【6D位姿估计】FoundationPose 跑通demo 训练记录
前言
本文记录在FoundationPose中,跑通基于CAD模型为输入的demo,输出位姿信息,可视化结果。
然后分享NeRF物体重建部分的训练,以及RGBD图为输入的demo。
1、搭建环境
方案1:基于docker镜像(推荐)
首先下载开源代码:https://github.com/NVlabs/FoundationPose
然后执行下面命令,拉取镜像,并构建镜像环境
cd docker/
docker pull wenbowen123/foundationpose && docker tag wenbowen123/foundationpose foundationpose
bash docker/run_container.sh
bash build_all.sh构建完成后,可以用docker exec 进入镜像容器中。
方案2:基于Conda(比较麻烦)
首先安装 Eigen3
cd $HOME && wget -q https://gitlab.com/libeigen/eigen/-/archive/3.4.0/eigen-3.4.0.tar.gz && \
tar -xzf eigen-3.4.0.tar.gz && \
cd eigen-3.4.0 && mkdir build && cd build
cmake .. -Wno-dev -DCMAKE_BUILD_TYPE=Release -DCMAKE_CXX_FLAGS=-std=c++14 ..
sudo make install
cd $HOME && rm -rf eigen-3.4.0 eigen-3.4.0.tar.gz然后参考下面命令,创建conda环境
# create conda environment
create -n foundationpose python=3.9# activate conda environment
conda activate foundationpose# install dependencies
python -m pip install -r requirements.txt# Install NVDiffRast
python -m pip install --quiet --no-cache-dir git+https://github.com/NVlabs/nvdiffrast.git# Kaolin (Optional, needed if running model-free setup)
python -m pip install --quiet --no-cache-dir kaolin==0.15.0 -f https://nvidia-kaolin.s3.us-east-2.amazonaws.com/torch-2.0.0_cu118.html# PyTorch3D
python -m pip install --quiet --no-index --no-cache-dir pytorch3d -f https://dl.fbaipublicfiles.com/pytorch3d/packaging/wheels/py39_cu118_pyt200/download.html# Build extensions
CMAKE_PREFIX_PATH=$CONDA_PREFIX/lib/python3.9/site-packages/pybind11/share/cmake/pybind11 bash build_all_conda.sh2、基于CAD模型为输入的demo
首先,下载模型权重,里面包括两个文件夹;点击下载(模型权重)
在工程目录中创建weights/,将下面两个文件夹放到里面。
然后,下载测试数据,里面包括两个压缩文件;点击下载(demo数据)
在工程目录中创建demo_data/,加压文件,将下面两个文件放到里面。
运行 run_demo.py,实现CAD模型为输入的demo
python run_demo.py --debug 2如果是服务器运行,没有可视化的,需要注释两行代码:
if debug>=1:
center_pose = pose@np.linalg.inv(to_origin)
vis = draw_posed_3d_box(reader.K, img=color, ob_in_cam=center_pose, bbox=bbox)
vis = draw_xyz_axis(color, ob_in_cam=center_pose, scale=0.1, K=reader.K, thickness=3, transparency=0, is_input_rgb=True)
# cv2.imshow('1', vis[...,::-1])
# cv2.waitKey(1)
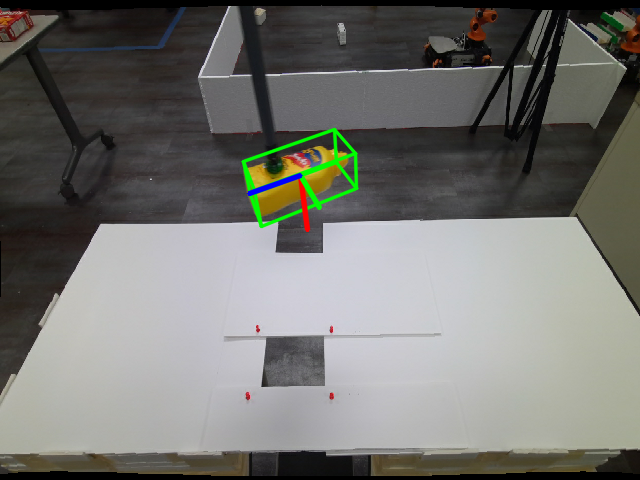
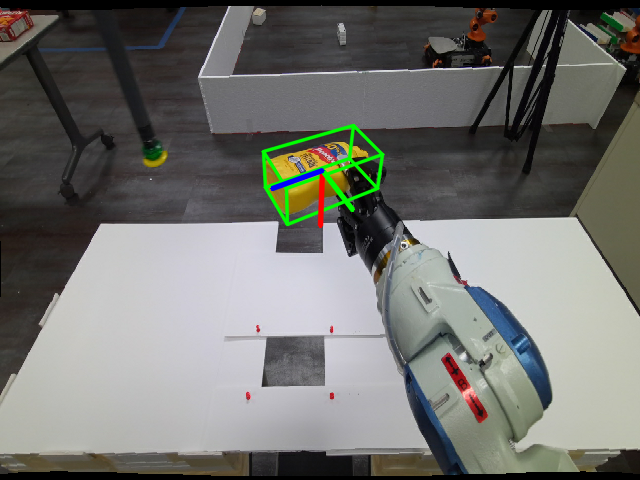
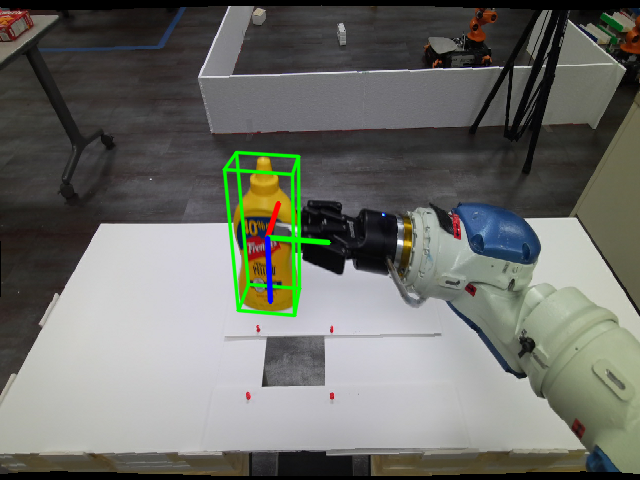
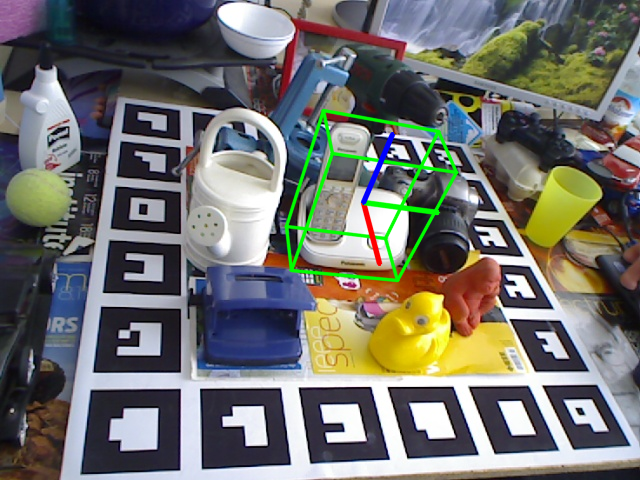
然后看到demo_data/mustard0/,里面生成了ob_in_cam、track_vis文件夹
ob_in_cam 是位姿估计的结果,用txt文件存储,示例文件:
6.073544621467590332e-01 -2.560715079307556152e-01 7.520291209220886230e-01 -4.481770694255828857e-01
-7.755840420722961426e-01 -3.960975110530853271e-01 4.915038347244262695e-01 1.187708452343940735e-01
1.720167100429534912e-01 -8.817789554595947266e-01 -4.391765296459197998e-01 8.016449213027954102e-01
0.000000000000000000e+00 0.000000000000000000e+00 0.000000000000000000e+00 1.000000000000000000e+00
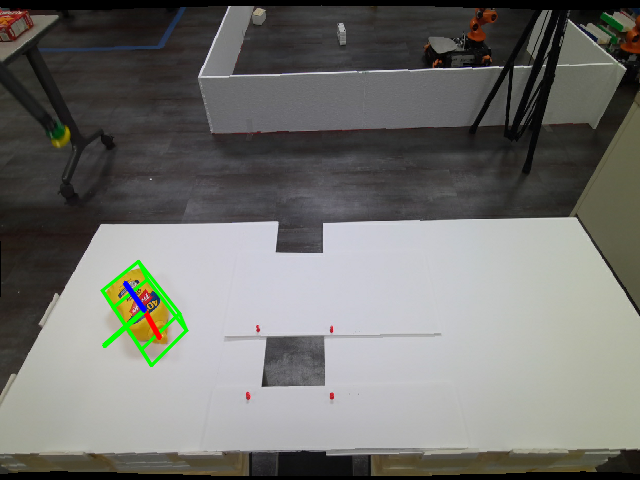
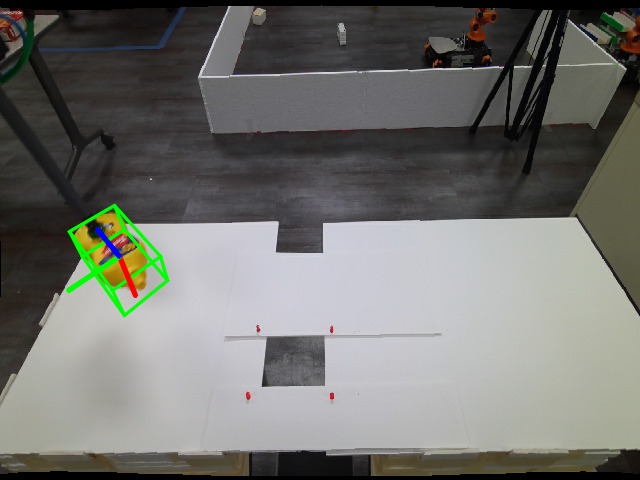
track_vis 是可视化结果,能看到多张图片:
3、NeRF物体重建训练
下载训练数据,Linemod和YCB-V两个公开数据集的示例:
点击下载(RGBD参考数据)
示例1:训练Linemod数据集
修改代码bundlesdf/run_nerf.py,修改为use_refined_mask=False,即98行:
mesh = run_one_ob(base_dir=base_dir, cfg=cfg, use_refined_mask=False)
然后执行命令:
python bundlesdf/run_nerf.py --ref_view_dir /DATASET/lm_ref_views --dataset linemod如果是服务器运行,没有可视化的,需要安装xvfb
sudo apt-get update
sudo apt-get install -y xvfb然后执行命令:
xvfb-run -s "-screen 0 1024x768x24" python bundlesdf/run_nerf.py --ref_view_dir model_free_ref_views/lm_ref_views --dataset linemod因为训练NeRF需要渲染的,使用xvfb进行模拟。
能看到打印信息:
bundlesdf/run_nerf.py:61: DeprecationWarning: Starting with ImageIO v3 the behavior of this function will switch to that of iio.v3.imread. To keep the current behavior (and make this warning disappear) use `import imageio.v2 as imageio` or call `imageio.v2.imread` directly.rgb = imageio.imread(color_file)
[compute_scene_bounds()] compute_scene_bounds_worker start
[compute_scene_bounds()] compute_scene_bounds_worker done
[compute_scene_bounds()] merge pcd
[compute_scene_bounds()] compute_translation_scales done
translation_cvcam=[0.00024226 0.00356217 0.00056694], sc_factor=19.274929219577043
[build_octree()] Octree voxel dilate_radius:1
[__init__()] level:0, vox_pts:torch.Size([1, 3]), corner_pts:torch.Size([8, 3])
[__init__()] level:1, vox_pts:torch.Size([8, 3]), corner_pts:torch.Size([27, 3])
[__init__()] level:2, vox_pts:torch.Size([64, 3]), corner_pts:torch.Size([125, 3])
[draw()] level:2
[draw()] level:2
level 0, resolution: 32
level 1, resolution: 37
level 2, resolution: 43
level 3, resolution: 49
level 4, resolution: 56
level 5, resolution: 64
level 6, resolution: 74
level 7, resolution: 85
level 8, resolution: 98
level 9, resolution: 112
level 10, resolution: 128
level 11, resolution: 148
