计算方法实验9:Romberg积分求解速度、位移
任务

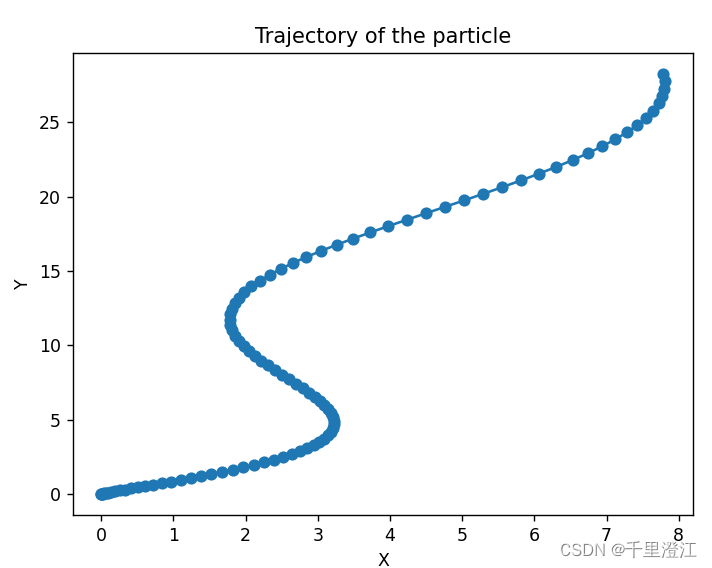
- 输出质点的轨迹 ( x ( t ) , y ( t ) ) , t ∈ { 0.1 , 0.2 , 0.3 , . . . , 10 } (x(t), y(t)), t\in \{0.1, 0.2, 0.3, ..., 10\} (x(t),y(t)),t∈{0.1,0.2,0.3,...,10},并在二维平面中画出该轨迹.
- 请比较M分别取4, 8, 12, 16, 20 时,Romberg积分达到要求精度的比例(达到误差要求的次数/调用总次数),分析该比例随M 的变化。
算法
现在要用数值方法求 ∫ a b f ( x ) d x \int_{a}^{b} f(x) \, dx ∫abf(x)dx,设 h = b − a n h=\frac{b-a}{n} h=nb−a,已知:
复化梯形积分 T n ( f ) = h [ 1 2 f ( a ) + ∑ i = 1 n − 1 f ( a + i h ) + 1 2 f ( b ) ] T_{n}\left(f\right)=h\left[\frac{1}{2}f\left(a\right)+\sum_{i=1}^{n-1}f\left(a+ih\right)+\frac{1}{2}f\left(b\right)\right] Tn(f)=h[21f(a)+∑i=1n−1f(a+ih)+21f(b)]、
复化Simpson积分 S n ( f ) = h 3 [ f ( a ) + 4 ∑ i = 0 m − 1 f ( x 2 i + 1 ) + 2 ∑ i = 1 m − 1 f ( x 2 i ) + f ( b ) ] S_{n}\left(f\right)=\frac{h}{3}\left[f\left(a\right)+4\sum_{i=0}^{m-1}f\left(x_{2i+1}\right)+2\sum_{i=1}^{m-1}f\left(x_{2i}\right)+f\left(b\right)\right] Sn(f)=3h[f(a)+4∑i=0m−1f(x2i+1)+2∑i=1m−1f(x2i)+f(b)].
将 ( T n ( f ) − T 2 n ( f ) ) ( T_n( f) - T_{2n}( f) ) (Tn(f)−T2n(f)) 作 为 T 2 n ( f ) T_{2n}(f) T2n(f)的修正值补充到 I ( f ) I(f) I(f),即
I ( f ) ≈ T 2 n ( f ) + 1 3 ( T 2 n ( f ) − T n ( f ) ) = 4 3 T 2 n − 1 3 T n = S n I(f)\approx T_{2n}(f)+\frac{1}{3}\left(T_{2n}\left(f\right)-T_{n}\left(f\right)\right)=\frac{4}{3}T_{2n}-\frac{1}{3}T_{n}=S_{n} I(f)≈T2n(f)+31(T2n(f)−Tn(f))=34T2n−31Tn=Sn
其结果是将复化梯形求积公式组合成复化 Simpson 求积公式, 截断误差由 O ( h 2 ) O(h^2) O(h2)提高到 O ( h 4 ) O(h^4) O(h4),这种手段称为外推算法,该算法在不增加计算量的前提下提高了误差的精度.不妨对 S 2 n ( f ) , S n ( f ) S_{2n}(f),S_n(f) S2n(f),Sn(f)再作一次线性组合:
I ( f ) − S n ( f ) = − f ( 4 ) ( ξ ) 180 h 4 ( b − a ) ≈ d h 4 I\left(f\right)-S_{n}\left(f\right)=-\frac{f^{\left(4\right)}\left(\xi\right)}{180}h^{4}\left(b-a\right)\approx dh^{4} I(f)−Sn(f)=−180f(4)(ξ)h4(b−a)≈dh4
I ( f ) − S 2 n ( f ) = − f ( 4 ) ( η ) 180 ( h 2 ) 4 ( b − a ) ≈ d ( h 2 ) 4 I(f)-S_{2n}(f)=-\frac{f^{(4)}(\eta)}{180}\left(\frac{h}{2}\right)^{4}(b-a)\approx d\left(\frac{h}{2}\right)^{4} I(f)−S2n(f)=−180f(4)(η)(2h)4(b−a)≈d(2h)4
I ( f ) ≈ S 2 n ( f ) + 1 15 ( S 2 n ( f ) − S n ( f ) ) = C n ( f ) I\left(f\right)\approx S_{2n}\left(f\right)+\frac{1}{15}\left(S_{2n}\left(f\right)-S_{n}\left(f\right)\right)=C_{n}\left(f\right) I(f)≈S2n(f)+151(S2n(f)−Sn(f))=Cn(f)
复化 Simpson 公式组成复化 Cotes 公式,其截断误差是 O ( h 6 ) . O(h^6). O(h6).同理对 Cotes公式进行线性组合:
I ( f ) − C 2 n ( f ) = e ( h 2 ) 6 I ( f ) − C n ( f ) = e h 6 I\left(f\right)-C_{2n}\left(f\right)=e\left(\frac{h}{2}\right)^{6}\\I\left(f\right)-C_{n}\left(f\right)=eh^{6} I(f)−C2n(f)=e(2h)6I(f)−Cn(f)=eh6
得到具有 7 次代数精度和截断误差是 O ( h 8 ) O(h^8) O(h8)的 Romberg 公式:
R n ( f ) = C 2 n ( f ) + 1 63 ( C 2 n ( f ) − C n ( f ) ) R_{n}\left(f\right)=C_{2n}\left(f\right)+\frac{1}{63}\left(C_{2n}\left(f\right)-C_{n}\left(f\right)\right) Rn(f)=C2n(f)+631(C2n(f)−Cn(f))
为了便于在计算机上实现 Romberg 算法,将 T n , S n , C n , R n , ⋯ T_n,S_n,C_n,R_n,\cdots Tn,Sn,Cn,Rn,⋯统一用 R k , j R_{k,j} Rk,j 表示,列标 j = 1 , 2 , 3 , 4 j=1,2,3,4 j=1,2,3,4分别表示梯形、Simpson、Cotes 、Romberg积分,行标 k k k表示步长 h k = h 2 k − 1 h_k=\frac h{2^{k-1}} hk=2k−1h,得到Romberg 计算公式:
R k , j = R k , j − 1 + R k , j − 1 − R k − 1 , j − 1 4 j − 1 − 1 , k = 2 , 3 , ⋯ R_{k,j}=R_{k,j-1}+\frac{R_{k,j-1}-R_{k-1,j-1}}{4^{j-1}-1},k=2,3,\cdots Rk,j=Rk,j−1+4j−1−1Rk,j−1−Rk−1,j−1,k=2,3,⋯
对每一个 k , j k,j k,j从 2 做到 k k k,一直做到 ∣ R k , k − R k − 1 , k − 1 ∣ |R_k,k-R_{k-1,k-1}| ∣Rk,k−Rk−1,k−1∣小于给定控制精度时停止计算.
注:下面代码中数组下标从0开始.
代码
C++实现Romberg积分运算
#include<bits/stdc++.h>
using namespace std;int satisfiedCount;long double ax(long double t);
long double ay(long double t);
long double romberg(function<long double(long double)> f, long double a, long double b, long double eps, int maxIter, bool isX);// Perform the Romberg integrationint main()
{long double eps = 1e-6, proportion;int maxIter;satisfiedCount = 0;maxIter = 4;cout << "maxIter = " << maxIter << endl;for (long double t = 0.1; t <= 10; t += 0.1) { long double vx = romberg(ax, 0, t, eps, maxIter, 0);long double vy = romberg(ay, 0, t, eps, maxIter, 0);long double x = romberg([&](long double t) { return vx; }, 0, t, eps, maxIter, 1);long double y = romberg([&](long double t) { return vy; }, 0, t, eps, maxIter, 0);cout << fixed << setprecision(1) << "At t = " << t << ", vx = " << setprecision(6) << vx << ", vy = " << setprecision(6) << vy << ", " << "(x, y) = (" << setprecision(6) << x << ", " << setprecision(6) << y << ")" << endl;}proportion = (long double)satisfiedCount / 100;cout << "At maxIter = " << maxIter << ", proportion of times the error requirement of x was satisfied: " << proportion << endl;satisfiedCount = 0;maxIter = 8;cout << "maxIter = " << maxIter << endl;ofstream outFile("trajectory.txt");for (long double t = 0.1; t <= 10; t += 0.1) {long double vx = romberg(ax, 0, t, eps, maxIter, 0);long double vy = romberg(ay, 0, t, eps, maxIter, 0);long double x = romberg([&](long double t) { return vx; }, 0, t, eps, maxIter, 1);long double y = romberg([&](long double t) { return vy; }, 0, t, eps, maxIter, 0);cout << fixed << setprecision(1) << "At t = " << t << ", vx = " << setprecision(6) << vx << ", vy = " << setprecision(6) << vy << ", " << "(x, y) = (" << setprecision(6) << x << ", " << setprecision(6) << y << ")" << endl;outFile << fixed << setprecision(6) << x << " " << y << "\n";//把坐标写入文件,方便画轨迹}proportion = (long double)satisfiedCount / 100;cout << "At maxIter = " << maxIter << ", proportion of times the error requirement of x was satisfied: " << proportion << endl;satisfiedCount = 0;maxIter = 12;cout << "maxIter = " << maxIter << endl;for (long double t = 0.1; t <= 10; t += 0.1) {long double vx = romberg(ax, 0, t, eps, maxIter, 0);long double vy = romberg(ay, 0, t, eps, maxIter, 0);long double x = romberg([&](long double t) { return vx; }, 0, t, eps, maxIter, 1);long double y = romberg([&](long double t) { return vy; }, 0, t, eps, maxIter, 0);cout << fixed << setprecision(1) << "At t = " << t << ", vx = " << setprecision(6) << vx << ", vy = " << setprecision(6) << vy << ", " << "(x, y) = (" << setprecision(6) << x << ", " << setprecision(6) << y << ")" << endl;}proportion = (long double)satisfiedCount / 100;cout << "At maxIter = " << maxIter << ", proportion of times the error requirement of x was satisfied: " << proportion << endl;satisfiedCount = 0;maxIter = 16;cout << "maxIter = " << maxIter << endl;for (long double t = 0.1; t <= 10; t += 0.1) {long double vx = romberg(ax, 0, t, eps, maxIter, 0);long double vy = romberg(ay, 0, t, eps, maxIter, 0);long double x = romberg([&](long double t) { return vx; }, 0, t, eps, maxIter, 1);long double y = romberg([&](long double t) { return vy; }, 0, t, eps, maxIter, 0);cout << fixed << setprecision(1) << "At t = " << t << ", vx = " << setprecision(6) << vx << ", vy = " << setprecision(6) << vy << ", " << "(x, y) = (" << setprecision(6) << x << ", " << setprecision(6) << y << ")" << endl;}proportion = (long double)satisfiedCount / 100;cout << "At maxIter = " << maxIter << ", proportion of times the error requirement of x was satisfied: " << proportion << endl;satisfiedCount = 0;maxIter = 20;cout << "maxIter = " << maxIter << endl;for (long double t = 0.1; t < 10.1; t += 0.1) {long double vx = romberg(ax, 0, t, eps, maxIter, 0);long double vy = romberg(ay, 0, t, eps, maxIter, 0);long double x = romberg([&](long double t) { return vx; }, 0, t, eps, maxIter, 1);long double y = romberg([&](long double t) { return vy; }, 0, t, eps, maxIter, 0);cout << fixed << setprecision(1) << "At t = " << t << ", vx = " << setprecision(6) << vx << ", vy = " << setprecision(6) << vy << ", " << "(x, y) = (" << setprecision(6) << x << ", " << setprecision(6) << y << ")" << endl;}proportion = (long double)satisfiedCount / 100;cout << "At maxIter = " << maxIter << ", proportion of times the error requirement of x was satisfied: " << proportion << endl;return 0;
}long double ax(long double t)
{return sin(t) / (1 + sqrt(t));
}long double ay(long double t)
{return log(t + 1) / (t + 1);
}// Perform the Romberg integration
long double romberg(function<long double(long double)> f, long double a, long double b, long double eps, int maxIter, bool isX) {long double h[maxIter], r[maxIter][maxIter];h[0] = b - a;r[0][0] = 0.5 * h[0] * (f(a) + f(b));for (int i = 1; i < maxIter; i++) {h[i] = 0.5 * h[i-1];long double sum = 0;for (int k = 0; k < pow(2, i-1); k++)sum += f(a + (2*k+1) * h[i]);r[i][0] = 0.5 * r[i-1][0] + h[i] * sum;for (int j = 1; j <= i; j++)r[i][j] = r[i][j-1] + (r[i][j-1] - r[i-1][j-1]) / (pow(4, j) - 1);if (i > 1 && fabs(r[i][i] - r[i-1][i-1]) < eps){if(isX)satisfiedCount++;return r[i][i];}}return r[maxIter-1][maxIter-1];
}
python可视化运动轨迹
import matplotlib.pyplot as pltwith open('trajectory.txt', 'r') as file:lines = file.readlines()x, y = zip(*[(float(line.split()[0]), float(line.split()[1])) for line in lines])plt.plot(x, y, 'o-')
plt.xlabel('X')
plt.ylabel('Y')
plt.title('Plot of points with smooth curve')
plt.show()
结果
部分运算结果

