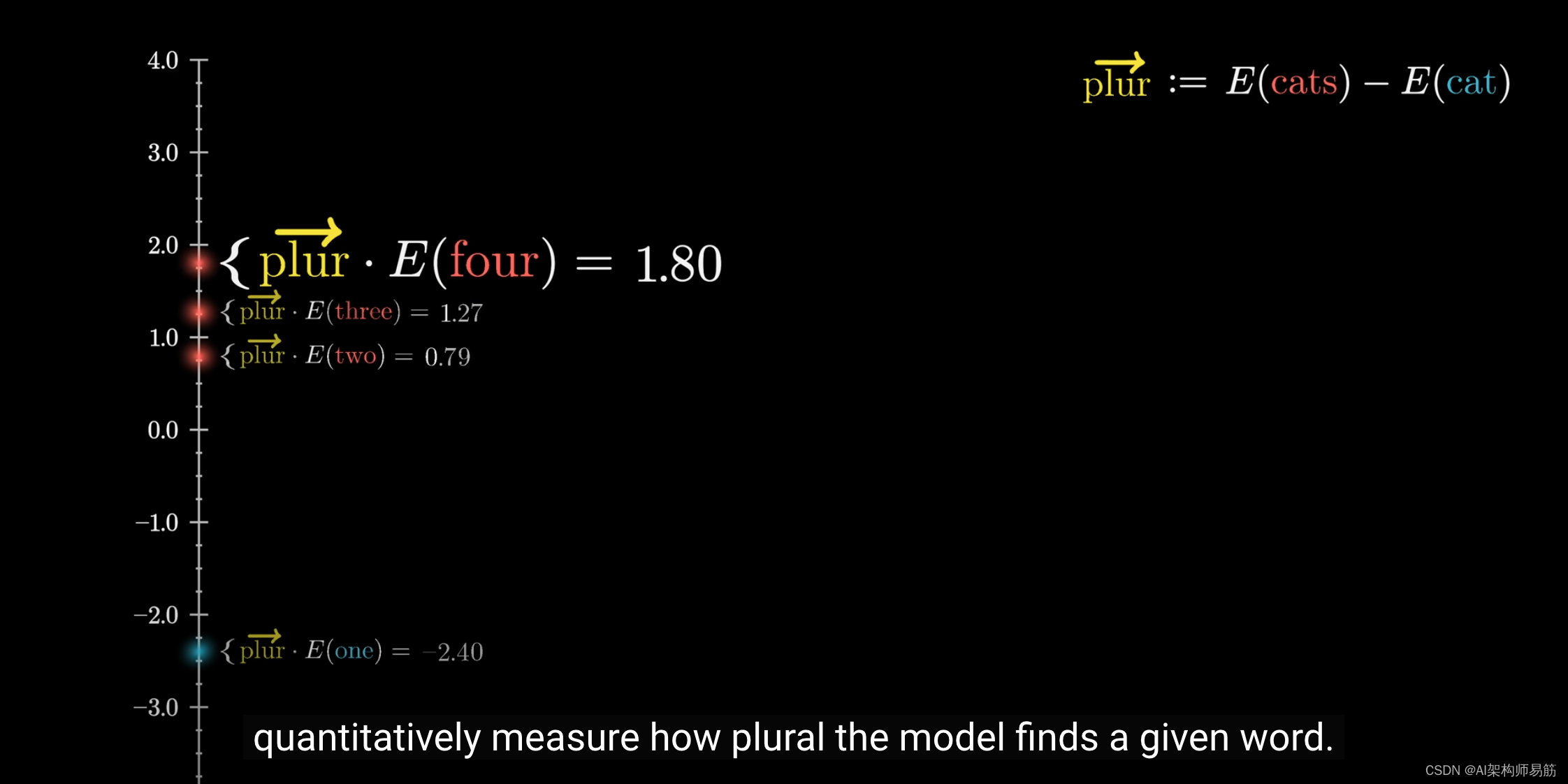
翻译: 什么是ChatGPT 通过图形化的方式来理解 Transformer 架构 深度学习三
合集 ChatGPT 通过图形化的方式来理解 Transformer 架构 翻译: 什么是ChatGPT 通过图形化的方式来理解 Transformer 架构 深度学习一翻译: 什么是ChatGPT 通过图形化的方式来理解 Transformer 架构 深度学习二翻译: 什么是ChatGPT 通过图形化的方式来理解 Transformer 架构 深…...