level 12, resolution: 169
level 13, resolution: 195
level 14, resolution: 223
level 15, resolution: 256
GridEncoder: input_dim=3 n_levels=16 level_dim=2 resolution=32 -> 256 per_level_scale=1.1487 params=(26463840, 2) gridtype=hash align_corners=False
sc_factor 19.274929219577043
translation [0.00024226 0.00356217 0.00056694]
[__init__()] denoise cloud
[__init__()] Denoising rays based on octree cloud
[__init__()] bad_mask#=3
rays torch.Size([128387, 12])
[train()] train progress 0/1001
[train_loop()] Iter: 0, valid_samples: 524161/524288, valid_rays: 2048/2048, loss: 309.0942383, rgb_loss: 0.0216732, rgb0_loss: 0.0000000, fs_rgb_loss: 0.0000000, depth_loss: 0.0000000, depth_loss0: 0.0000000, fs_loss: 301.6735840, point_cloud_loss: 0.0000000, point_cloud_normal_loss: 0.0000000, sdf_loss: 7.2143111, eikonal_loss: 0.0000000, variation_loss: 0.0000000, truncation(meter): 0.0100000, pose_reg: 0.0000000, reg_features: 0.1152707,[train()] train progress 100/1001
[train()] train progress 200/1001
[train()] train progress 300/1001
[train()] train progress 400/1001
[train()] train progress 500/1001
Saved checkpoints at model_free_ref_views/lm_ref_views/ob_0000001/nerf/model_latest.pth
[train_loop()] Iter: 500, valid_samples: 518554/524288, valid_rays: 2026/2048, loss: 1.0530750, rgb_loss: 0.0009063, rgb0_loss: 0.0000000, fs_rgb_loss: 0.0000000, depth_loss: 0.0000000, depth_loss0: 0.0000000, fs_loss: 0.2142579, point_cloud_loss: 0.0000000, point_cloud_normal_loss: 0.0000000, sdf_loss: 0.8360301, eikonal_loss: 0.0000000, variation_loss: 0.0000000, truncation(meter): 0.0100000, pose_reg: 0.0000000, reg_features: 0.0008409,[extract_mesh()] query_pts:torch.Size([42875, 3]), valid:42875
[extract_mesh()] Running Marching Cubes
[extract_mesh()] done V:(4536, 3), F:(8986, 3)
[train()] train progress 600/1001
[train()] train progress 700/1001
[train()] train progress 800/1001
[train()] train progress 900/1001
[train()] train progress 1000/1001
Saved checkpoints at model_free_ref_views/lm_ref_views/ob_0000001/nerf/model_latest.pth
[train_loop()] Iter: 1000, valid_samples: 519351/524288, valid_rays: 2029/2048, loss: 0.4827633, rgb_loss: 0.0006563, rgb0_loss: 0.0000000, fs_rgb_loss: 0.0000000, depth_loss: 0.0000000, depth_loss0: 0.0000000, fs_loss: 0.0935674, point_cloud_loss: 0.0000000, point_cloud_normal_loss: 0.0000000, sdf_loss: 0.3876466, eikonal_loss: 0.0000000, variation_loss: 0.0000000, truncation(meter): 0.0100000, pose_reg: 0.0000000, reg_features: 0.0001022,[extract_mesh()] query_pts:torch.Size([42875, 3]), valid:42875
[extract_mesh()] Running Marching Cubes
[extract_mesh()] done V:(5265, 3), F:(10328, 3)
[extract_mesh()] query_pts:torch.Size([42875, 3]), valid:42875
[extract_mesh()] Running Marching Cubes
[extract_mesh()] done V:(5265, 3), F:(10328, 3)
[<module>()] OpenGL_accelerate module loaded
[<module>()] Using accelerated ArrayDatatype
[mesh_texture_from_train_images()] Texture: Texture map computation
project train_images 0/16
project train_images 1/16
project train_images 2/16
project train_images 3/16
project train_images 4/16
project train_images 5/16
project train_images 6/16
project train_images 7/16
project train_images 8/16
project train_images 9/16
project train_images 10/16
project train_images 11/16
project train_images 12/16
project train_images 13/16
project train_images 14/16
project train_images 15/16
重点留意,损失的变化:
[train()] train progress 0/1001
[train_loop()] Iter: 0, valid_samples: 524161/524288, valid_rays: 2048/2048, loss: 309.0942383, rgb_loss: 0.0216732, rgb0_loss: 0.0000000, fs_rgb_loss: 0.0000000, depth_loss: 0.0000000, depth_loss0: 0.0000000, fs_loss: 301.6735840, point_cloud_loss: 0.0000000, point_cloud_normal_loss: 0.0000000, sdf_loss: 7.2143111, eikonal_loss: 0.0000000, variation_loss: 0.0000000, truncation(meter): 0.0100000, pose_reg: 0.0000000, reg_features: 0.1152707,[train()] train progress 100/1001
[train()] train progress 200/1001
[train()] train progress 300/1001
[train()] train progress 400/1001
[train()] train progress 500/1001
Saved checkpoints at model_free_ref_views/lm_ref_views/ob_0000001/nerf/model_latest.pth
[train_loop()] Iter: 500, valid_samples: 518554/524288, valid_rays: 2026/2048, loss: 1.0530750, rgb_loss: 0.0009063, rgb0_loss: 0.0000000, fs_rgb_loss: 0.0000000, depth_loss: 0.0000000, depth_loss0: 0.0000000, fs_loss: 0.2142579, point_cloud_loss: 0.0000000, point_cloud_normal_loss: 0.0000000, sdf_loss: 0.8360301, eikonal_loss: 0.0000000, variation_loss: 0.0000000, truncation(meter): 0.0100000, pose_reg: 0.0000000, reg_features: 0.0008409,
默认训练1000轮,训练也挺快的。
在lm_ref_views/ob_0000001/中生成了nerf文件夹,存放下面文件:

在lm_ref_views/ob_0000001/model中,生成了的model.obj,后续模型推理或demo直接使用它。
示例2:训练YCB-V数据集
python bundlesdf/run_nerf.py --ref_view_dir /DATASET/ycbv/ref_views_16 --dataset ycbv如果是服务器运行,没有可视化的,需要安装xvfb
sudo apt-get update
sudo apt-get install -y xvfb然后执行命令:
xvfb-run -s "-screen 0 1024x768x24" python bundlesdf/run_nerf.py --ref_view_dir /DATASET/ycbv/ref_views_16 --dataset ycbv因为训练NeRF需要渲染的,使用xvfb进行模拟。
4、RGBD图输入demo
这里以Linemod数据集为示例,首先下面测试数据集
点击下载(测试数据)

然后加压文件,存放路径:FoundationPose-main/model_free_ref_views/lm_test_all
官方代码有问题,需要替换两个代码:datareader.py、run_linemod.py
run_linemod.py
# Copyright (c) 2023, NVIDIA CORPORATION. All rights reserved.
#
# NVIDIA CORPORATION and its licensors retain all intellectual property
# and proprietary rights in and to this software, related documentation
# and any modifications thereto. Any use, reproduction, disclosure or
# distribution of this software and related documentation without an express
# license agreement from NVIDIA CORPORATION is strictly prohibited.from Utils import *
import json,uuid,joblib,os,sys
import scipy.spatial as spatial
from multiprocessing import Pool
import multiprocessing
from functools import partial
from itertools import repeat
import itertools
from datareader import *
from estimater import *
code_dir = os.path.dirname(os.path.realpath(__file__))
sys.path.append(f'{code_dir}/mycpp/build')
import yaml
import redef get_mask(reader, i_frame, ob_id, detect_type):if detect_type=='box':mask = reader.get_mask(i_frame, ob_id)H,W = mask.shape[:2]vs,us = np.where(mask>0)umin = us.min()umax = us.max()vmin = vs.min()vmax = vs.max()valid = np.zeros((H,W), dtype=bool)valid[vmin:vmax,umin:umax] = 1elif detect_type=='mask':mask = reader.get_mask(i_frame, ob_id)if mask is None:return Nonevalid = mask>0elif detect_type=='detected':mask = cv2.imread(reader.color_files[i_frame].replace('rgb','mask_cosypose'), -1)valid = mask==ob_idelse:raise RuntimeErrorreturn validdef run_pose_estimation_worker(reader, i_frames, est:FoundationPose=None, debug=0, ob_id=None, device='cuda:0'):torch.cuda.set_device(device)est.to_device(device)est.glctx = dr.RasterizeCudaContext(device=device)result = NestDict()for i, i_frame in enumerate(i_frames):logging.info(f"{i}/{len(i_frames)}, i_frame:{i_frame}, ob_id:{ob_id}")print("\n### ", f"{i}/{len(i_frames)}, i_frame:{i_frame}, ob_id:{ob_id}")video_id = reader.get_video_id()color = reader.get_color(i_frame)depth = reader.get_depth(i_frame)id_str = reader.id_strs[i_frame]H,W = color.shape[:2]debug_dir =est.debug_dirob_mask = get_mask(reader, i_frame, ob_id, detect_type=detect_type)if ob_mask is None:logging.info("ob_mask not found, skip")result[video_id][id_str][ob_id] = np.eye(4)return resultest.gt_pose = reader.get_gt_pose(i_frame, ob_id)pose = est.register(K=reader.K, rgb=color, depth=depth, ob_mask=ob_mask, ob_id=ob_id)logging.info(f"pose:\n{pose}")if debug>=3:m = est.mesh_ori.copy()tmp = m.copy()tmp.apply_transform(pose)tmp.export(f'{debug_dir}/model_tf.obj')result[video_id][id_str][ob_id] = posereturn result, posedef run_pose_estimation():wp.force_load(device='cuda')reader_tmp = LinemodReader(opt.linemod_dir, split=None)print("## opt.linemod_dir:", opt.linemod_dir)debug = opt.debuguse_reconstructed_mesh = opt.use_reconstructed_meshdebug_dir = opt.debug_dirres = NestDict()glctx = dr.RasterizeCudaContext()mesh_tmp = trimesh.primitives.Box(extents=np.ones((3)), transform=np.eye(4)).to_mesh()est = FoundationPose(model_pts=mesh_tmp.vertices.copy(), model_normals=mesh_tmp.vertex_normals.copy(), symmetry_tfs=None, mesh=mesh_tmp, scorer=None, refiner=None, glctx=glctx, debug_dir=debug_dir, debug=debug)# ob_idmatch = re.search(r'\d+$', opt.linemod_dir)if match:last_number = match.group()ob_id = int(last_number)else:print("No digits found at the end of the string")# for ob_id in reader_tmp.ob_ids:if ob_id:if use_reconstructed_mesh:print("## ob_id:", ob_id)print("## opt.linemod_dir:", opt.linemod_dir)print("## opt.ref_view_dir:", opt.ref_view_dir)mesh = reader_tmp.get_reconstructed_mesh(ref_view_dir=opt.ref_view_dir)else:mesh = reader_tmp.get_gt_mesh(ob_id)# symmetry_tfs = reader_tmp.symmetry_tfs[ob_id] # !!!!!!!!!!!!!!!!args = []reader = LinemodReader(opt.linemod_dir, split=None)video_id = reader.get_video_id()# est.reset_object(model_pts=mesh.vertices.copy(), model_normals=mesh.vertex_normals.copy(), symmetry_tfs=symmetry_tfs, mesh=mesh) # rawest.reset_object(model_pts=mesh.vertices.copy(), model_normals=mesh.vertex_normals.copy(), mesh=mesh) # !!!!!!!!!!!!!!!!print("### len(reader.color_files):", len(reader.color_files))for i in range(len(reader.color_files)):args.append((reader, [i], est, debug, ob_id, "cuda:0"))# vis Datato_origin, extents = trimesh.bounds.oriented_bounds(mesh)bbox = np.stack([-extents/2, extents/2], axis=0).reshape(2,3)os.makedirs(f'{opt.linemod_dir}/track_vis', exist_ok=True)outs = []i = 0for arg in args[:200]:print("### num:", i)out, pose = run_pose_estimation_worker(*arg)outs.append(out)center_pose = pose@np.linalg.inv(to_origin)img_color = reader.get_color(i)vis = draw_posed_3d_box(reader.K, img=img_color, ob_in_cam=center_pose, bbox=bbox)vis = draw_xyz_axis(img_color, ob_in_cam=center_pose, scale=0.1, K=reader.K, thickness=3, transparency=0, is_input_rgb=True)imageio.imwrite(f'{opt.linemod_dir}/track_vis/{reader.id_strs[i]}.png', vis)i = i + 1for out in outs:for video_id in out:for id_str in out[video_id]:for ob_id in out[video_id][id_str]:res[video_id][id_str][ob_id] = out[video_id][id_str][ob_id]with open(f'{opt.debug_dir}/linemod_res.yml','w') as ff:yaml.safe_dump(make_yaml_dumpable(res), ff)print("Save linemod_res.yml OK !!!")if __name__=='__main__':parser = argparse.ArgumentParser()code_dir = os.path.dirname(os.path.realpath(__file__))parser.add_argument('--linemod_dir', type=str, default="/guopu/FoundationPose-main/model_free_ref_views/lm_test_all/000015", help="linemod root dir") # lm_test_all lm_testparser.add_argument('--use_reconstructed_mesh', type=int, default=1)parser.add_argument('--ref_view_dir', type=str, default="/guopu/FoundationPose-main/model_free_ref_views/lm_ref_views/ob_0000015")parser.add_argument('--debug', type=int, default=0)parser.add_argument('--debug_dir', type=str, default=f'/guopu/FoundationPose-main/model_free_ref_views/lm_test_all/debug') # lm_test_all lm_testopt = parser.parse_args()set_seed(0)detect_type = 'mask' # mask / box / detectedrun_pose_estimation()datareader.py
