【C++进阶】四、AVL树(二)
目录
前言
一、AVL树的概念
二、AVL树节点的定义
三、AVL树的插入
四、AVL树的旋转
4.1 左单旋
4.2 右单旋
4.3 左右双旋
4.4 右左双旋
五、AVL树的验证
六、AVL树的性能
七、完整代码
前言
前面对 map/multimap/set/multiset 进行了简单的介绍,在其文档介绍中发现,这几个容器有个共同点是:其底层都是按照红黑树(二叉搜索树)来实现的,但是二叉搜索树有其自身的缺陷,假如往树中插入的元素有序或者接近有序,二叉搜索树就会退化成单支树,时间复杂度会退化成O(N),因此 map、set 等关联式容器的底层结构是对二叉树进行了平衡处理,即采用平衡树(AVL树)来实现
一、AVL树的概念
二叉搜索树虽可以缩短查找的效率,但如果数据有序或接近有序二叉搜索树将退化为单支树,查找元素相当于在顺序表中搜索元素,效率低下。
因此,两位俄罗斯的数学家G.M.Adelson-Velskii和 E.M.Landis 在1962年发明了一种解决上述问题的方法:
当向二叉搜索树中插入新结点后,如果能保证每个结点的左右子树高度之差的绝对值不超过1(需要对树中的结点进行调整),即可降低树的高度,从而减少平均搜索长度,这棵树叫 AVL树
一棵AVL树或者是空树,或者是具有以下性质的二叉搜索树:
- 它的左右子树都是AVL树
- 左右子树高度之差(简称平衡因子)的绝对值不超过1(-1/0/1)
- 如果一棵二叉搜索树是高度平衡的,它就是AVL树,如果它有n个结点,其高度可保持在O(logN),搜索时间复杂度O(logN)

注意:树中每个结点左右子树高度之差的绝对值不超过1,AVL树接近于满二叉树,满二叉树的每个结点左右子树高度之差均为0
二、AVL树节点的定义
AVL树这里直接使用键值对,即 KV模型,使用键值对是为了方便后面实现 set 和 map。AVL树节点的定义增加了一个指向父节点的指针,变成了三叉链结构,并且每个节点都增加了一个平衡因子(一般是右子树高度 - 左子树高度),平衡因子的初始化设置为0即可
//K:key V:Value
template<class K, class V>
struct AVLTreeNode
{//构造函数AVLTreeNode(const pair<K, V>& kv):_kv(kv),_left(nullptr),_right(nullptr), _parent(nullptr),_bf(0){}//成员变量pair<K, V> _kv;AVLTreeNode<K, V>* _left;AVLTreeNode<K, V>* _right;AVLTreeNode<K, V>* _parent;int _bf; // balance factor 平衡因子
};template<class K, class V>
class AVLTree
{typedef AVLTreeNode<K, V> Node;
public:private:Node* _root = nullptr;
};
三、AVL树的插入
AVL树就是在二叉搜索树的基础上引入了平衡因子,因此AVL树也可以看成是二叉搜索树。那么AVL树的插入过程可以分为两步:
- 按照二叉搜索树的方式插入新节点
- 调整节点的平衡因子
接下来按两个步骤进行解释:
(1)进行插入节点
因为AVL树本身就是一棵二叉搜索树,因此寻找结点的插入位置是非常简单的,按照二叉搜索树的插入规则:
- 待插入结点的key值比当前结点小就插入到该结点的左子树
- 待插入结点的key值比当前结点大就插入到该结点的右子树
- 待插入结点的key值与当前结点的 key 值相等就插入失败
(2)更新平衡因子
插入完成后需要更新平衡因子 ,需要更新平衡因子的判断条件是:是取决于该结点的左右子树的高度是否发生了变化
所以我们插入结点后需要倒着往上更新平衡因子,更新规则如下:
- 新增结点在parent的右边,parent的平衡因子 ++
- 新增结点在parent的左边,parent的平衡因子 --
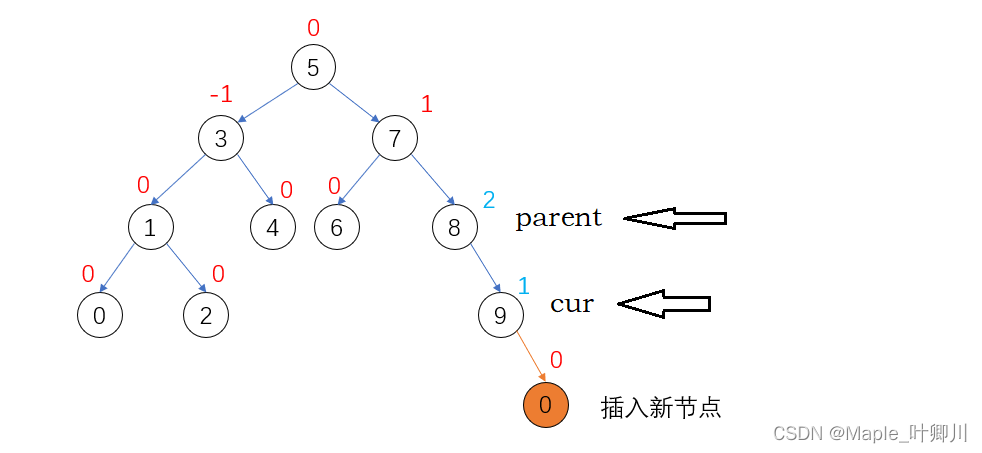
比如:下图进行插入一个新节点,祖先节点的平衡因子都可能发生变化

