ROS 摄像头的使用
参考:
youtube@Articulated Robotics
作者@Josh Newans博客
建议:
这个只是我的看法,强烈建议看原视频或博客
png:无损压缩
jpeg:有损压缩
-
Driver Node
负责连接硬件设备,读取摄像头数据"image_raw"(这里的raw指的是未压缩的图片,而不是raw格式的图片),并发布到指定话题"sensor_msgs/Image",
如果是需要压缩的图像数据"image_raw/compressed",则发布到"sensor_msgs/CompressdImage",
二者通过 image_transport library/nodes可以互相转换
-
坐标系
-
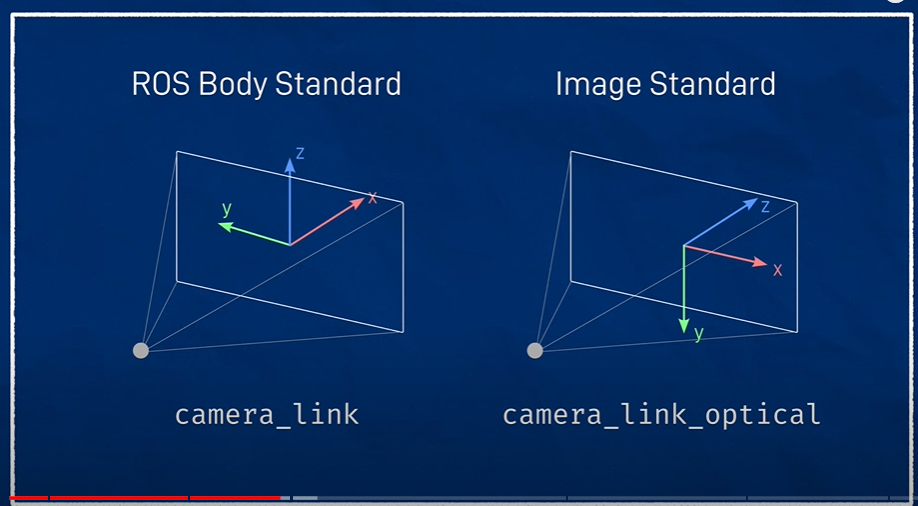
在ROS中,机身的坐标系为左图,一般为camera_link,而图片坐标系则为camera_link_optical,两个坐标系的x,y,z轴是不同的。
-
在实际使用时,urdf?创建的是两帧(frame),实际数据是一样的,但是图片坐标系是机身坐标系翻转(rotate)得到的。
-
camera_link_optical需要在header中声明这一帧是optical frame。
-
-
修改 .xacro文件
这里添加了 翻转
<joint name="camera_optical_joint" type="fixed"><!--翻转添加的位置--><origin xyz="0 0 0" rpy="${-pi/2} 0 ${-pi/2}" /><parent link="camera_link" /><child link="camera_link_optical" /> </joint><link name="camera_link_optical"></link><!--设置相机的参数--> <camera><!--fov与实际相机一致--><horizontal_fov>1.089</horizontal_fov><!--设置图片格式--><image><format>R8G8B8</format><width>640</width><height>480</height></image><!--设置相机范围 0.05m~8m --><clip><near>0.05</near><far>8.0</far></clip> </camera><!--修改插件(驱动)--> <plugin name="camera_controller" filename="libgazebo_ros_camera.so"><frame_name>camera_link_optical</frame_name> </plugin>
相关文章:
ROS 摄像头的使用
参考: youtubeArticulated Robotics 作者Josh Newans博客 建议: 这个只是我的看法,强烈建议看原视频或博客 png:无损压缩 jpeg:有损压缩 Driver Node 负责连接硬件设备,读取摄像头数据"ima…...