# Copyright (c) 2023, NVIDIA CORPORATION. All rights reserved.
#
# NVIDIA CORPORATION and its licensors retain all intellectual property
# and proprietary rights in and to this software, related documentation
# and any modifications thereto. Any use, reproduction, disclosure or
# distribution of this software and related documentation without an express
# license agreement from NVIDIA CORPORATION is strictly prohibited.from Utils import *
import json,os,sysBOP_LIST = ['lmo','tless','ycbv','hb','tudl','icbin','itodd']
BOP_DIR = os.getenv('BOP_DIR')def get_bop_reader(video_dir, zfar=np.inf):if 'ycbv' in video_dir or 'YCB' in video_dir:return YcbVideoReader(video_dir, zfar=zfar)if 'lmo' in video_dir or 'LINEMOD-O' in video_dir:return LinemodOcclusionReader(video_dir, zfar=zfar)if 'tless' in video_dir or 'TLESS' in video_dir:return TlessReader(video_dir, zfar=zfar)if 'hb' in video_dir:return HomebrewedReader(video_dir, zfar=zfar)if 'tudl' in video_dir:return TudlReader(video_dir, zfar=zfar)if 'icbin' in video_dir:return IcbinReader(video_dir, zfar=zfar)if 'itodd' in video_dir:return ItoddReader(video_dir, zfar=zfar)else:raise RuntimeErrordef get_bop_video_dirs(dataset):if dataset=='ycbv':video_dirs = sorted(glob.glob(f'{BOP_DIR}/ycbv/test/*'))elif dataset=='lmo':video_dirs = sorted(glob.glob(f'{BOP_DIR}/lmo/lmo_test_bop19/test/*'))elif dataset=='tless':video_dirs = sorted(glob.glob(f'{BOP_DIR}/tless/tless_test_primesense_bop19/test_primesense/*'))elif dataset=='hb':video_dirs = sorted(glob.glob(f'{BOP_DIR}/hb/hb_test_primesense_bop19/test_primesense/*'))elif dataset=='tudl':video_dirs = sorted(glob.glob(f'{BOP_DIR}/tudl/tudl_test_bop19/test/*'))elif dataset=='icbin':video_dirs = sorted(glob.glob(f'{BOP_DIR}/icbin/icbin_test_bop19/test/*'))elif dataset=='itodd':video_dirs = sorted(glob.glob(f'{BOP_DIR}/itodd/itodd_test_bop19/test/*'))else:raise RuntimeErrorreturn video_dirsclass YcbineoatReader:def __init__(self,video_dir, downscale=1, shorter_side=None, zfar=np.inf):self.video_dir = video_dirself.downscale = downscaleself.zfar = zfarself.color_files = sorted(glob.glob(f"{self.video_dir}/rgb/*.png"))self.K = np.loadtxt(f'{video_dir}/cam_K.txt').reshape(3,3)self.id_strs = []for color_file in self.color_files:id_str = os.path.basename(color_file).replace('.png','')self.id_strs.append(id_str)self.H,self.W = cv2.imread(self.color_files[0]).shape[:2]if shorter_side is not None:self.downscale = shorter_side/min(self.H, self.W)self.H = int(self.H*self.downscale)self.W = int(self.W*self.downscale)self.K[:2] *= self.downscaleself.gt_pose_files = sorted(glob.glob(f'{self.video_dir}/annotated_poses/*'))self.videoname_to_object = {'bleach0': "021_bleach_cleanser",'bleach_hard_00_03_chaitanya': "021_bleach_cleanser",'cracker_box_reorient': '003_cracker_box','cracker_box_yalehand0': '003_cracker_box','mustard0': '006_mustard_bottle','mustard_easy_00_02': '006_mustard_bottle','sugar_box1': '004_sugar_box','sugar_box_yalehand0': '004_sugar_box','tomato_soup_can_yalehand0': '005_tomato_soup_can',}def get_video_name(self):return self.video_dir.split('/')[-1]def __len__(self):return len(self.color_files)def get_gt_pose(self,i):try:pose = np.loadtxt(self.gt_pose_files[i]).reshape(4,4)return poseexcept:logging.info("GT pose not found, return None")return Nonedef get_color(self,i):color = imageio.imread(self.color_files[i])[...,:3]color = cv2.resize(color, (self.W,self.H), interpolation=cv2.INTER_NEAREST)return colordef get_mask(self,i):mask = cv2.imread(self.color_files[i].replace('rgb','masks'),-1)if len(mask.shape)==3:for c in range(3):if mask[...,c].sum()>0:mask = mask[...,c]breakmask = cv2.resize(mask, (self.W,self.H), interpolation=cv2.INTER_NEAREST).astype(bool).astype(np.uint8)return maskdef get_depth(self,i):depth = cv2.imread(self.color_files[i].replace('rgb','depth'),-1)/1e3depth = cv2.resize(depth, (self.W,self.H), interpolation=cv2.INTER_NEAREST)depth[(depth<0.1) | (depth>=self.zfar)] = 0return depthdef get_xyz_map(self,i):depth = self.get_depth(i)xyz_map = depth2xyzmap(depth, self.K)return xyz_mapdef get_occ_mask(self,i):hand_mask_file = self.color_files[i].replace('rgb','masks_hand')occ_mask = np.zeros((self.H,self.W), dtype=bool)if os.path.exists(hand_mask_file):occ_mask = occ_mask | (cv2.imread(hand_mask_file,-1)>0)right_hand_mask_file = self.color_files[i].replace('rgb','masks_hand_right')if os.path.exists(right_hand_mask_file):occ_mask = occ_mask | (cv2.imread(right_hand_mask_file,-1)>0)occ_mask = cv2.resize(occ_mask, (self.W,self.H), interpolation=cv2.INTER_NEAREST)return occ_mask.astype(np.uint8)def get_gt_mesh(self):ob_name = self.videoname_to_object[self.get_video_name()]YCB_VIDEO_DIR = os.getenv('YCB_VIDEO_DIR')mesh = trimesh.load(f'{YCB_VIDEO_DIR}/models/{ob_name}/textured_simple.obj')return meshclass BopBaseReader:def __init__(self, base_dir, zfar=np.inf, resize=1):self.base_dir = base_dirself.resize = resizeself.dataset_name = Noneself.color_files = sorted(glob.glob(f"{self.base_dir}/rgb/*"))if len(self.color_files)==0:self.color_files = sorted(glob.glob(f"{self.base_dir}/gray/*"))self.zfar = zfarself.K_table = {}with open(f'{self.base_dir}/scene_camera.json','r') as ff:info = json.load(ff)for k in info:self.K_table[f'{int(k):06d}'] = np.array(info[k]['cam_K']).reshape(3,3)self.bop_depth_scale = info[k]['depth_scale']if os.path.exists(f'{self.base_dir}/scene_gt.json'):with open(f'{self.base_dir}/scene_gt.json','r') as ff:self.scene_gt = json.load(ff)self.scene_gt = copy.deepcopy(self.scene_gt) # Release file handle to be pickle-able by joblibassert len(self.scene_gt)==len(self.color_files)else:self.scene_gt = Noneself.make_id_strs()def make_scene_ob_ids_dict(self):with open(f'{BOP_DIR}/{self.dataset_name}/test_targets_bop19.json','r') as ff:self.scene_ob_ids_dict = {}data = json.load(ff)for d in data:if d['scene_id']==self.get_video_id():id_str = f"{d['im_id']:06d}"if id_str not in self.scene_ob_ids_dict:self.scene_ob_ids_dict[id_str] = []self.scene_ob_ids_dict[id_str] += [d['obj_id']]*d['inst_count']def get_K(self, i_frame):K = self.K_table[self.id_strs[i_frame]]if self.resize!