所以,每更新完一个结点的平衡因子后,都需要进行以下判断:
- 如果 parent 的平衡因子等于-1或者1,表明还需要继续往上更新平衡因子
- 如果 parent 的平衡因子等于0,表明无需继续往上更新平衡因子了
- 如果parent的平衡因子等于 -2 或者 2,表明此时以 parent 结点为根结点的子树已经不平衡了,需要进行旋转处理
注: parent 不是这三种情况,插入有问题
平衡因子分析如下:
parent的平衡因子更新后为: -1或1 只有0经过 -- 或 ++ 操作后会变成 -1/1,说明新结点的插入使得 parent的左子树或右子树增高了,即改变了以parent为根结点的子树的高度,从而会影响parent的父结点的平衡因子,因此需要继续往上更新平衡因子 0 只有-1/1经过 ++ 或 -- 操作后会变成0,说明新结点插入到了parent左右子树当中高度较矮的一棵子树,插入后使得 parent 左右子树的高度相等了,此操作并没有改变以parent为根结点的子树的高度,从而不会影响parent 的父结点的平衡因子,因此无需继续往上更新平衡因子 -2或2 此时parent结点的左右子树高度之差的绝对值已经超过1了,不满足AVL树的要求,因此需要进行旋转处理
当parent的平衡因子为 -2或2,需要旋转处理,旋转处理又分四种情况:
- 当parent的平衡因子为-2,cur的平衡因子为-1时,进行右单旋
- 当parent的平衡因子为2,cur的平衡因子为1时,进行左单旋
- 当parent的平衡因子为-2,cur的平衡因子为1时,进行左右双旋
- 当parent的平衡因子为2,cur的平衡因子为-1时,进行右左双旋
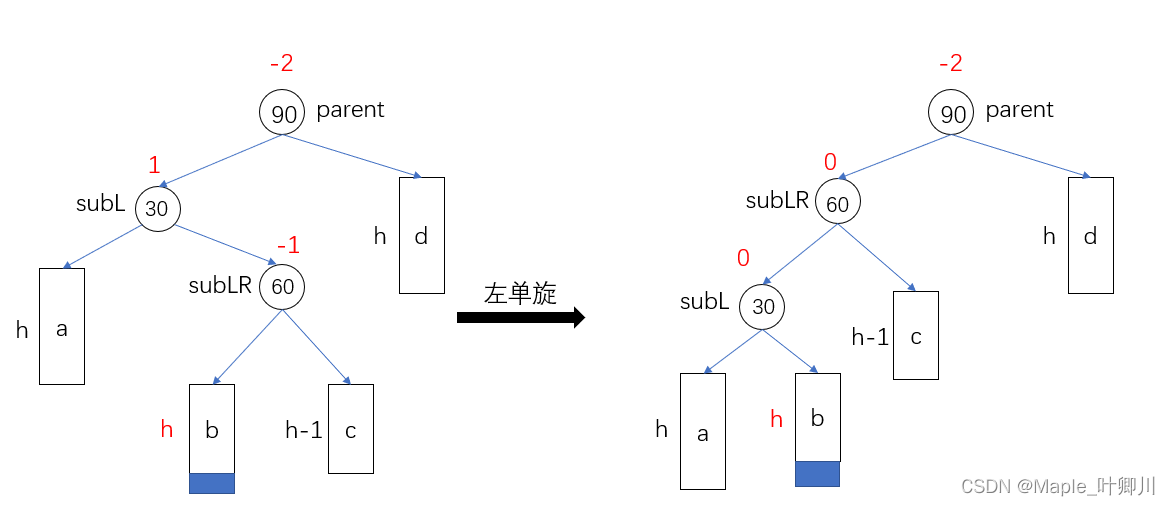
比如第二种情况,这种情况就需要进行左单旋
什么是旋转,下面解释
以上分析的代码如下:
bool Insert(const pair<K, V>& kv)
{//节点为空,新建根节点,默认为平衡二叉树if (_root == nullptr){_root = new Node(kv);return true;}//节点为不空Node* parent = nullptr;//用于记录上一个节点Node* cur = _root;//寻找合适的位置进行插入while (cur){if (cur->_kv.first > kv.first){parent = cur;cur = cur->_left;}else if (cur->_kv.first < kv.first){parent = cur;cur = cur->_right;}else//cur->kv.first = kv.first要插入值已经存在,插入失败{return false;}}cur = new Node(kv);//插入if (parent->_kv.first < kv.first)//插入到parent左边{parent->_right = cur;cur->_parent = parent;}else//插入到parent右边{parent->_left = cur;cur->_parent = parent;}//进行更新平衡因子while (parent)//parent 为空,说明已经更新到根节点{if (parent->_left == cur)//新节点插入在parent左边{parent->_bf--;}else//新节点插入在parent右边{parent->_bf++;}//继续更新平衡因子的依据:根据子树的高度是否变化// (1)parent->_bf == 0 说明之前parent->_bf是 1 或者 -1,说明之前parent一边高一边低,// 这次插入填上矮的那边,parent所在子树高度不变,不需要继续往上更新// (2)parent->_bf == 1 或 -1 说明之前是 parent->_bf == 0,两边一样高,现在插入一边更高了,// parent所在子树高度变了,继续往上更新// (3)parent->_bf == 2 或 -2,说明之前 parent->_bf == 1 或者 -1,现在插入严重不平衡,违反规则// 需要就地处理 -- 旋转if (parent->_bf == 0)//第一种情况{break;}else if (parent->_bf == 1 || parent->_bf == -1)//第二种情况{cur = parent;parent = parent->_parent;}else if (parent->_bf == 2 || parent->_bf == -2)//第三种情况{// 旋转:// 1、让这颗子树左右高度不超过1// 2、旋转过程中继续保持他是搜索树// 3、更新调整孩子节点的平衡因子// 4、让这颗子树的高度跟插入前保持一致//旋转if (parent->_bf == 2 && cur->_bf == 1){RotateL(parent);//左单旋}else if (parent->_bf == -2 && cur->_bf == -1){RotateR(parent);//右单旋}else if (parent->_bf == -2 && cur->_bf == 1){RotateLR(parent);//双旋转:左单旋后右单旋}else if (parent->_bf == 2 && cur->_bf == -1){RotateRL(parent);//双旋转:右单旋后左单旋}break;}else//不是上面三种情况,插入有问题{assert(false);}}return true;
}四、AVL树的旋转
4.1 左单旋
左单旋的步骤如下:
- 让 subR 的左子树作为parent的右子树
- 让parent作为subR的左子树
- 让subR作为整个子树的根
- 更新平衡因子
以下图片为了方便演示,用的都是抽象图,即代表无数种情况
旋转示意图如下:

旋后满足二叉搜索树的性质:
- subR的左子树当中结点的值本身就比 parent 的值大,因此可以作为 parent 的右子树
- parent 及其左子树当中结点的值本身就比 subR 的值小,因此可以作为 subR 的左子树
然后进行更新平衡因子,平衡因子全部置为0

经过左单旋后,树的高度变已经降下来了
左单旋代码如下:
//左单旋
void RotateL(Node* parent)
{Node* subR = parent->_right;Node* subRL = subR->_left;//进行链接parent->_right = subRL;if (subRL)subRL->_parent = parent;Node* ppNode = parent->_parent;//记录parent节点的前一个节点subR->_left = parent;parent->_parent = subR;if (ppNode == nullptr)//即subR已经是根节点{_root = subR;_root->_parent = nullptr;}else//subR不是根节点{//与上一个节点进行链接if (ppNode->_left == parent)//parent原本在 ppNode 的左边{ppNode->_left = subR;}else//parent原本在 ppNode 的右边{ppNode->_right = subR;}subR->_parent = ppNode;}//旋转完成,更新平衡因子parent->_bf = subR->_bf = 0;
}注意: 结点是三叉链结构,改变结点关系时需要跟着改变父指针的指向
4.2 右单旋
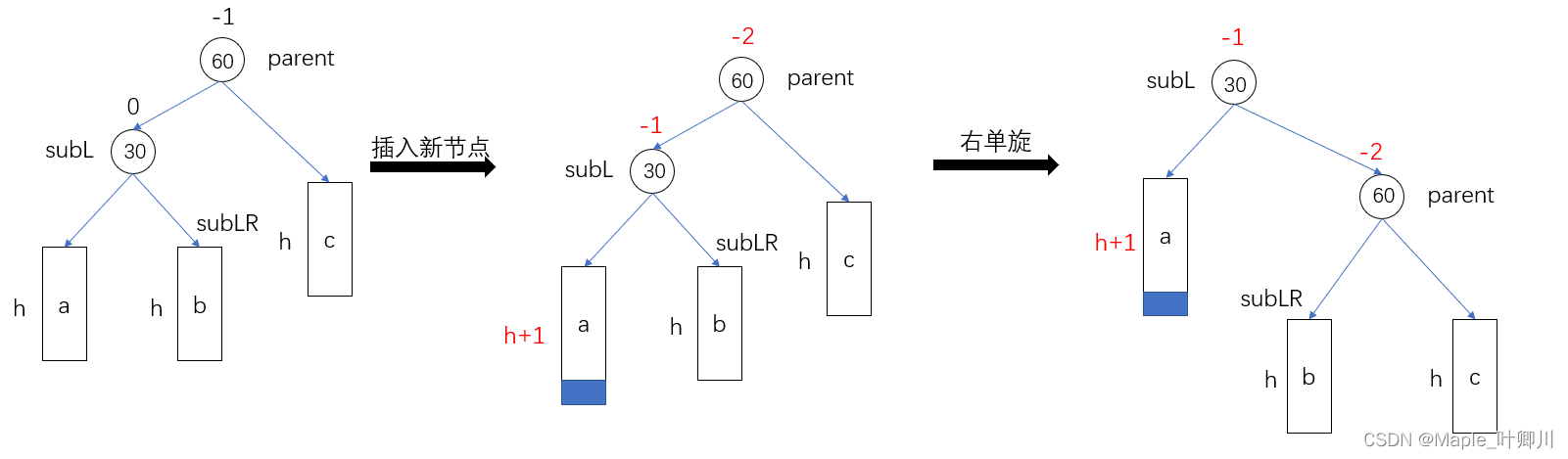
右单旋的步骤如下:
- 让 subL 的右子树作为 parent 的左子树
- 让 parent 作为 subL 的右子树
- 让 subL 作为整个子树的根
- 更新平衡因子
旋转示意图如下:
注:图片也是抽象图,涵盖无数种情况
右单旋后满足二叉搜索树的性质:
- subL 的右子树当中结点的值本身就比 parent 的值小,因此可以作为 parent 的左子树
- parent 及其右子树当中结点的值本身就比 subL 的值大,因此可以作为 subL 的右子树
然后进行更新平衡因子,平衡因子全部置为0
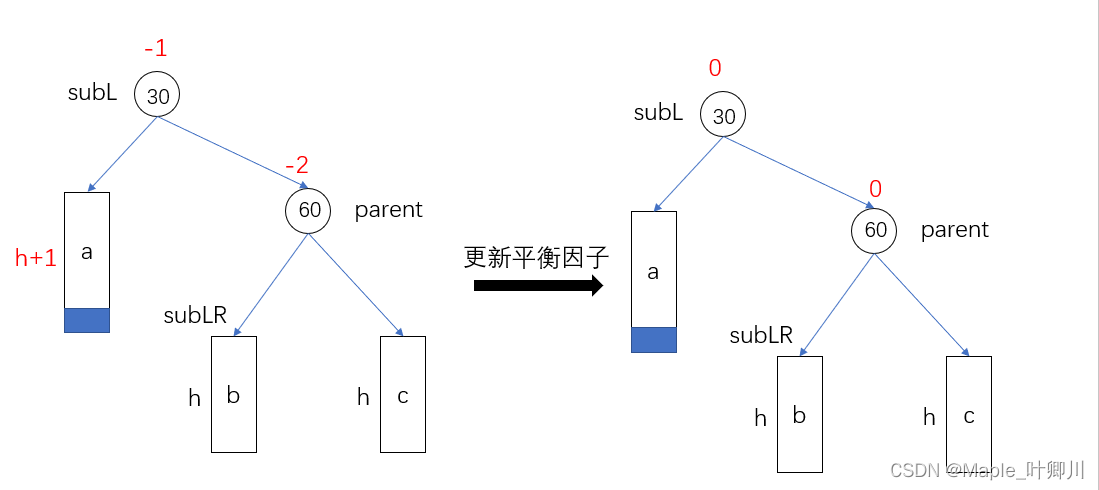
经过右单旋后,树的高度变已经降下来了
右单旋代码如下:
//右单旋
void RotateR(Node* parent)
{Node* subL = parent->_left;Node* subLR = subL->_right;//进行链接parent->_left = subLR;if (subLR)subLR->_parent = parent;Node* ppNode = parent->_parent;//记录parent节点的前一个节点subL->_right = parent;parent->_parent = subL;if (ppNode == nullptr)//即subL已经是根节点{_root = subL;subL->_parent = nullptr;}else//subR不是根节点{//与上一个节点进行链接if (ppNode->_left == parent)//parent原本在 ppNode 的左边{ppNode->_left = subL;}else//parent原本在 ppNode 的右边{ppNode->_right = subL;}subL->_parent = ppNode;}//旋转完成,更新平衡因子parent->_bf = subL->_bf = 0;
}注意: 结点是三叉链结构,改变结点关系时需要跟着改变父指针的指向
4.3 左右双旋
左右双旋的步骤如下:
- 以 subL 为旋转点进行左单旋
- 以 parent 为旋转点进行右单旋
- 更新平衡因子
旋转示意图如下:
(1)插入新节点

