ROS2学习——Docker环境下安装于使用(1)
目录
一、简要
二、ROS2和ROS1区别
三、环境搭建与安装
(2)拉取ubuntu22.04镜像
(2)安装ROS2
1. 基本设置
2.设置源
3.安装ROS2功能包
4.测试
四、相关指令学习
1.小海龟测试
2.ros2 node等指令
3.rqt
一、简要
随着ROS2的逐渐普和应用,笔者也开始逐渐从ROS1转向ROS2的学习当中。本文主要介绍如何在docker环境中安装使用ROS2,并且也会介绍ROS2的有些优势和基本概念。
二、ROS2和ROS1区别
ROS 1主要构建于Linux系统之上,主要支持Ubuntu。而ROS 2采用全新的架构,底层基于DDS(Data Distribution Service)通信机制,支持实时性、嵌入式、分布式、多操作系统。ROS 2支持的系统包括Linux、windows、Mac、RTOS,甚至是单片机等没有操作系统的裸机。
详细的对比见:ROS与ROS2比较_ros可以嵌入实时程序案例-CSDN博客
三、环境搭建与安装
docker的安装与使用可参考:
Ubuntu下使用docker_xhost +local:docker-CSDN博客
(2)拉取ubuntu22.04镜像
docker pull ubuntu:22.04创建容器,这里将端口号,GPU和图显示都和宿主机相连。
xhost +local:root;
docker run -it --privileged=true --net=host \--gpus all \-p 11311:11311 \--env="DISPLAY" \--env="QT_X11_NO_MITSHM=1" \--volume="/tmp/.X11-unix:/tmp/.X11-unix:rw" \--volume="/dev:/dev" \-v /home/root/contain:/root/dataset \--name useros2 ubuntu:22.04 /bin/bash(2)安装ROS2
其实可以在Dokcerhub上找别人安装好的22.04镜像,为了学习本文带大家在纯净的22.04上安装一遍。
安装步骤其实官网已有详细的步骤:
Ubuntu (Debian) — ROS 2 Documentation: Foxy documentation 这是ubuntu20.4安装
Ubuntu (Debian packages) — ROS 2 Documentation: Humble documentation ubuntu22.4安装
1. 基本设置
docker进入默认是root用户所以不需要sudo指令
locale # check for UTF-8apt update && apt install locales
locale-gen en_US en_US.UTF-8
update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8locale # verify settings2.设置源
apt install software-properties-common
add-apt-repository universeapt update && apt install curl -y
curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpgecho "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | tee /etc/apt/sources.list.d/ros2.list > /dev/null3.安装ROS2功能包
这里安装桌面版本的ROS2基本相关的功能包都安装。
apt update
apt upgrade#20.4
#apt install ros-foxy-desktop python3-argcomplete#22.04
sudo apt install ros-humble-desktop中途会按照你选择的地区设定时间,可能和时间戳相关暂时可以随机设置。
4.测试
这里可以把这个句写到~/.bashrc中。
source /opt/ros/humble/setup.bash话题发送者在终端中发送"hello word”
ros2 run demo_nodes_cpp talker如果需要安装ROS可以参考之前写的博客:
Ubuntu18版本安装ROS_ubuntu18安装ros-CSDN博客
四、相关指令学习
1.小海龟测试
检测是否安装好小海龟功能包
ros2 pkg executables turtlesim#未安装则:
#apt install ros-humble-turtlesim打开小海龟的仿真程序:
ros2 run turtlesim turtlesim_node终端输入则显示如下:

在终端中会输出节点名称,小海龟的坐标和航向角。

使用键盘控制小海龟
ros2 run turtlesim turtle_teleop_key在另一个终端输入指令则可以使用方向键控制小海龟的移动方向。
2.ros2 node等指令
可以使用类似ROS中的rostopic 和rosbag等相同的指令,只不过ROS2将这些指令重新命名,终端中输入ros2也可以查看到帮助。
在小海龟的实例下输入:
ros2 topic list显示出当前ROS中在发布的话题。
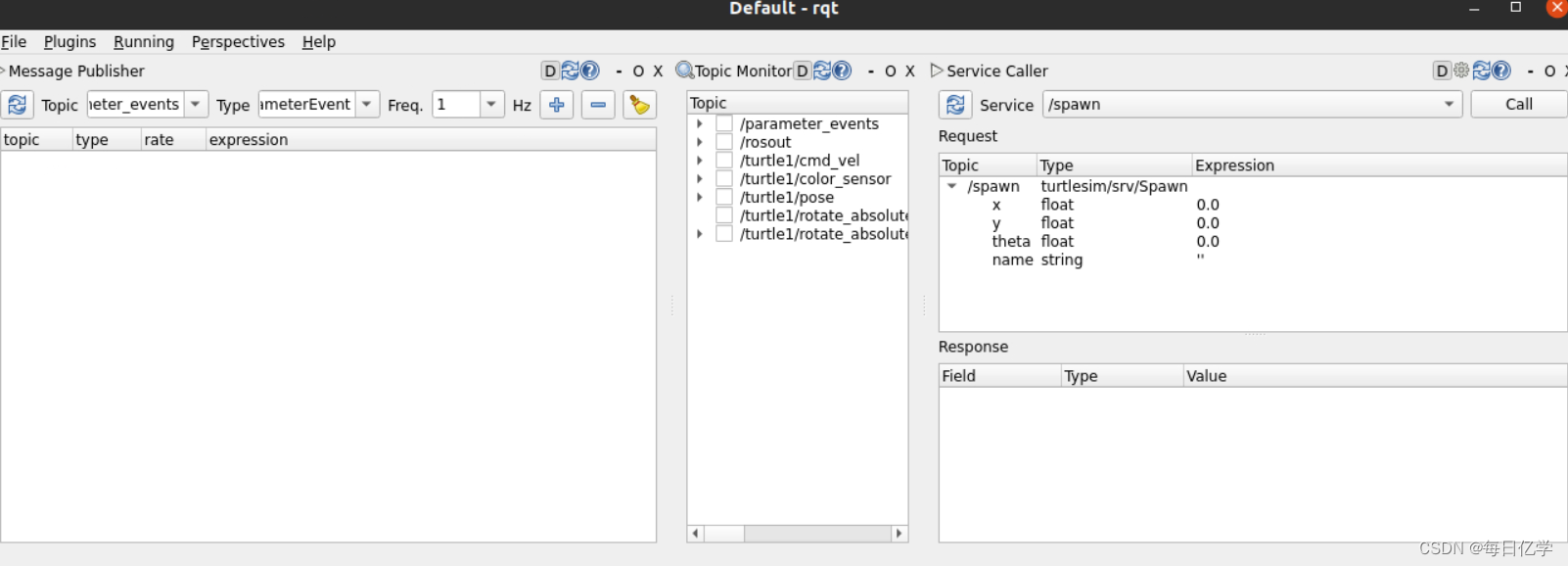
3.rqt
在终端中直接输入rqt即可使用,如果显示没有则可以直接安装。
apt install ~nros-humble-rqt*rqt中可以查看node,service,topice等信息,通过可视化的方法查看相关的信息。
相关文章:
ROS2学习——Docker环境下安装于使用(1)
目录 一、简要 二、ROS2和ROS1区别 三、环境搭建与安装 (2)拉取ubuntu22.04镜像 (2)安装ROS2 1. 基本设置 2.设置源 3.安装ROS2功能包 4.测试 四、相关指令学习 1.小海龟测试 2.ros2 node等指令 3.rqt 一、简要 随着R…...

数据仓库之Hologres
官方文档 简介 Hologres是阿里云推出的一种云原生的实时分析型数据仓库。它是基于开源项目Apache Hudi(Hadoop Upserts Deletes and Incrementals)进行扩展和优化的。Hologres提供了高性Hologres是阿里云推出的一种云原生的实时分析型数据仓库。它是基…...