=1:K[:2,:2] *= self.resizereturn Kdef get_video_dir(self):video_id = int(self.base_dir.rstrip('/').split('/')[-1])return video_iddef make_id_strs(self):self.id_strs = []for i in range(len(self.color_files)):name = os.path.basename(self.color_files[i]).split('.')[0]self.id_strs.append(name)def get_instance_ids_in_image(self, i_frame:int):ob_ids = []if self.scene_gt is not None:name = int(os.path.basename(self.color_files[i_frame]).split('.')[0])for k in self.scene_gt[str(name)]:ob_ids.append(k['obj_id'])elif self.scene_ob_ids_dict is not None:return np.array(self.scene_ob_ids_dict[self.id_strs[i_frame]])else:mask_dir = os.path.dirname(self.color_files[0]).replace('rgb','mask_visib')id_str = self.id_strs[i_frame]mask_files = sorted(glob.glob(f'{mask_dir}/{id_str}_*.png'))ob_ids = []for mask_file in mask_files:ob_id = int(os.path.basename(mask_file).split('.')[0].split('_')[1])ob_ids.append(ob_id)ob_ids = np.asarray(ob_ids)return ob_idsdef get_gt_mesh_file(self, ob_id):raise RuntimeError("You should override this")def get_color(self,i):color = imageio.imread(self.color_files[i])if len(color.shape)==2:color = np.tile(color[...,None], (1,1,3)) # Gray to RGBif self.resize!=1:color = cv2.resize(color, fx=self.resize, fy=self.resize, dsize=None)return colordef get_depth(self,i, filled=False):if filled:depth_file = self.color_files[i].replace('rgb','depth_filled')depth_file = f'{os.path.dirname(depth_file)}/0{os.path.basename(depth_file)}'depth = cv2.imread(depth_file,-1)/1e3else:depth_file = self.color_files[i].replace('rgb','depth').replace('gray','depth')depth = cv2.imread(depth_file,-1)*1e-3*self.bop_depth_scaleif self.resize!=1:depth = cv2.resize(depth, fx=self.resize, fy=self.resize, dsize=None, interpolation=cv2.INTER_NEAREST)depth[depth<0.1] = 0depth[depth>self.zfar] = 0return depthdef get_xyz_map(self,i):depth = self.get_depth(i)xyz_map = depth2xyzmap(depth, self.get_K(i))return xyz_mapdef get_mask(self, i_frame:int, ob_id:int, type='mask_visib'):'''@type: mask_visib (only visible part) / mask (projected mask from whole model)'''pos = 0name = int(os.path.basename(self.color_files[i_frame]).split('.')[0])if self.scene_gt is not None:for k in self.scene_gt[str(name)]:if k['obj_id']==ob_id:breakpos += 1mask_file = f'{self.base_dir}/{type}/{name:06d}_{pos:06d}.png'if not os.path.exists(mask_file):logging.info(f'{mask_file} not found')return Noneelse:# mask_dir = os.path.dirname(self.color_files[0]).replace('rgb',type)# mask_file = f'{mask_dir}/{self.id_strs[i_frame]}_{ob_id:06d}.png'raise RuntimeErrormask = cv2.imread(mask_file, -1)if self.resize!=1:mask = cv2.resize(mask, fx=self.resize, fy=self.resize, dsize=None, interpolation=cv2.INTER_NEAREST)return mask>0def get_gt_mesh(self, ob_id:int):mesh_file = self.get_gt_mesh_file(ob_id)mesh = trimesh.load(mesh_file)mesh.vertices *= 1e-3return meshdef get_model_diameter(self, ob_id):dir = os.path.dirname(self.get_gt_mesh_file(self.ob_ids[0]))info_file = f'{dir}/models_info.json'with open(info_file,'r') as ff:info = json.load(ff)return info[str(ob_id)]['diameter']/1e3def get_gt_poses(self, i_frame, ob_id):gt_poses = []name = int(self.id_strs[i_frame])for i_k, k in enumerate(self.scene_gt[str(name)]):if k['obj_id']==ob_id:cur = np.eye(4)cur[:3,:3] = np.array(k['cam_R_m2c']).reshape(3,3)cur[:3,3] = np.array(k['cam_t_m2c'])/1e3gt_poses.append(cur)return np.asarray(gt_poses).reshape(-1,4,4)def get_gt_pose(self, i_frame:int, ob_id, mask=None, use_my_correction=False):ob_in_cam = np.eye(4)best_iou = -np.infbest_gt_mask = Nonename = int(self.id_strs[i_frame])for i_k, k in enumerate(self.scene_gt[str(name)]):if k['obj_id']==ob_id:cur = np.eye(4)cur[:3,:3] = np.array(k['cam_R_m2c']).reshape(3,3)cur[:3,3] = np.array(k['cam_t_m2c'])/1e3if mask is not None: # When multi-instance exists, use mask to determine which onegt_mask = cv2.imread(f'{self.base_dir}/mask_visib/{self.id_strs[i_frame]}_{i_k:06d}.png', -1).astype(bool)intersect = (gt_mask*mask).astype(bool)union = (gt_mask+mask).astype(bool)iou = float(intersect.sum())/union.sum()if iou>best_iou:best_iou = ioubest_gt_mask = gt_maskob_in_cam = curelse:ob_in_cam = curbreakif use_my_correction:if 'ycb' in self.base_dir.lower() and 'train_real' in self.color_files[i_frame]:video_id = self.get_video_id()if ob_id==1:if video_id in [12,13,14,17,24]:ob_in_cam = ob_in_cam@self.symmetry_tfs[ob_id][1]return ob_in_camdef load_symmetry_tfs(self):dir = os.path.dirname(self.get_gt_mesh_file(self.ob_ids[0]))info_file = f'{dir}/models_info.json'with open(info_file,'r') as ff:info = json.load(ff)self.symmetry_tfs = {}self.symmetry_info_table = {}for ob_id in self.ob_ids:self.symmetry_info_table[ob_id] = info[str(ob_id)]self.symmetry_tfs[ob_id] = symmetry_tfs_from_info(info[str(ob_id)], rot_angle_discrete=5)self.geometry_symmetry_info_table = copy.deepcopy(self.symmetry_info_table)def get_video_id(self):return int(self.base_dir.split('/')[-1])class LinemodOcclusionReader(BopBaseReader):def __init__(self,base_dir='/mnt/9a72c439-d0a7-45e8-8d20-d7a235d02763/DATASET/LINEMOD-O/lmo_test_all/test/000002', zfar=np.inf):super().__init__(base_dir, zfar=zfar)self.dataset_name = 'lmo'self.K = list(self.K_table.values())[0]self.ob_ids = [1,5,6,8,9,10,11,12]self.ob_id_to_names = {1: 'ape',2: 'benchvise',3: 'bowl',4: 'camera',5: 'water_pour',6: 'cat',7: 'cup',8: 'driller',9: 'duck',10: 'eggbox',11: 'glue',12: 'holepuncher',13: 'iron',14: 'lamp',15: 'phone',}# self.load_symmetry_tfs()def get_gt_mesh_file(self, ob_id):mesh_dir = f'{BOP_DIR}/{self.dataset_name}/models/obj_{ob_id:06d}.ply'return mesh_dirclass LinemodReader(LinemodOcclusionReader):def __init__(self, base_dir='/mnt/9a72c439-d0a7-45e8-8d20-d7a235d02763/DATASET/LINEMOD/lm_test_all/test/000001', zfar=np.inf, split=None):super().