VR全景云展厅,实现7*24小时的线上宣传能力!
数字化时代,虚拟现实技术的应用越来越广泛,其中VR全景云展厅是一种新兴的展示方式,具有独特的展示优势。随着VR技术的不断发展,越来越多的企业、机构和个人开始使用VR全景云展厅来展示他们的产品和服务。一、展厅营销痛点1、实地到…...
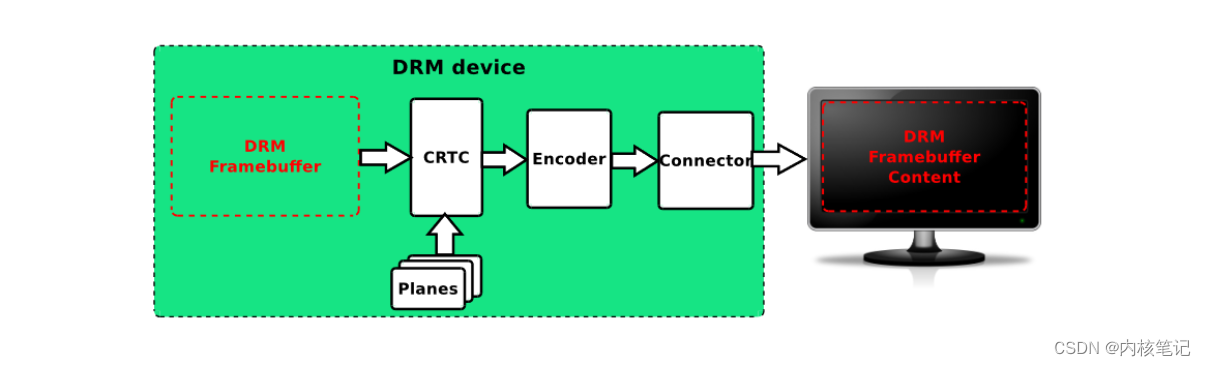
RK3568平台开发系列讲解(显示篇) DRM显示系统组成分析
🚀返回专栏总目录 文章目录 一、DRM Framebuffer二、CRTC三、Planes四、Encoder五、Connector沉淀、分享、成长,让自己和他人都能有所收获!😄 📢让我们分析一下绿框中的五个部件,以及他们的联动。 一、DRM Framebuffer 与 framebuffer一样,是一片存放图像的内存区域,…...

WPF DataGrid控件的使用 使用列模板来进行数据格式的美化
<Grid><Grid.RowDefinitions><RowDefinition Height"0.1*" /><RowDefinition /></Grid.RowDefinitions><Button Content"刷新"FontSize"25"Command"{Binding ExecuteRefreshCommand}" /><Dat…...
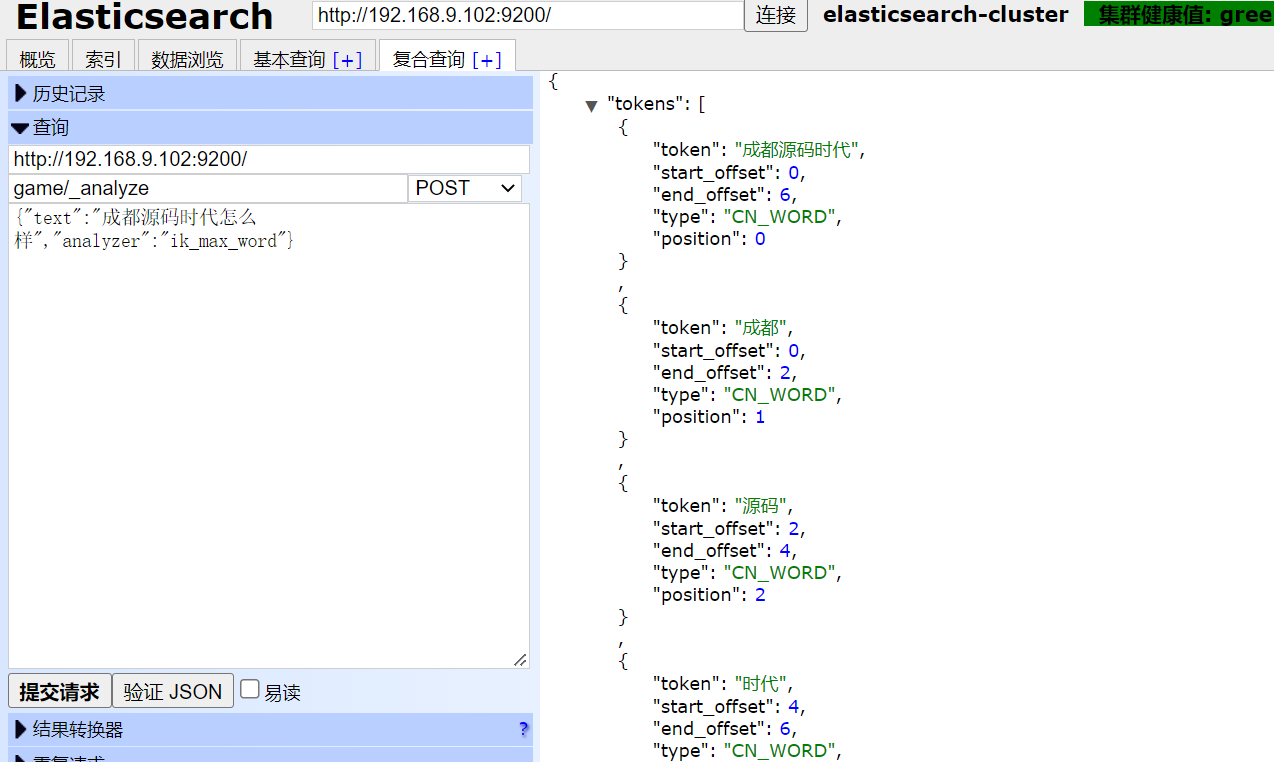
elasticsearch自定义企业词典
我们中文分词用的是ik,但是ik只是对基本的中文词进行了分词,而对于企业或者人名没有进行分词。比如,我搜索中国平安,那么ik只能分成中国、平安如果这样,这肯定是不行滴!接下来,俺就教你…...