MacOS搭建docker本地私有镜像库
相关环境 macOS: bigsur 11.7.8 docker desktop: 4.22.0 docker engine: 24.0.5 准备工作 本机已经安装好docker desktop,未安装的自行参考其他教程。如果不能翻墙,可以修改本地的镜像地址,可在docker desktop 设置中的docker engine中修…...
Unity Material(材质)、Texture(纹理)、Shader(着色器)简介
文章目录 一、概念二、Rendering Mode三、Main Maps三、参考文章 一、概念 Material(材质):物体的“色彩”、“纹理”、“光滑度”、“透明度”、“反射率”、“折射率”、“发光度”等,材质的本质是shader的实例(载体)Texture(贴图):附件到…...
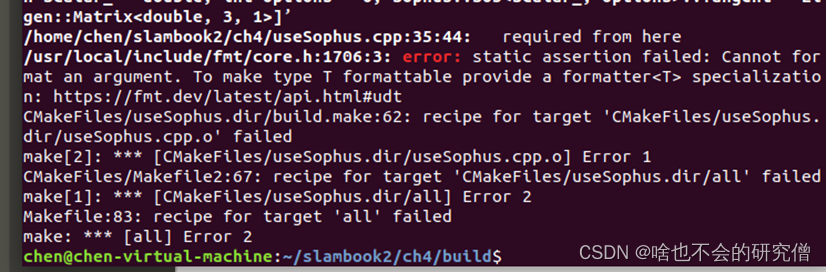
《视觉十四讲》例程运行记录(1)—— 课本源码下载和3rdparty文件夹是空的解决办法
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言一、第二版十四讲课本源码下载1. 安装git工具 二、Pangolin下载和安装1. 源码下载2. Pangolin的安装(1) 安装依赖项(2) 源码编译安装(2) 测试是否安装成功 二、…...
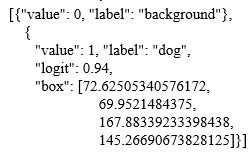
VLM与基础分割模型的联合使用
最近做的项目里有涉及大模型,里面有一部分的功能是: 将图片输入VLM(视觉语言模型,我使用的是llava),询问图中最显著的物体,将其给出的答案作为基础分割模型(我使用的是Grounded-SAM)的text prom…...

JS数组去重的方法
目录 1、includes 2、indexOf 3、Set结合Array.from 4、filter 5、reduce 6、使用双重for循环 介绍一下数组常用的去重复方法 以以下数组为例子来介绍,一维的数字类型数组: const arr [1, 2, 2, 2, 3, 1, 6, 4, 4, 6, 5, 7] 1、includes funct…...

Go实战训练之Web Server 与路由树
Server & 路由树 Server Web 核心 对于一个 Web 框架,至少要提供三个抽象: Server:代表服务器的抽象Context:表示上下文的抽象路由树 Server 从特性上来说,至少要提供三部分功能: 生命周期控制&…...

C#中接口设计相关原则
在C#中,接口(Interface)是一种引用类型,它定义了一个契约,指定了一个类必须实现的成员(属性、方法、事件、索引器)。接口不提供这些成员的实现,只指定成员必须按照特定的方式被实现。…...
Pytorch学习笔记——卷积操作
一、认识卷积操作 卷积操作是一种数学运算,它涉及两个函数:输入函数(通常是图像)和卷积核(也称为滤波器或特征检测器)。卷积核在输入函数上滑动,将核中的每个元素与其覆盖的输入函数区域中的对应…...

探索鸿蒙开发:鸿蒙系统如何引领嵌入式技术革新
嵌入式技术已经成为现代社会不可或缺的一部分。而在这个领域,华为凭借其自主研发的鸿蒙操作系统,正悄然引领着一场技术革新的浪潮。本文将探讨鸿蒙开发的特点、优势以及其对嵌入式技术发展的深远影响。 鸿蒙操作系统的特点 鸿蒙,作为华为推…...