__init__(base_dir, zfar=zfar)self.dataset_name = 'lm'if split is not None: # train/testprint("## split is not None")with open(f'/mnt/9a72c439-d0a7-45e8-8d20-d7a235d02763/DATASET/LINEMOD/Linemod_preprocessed/data/{self.get_video_id():02d}/{split}.txt','r') as ff:lines = ff.read().splitlines()self.color_files = []for line in lines:id = int(line)self.color_files.append(f'{self.base_dir}/rgb/{id:06d}.png')self.make_id_strs()self.ob_ids = np.setdiff1d(np.arange(1,16), np.array([7,3])).tolist() # Exclude bowl and mug# self.load_symmetry_tfs()def get_gt_mesh_file(self, ob_id):root = self.base_dirprint(f'{root}/../')print(f'{root}/lm_models')print(f'{root}/lm_models/models/obj_{ob_id:06d}.ply')while 1:if os.path.exists(f'{root}/lm_models'):mesh_dir = f'{root}/lm_models/models/obj_{ob_id:06d}.ply'breakelse:root = os.path.abspath(f'{root}/../')mesh_dir = f'{root}/lm_models/models/obj_{ob_id:06d}.ply'breakreturn mesh_dirdef get_reconstructed_mesh(self, ref_view_dir):mesh = trimesh.load(os.path.abspath(f'{ref_view_dir}/model/model.obj'))return meshclass YcbVideoReader(BopBaseReader):def __init__(self, base_dir, zfar=np.inf):super().__init__(base_dir, zfar=zfar)self.dataset_name = 'ycbv'self.K = list(self.K_table.values())[0]self.make_id_strs()self.ob_ids = np.arange(1,22).astype(int).tolist()YCB_VIDEO_DIR = os.getenv('YCB_VIDEO_DIR')self.ob_id_to_names = {}self.name_to_ob_id = {}# names = sorted(os.listdir(f'{YCB_VIDEO_DIR}/models/'))if os.path.exists(f'{YCB_VIDEO_DIR}/models/'):names = sorted(os.listdir(f'{YCB_VIDEO_DIR}/models/'))for i,ob_id in enumerate(self.ob_ids):self.ob_id_to_names[ob_id] = names[i]self.name_to_ob_id[names[i]] = ob_idelse:names = []if 0:# if 'BOP' not in self.base_dir:with open(f'{self.base_dir}/../../keyframe.txt','r') as ff:self.keyframe_lines = ff.read().splitlines()# self.load_symmetry_tfs()'''for ob_id in self.ob_ids:if ob_id in [1,4,6,18]: # Cylinderself.geometry_symmetry_info_table[ob_id] = {'symmetries_continuous': [{'axis':[0,0,1], 'offset':[0,0,0]},],'symmetries_discrete': euler_matrix(0, np.pi, 0).reshape(1,4,4).tolist(),}elif ob_id in [13]:self.geometry_symmetry_info_table[ob_id] = {'symmetries_continuous': [{'axis':[0,0,1], 'offset':[0,0,0]},],}elif ob_id in [2,3,9,21]: # Rectangle boxtfs = []for rz in [0, np.pi]:for rx in [0,np.pi]:for ry in [0,np.pi]:tfs.append(euler_matrix(rx, ry, rz))self.geometry_symmetry_info_table[ob_id] = {'symmetries_discrete': np.asarray(tfs).reshape(-1,4,4).tolist(),}else:pass'''def get_gt_mesh_file(self, ob_id):if 'BOP' in self.base_dir:mesh_file = os.path.abspath(f'{self.base_dir}/../../ycbv_models/models/obj_{ob_id:06d}.ply')else:mesh_file = f'{self.base_dir}/../../ycbv_models/models/obj_{ob_id:06d}.ply'return mesh_filedef get_gt_mesh(self, ob_id:int, get_posecnn_version=False):if get_posecnn_version:YCB_VIDEO_DIR = os.getenv('YCB_VIDEO_DIR')mesh = trimesh.load(f'{YCB_VIDEO_DIR}/models/{self.ob_id_to_names[ob_id]}/textured_simple.obj')return meshmesh_file = self.get_gt_mesh_file(ob_id)mesh = trimesh.load(mesh_file, process=False)mesh.vertices *= 1e-3tex_file = mesh_file.replace('.ply','.png')if os.path.exists(tex_file):from PIL import Imageim = Image.open(tex_file)uv = mesh.visual.uvmaterial = trimesh.visual.texture.SimpleMaterial(image=im)color_visuals = trimesh.visual.TextureVisuals(uv=uv, image=im, material=material)mesh.visual = color_visualsreturn meshdef get_reconstructed_mesh(self, ob_id, ref_view_dir):mesh = trimesh.load(os.path.abspath(f'{ref_view_dir}/ob_{ob_id:07d}/model/model.obj'))return meshdef get_transform_reconstructed_to_gt_model(self, ob_id):out = np.eye(4)return outdef get_visible_cloud(self, ob_id):file = os.path.abspath(f'{self.base_dir}/../../models/{self.ob_id_to_names[ob_id]}/visible_cloud.ply')pcd = o3d.io.read_point_cloud(file)return pcddef is_keyframe(self, i):color_file = self.color_files[i]video_id = self.get_video_id()frame_id = int(os.path.basename(color_file).split('.')[0])key = f'{video_id:04d}/{frame_id:06d}'return (key in self.keyframe_lines)class TlessReader(BopBaseReader):def __init__(self, base_dir, zfar=np.inf):super().__init__(base_dir, zfar=zfar)self.dataset_name = 'tless'self.ob_ids = np.arange(1,31).astype(int).tolist()self.load_symmetry_tfs()def get_gt_mesh_file(self, ob_id):mesh_file = f'{self.base_dir}/../../../models_cad/obj_{ob_id:06d}.ply'return mesh_filedef get_gt_mesh(self, ob_id):mesh = trimesh.load(self.get_gt_mesh_file(ob_id))mesh.vertices *= 1e-3mesh = trimesh_add_pure_colored_texture(mesh, color=np.ones((3))*200)return meshclass HomebrewedReader(BopBaseReader):def __init__(self, base_dir, zfar=np.inf):super().__init__(base_dir, zfar=zfar)self.dataset_name = 'hb'self.ob_ids = np.arange(1,34).astype(int).tolist()self.load_symmetry_tfs()self.make_scene_ob_ids_dict()def get_gt_mesh_file(self, ob_id):mesh_file = f'{self.base_dir}/../../../hb_models/models/obj_{ob_id:06d}.ply'return mesh_filedef get_gt_pose(self, i_frame:int, ob_id, use_my_correction=False):logging.info("WARN HomeBrewed doesn't have GT pose")return np.eye(4)class ItoddReader(BopBaseReader):def __init__(self, base_dir, zfar=np.inf):super().__init__(base_dir, zfar=zfar)self.dataset_name = 'itodd'self.make_id_strs()self.ob_ids = np.arange(1,29).astype(int).tolist()self.load_symmetry_tfs()self.make_scene_ob_ids_dict()def get_gt_mesh_file(self, ob_id):mesh_file = f'{self.base_dir}/../../../itodd_models/models/obj_{ob_id:06d}.ply'return mesh_fileclass IcbinReader(BopBaseReader):def __init__(self, base_dir, zfar=np.inf):super().__init__(base_dir, zfar=zfar)self.dataset_name = 'icbin'self.ob_ids = np.arange(1,3).astype(int).tolist()self.load_symmetry_tfs()def get_gt_mesh_file(self, ob_id):mesh_file = f'{self.base_dir}/../../../icbin_models/models/obj_{ob_id:06d}.ply'return mesh_fileclass TudlReader(BopBaseReader):def __init__(self, base_dir, zfar=np.inf):super().__init__(base_dir, zfar=zfar)self.dataset_name = 'tudl'self.ob_ids = np.arange(1,4).astype(int).tolist()self.load_symmetry_tfs()def get_gt_mesh_file(self, ob_id):mesh_file = f'{self.base_dir}/../../../tudl_models/models/obj_{ob_id:06d}.ply'return mesh_file运行run_linemod.py:
python run_linemod.py能看到文件夹model_free_ref_views/lm_test_all/000015/track_vis/
里面存放可视化结果:
分享完成~
本文先介绍到这里,后面会分享“6D位姿估计”的其它数据集、算法、代码、具体应用示例。
相关文章:
【6D位姿估计】FoundationPose 跑通demo 训练记录
前言 本文记录在FoundationPose中,跑通基于CAD模型为输入的demo,输出位姿信息,可视化结果。 然后分享NeRF物体重建部分的训练,以及RGBD图为输入的demo。 1、搭建环境 方案1:基于docker镜像(推荐…...