【AcWing】学了一坤时才明白的一道题
🎆音乐分享 (点击链接可以听哦) The Right Path - Thomas Greenberg 这道题小吉花了一坤时才弄明白,虽然花的时间有点长 但是至少是明白了 😎😎😎😎😎😎 …...

ES6的export和import
ES6中的模块加载ES6 模块是编译时加载,编译时就能确定模块的依赖关系,以及输入和输出的变量,相比于CommonJS 和 AMD 模块都只能在运行时确定输入输出变量的加载效率要高。严格模式ES6 的模块自动采用严格模式,不管你有没有在模块头…...
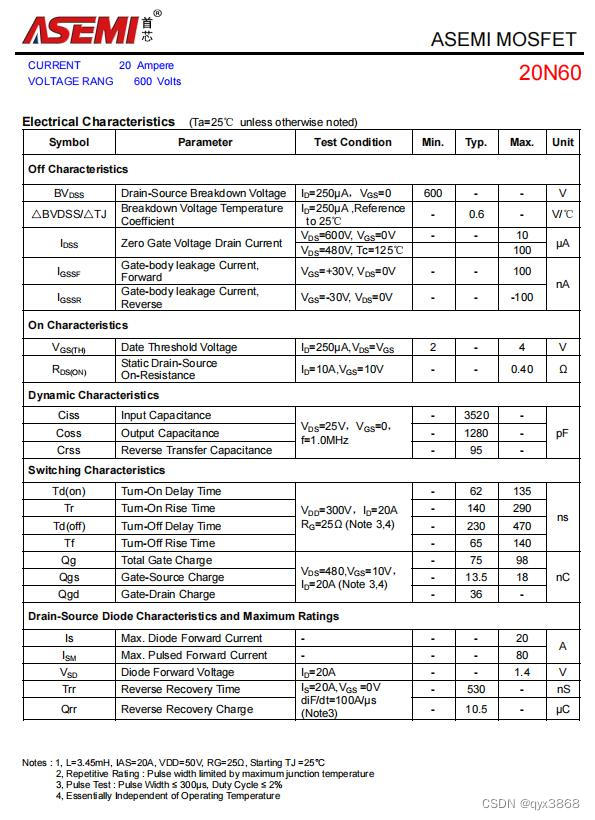
ASEMI高压MOS管20N60参数,20N60尺寸,20N60体积
编辑-Z ASEMI高压MOS管20N60参数: 型号:20N60 漏极-源极电压(VDS):600V 栅源电压(VGS):30V 漏极电流(ID):20A 功耗(PDÿ…...
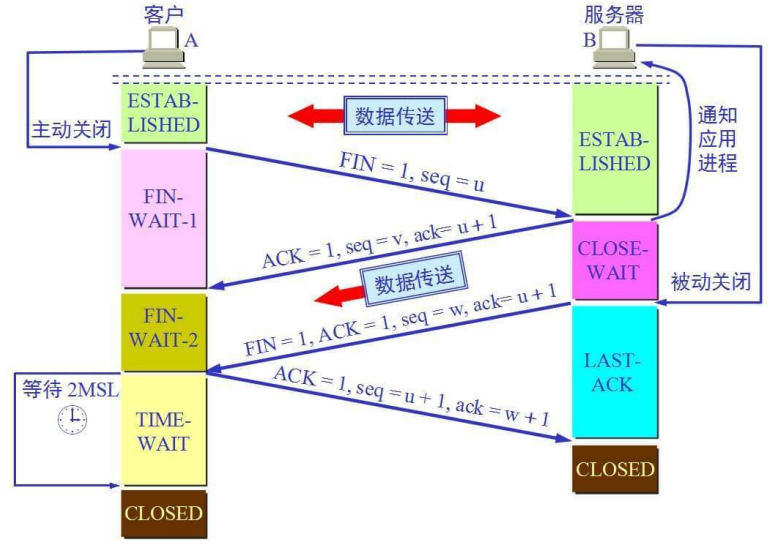
【备战面试】TCP的三次握手与四次挥手
本篇总结的是计算机网络知识相关的面试题,后续也会更新其他相关内容 文章目录1、TCP头部结构2、三次握手3、四次挥手4、为什么TCP连接的时候是三次?两次是否可以?5、为什么TCP连接的时候是三次,关闭的时候却是四次?6、…...
【模板进阶】
目录 1. 非类型模板参数 2. 模板的特化 2.1 概念 2.2 函数模板特化 2.3 类模板特化 2.3.1 全特化 3 模板分离编译 3.1 什么是分离编译 3.2 模板的分离编译 4. 模板总结 有需要的老哥可以先看看模板的介绍:http://t.csdn.cn/2TkUYhttp://t.csdn.cn/2TkUY 1. …...