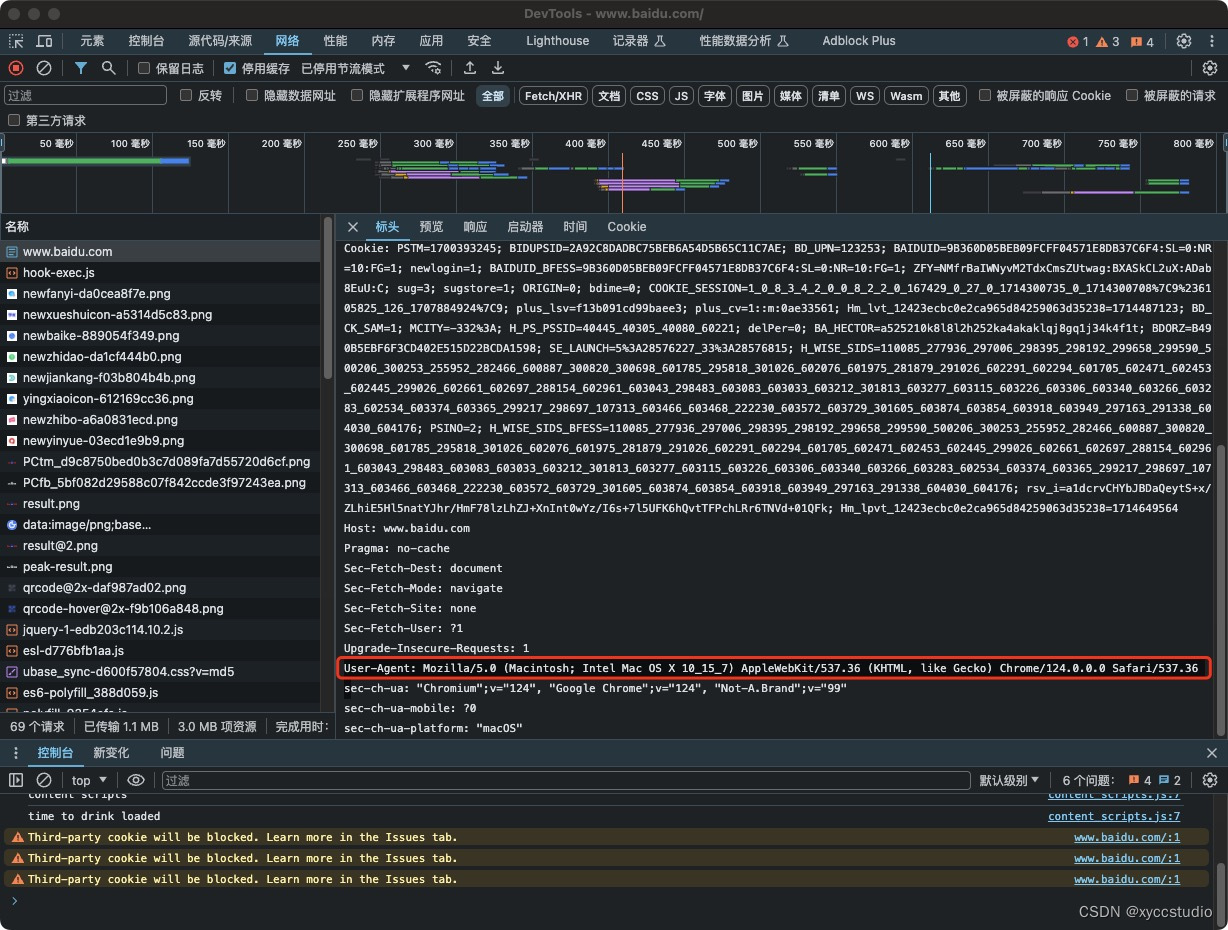
chrome extension插件替换网络请求中的useragent
感觉Chrome商店中的插件不能很好的实现自己想要的效果,那么就来自己动手吧。 本文以百度为例: 一般来说网页请求如下: 当前使用的useragent是User-Agent: Mozilla/5.0 (Macintosh; Intel Mac OS X 10_15_7) AppleWebKit/537.36 (KHTML, like Gecko) Chrome/124.0.0.0 Safar…...