基于Seata实现分布式事务实现
Seata 是一个开源的分布式事务解决方案,它提供了高性能和简单易用的分布式事务服务。Seata 将事务的参与者分为 TC(Transaction Coordinator)、TM(Transaction Manager)和 RM(Resource Manager)…...
adss光缆是什么意思
adss光缆,adss光缆型号,adss光缆用途 什么是adss光缆 ADSS用于高压输电线路并利用电力系统输电塔干,整个光缆为非金属介质,自承悬挂于电力铁塔上的电力强度最小的位置。它运用于已建高压输电线路,具有安全性高&#…...
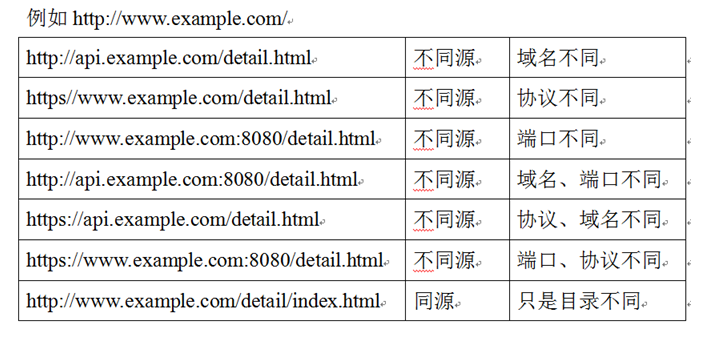
JavaScript异步编程——04-同源和跨域
同源和跨域 同源 同源策略是浏览器的一种安全策略,所谓同源是指,域名,协议,端口完全相同。 跨域问题的解决方案 从我自己的网站访问别人网站的内容,就叫跨域。 出于安全性考虑,浏览器不允许ajax跨域获取…...
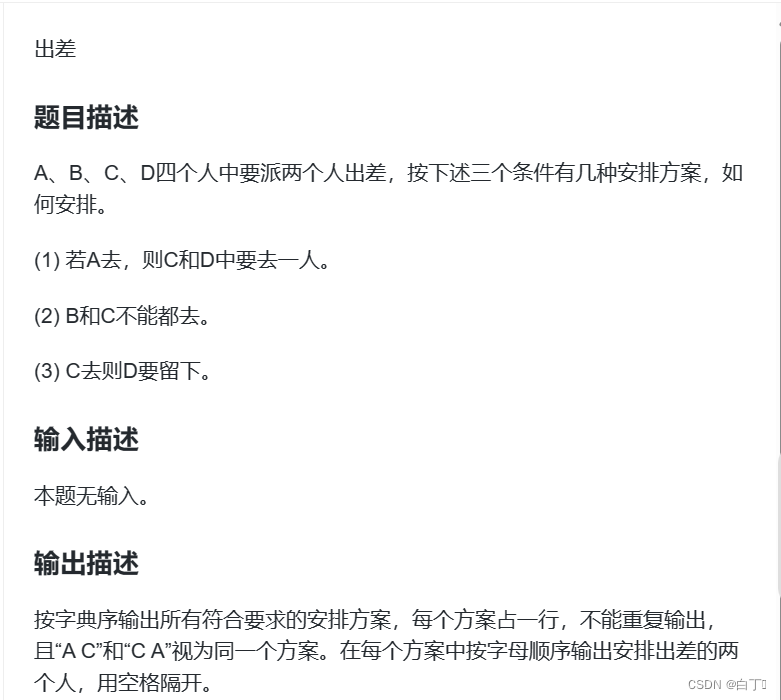
出差——蓝桥杯十三届2022国赛大学B组真题
问题分析 该题属于枚举类型,遍历所有情况选出符合条件的即可。因为只需要派两个人,因此采用两层循环遍历每一种情况。 AC_Code #include <bits/stdc.h> using namespace std; string str;//选择的两人 bool ok(){if(str.find("A")!-1…...