轨迹可视化结果
相关文章:
计算方法实验9:Romberg积分求解速度、位移
任务 输出质点的轨迹 ( x ( t ) , y ( t ) ) , t ∈ { 0.1 , 0.2 , 0.3 , . . . , 10 } (x(t), y(t)), t\in \{0.1, 0.2, 0.3, ..., 10\} (x(t),y(t)),t∈{0.1,0.2,0.3,...,10},并在二维平面中画出该轨迹.请比较M分别取4, 8, 12, 16, 20 时,Romberg积分达…...

设计模式有哪些基本原则
目录 开闭原则(Open Closed Principle) 里氏替换原则(Liskov Substitution principle) 单一职责原则(Single Responsibility Principle,SRP)...
别再出错了!华为交换机到底如何配置access、trunk、hybird端口?
号主:老杨丨11年资深网络工程师,更多网工提升干货,请关注公众号:网络工程师俱乐部 下午好,我的网工朋友。 我们都知道,网络工程师的工作离不开对交换机的熟练操作。华为交换机的配置,绝对是考验…...

OceanBase 分布式数据库【信创/国产化】- OceanBase 平台产品 - 迁移评估工具 OMA
本心、输入输出、结果 文章目录 OceanBase 分布式数据库【信创/国产化】- OceanBase 平台产品 - 迁移评估工具 OMA前言OceanBase 数据更新架构OceanBase 平台产品 - 迁移评估工具 OMA兼容性评估性能评估导出 OceanBase 数据库对象和 SQL 语句OceanBase 分布式数据库【信创/国产…...
UE5入门学习笔记(六)——编译低版本插件
对于有些低版本的插件,可以通过此方法自己编译到高版本而无需等待插件作者更新 使用工具:如图所示 步骤1:打开cmd,并使用cd命令切换到此目录 步骤2:输入如下指令 RunUAT.bat BuildPlugin -Plugin“路径1” -Package“…...

MySQL全局锁、表级锁、行锁、死锁、索引选择
文章目录 全局锁表级锁表锁元数据锁 MDL 如何安全的给小表添加字段1. 理解和监控长事务2. 使用NOWAIT和WAIT语法示例 3. 选择合适的时间窗口4. 分阶段执行5. 使用在线DDL工具 行锁死锁普通索引和唯一索引的选择索引基础业务场景分析性能考量实践建议索引及其选择机制索引选择错…...

深入解析算法效率核心:时间与空间复杂度概览及优化策略
算法复杂度,即时间复杂度与空间复杂度,衡量算法运行时资源消耗。时间复杂度反映执行时间随数据规模增长的关系,空间复杂度表明额外内存需求。优化策略,如选择合适数据结构、算法改进、循环展开等,对于提升程序效率、减…...
虚拟机装CentOS镜像
起先,是先安装一个VM虚拟机,再去官方网站之类的下载一些镜像,常见镜像有CentOS镜像,ubantu镜像,好像还有一个树莓还是什么的,软件这块,日新月异,更新太快,好久没碰&#…...
SpringCloud 集成consul,消费者报I/O error on GET request for...
创建消费者微服务,去调用生产者微服务的请求过程中,出现以下错误: 报错原因 因为在使用SpringCloudAlibaba中的Nacos框架时,自动整合了SpringCloud中的Ribbon框架中的负载均衡,因为微服务提供者有两个,在消…...