PHP基础【介绍,注释,更改编码,赋值,数据类型】
源码 <?php //单行注释 /* 多行注释 *///通过header()函数发送http头的请求信息用来指定页面的字符集编码 header("Content-type:text/html;Charsetutf-8"); //告诉浏览器,当前页面的内容类型是HTML,并且页面内容使用的是UTF-8编码。//ph…...
ASP.NET小型证券术语解释及翻译系统的设计与开发
摘 要 在系统设计上,综合各种翻译类型网站优缺点,设计出具有任何使用者都可添加术语信息的且只有管理员能够实现术语修改及删除等独特方式的术语查看管理系统。此方式能够使术语量快速增大,并且便于使用者及管理员操作,满足相互…...
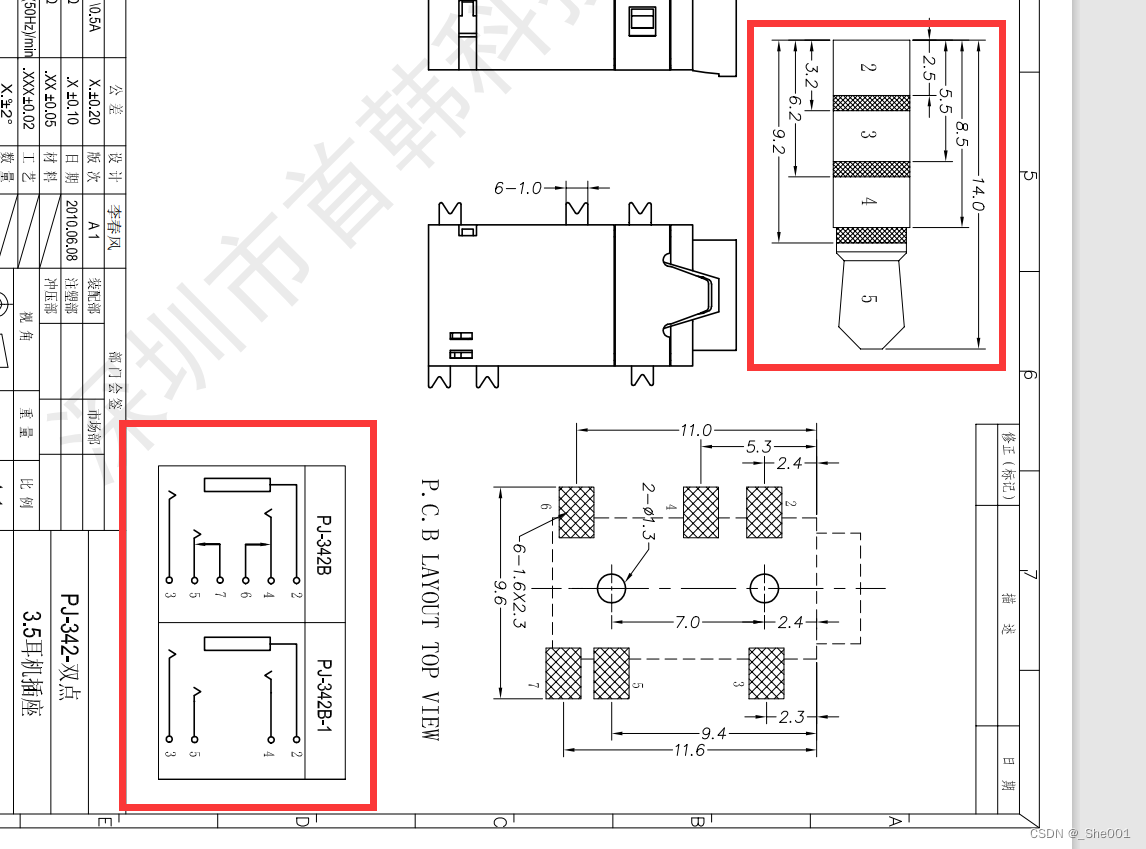
硬件知识积累 音频插座的了解,看音频插座的原理图来了解音频插座的引脚。
1. 音频接口 音频插座是一种用于连接音频信号线路的电子元件,常见于音频设备(如音响、耳机、话筒等)中。它的主要作用是将电子信号转化为声音信号,以满足人们对于音乐、电影、游戏等方面的需求。 根据插头形状的不同,音…...