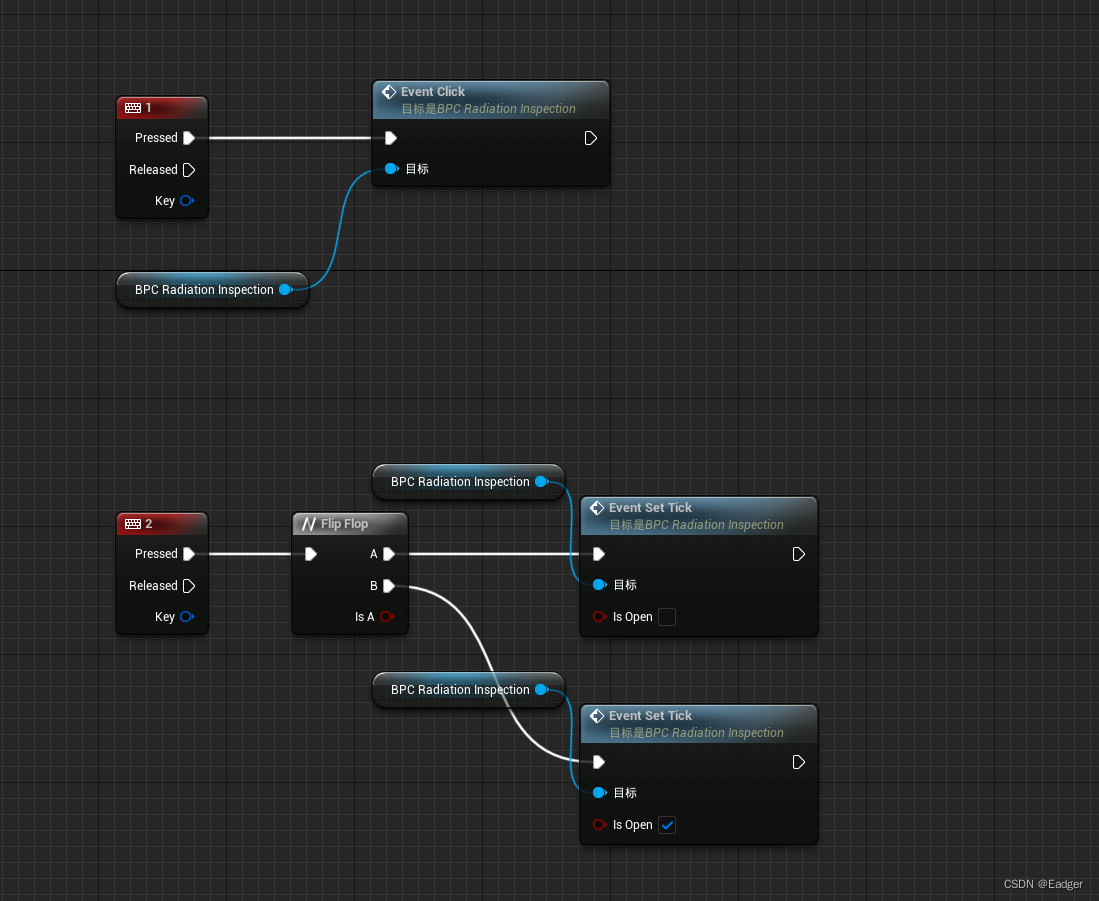
UE5(射线检测)学习笔记
这一篇会讲解射线检测点击事件、离开悬停、进入悬停事件的检测,以及关闭射线检测的事件,和射线检测蓝图的基础讲解。 创建一个简单的第三人称模板 创建一个射线检测的文件夹RadiationInspection,并且右键蓝图-场景组件-命名为BPC_Radiation…...