pytest的测试标记marks
引用打标的marks文档 Python的pytest框架(5)--测试标记(Markers)_pytest执行指定的marker-CSDN博客 https://www.cnblogs.com/pipile/p/12696226.html 给用例自定义打标签的代码示例 #coding:utf-8 import pytest pytest.mark.smoke def test_1():print("smoke的测试用…...
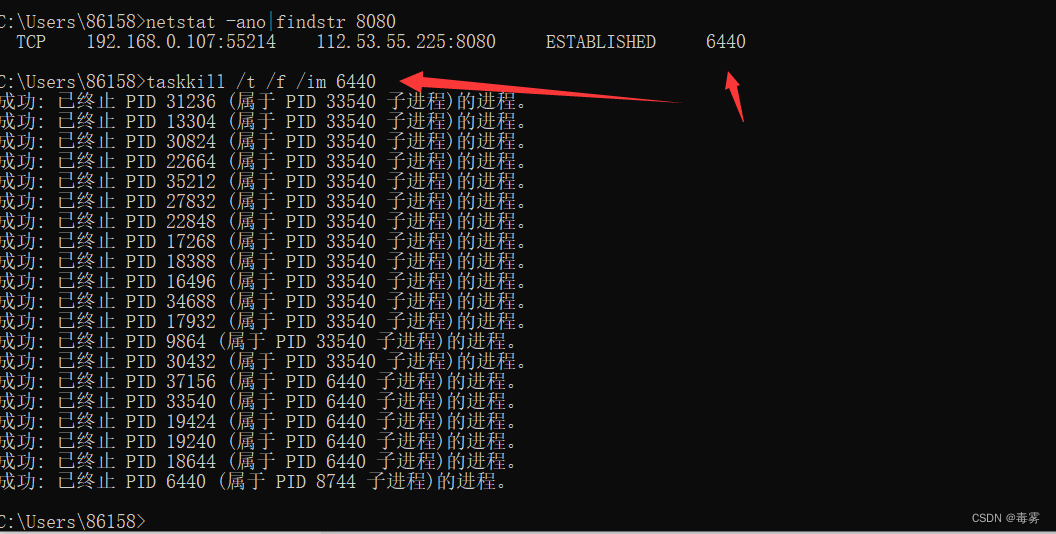
端口占用解决方法
1、查询端口 打开cmd命令提示符窗口,输入以下指令查询所有端口 netstat -ano //查询所有端口 netstat -ano|findstr 8080 //查询指定端口 2、杀死进程 taskkill /t /f /im 进程号(PID)...
Java毕设之基于springboot的医护人员排班系统
运行环境 开发语言:java 框架:springboot,vue JDK版本:JDK1.8 数据库:mysql5.7(推荐5.7,8.0也可以) 数据库工具:Navicat11 开发软件:idea/eclipse(推荐idea) 系统详细实现 医护类型管理 医护人员排班系统的系统管理员可以对医护类型添加修改删除以及…...
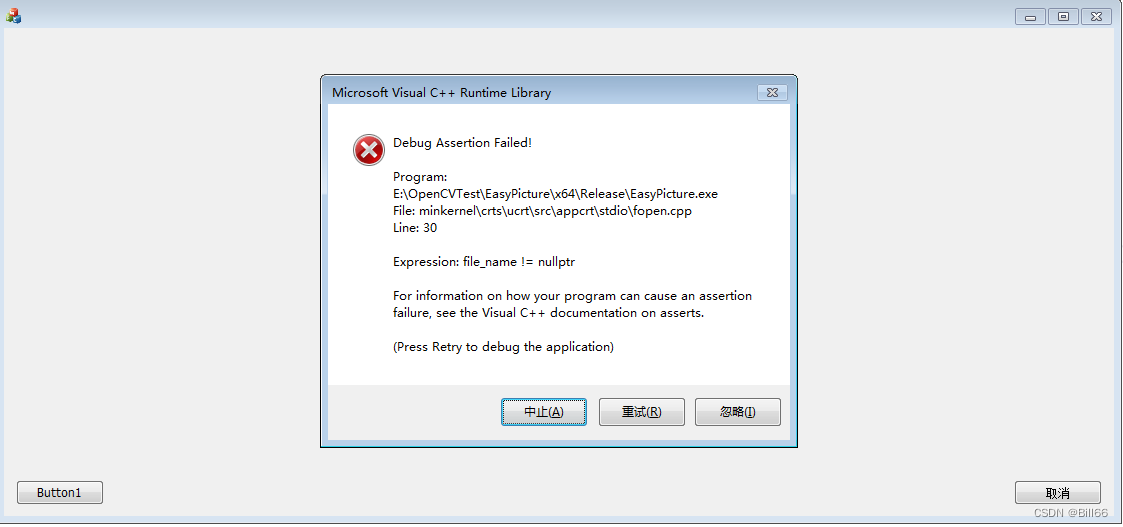
OpenCV4.8 VS2019 MFC编程出现的诡异现象
OpenCV4.8及OpenCV4.4 VS2019MFC编程在调用imred()函数时,debug X64试运行没问题。 release X64试运行时出现下面错误。 void CEasyPictureDlg::OnBnClickedOpen() {CFileDialog fdlg(TRUE, NULL, 0, OFN_HIDEREADONLY | OFN_OVERWRITEPROMP…...

游戏辅助 -- 三种分析角色坐标方法(CE、xdbg、龙龙遍历工具)
所用工具下载地址: https://pan.quark.cn/s/d54e7cdc55e6 在上次课程中,我们成功获取了人物对象的基址:[[[0xd75db8]1C]28],而人物血量的地址则是基址再加上偏移量278。 接下来,我们需要执行以下步骤来进一步操作&a…...
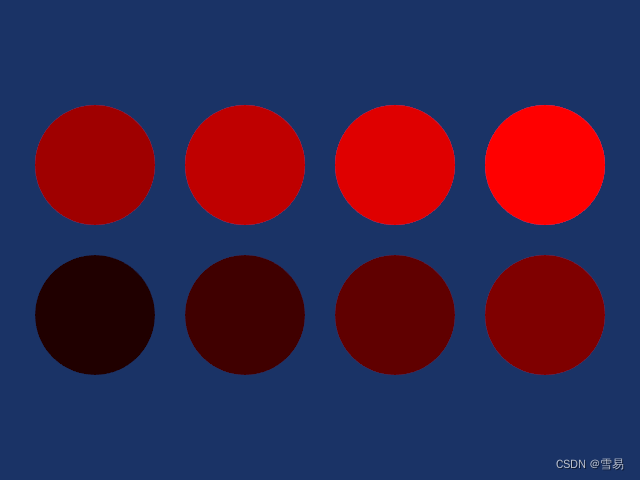
【VTKExamples::Rendering】第一期 TestAmbientSpheres(环境照明系数)
很高兴在雪易的CSDN遇见你 VTK技术爱好者 QQ:870202403 公众号:VTK忠粉 前言 本文分享VTK样例TestAmbientShperes,介绍环境照明系数对Actor颜色的影响,希望对各位小伙伴有所帮助! 感谢各位小伙伴的点赞+关注,小易会继续努力分享,一起进步! 你的点赞就是我的动…...