(2) 以 subL 为旋转点进行左单旋
注:双旋转后平衡因子是不对的,需要后序更新平衡因子
(3)以 parent 为旋转点进行右单旋

注:双旋转后平衡因子是不对的,需要后序更新平衡因子
左右双旋后满足二叉搜索树的性质,左右双旋后,实际上就是让 subLR 的左子树和右子树,分别作为subL和parent的右子树和左子树,再让subL和parent分别作为subLR的左右子树,最后让 subLR 作为整个子树的根(结合图理解)
(4)更新平衡因子
左右双旋之后,需要进行更新平衡因子,正确更新平衡因子的关键是:记录没有旋转之前 subLR 节点的平衡因子,该平衡因子用于判断以下三种情况:
- subLR 的平衡因子为1时,说明 subLR 的右子树是新增节点,左右双旋后 parent、subL、subLR 的平衡因子分别更新为0、-1、0
- subLR 的平衡因子为-1时,说明 subLR 的左子树是新增节点,左右双旋后 parent、subL、subLR 的平衡因子分别更新为1、0、0
- subLR 的平衡因子为0时,说明 subLR 自己就是新增节点,左右双旋后parent、subL、subLR的平衡因子分别更新为0、0、0
如图:
(1) subLR == -1

(2) subLR == 1
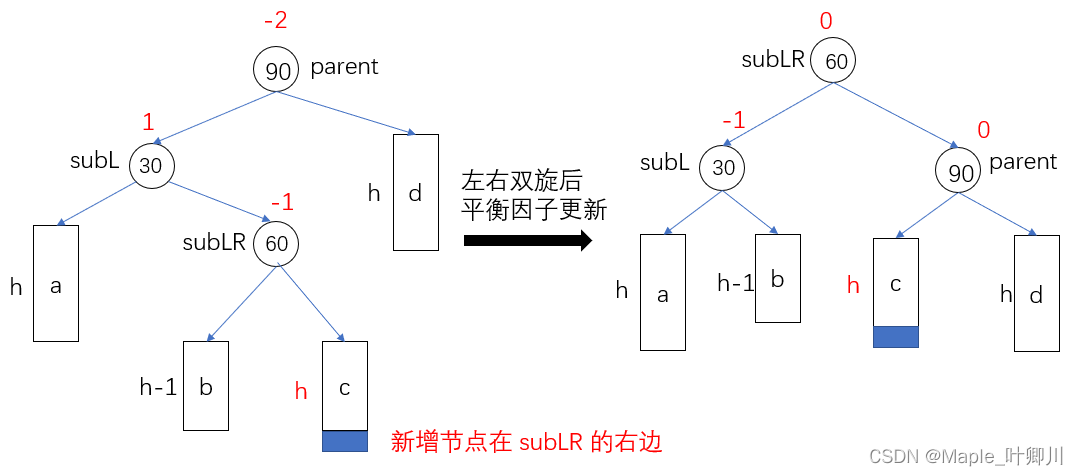
(3) subLR == 0

注意: subLR 自己就是新增节点时,其他情况都不会存在, subLR 不是这三种情况,插入有问题
左右双旋的代码如下:
//双旋转:左单旋后右单旋
void RotateLR(Node* parent)
{Node* subL = parent->_left;Node* subLR = subL->_right;int bf = subLR->_bf;//用于判断平衡因子的更新RotateL(parent->_left);RotateR(parent);//需要更新平衡因子if (bf == -1)//subLR 的左子树新增{subL->_bf = 0;parent->_bf = 1;subLR->_bf = 0;}else if (bf == 1)//subLR 的右子树新增{subL->_bf = -1;parent->_bf = 0;subLR->_bf = 0;}else if (bf == 0)//subLR 自己就是新增{subL->_bf = 0;parent->_bf = 0;subLR->_bf = 0;}else//不是上面三种情况,插入有问题{assert(false);}
}4.4 右左双旋
右左双旋的步骤如下:
- 以 subR 为旋转点进行右单旋
- 以 parent 为旋转点进行左单旋
- 更新平衡因子
旋转示意图如下:
(1)插入新节点