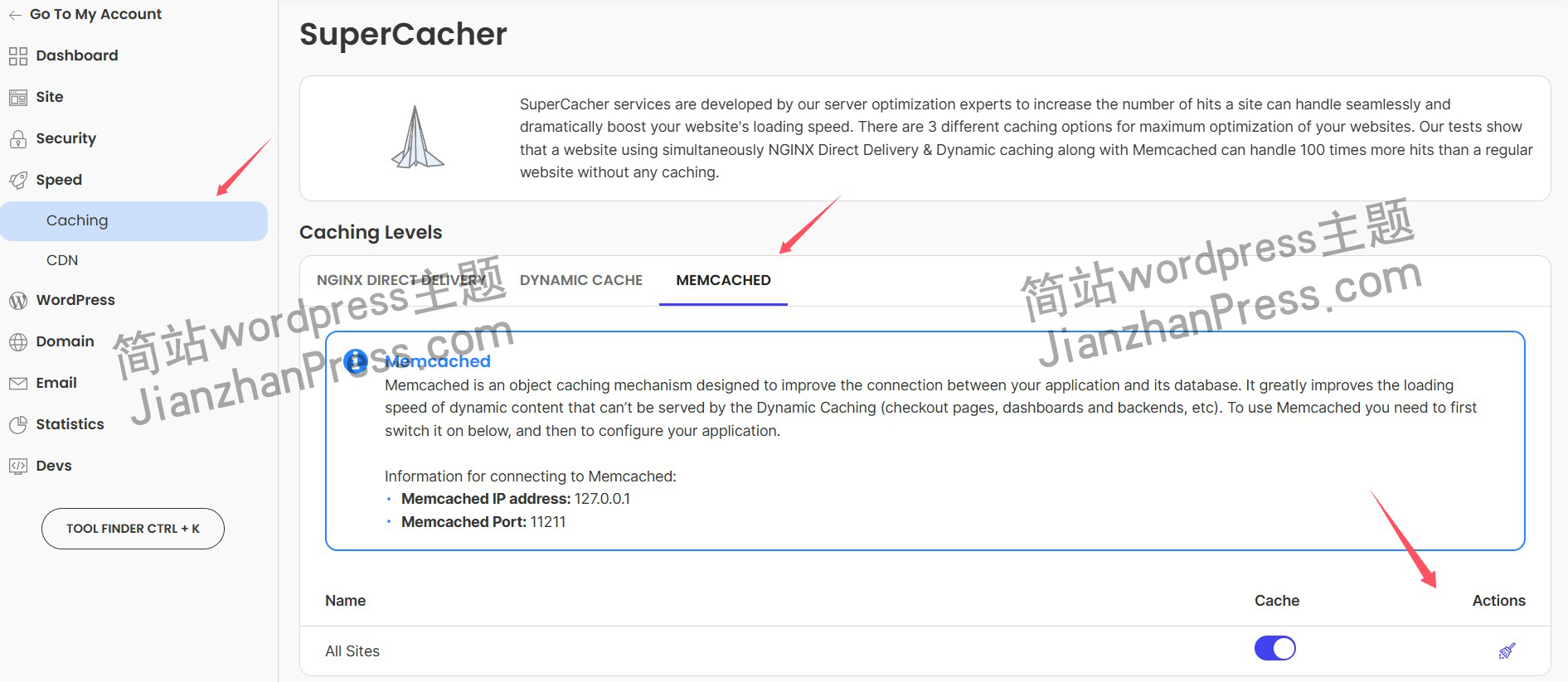
wordpress后台更新后 前端没变化的解决方法
使用siteground主机的wordpress网站,会出现更新了网站内容和修改了php模板文件、js文件、css文件、图片文件后,网站没有变化的情况。 不熟悉siteground主机的新手,遇到这个问题,就很抓狂,明明是哪都没操作错误&#x…...

web vue 项目 Docker化部署
Web 项目 Docker 化部署详细教程 目录 Web 项目 Docker 化部署概述Dockerfile 详解 构建阶段生产阶段 构建和运行 Docker 镜像 1. Web 项目 Docker 化部署概述 Docker 化部署的主要步骤分为以下几个阶段: 构建阶段(Build Stage):…...

线程与协程
1. 线程与协程 1.1. “函数调用级别”的切换、上下文切换 1. 函数调用级别的切换 “函数调用级别的切换”是指:像函数调用/返回一样轻量地完成任务切换。 举例说明: 当你在程序中写一个函数调用: funcA() 然后 funcA 执行完后返回&…...