Python 中 “yield“ 的不同行为
在我们使用Python编译过程中,yield 关键字用于定义生成器函数,它的作用是将函数变成一个生成器,可以迭代产生值。yield 的行为在不同的情况下会有不同的效果和用途。 1、问题背景 在 Python 中,“yield” 是一种生成器࿰…...

迅睿CMS中实现关键词搜索高亮
在迅睿CMS系统中实现关键词搜索高亮是提升用户体验和搜索效果的重要手段。当用户搜索某个关键词时,将搜索结果中的关键词高亮显示,可以帮助用户更快速地定位到所需信息。 关键词高亮的实现 在迅睿CMS中,你可以使用内置的dr_keyword_highlig…...
晶振的精度与稳定性有什么关系?
晶振的精度和稳定性是电子设备中非常重要的参数,它们受到多种因素的影响,主要包括: 精度的影响因素: 温度变化:晶体的温度系数会使得频率随温度变化而变化,通常在0C到55C的工业标准温度范围内,…...

【C】137 只出现一次的数字
给你一个整数数组 nums ,除某个元素仅出现 一次 外,其余每个元素都恰出现 三次 。请你找出并返回那个只出现了一次的元素。 你必须设计并实现线性时间复杂度的算法且使用常数级空间来解决此问题。 解法一 #include <stdio.h>int singleNumber(i…...
51单片机入门:DS1302时钟
51单片机内部含有晶振,可以实现定时/计数功能。但是其缺点有:精度往往不高、不能掉电使用等。 我们可以通过DS1302时钟芯片来解决以上的缺点。 DS1302时钟芯片 功能:DS1302是一种低功耗实时时钟芯片,内部有自动的计时功能&#x…...