Tech Talk | 电致变色技术带来的智能AR体验
2023年2月27日,小米在2023MWC世界移动通信大会上,正式发布了小米无线AR眼镜探索版。这款产品搭载了创新的数控电致变色镜片,能适应不同光环境,遮光模式可以在观影时更沉浸,通透模式又能让AR虚实结合的体验更生动。“ 本…...
ACWING蓝桥杯每日一题python(持续更新
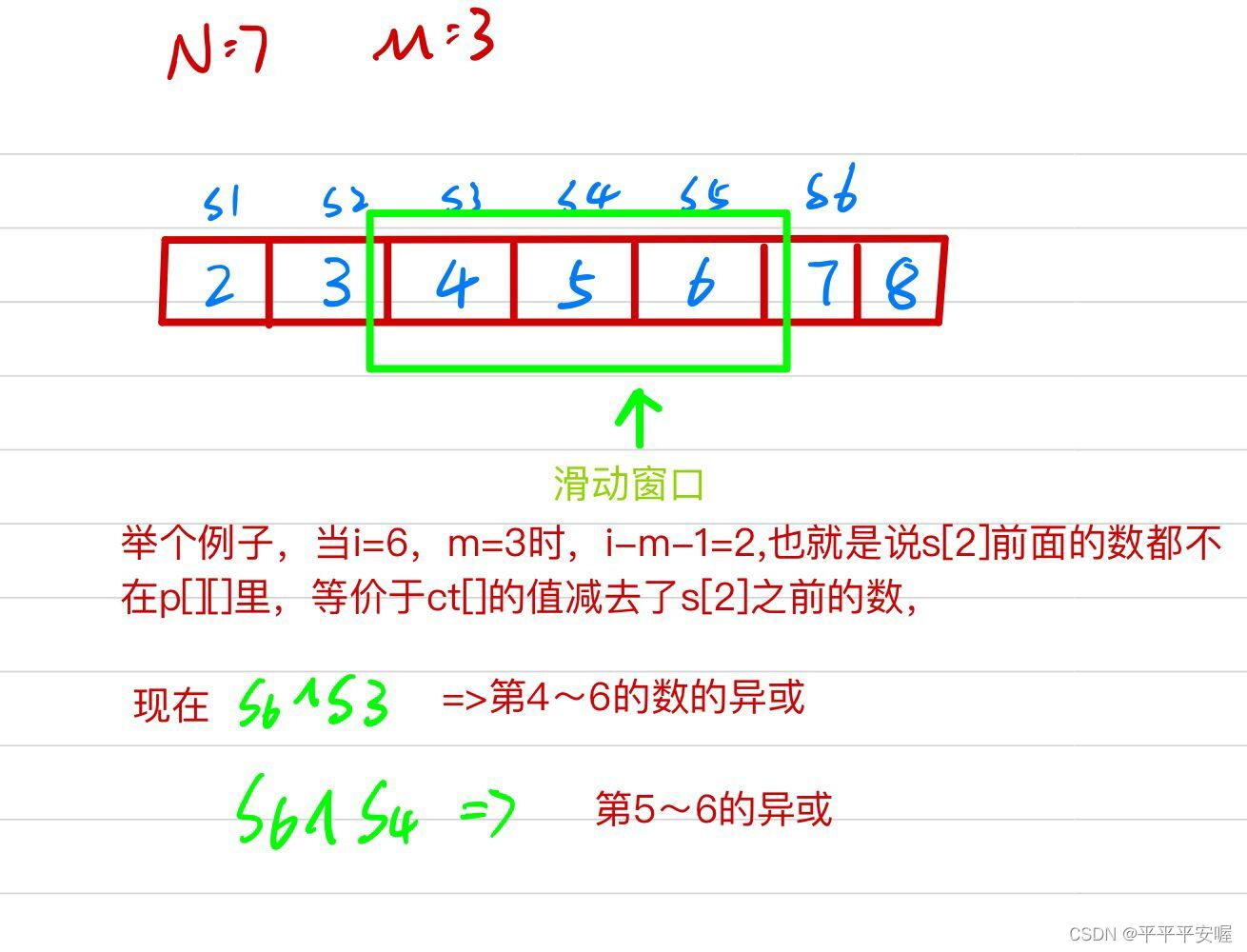
ACWing蓝桥杯每日一题 一直没时间去总结算法,终于有空可以总结一下刷的acwing了,因为没时间所以最近只刷了ACWING的蓝桥杯每日一题。。。真是该死 1.截断数组 首先我们要知道,如果sum(a)不能被3整除或者len(a) < 3 ,那么他肯…...