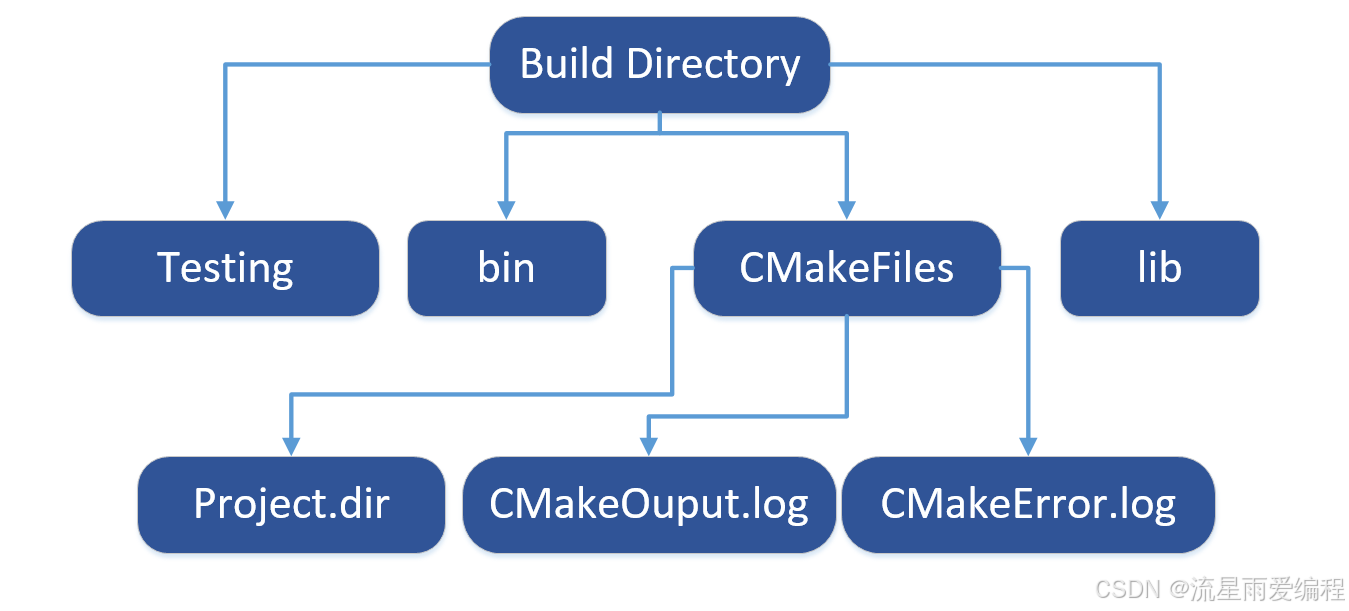
CMake基础:构建流程详解
目录 1.CMake构建过程的基本流程 2.CMake构建的具体步骤 2.1.创建构建目录 2.2.使用 CMake 生成构建文件 2.3.编译和构建 2.4.清理构建文件 2.5.重新配置和构建 3.跨平台构建示例 4.工具链与交叉编译 5.CMake构建后的项目结构解析 5.1.CMake构建后的目录结构 5.2.构…...
ESP32 I2S音频总线学习笔记(四): INMP441采集音频并实时播放
简介 前面两期文章我们介绍了I2S的读取和写入,一个是通过INMP441麦克风模块采集音频,一个是通过PCM5102A模块播放音频,那如果我们将两者结合起来,将麦克风采集到的音频通过PCM5102A播放,是不是就可以做一个扩音器了呢…...

鱼香ros docker配置镜像报错:https://registry-1.docker.io/v2/
使用鱼香ros一件安装docker时的https://registry-1.docker.io/v2/问题 一键安装指令 wget http://fishros.com/install -O fishros && . fishros出现问题:docker pull 失败 网络不同,需要使用镜像源 按照如下步骤操作 sudo vi /etc/docker/dae…...
多模态大语言模型arxiv论文略读(108)
CROME: Cross-Modal Adapters for Efficient Multimodal LLM ➡️ 论文标题:CROME: Cross-Modal Adapters for Efficient Multimodal LLM ➡️ 论文作者:Sayna Ebrahimi, Sercan O. Arik, Tejas Nama, Tomas Pfister ➡️ 研究机构: Google Cloud AI Re…...

Xen Server服务器释放磁盘空间
disk.sh #!/bin/bashcd /run/sr-mount/e54f0646-ae11-0457-b64f-eba4673b824c # 全部虚拟机物理磁盘文件存储 a$(ls -l | awk {print $NF} | cut -d. -f1) # 使用中的虚拟机物理磁盘文件 b$(xe vm-disk-list --multiple | grep uuid | awk {print $NF})printf "%s\n"…...

A2A JS SDK 完整教程:快速入门指南
目录 什么是 A2A JS SDK?A2A JS 安装与设置A2A JS 核心概念创建你的第一个 A2A JS 代理A2A JS 服务端开发A2A JS 客户端使用A2A JS 高级特性A2A JS 最佳实践A2A JS 故障排除 什么是 A2A JS SDK? A2A JS SDK 是一个专为 JavaScript/TypeScript 开发者设计的强大库ÿ…...
的使用)
Go 并发编程基础:通道(Channel)的使用
在 Go 中,Channel 是 Goroutine 之间通信的核心机制。它提供了一个线程安全的通信方式,用于在多个 Goroutine 之间传递数据,从而实现高效的并发编程。 本章将介绍 Channel 的基本概念、用法、缓冲、关闭机制以及 select 的使用。 一、Channel…...