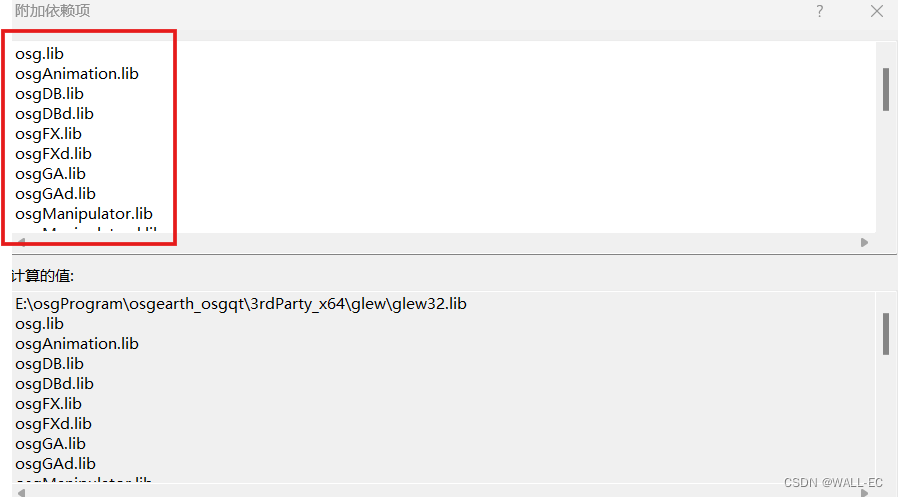
error LNK2001: 无法解析的外部符号 “__declspec(dllimport) public: __cdecl ......
运行程序时,报如上图所示错误,其中一条是: ReflectionProbe.obj : error LNK2001: 无法解析的外部符号 "__declspec(dllimport) public: __cdecl osg::Object::Object(bool)" (__imp_??0ObjectosgQEAA_NZ) 报这个错误一般是因为…...
邮箱Webhook API发送邮件的性能怎么优化?
邮箱Webhook API发送邮件的步骤?如何用邮箱API发信? 随着业务规模的扩大,如何高效地通过邮箱Webhook API发送邮件,成为了许多企业面临的关键问题。下面,AokSend将探讨一些优化邮箱Webhook API发送邮件性能的方法。 邮…...
并发编程实现
一、并行编程 1、Parallel 类 Parallel类是System.Threading.Tasks命名空间中的一个重要类,它提供数据并行和任务并行的高级抽象。 For和ForEach Parallel类下的For和ForEach对应着普通的循环和遍历(普通的for和foreach),但执行时会尝试在多个线程上…...
基于EBAZ4205矿板的图像处理:12图像二值化(阈值可调)
基于EBAZ4205矿板的图像处理:12图像二值化(阈值可调) 我的项目是基于EBAZ4205矿板的阈值可调的图像阈值二值化处理,可以通过按键调整二值化的阈值,key1为阈值加1,key4为阈值减1,key2为阈值加10,key5为阈值…...

人大金仓数据库报com.kingbase8.util.KSQLException: 致命错误: 用户 “SYSTEM“ Password 认证失败
com.kingbase8.util.KSQLException: 致命错误: 用户 “SYSTEM” Password 认证失败 解决办法: 问题在于用户权限只不足,相关配置文件在一般在 /data/sys hba.conf,修改IPV4 local connections选项中的改为trust。...

使用VSCode开发Django指南
使用VSCode开发Django指南 一、概述 Django 是一个高级 Python 框架,专为快速、安全和可扩展的 Web 开发而设计。Django 包含对 URL 路由、页面模板和数据处理的丰富支持。 本文将创建一个简单的 Django 应用,其中包含三个使用通用基本模板的页面。在此…...