【Linux】进程状态(阻塞、挂起、僵尸进程)
文章目录1 阻塞与挂起1.1 阻塞1.2 挂起2 进程状态前言: 当我们在Windows下双击运行一个程序,或是在Linux下通过 ./ 加载运行一个程序,是否就代表对应的进程就一直处在运行状态呢?其实不然,一个进程有许多不同的状态。当…...

规约第二章
文章目录有限域的定义Definition of Finite Field单位元运算举例素数域群阿贝尔群阿贝尔循环群循环子群阿贝尔循环群且阶是素数的有限域的定义Definition of Finite Field 单位元 这里一般只需要记住2个0,1 。0是加法的单位元,1是乘法的单位元。以及逆…...
2019年MathorCup数学建模C题汽配件制造业中的生产排程问题解题全过程文档及程序
2019年第九届MathorCup高校数学建模挑战赛 C题 汽配件制造业中的生产排程问题 原题再现: 整体求解过程概述(摘要) 随着市场竞争日趋激烈,企业开始更加注重低费高效,因此生产排程问题成为众多制造企业关注的热点之一。其中,制造行…...
ARM uboot 的移植3 -从 uboot 官方标准uboot开始移植
一、选择合适的官方原版 uboot 1、官方原版 uboot 的版本 (1) 版本号。刚开始是 1.3.4 样式,后来变成 2009.08 样式。 (2) 新版和旧版的差别。uboot 的架构很早就定下来了,然后里面普遍公用的东西(common 目录下、drivers 目录下、fs 目录…...
【独家】)
华为OD机试 - 快递货车(C 语言解题)【独家】