(2)以 subR 为旋转点进行右单旋

(3)以 parent 为旋转点进行左单旋

注:双旋转后平衡因子是不对的,需要后序更新平衡因子
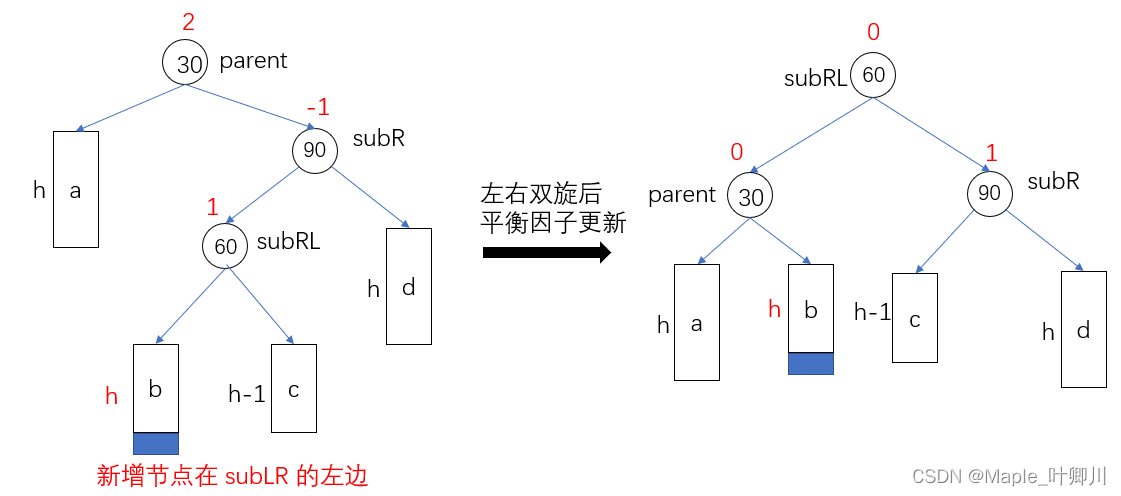
右左双旋后满足二叉搜索树的性质,右左双旋后,实际上就是让subRL的左子树和右子树,分别作为parent和subR的右子树和左子树,再让parent和subR分别作为subRL的左右子树,最后让subRL作为整个子树的根(结合图理解)
(4)更新平衡因子
右左双旋之后,需要进行更新平衡因子,正确更新平衡因子的关键是:记录没有旋转之前 subLR 节点的平衡因子,该平衡因子用于判断以下三种情况:(与左右双旋一致,右左双旋就是在另一边)
- subLR 的平衡因子为1时,说明 subLR 的右子树是新增节点,左右双旋后 parent、subL、subLR 的平衡因子分别更新为 -1、0、0
- subLR 的平衡因子为-1时,说明 subLR 的左子树是新增节点,左右双旋后 parent、subL、subLR 的平衡因子分别更新为 0、1、0
- subLR 的平衡因子为0时,说明 subLR 自己就是新增节点,左右双旋后parent、subL、subLR的平衡因子分别更新为 0、0、0
平衡因子更新如图:
(1) subLR == 1