SkyWalking 10.2.0 SWCK 配置过程
SkyWalking 10.2.0 & SWCK 配置过程 skywalking oap-server & ui 使用Docker安装在K8S集群以外,K8S集群中的微服务使用initContainer按命名空间将skywalking-java-agent注入到业务容器中。 SWCK有整套的解决方案,全安装在K8S群集中。 具体可参…...
Spark 之 入门讲解详细版(1)
1、简介 1.1 Spark简介 Spark是加州大学伯克利分校AMP实验室(Algorithms, Machines, and People Lab)开发通用内存并行计算框架。Spark在2013年6月进入Apache成为孵化项目,8个月后成为Apache顶级项目,速度之快足见过人之处&…...
:にする)
日语学习-日语知识点小记-构建基础-JLPT-N4阶段(33):にする
日语学习-日语知识点小记-构建基础-JLPT-N4阶段(33):にする 1、前言(1)情况说明(2)工程师的信仰2、知识点(1) にする1,接续:名词+にする2,接续:疑问词+にする3,(A)は(B)にする。(2)復習:(1)复习句子(2)ために & ように(3)そう(4)にする3、…...

Linux简单的操作
ls ls 查看当前目录 ll 查看详细内容 ls -a 查看所有的内容 ls --help 查看方法文档 pwd pwd 查看当前路径 cd cd 转路径 cd .. 转上一级路径 cd 名 转换路径 …...
HTML 列表、表格、表单
1 列表标签 作用:布局内容排列整齐的区域 列表分类:无序列表、有序列表、定义列表。 例如: 1.1 无序列表 标签:ul 嵌套 li,ul是无序列表,li是列表条目。 注意事项: ul 标签里面只能包裹 li…...
《通信之道——从微积分到 5G》读书总结
第1章 绪 论 1.1 这是一本什么样的书 通信技术,说到底就是数学。 那些最基础、最本质的部分。 1.2 什么是通信 通信 发送方 接收方 承载信息的信号 解调出其中承载的信息 信息在发送方那里被加工成信号(调制) 把信息从信号中抽取出来&am…...
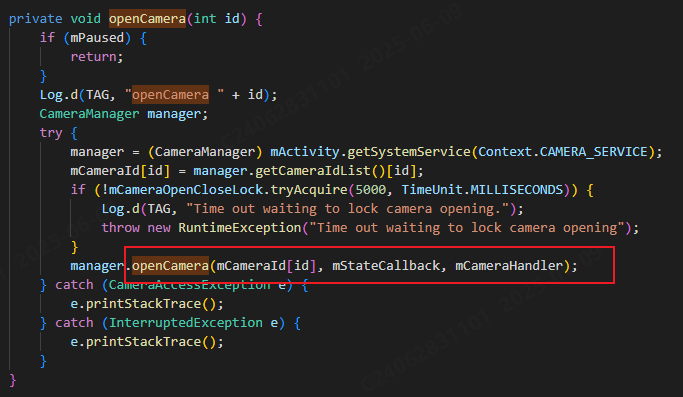
相机从app启动流程
一、流程框架图 二、具体流程分析 1、得到cameralist和对应的静态信息 目录如下: 重点代码分析: 启动相机前,先要通过getCameraIdList获取camera的个数以及id,然后可以通过getCameraCharacteristics获取对应id camera的capabilities(静态信息)进行一些openCamera前的…...

Python ROS2【机器人中间件框架】 简介
销量过万TEEIS德国护膝夏天用薄款 优惠券冠生园 百花蜂蜜428g 挤压瓶纯蜂蜜巨奇严选 鞋子除臭剂360ml 多芬身体磨砂膏280g健70%-75%酒精消毒棉片湿巾1418cm 80片/袋3袋大包清洁食品用消毒 优惠券AIMORNY52朵红玫瑰永生香皂花同城配送非鲜花七夕情人节生日礼物送女友 热卖妙洁棉…...