最近更新的博客 华为od 2023 | 什么是华为od,od 薪资待遇,od机试题清单华为OD机试真题大全,用 Python 解华为机试题 | 机试宝典【华为OD机试】全流程解析+经验分享,题型分享,防作弊指南)华为od机试,独家整理 已参加机试人员的实战技巧文章目录 使用说明本期题目:快递货车…...
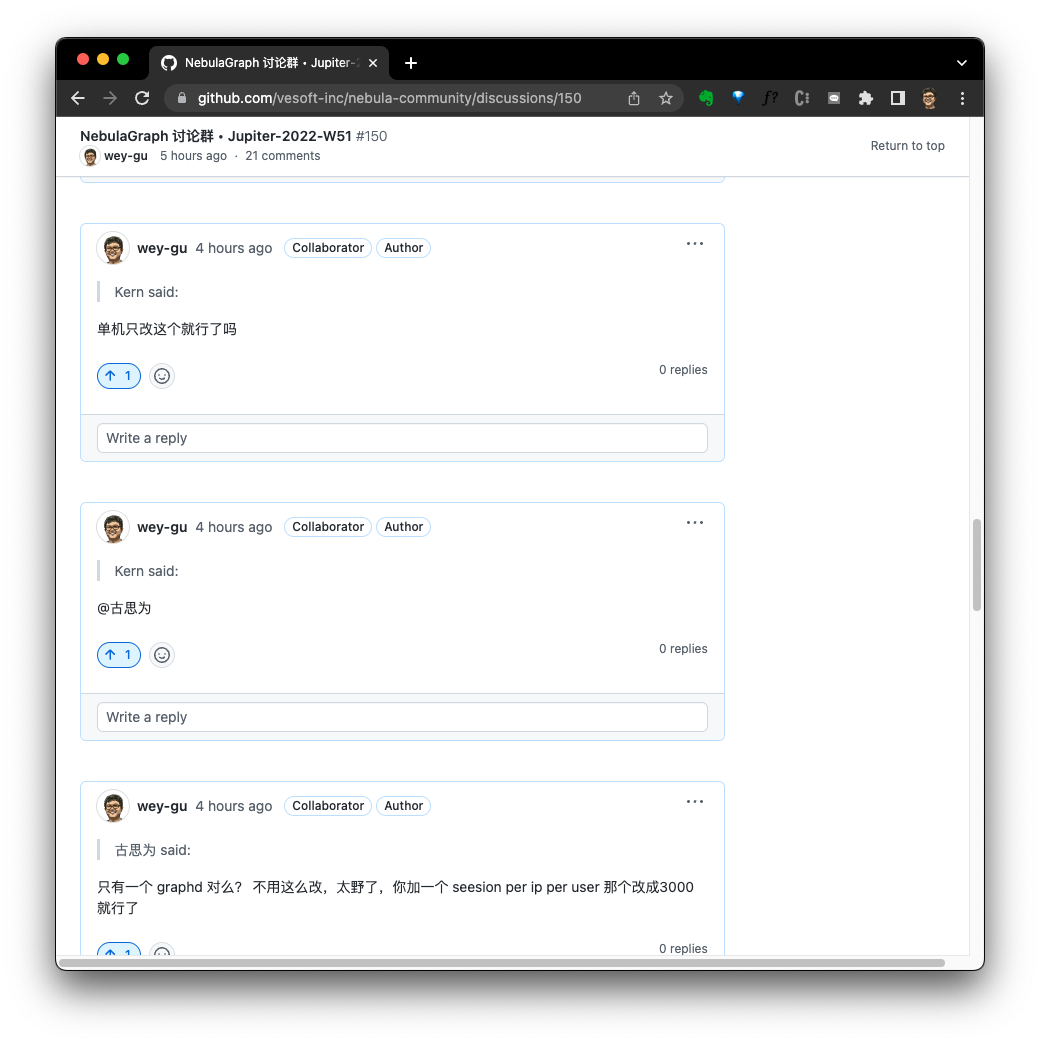
连接微信群、Slack 和 GitHub:社区开放沟通的基础设施搭建
NebulaGraph 社区如何构建工具让 Slack、WeChat 中宝贵的群聊讨论同步到公共领域。 要开放,不要封闭 在开源社区中,开放的一个重要意义是社区内的沟通、讨论应该是透明、包容并且方便所有成员访问的。这意味着社区中的任何人都应该能够参与讨论和决策过…...
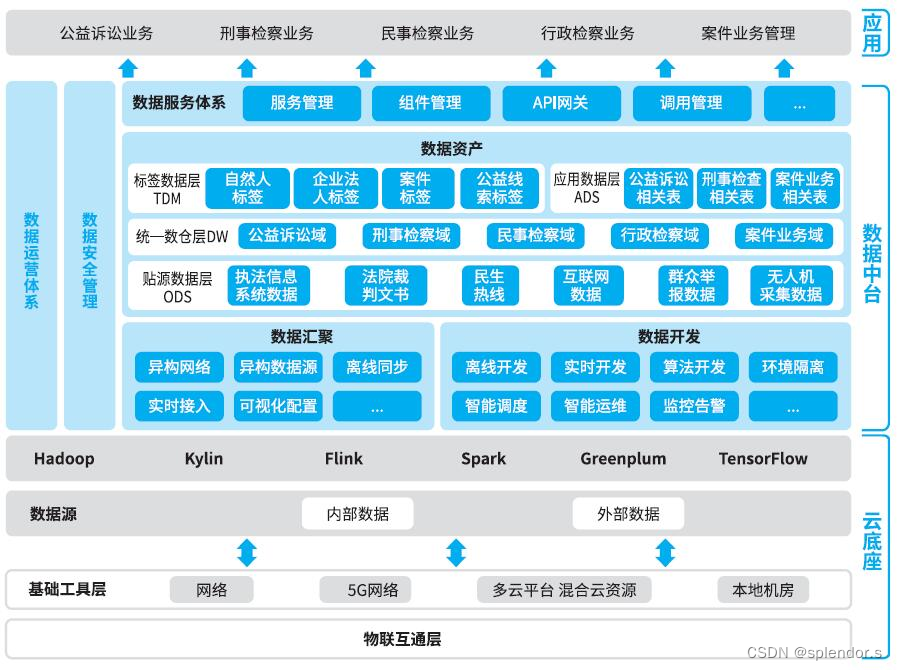
数据中台架构体系理解
目前,大部分企业更倾向于数据集中采集、存储,并应用分层建设。这种方式一方面有利于应用系统的快速部署,另一方面也保证了数据的集中管理与运营,体现数据的资产、资源属性。 数据中台的出现弥补了数据开发和应用开发之间由于开发…...

高并发性能指标:QPS、TPS、RT、并发数、吞吐量
QPS(每秒查询) QPS:Queries Per Second意思是“每秒查询率”,一台服务器每秒能够相应的查询次数,是对一个特定的查询服务器在规定时间内所处理流量多少的衡量标准 互联网中,作为域名系统服务器的机器的性…...