(2) subLR == -1
(3) subLR == 0
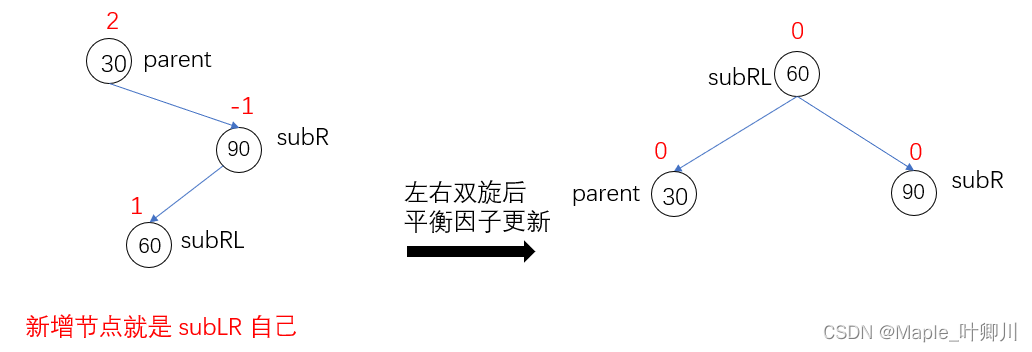
注意: subLR 自己就是新增节点时,其他情况都不会存在, subLR 不是这三种情况,插入有问题
右左双旋的代码如下:
//双旋转:右单旋后左单旋
void RotateRL(Node* parent)
{Node* subR = parent->_right;Node* subRL = subR->_left;int bf = subRL->_bf;//用于判断平衡因子的更新RotateR(parent->_right);RotateL(parent);//需要更新平衡因子if (bf == -1)//subRL 的左子树新增{subR->_bf = 1;parent->_bf = 0;subRL->_bf = 0;}else if (bf == 1)//subRL 的右子树新增{subR->_bf = 0;parent->_bf = -1;subRL->_bf = 0;}else if (bf == 0)//subLR 自己就是新增{subR->_bf = 0;parent->_bf = 0;subRL->_bf = 0;}else//不是上面三种情况,插入有问题{assert(false);}
}五、AVL树的验证
AVL树是在二叉搜索树的基础上加入了平衡性的限制,因此要验证AVL树,可以分两步:
(1)验证其为二叉搜索树
如果中序遍历可得到一个有序的序列,就说明为二叉搜索树
void InOrder()
{InOrder(_root);
}void _InOrder(Node* root)
{if (root == nullptr)return;_InOrder(root->_left);cout << root->_kv.first << ":" << root->_kv.second << endl;_InOrder(root->_right);
}(2)验证其为平衡树
每个节点子树高度差的绝对值不超过1,进行验证节点的平衡因子是否计算正确,结果为 true 平衡因子正常
//判断平衡因子是否异常
bool IsBalance()
{return IsBalance(_root);
}int Height(Node* root)
{if (root == nullptr)return 0;int lh = Height(root->_left);int rh = Height(root->_right);return lh > rh ? lh + 1 : rh + 1;
}bool IsBalance(Node* root)
{if (root == nullptr){return true;}int leftHeight = Height(root->_left);int rightHeight = Height(root->_right);if (rightHeight - leftHeight != root->_bf){cout << root->_kv.first << "平衡因子异常" << endl;return false;}return abs(rightHeight - leftHeight) < 2&& IsBalance(root->_left)&& IsBalance(root->_right);
}注:AVL树其他接口就不实现了,掌握插入即可,面试也比较关注AVL树的插入,即AVL树如何进行调平衡
六、AVL树的性能
AVL树是一棵绝对平衡的二叉搜索树,其要求每个节点的左右子树高度差的绝对值都不超过1,这样可以保证查询时高效的时间复杂度,即 logN(以2为底)。
但是如果要对AVL树做一些结构修改的操作,性能非常低下,比如:插入时要维护其绝对平衡,旋转的次数比较多,更差的是在删除时,有可能一直要让旋转持续到根的位置。
因此:如果需要一种查询高效且有序的数据结构,而且数据的个数为静态的(即不会改变),可以考虑AVL树,但一个结构经常修改,就不太适合
七、完整代码
AVLTree.h
#pragma once//K:key V:Value
template<class K, class V>
struct AVLTreeNode
{//构造函数AVLTreeNode(const pair<K, V>& kv):_kv(kv),_left(nullptr),_right(nullptr), _parent(nullptr),_bf(0){}//成员变量pair<K, V> _kv;AVLTreeNode<K, V>* _left;AVLTreeNode<K, V>* _right;AVLTreeNode<K, V>* _parent;int _bf; // balance factor 平衡因子
};template<class K, class V>
class AVLTree
{typedef AVLTreeNode<K, V> Node;
public:bool Insert(const pair<K, V>& kv){//节点为空,新建根节点,默认为平衡二叉树if (_root == nullptr){_root = new Node(kv);return true;}//节点为不空Node* parent = nullptr;//用于记录上一个节点Node* cur = _root;//寻找合适的位置进行插入while (cur){if (cur->_kv.first > kv.first){parent = cur;cur = cur->_left;}else if (cur->_kv.first < kv.first){parent = cur;cur = cur->_right;}else//cur->kv.first = kv.first要插入值已经存在,插入失败{return false;}}cur = new Node(kv);//插入if (parent->_kv.first < kv.first)//插入到parent左边{parent->_right = cur;cur->_parent = parent;}else//插入到parent右边{parent->_left = cur;cur->_parent = parent;}//进行更新平衡因子while (parent)//parent 为空,说明已经更新到根节点{if (parent->_left == cur)//新节点插入在parent左边{parent->_bf--;}else//新节点插入在parent右边{parent->_bf++;}//继续更新平衡因子的依据:根据子树的高度是否变化// (1)parent->_bf == 0 说明之前parent->_bf是 1 或者 -1,说明之前parent一边高一边低,// 这次插入填上矮的那边,parent所在子树高度不变,不需要继续往上更新// (2)parent->_bf == 1 或 -1 说明之前是 parent->_bf == 0,两边一样高,现在插入一边更高了,// parent所在子树高度变了,继续往上更新// (3)parent->_bf == 2 或 -2,说明之前 parent->_bf == 1 或者 -1,现在插入严重不平衡,违反规则// 需要就地处理 -- 旋转if (parent->_bf == 0)//第一种情况{break;}else if (parent->_bf == 1 || parent->_bf == -1)//第二种情况{cur = parent;parent = parent->_parent;}else if (parent->_bf == 2 || parent->_bf == -2)//第三种情况{// 旋转:// 1、让这颗子树左右高度不超过1// 2、旋转过程中继续保持他是搜索树// 3、更新调整孩子节点的平衡因子// 4、让这颗子树的高度跟插入前保持一致//旋转if (parent->_bf == 2 && cur->_bf == 1){RotateL(parent);//左单旋}else if (parent->_bf == -2 && cur->_bf == -1){RotateR(parent);//右单旋}else if (parent->_bf == -2 && cur->_bf == 1){RotateLR(parent);//双旋转:左单旋后右单旋}else if (parent->_bf == 2 && cur->_bf == -1){RotateRL(parent);//双旋转:右单旋后左单旋}break;}else//不是上面三种情况,插入有问题{assert(false);}}return true;}//左单旋void RotateL(Node* parent){Node* subR = parent->_right;Node* subRL = subR->_left;//进行链接parent->_right = subRL;if (subRL)subRL->_parent = parent;Node* ppNode = parent->_parent;//记录parent节点的前一个节点subR->_left = parent;parent->_parent = subR;if (ppNode == nullptr)//即subR已经是根节点{_root = subR;_root->_parent = nullptr;}else//subR不是根节点{//与上一个节点进行链接if (ppNode->_left == parent)//parent原本在 ppNode 的左边{ppNode->_left = subR;}else//parent原本在 ppNode 的右边{ppNode->_right = subR;}subR->_parent = ppNode;}//旋转完成,更新平衡因子parent->_bf = subR->_bf = 0;}//右单旋void RotateR(Node* parent){Node* subL = parent->_left;Node* subLR = subL->_right;//进行链接parent->_left = subLR;if (subLR)subLR->_parent = parent;Node* ppNode = parent->_parent;//记录parent节点的前一个节点subL->_right = parent;parent->_parent = subL;if (ppNode == nullptr)//即subL已经是根节点{_root = subL;subL->_parent = nullptr;}else//subR不是根节点{//与上一个节点进行链接if (ppNode->_left == parent)//parent原本在 ppNode 的左边{ppNode->_left = subL;}else//parent原本在 ppNode 的右边{ppNode->_right = subL;}subL->_parent = ppNode;}//旋转完成,更新平衡因子parent->_bf = subL->_bf = 0;}//双旋转:左单旋后右单旋void RotateLR(Node* parent){Node* subL = parent->_left;Node* subLR = subL->_right;int bf = subLR->_bf;//用于判断平衡因子的更新RotateL(parent->_left);RotateR(parent);//需要更新平衡因子if (bf == -1)//subLR 的左子树新增{subL->_bf = 0;parent->_bf = 1;subLR->_bf = 0;}else if(bf == 1)//subLR 的右子树新增{subL->_bf = -1;parent->_bf = 0;subLR->_bf = 0;}else if (bf == 0)//subLR 自己就是新增{subL->_bf = 0;parent->_bf = 0;subLR->_bf = 0;}else//不是上面三种情况,插入有问题{assert(false);}}//双旋转:右单旋后左单旋void RotateRL(Node* parent){Node* subR = parent->_right;Node* subRL = subR->_left;int bf = subRL->_bf;//用于判断平衡因子的更新RotateR(parent->_right);RotateL(parent);//需要更新平衡因子if (bf == -1)//subRL 的左子树新增{subR->_bf = 1;parent->_bf = 0;subRL->_bf = 0;}else if (bf == 1)//subRL 的右子树新增{subR->_bf = 0;parent->_bf = -1;subRL->_bf = 0;}else if (bf == 0)//subLR 自己就是新增{subR->_bf = 0;parent->_bf = 0;subRL->_bf = 0;}else//不是上面三种情况,插入有问题{assert(false);}}//void InOrder(){_InOrder(_root);}//判断平衡因子是否异常bool IsBalance(){return IsBalance(_root);}
private:void _InOrder(Node* root){if (root == nullptr)return;_InOrder(root->_left);cout << root->_kv.first << ":" << root->_kv.second << endl;_InOrder(root->_right);}int Height(Node* root){if (root == nullptr)return 0;int lh = Height(root->_left);int rh = Height(root->_right);return lh > rh ? lh + 1 : rh + 1;}bool IsBalance(Node* root){if (root == nullptr){return true;}int leftHeight = Height(root->_left);int rightHeight = Height(root->_right);if (rightHeight - leftHeight != root->_bf){cout << root->_kv.first << "平衡因子异常" << endl;return false;}return abs(rightHeight - leftHeight) < 2&& IsBalance(root->_left)&& IsBalance(root->_right);}
private:Node* _root = nullptr;
};
Test.cpp
#include <iostream>
using namespace std;
#include <assert.h>
#include "AVLTree.h"void TestAVLTree1()
{//int arr[] = { 8, 3, 1, 10, 6, 4, 7, 14, 13 };int arr[] = { 16, 3, 7, 11, 9, 26, 18, 14, 15 };//int arr[] = { 4, 2, 6, 1, 3, 5, 15, 7, 16, 14 };AVLTree<int, int> t;for (auto e : arr){t.Insert(make_pair(e, e));}t.InOrder();
}void TestAVLTree2()
{srand(time(0));//随机数种子const size_t N = 100000;AVLTree<int, int> t;for (size_t i = 0; i < N; ++i){size_t x = rand();t.Insert(make_pair(x, x));//cout << t.IsBalance() << endl;}//判断平衡因子是否异常cout << t.IsBalance() << endl;
}int main()
{//TestAVLTree1();TestAVLTree2();return 0;
}----------------我是分割线---------------
文章到这里就结束了,下一篇即将更新
相关文章:
【C++进阶】四、AVL树(二)
目录 前言 一、AVL树的概念 二、AVL树节点的定义 三、AVL树的插入 四、AVL树的旋转 4.1 左单旋 4.2 右单旋 4.3 左右双旋 4.4 右左双旋 五、AVL树的验证 六、AVL树的性能 七、完整代码 前言 前面对 map/multimap/set/multiset 进行了简单的介绍,在其文…...
React 服务端渲染
React 服务器端渲染概念回顾什么是客户端渲染CSR(Client Side Rendering)服务器端只返回json数据,Data和Html的拼接在客户端进行(渲染)。什么是服务器端渲染SSR(Server Side Rendering)服务器端返回数据拼接过后的HTML,Data和Html…...
)
【算法设计-搜索】回溯法应用举例(1)
文章目录0. 回溯模板1. 走楼梯2. 机器走格子,但限定方向3. 中国象棋,马走日字4. 走迷宫5. 积木覆盖0. 回溯模板 搜索算法中的回溯策略,也是深度优先搜索的一种策略,比较接近早期的人工智能。毕竟,搜索是人工智能技术中…...