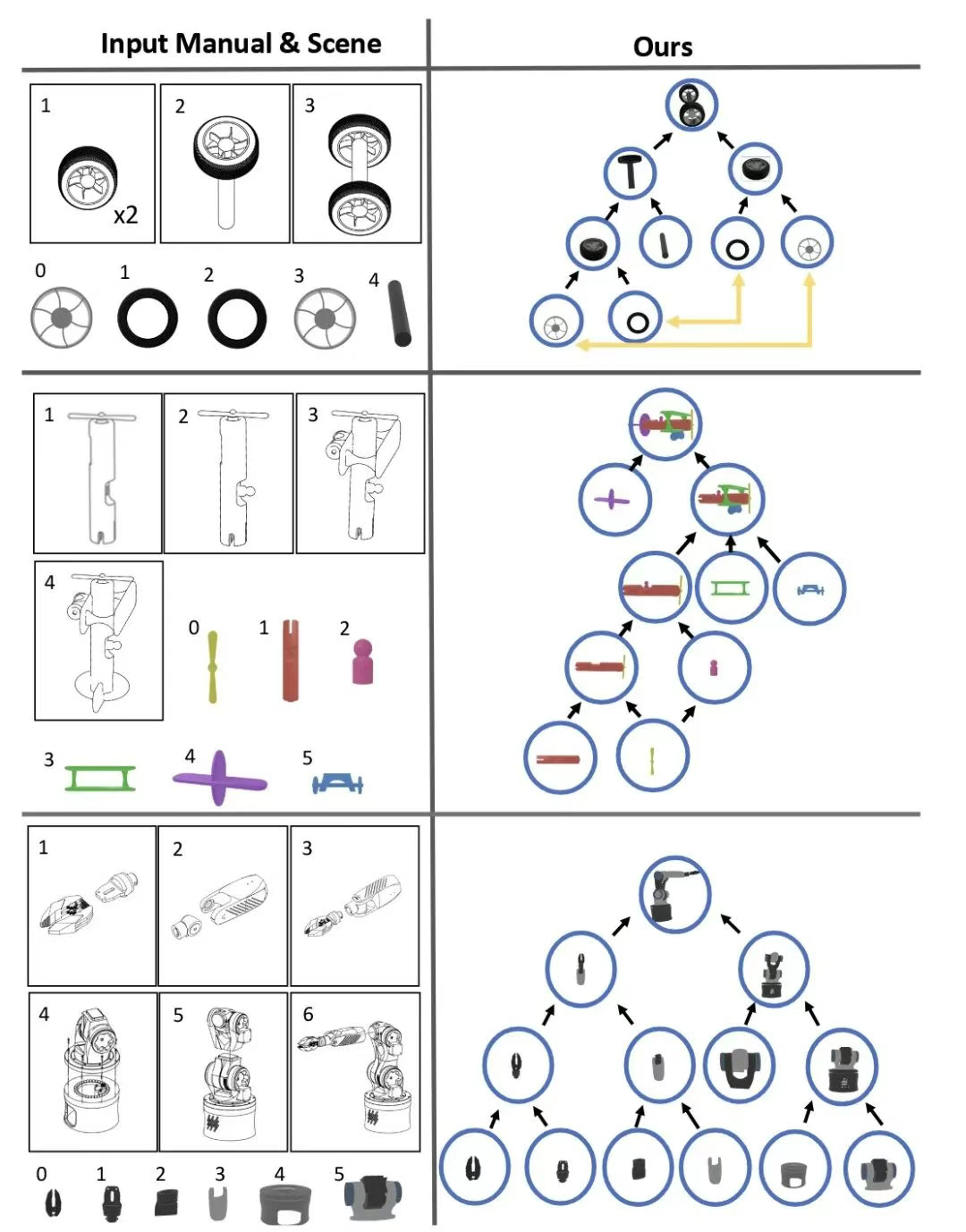
RSS 2025|从说明书学习复杂机器人操作任务:NUS邵林团队提出全新机器人装配技能学习框架Manual2Skill
视觉语言模型(Vision-Language Models, VLMs),为真实环境中的机器人操作任务提供了极具潜力的解决方案。 尽管 VLMs 取得了显著进展,机器人仍难以胜任复杂的长时程任务(如家具装配),主要受限于人…...