Python爬虫实战:研究MechanicalSoup库相关技术
一、MechanicalSoup 库概述 1.1 库简介 MechanicalSoup 是一个 Python 库,专为自动化交互网站而设计。它结合了 requests 的 HTTP 请求能力和 BeautifulSoup 的 HTML 解析能力,提供了直观的 API,让我们可以像人类用户一样浏览网页、填写表单和提交请求。 1.2 主要功能特点…...

铭豹扩展坞 USB转网口 突然无法识别解决方法
当 USB 转网口扩展坞在一台笔记本上无法识别,但在其他电脑上正常工作时,问题通常出在笔记本自身或其与扩展坞的兼容性上。以下是系统化的定位思路和排查步骤,帮助你快速找到故障原因: 背景: 一个M-pard(铭豹)扩展坞的网卡突然无法识别了,扩展出来的三个USB接口正常。…...

[2025CVPR]DeepVideo-R1:基于难度感知回归GRPO的视频强化微调框架详解
突破视频大语言模型推理瓶颈,在多个视频基准上实现SOTA性能 一、核心问题与创新亮点 1.1 GRPO在视频任务中的两大挑战 安全措施依赖问题 GRPO使用min和clip函数限制策略更新幅度,导致: 梯度抑制:当新旧策略差异过大时梯度消失收敛困难:策略无法充分优化# 传统GRPO的梯…...

PPT|230页| 制造集团企业供应链端到端的数字化解决方案:从需求到结算的全链路业务闭环构建
制造业采购供应链管理是企业运营的核心环节,供应链协同管理在供应链上下游企业之间建立紧密的合作关系,通过信息共享、资源整合、业务协同等方式,实现供应链的全面管理和优化,提高供应链的效率和透明度,降低供应链的成…...
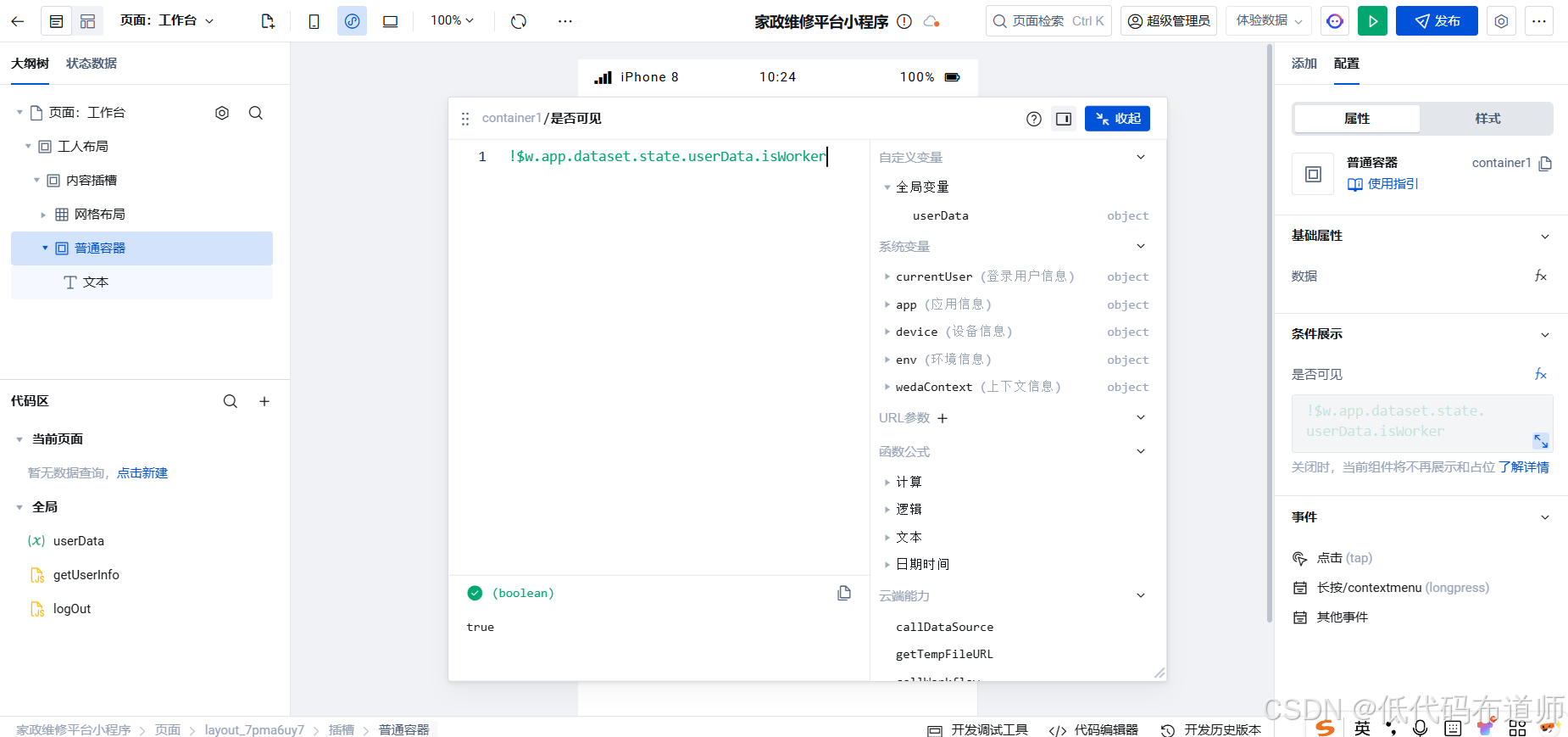
家政维修平台实战20:权限设计
目录 1 获取工人信息2 搭建工人入口3 权限判断总结 目前我们已经搭建好了基础的用户体系,主要是分成几个表,用户表我们是记录用户的基础信息,包括手机、昵称、头像。而工人和员工各有各的表。那么就有一个问题,不同的角色…...