代码随想录leetcode200题之栈与队列
目录 1 介绍2 训练3 参考 1 介绍 本博客用来记录代码随想录leetcode200题中栈与队列部分的题目。 2 训练 题目1:232. 用栈实现队列 C代码如下, #include <stack>class MyQueue { private:stack<int> a;stack<int> b; //辅助栈 pu…...

使用Python实现2048小游戏
使用Python实现2048小游戏源码分享。实现效果如下所示。 实现效果图 游戏开始效果图 游戏结束效果图 部分源码截图 下载链接 基于如下的运行环境。运行需要安装tkinter /Library/Frameworks/Python.framework/Versions/3.7/bin/python/bin/python /Users/nihui/Documents/P…...

漏洞管理是如何在攻击者之前识别漏洞从而帮助人们阻止攻击的
漏洞管理 是主动查找、评估和缓解组织 IT 环境中的安全漏洞、弱点、差距、错误配置和错误的过程。该过程通常扩展到整个 IT 环境,包括网络、应用程序、系统、基础设施、软件和第三方服务等。鉴于所涉及的高成本,组织根本无法承受网络攻击和数据泄露。如果…...
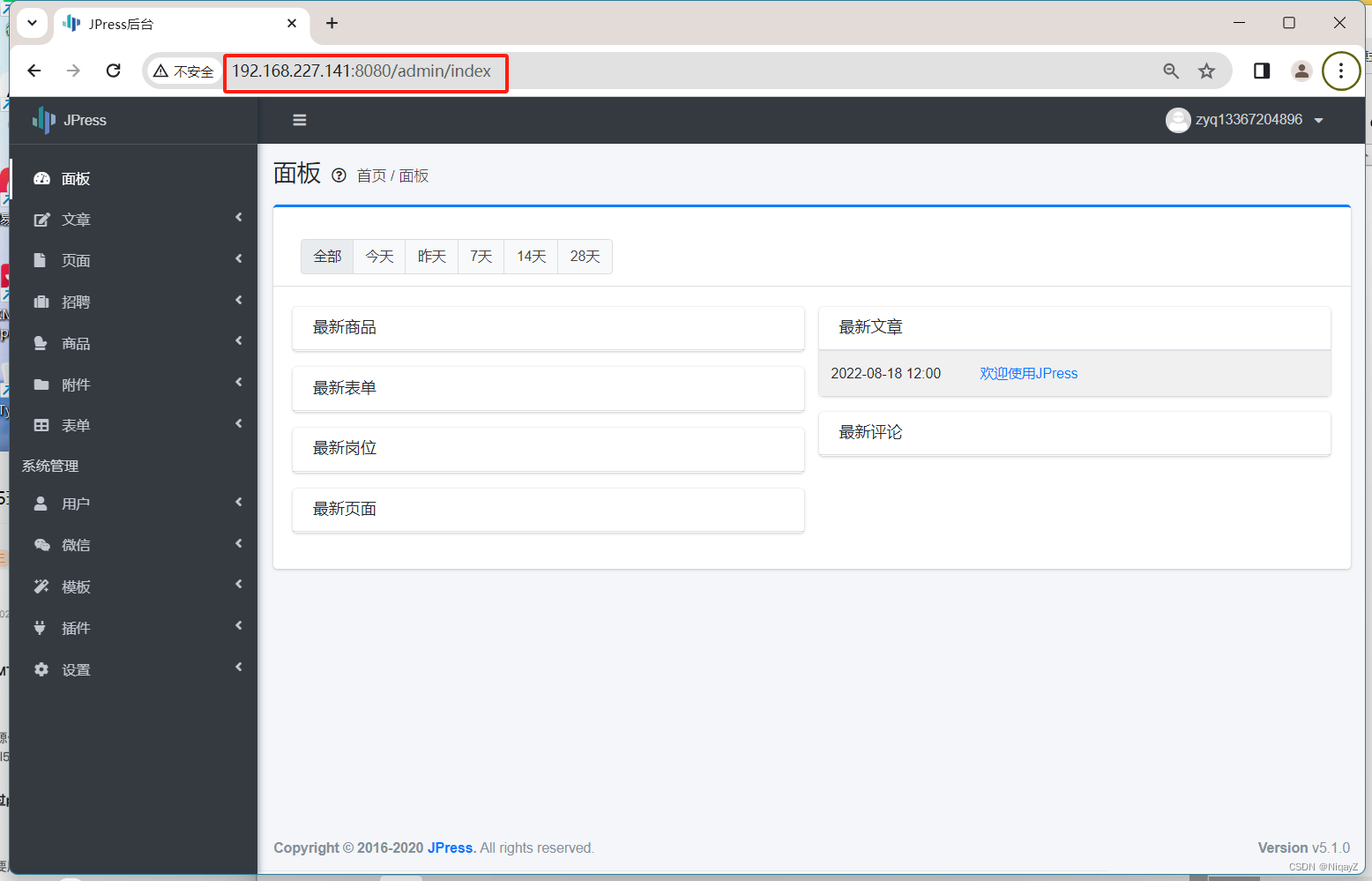
LNMT部署jpress
LNMT部署jpress 环境要求: MySQL版本5.6/5.7 tomcat版本9.0.65 源码安装MySQL5.7版 //源码安装MySQL5.7版1关闭防火墙 2创建mysql用户 3上传mysql5.7包(https://downloads.mysql.com/archives/get/p/23/file/mysql-5.7.30-linux-glibc2.12-x86_64.tar.g…...