C++基础了解-23-C++ 多态
C 多态 一、C 多态 多态按字面的意思就是多种形态。当类之间存在层次结构,并且类之间是通过继承关联时,就会用到多态。 C 多态意味着调用成员函数时,会根据调用函数的对象的类型来执行不同的函数。 下面的实例中,基类 Shape 被…...
【GNN/深度学习】常用的图数据集(资源包)
【GNN/深度学习】常用的图数据集(图结构) 文章目录【GNN/深度学习】常用的图数据集(图结构)1. 介绍2. 图数据集2.1 Cora2.2 Citeseer2.3 Pubmed2.4 DBLP2.5 ACM2.6 AMAP & AMAC2.7 WIKI2.8 COCS2.9 BAT2.10 EAT2.11 UAT2.12 C…...
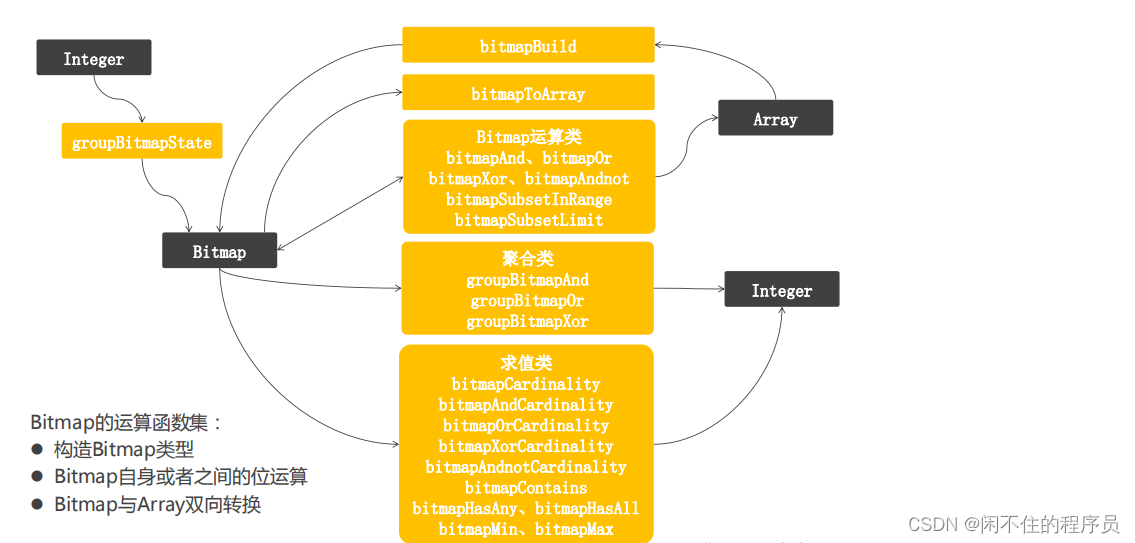
Clickhouse中bitmap介绍以及计算留存Demo
前言 参考了腾迅的大数据分析-计算留存,能够根据用户自定义属性,以及玩家行为进行留存的计算。最初计算留存的方法使用的是clickhosue自带的rentention函数,使用这个函数不用关注太多细节,只需要把留存条件放入函数即可。但是这个如果需要关联用户属性,就比较麻烦了。因此…...
大数据是什么?学习后能找高薪工作么
大数据是什么,比较官方的定义是指无法在一定时间范围内用常规软件工具进行捕捉、管理和处理的数据集合,是需要新处理模式才能具有更强的决策力、洞察发现力和流程优化能力的海量、高增长率和多样化的信息资产。 简单来说,大数据就是结构化的…...