[10-3]软件I2C读写MPU6050 江协科技学习笔记(16个知识点)
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16...

Rust 异步编程
Rust 异步编程 引言 Rust 是一种系统编程语言,以其高性能、安全性以及零成本抽象而著称。在多核处理器成为主流的今天,异步编程成为了一种提高应用性能、优化资源利用的有效手段。本文将深入探讨 Rust 异步编程的核心概念、常用库以及最佳实践。 异步编程基础 什么是异步…...

成都鼎讯硬核科技!雷达目标与干扰模拟器,以卓越性能制胜电磁频谱战
在现代战争中,电磁频谱已成为继陆、海、空、天之后的 “第五维战场”,雷达作为电磁频谱领域的关键装备,其干扰与抗干扰能力的较量,直接影响着战争的胜负走向。由成都鼎讯科技匠心打造的雷达目标与干扰模拟器,凭借数字射…...
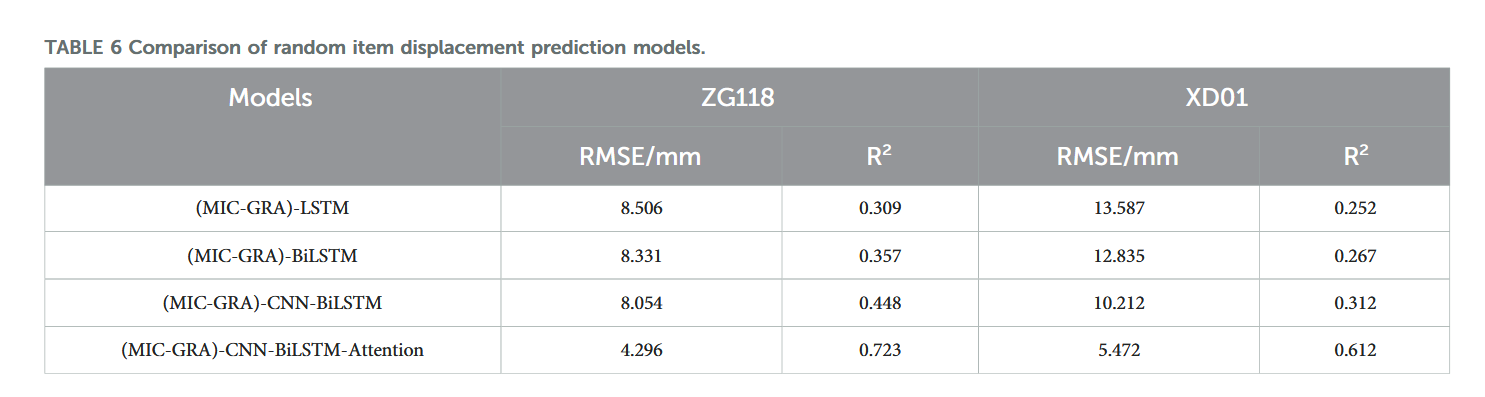
【论文阅读28】-CNN-BiLSTM-Attention-(2024)
本文把滑坡位移序列拆开、筛优质因子,再用 CNN-BiLSTM-Attention 来动态预测每个子序列,最后重构出总位移,预测效果超越传统模型。 文章目录 1 引言2 方法2.1 位移时间序列加性模型2.2 变分模态分解 (VMD) 具体步骤2.3.1 样本熵(S…...

docker 部署发现spring.profiles.active 问题
报错: org.springframework.boot.context.config.InvalidConfigDataPropertyException: Property spring.profiles.active imported from location class path resource [application-test.yml] is invalid in a profile specific resource [origin: class path re…...