汽车软件研发工具链丨怿星科技新产品重磅发布
“创新引领未来”聚焦汽车软件新基建,4月27日下午,怿星科技2024新产品发布会在北京圆满举行!智能汽车领域的企业代表、知名大企业负责人、投资机构代表、研究机构代表齐聚现场,线上直播同步开启,共同见证怿星科技从单点…...

.Net框架,除了EF还有很多很多......
文章目录 1. 引言2. Dapper2.1 概述与设计原理2.2 核心功能与代码示例基本查询多映射查询存储过程调用 2.3 性能优化原理2.4 适用场景 3. NHibernate3.1 概述与架构设计3.2 映射配置示例Fluent映射XML映射 3.3 查询示例HQL查询Criteria APILINQ提供程序 3.4 高级特性3.5 适用场…...

基于Flask实现的医疗保险欺诈识别监测模型
基于Flask实现的医疗保险欺诈识别监测模型 项目截图 项目简介 社会医疗保险是国家通过立法形式强制实施,由雇主和个人按一定比例缴纳保险费,建立社会医疗保险基金,支付雇员医疗费用的一种医疗保险制度, 它是促进社会文明和进步的…...
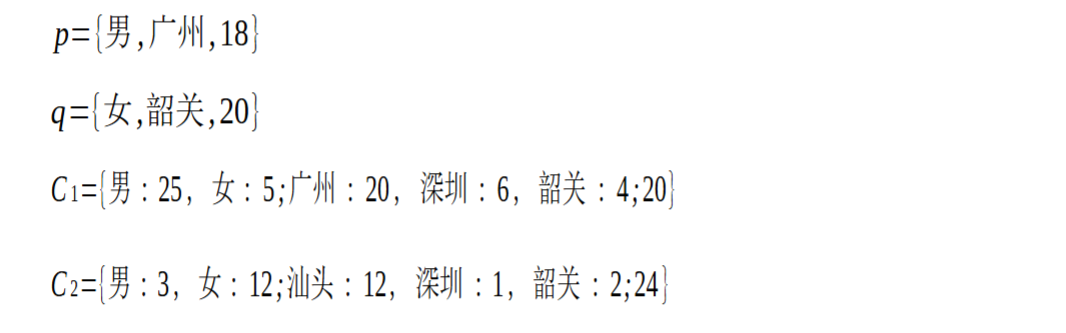
SCAU期末笔记 - 数据分析与数据挖掘题库解析
这门怎么题库答案不全啊日 来简单学一下子来 一、选择题(可多选) 将原始数据进行集成、变换、维度规约、数值规约是在以下哪个步骤的任务?(C) A. 频繁模式挖掘 B.分类和预测 C.数据预处理 D.数据流挖掘 A. 频繁模式挖掘:专注于发现数据中…...