Redis-5 分布式锁
一.为什么要使用分布式锁? 传统的互斥锁synchronized只能作用于同一台虚拟机上的线程,在使用服务器集群部署的情况下,互斥锁就会失效,因此要采用分布式锁来处理不同服务器上的线程访问同一资源的情况。 二.redis的分布式锁是如何…...

音转文工具,9.8k star! 【送源码】
我们经常会遇到将音频转为文字的情况,比如在开会时录音的会议纪要、上课时录下的老师讲课内容。虽然网上也有一些在线的工具可以将音频转为文字,但是考虑到数据安全和费用问题,使用起来也不是很方便。 今天了不起给大家介绍一款开源工具——…...

【首次发布】华为 OD 机试 C卷抽中题库清单(真题库),目前华为OD机考以C卷为主,特殊情况会发送D卷
本篇博客为大家整理华为 OD 考友反馈 C 卷抽中题,经过 1 个的考友复盘,目前已经收录 100 题目,预计在有 2 周可以收集完整。 所有题目,都有考友截图反馈,同时欢迎大家机考过后,提供橡皮擦真题,获…...
【进程等待】waitpid的参数pid | status的位图位操作WIFEXITEDWEXITSTATUS宏
目录 waitpid pid status status位图 status按位操作 输入型参数和输入型参数 宏WIFEXITED&WEXITSTATUS options&非阻塞等待 上篇进程等待我们介绍到怎样去进程等待。我们介绍了wait函数&阻塞等待。本篇我们将介绍waitpid函数的参数pid和status。 waitp…...

unity---常用API
1. Vector3:结构体由x、y、z这3个数值组成,表示一个向量 magnitude变量返回该向量的长度normalized变量返回 magnitude 为 1 时的该向量zero静态变量Vector3(0, 0, 0)one静态变量Vector3(1, 1, 1)forward静态变量Vector3(0, 0, 1)back静态变量Vector3(0…...
设计模式: 模板模式
目录 一,模板模式 二,特点 三,组成部分 四,实现步骤 五,案例 一,模板模式 模板模式(Template Pattern)是一种行为型设计模式,它在超类中定义了一个算法的骨架&#…...

[虚拟机+单机]梦幻契约H5修复版_附GM工具
本教程仅限学习使用,禁止商用,一切后果与本人无关,此声明具有法律效应!!!! 教程是本人亲自搭建成功的,绝对是完整可运行的,踩过的坑都给你们填上了 视频演示 [虚拟机单…...

头文件相互包含 前向声明
当两个类需要相互访问对方的成员或方法时,通常意味着它们之间存在某种依赖关系。这种依赖关系可能源于类的设计或功能需求。以下是一个简单的例子,展示了当两个类需要相互访问对方成员或方法时,如何使用包含对方头文件的方式来解决循环包含的…...
七款好用的上网行为管理软件推荐 |有没有好用的上网行为管理系统
七款好用的上网行为管理软件推荐 |有没有好用的上网行为管理系统 员工上班刷视频! 员工上班炒股! 员工上班干副业! 碰见这种情况怎么办?当然是用电脑监控软件来监视员工的一举一动了,那么这样的软件有哪些呢&#…...

centos7-bcc 安装
检查 内核信息 确保安装的kernel-dev 和内核版本一致!!! rpm -qa|grep kernel kernel-tools-3.10.0-1160.92.1.el7.x86_64 kernel-devel-3.10.0-1160.92.1.el7.x86_64 kernel-headers-3.10.0-1160.92.1.el7.x86_64 kernel-3.10.0-1160.92.1.el7.x86_64 kernel-tools-libs-3.1…...
5.06号模拟前端面试8问
5.06号模拟前端面试8问 1.promise如何实现then处理 在JavaScript中,Promise 是一个代表异步操作最终完成或失败的对象。它有三种状态:pending(等待),fulfilled(完成),rejected&…...

解读Inscode AI:开启代码智能化的新时代
导语: 近年来,人工智能技术的迅猛发展已经深刻地影响着各个行业,而在软件开发领域,Inscode AI的出现无疑将给代码智能化带来一场革命。本文将为大家解读Inscode AI的特点和应用,探索其如何改变我们的软件开发方式。 一…...

快速了解Vuex
Vuex Vuex使用Vuex Vuex 📌vuex 是一个专为 Vue.js 应用程序开发的状态管理库 📌vuex 可以在多个组件之间共享数据,并且共享的数据是响应式的,即数据的变更能及时渲染到模板 📌vuex 采用集中式存储管理所有组件的状态…...
vue管理系统导航中添加新的iconfont的图标
1.在官网上将需要的图标,加入项目中,下载 2.下载的压缩包中,可以选择这两个,复制到项目目录中 3.如果和之前的iconfont有重复,那么就重新命名 4.将这里的.ttf文件,也重命名为自己的 5.在main文件中导入 6.在…...

0 基础入门 Agent:理论知识体系搭建指南
本文档系统梳理 AI Agent 的核心理论知识,帮助理解”为什么这样设计”,为动手构建 Agent 打下认知基础。 1. 从 LLM 到 Agent:为什么需要 Agent 1.1 LLM 的能力与局限 大语言模型(LLM)本质上是一个”文本补全机器”…...

突破黑暗:基于多曝光融合的YOLOv7低光照目标检测全面实战
摘要 在自动驾驶、夜间监控、水下探测等应用场景中,低光照环境下的目标检测一直是一个极具挑战性的难题。传统方法往往难以在极暗条件下提取有效的特征信息,导致检测精度大幅下降。本文将介绍一种创新的解决方案——将多曝光融合技术与YOLOv7相结合,通过融合不同曝光度的图…...

高效洽谈订单:用3分钟时间说清楚产品如何帮助工厂节省人工
高效洽谈订单:用3分钟时间说清楚产品如何帮助工厂节省人工制造业的客户并不会关心你的产品有多么先进,他们只关心一件事情:能不能帮助他们减少雇佣人数、减少加班时间、减少需要操心的事情。如果销售人员能够在3分钟之内清晰地计算出“能够节…...

长沙GEO优化公司怎么选?2026年服务商对比与判断指南
在生成式人工智能逐渐成为主流信息入口的背景下,企业内容是否能被AI系统识别与引用,直接影响曝光与获客效率。因此,越来越多企业开始关注GEO优化公司(生成式引擎优化服务商),希望通过专业服务提升在AI问答系…...

## 22|Python gRPC 微服务治理:超时、重试与接口兼容策略
22|Python gRPC 微服务治理:超时、重试与接口兼容策略 文章目录 22|Python gRPC 微服务治理:超时、重试与接口兼容策略 摘要 SEO 摘要 目录 gRPC 线上常见故障 治理策略 Python 代码示意 案例复盘 案例复盘二 架构权衡对比表(A/B/C) 可执行实验步骤 发布后7天观察指标模板…...

Leather Dress Collection 快速上手:10分钟完成镜像拉取与首次推理
Leather Dress Collection 快速上手:10分钟完成镜像拉取与首次推理 你是不是也对AI绘画感兴趣,但被复杂的本地部署、环境配置劝退了?想试试那些能生成惊艳图片的模型,却不知道从何下手? 今天,我就带你体验…...
:为什么你的FD帧总在500kbps以上丢包?)
CAN FD协议栈调试失效全记录(附可复现源码+Wireshark自定义解码器):为什么你的FD帧总在500kbps以上丢包?
第一章:CAN FD协议栈调试失效全记录(附可复现源码Wireshark自定义解码器):为什么你的FD帧总在500kbps以上丢包?CAN FD在高速段(>500 kbps)频繁丢包,往往并非物理层故障࿰…...

Pixel Dimension Fissioner惊艳效果:技术白皮书→极客风/文艺风/传播风裂变
Pixel Dimension Fissioner惊艳效果:技术白皮书→极客风/文艺风/传播风裂变 1. 像素世界的文字炼金术 在数字创作的浩瀚宇宙中,Pixel Dimension Fissioner(像素维度裂变器)犹如一座16-bit像素风格的炼金工坊。这款基于MT5-Zero-…...

【DiT视频生成技术】第二章 核心机制的技术实现
目录 第二章 核心机制的技术实现 2.1 时空注意力机制的工程实现与优化 2.2 条件注入与多模态控制机制 2.3 分布式训练与规模化实现 第二章 核心机制的技术实现 现代视频生成系统面临的核心挑战在于如何有效建模高维时空数据的联合分布。与图像生成不同,视频数据引入了时间…...

QMI8658C IMU驱动开发与嵌入式移植实战指南
1. QMI8658C IMU驱动库深度解析:面向嵌入式工程师的底层实践指南1.1 芯片级特性与工程定位QMI8658C是由Qorvo公司推出的高性能6轴惯性测量单元(IMU),采用3.3V单电源供电,封装尺寸仅为2.0mm 2.0mm 0.7mm,专…...