页面渲染流程与性能优化
页面渲染流程与性能优化详解(完整版) 一、现代浏览器渲染流程(详细说明) 1. 构建DOM树 浏览器接收到HTML文档后,会逐步解析并构建DOM(Document Object Model)树。具体过程如下: (…...
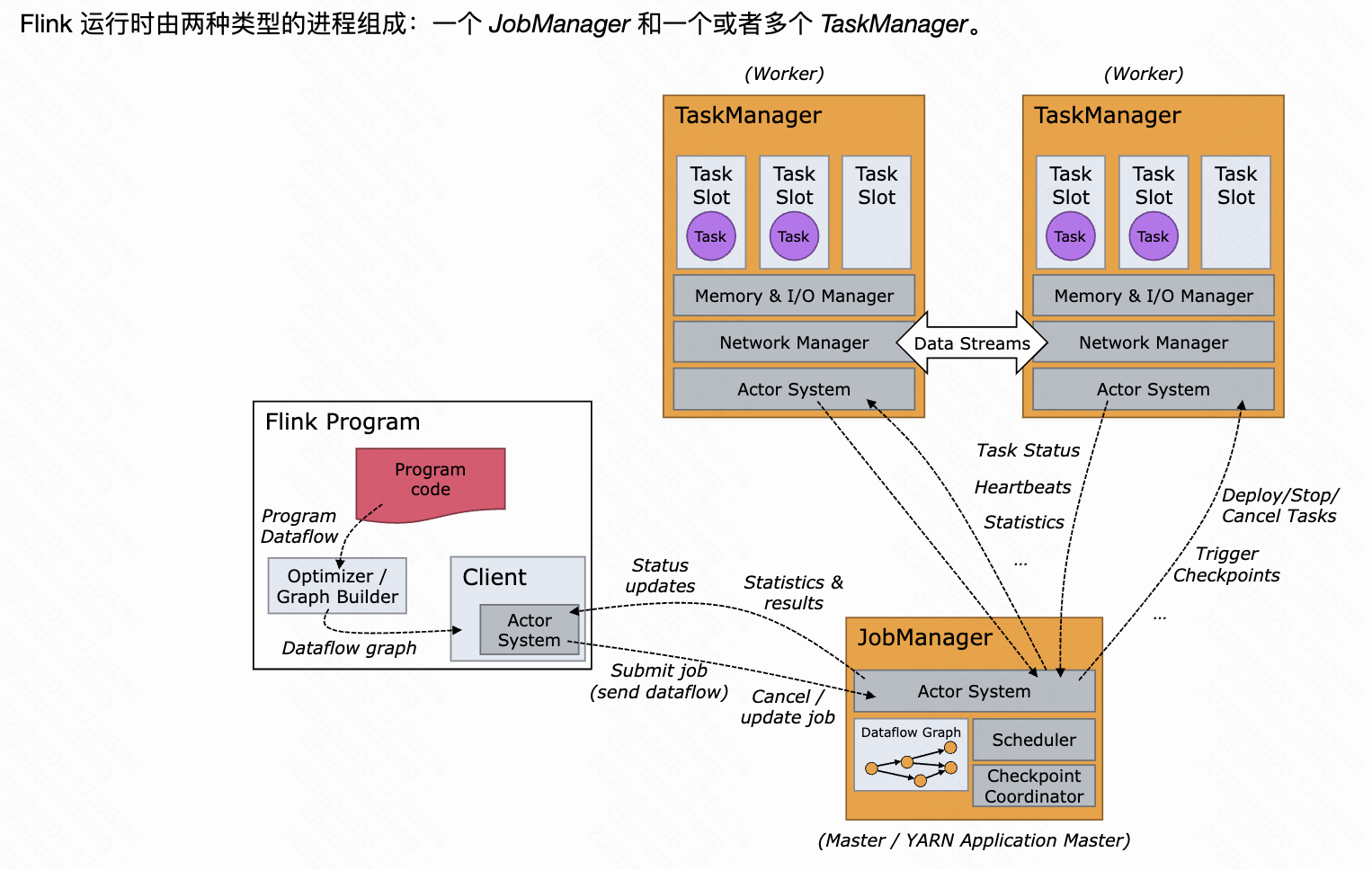
《基于Apache Flink的流处理》笔记
思维导图 1-3 章 4-7章 8-11 章 参考资料 源码: https://github.com/streaming-with-flink 博客 https://flink.apache.org/bloghttps://www.ververica.com/blog 聚会及会议 https://flink-forward.orghttps://www.meetup.com/topics/apache-flink https://n…...

【碎碎念】宝可梦 Mesh GO : 基于MESH网络的口袋妖怪 宝可梦GO游戏自组网系统
目录 游戏说明《宝可梦 Mesh GO》 —— 局域宝可梦探索Pokmon GO 类游戏核心理念应用场景Mesh 特性 宝可梦玩法融合设计游戏构想要素1. 地图探索(基于物理空间 广播范围)2. 野生宝可梦生成与广播3. 对战系统4. 道具与通信5. 延伸玩法 安全性设计 技术选…...

代理篇12|深入理解 Vite中的Proxy接口代理配置
在前端开发中,常常会遇到 跨域请求接口 的情况。为了解决这个问题,Vite 和 Webpack 都提供了 proxy 代理功能,用于将本地开发请求转发到后端服务器。 什么是代理(proxy)? 代理是在开发过程中,前端项目通过开发服务器,将指定的请求“转发”到真实的后端服务器,从而绕…...

华为OD机考-机房布局
import java.util.*;public class DemoTest5 {public static void main(String[] args) {Scanner in new Scanner(System.in);// 注意 hasNext 和 hasNextLine 的区别while (in.hasNextLine()) { // 注意 while 处理多个 caseSystem.out.println(solve(in.nextLine()));}}priv…...

【学习笔记】erase 删除顺序迭代器后迭代器失效的解决方案
目录 使用 erase 返回值继续迭代使用索引进行遍历 我们知道类似 vector 的顺序迭代器被删除后,迭代器会失效,因为顺序迭代器在内存中是连续存储的,元素删除后,后续元素会前移。 但一些场景中,我们又需要在执行删除操作…...

从“安全密码”到测试体系:Gitee Test 赋能关键领域软件质量保障
关键领域软件测试的"安全密码":Gitee Test如何破解行业痛点 在数字化浪潮席卷全球的今天,软件系统已成为国家关键领域的"神经中枢"。从国防军工到能源电力,从金融交易到交通管控,这些关乎国计民生的关键领域…...