如何提取视频中的音频转文字?分享提效减负视频转文字方法
最近我在学做短视频,就看了很多博主怎么做视频,像他们的拍摄方法、剪辑角度还有怎么写文案。我一开始只看了一两个博主,写文案时就是边看视频边打字,这视频量少还好,视频多了就觉得这种方法好费时间,感觉一…...
脑机接口科普0018——前额叶切除手术
本文禁止转载!!! 首先说明一下,前额叶切除手术,现在已经不允许做了。 其次,前额叶切除手术,发明这个手术的人居然还获得了诺贝尔奖。太过于讽刺。1949年的那次诺贝尔医学奖(就是我…...

FPGA工程师面试——基础知识
1. 简述FPGA等可编程逻辑器件设计流程 答:系统设计电路构思,设计说明与设计划分, 电路设计与输入(HDL代码、原理图), 功能仿真与测试, 逻辑综合, 门级综合, 逻辑验证与测…...
全国青少年软件编程(Scratch)等级考试一级真题——2019.12
青少年软件编程(Scratch)等级考试试卷(一级)分数:100 题数:37一、单选题(共25题,每题2分,共50分)1.下列关于舞台的描述,不正确的是?( )…...

【Integrated Electronics系列——数字电子技术基础】
目录 序言...

【微信小程序】-- 页面处理总结(三十一)
💌 所属专栏:【微信小程序开发教程】 😀 作 者:我是夜阑的狗🐶 🚀 个人简介:一个正在努力学技术的CV工程师,专注基础和实战分享 ,欢迎咨询! &…...

Spring Batch使用详细例子
Spring Batch 是一个开源的批处理框架,它提供了一种简单的方式来处理大规模的数据处理任务。它基于 Spring 框架,可以与 Spring 的其他组件无缝集成,如 Spring Boot、Spring Data 等。本文将介绍如何使用 Spring Batch 进行批处理任务。 1. 准…...

漏洞预警|Apache Dubbo 存在反序列化漏洞
棱镜七彩安全预警 近日网上有关于开源项目Apache Dubbo 存在反序列化漏洞,棱镜七彩威胁情报团队第一时间探测到,经分析研判,向全社会发起开源漏洞预警公告,提醒相关安全团队及时响应。 项目介绍 Apache Dubbo 是一款 RPC 服务开…...

Tomcat源码分析-spring boot集成tomcat
SPI 在分析源码前,我们先来了解下 spring 的 SPI 机制。我们知道,jdk 为了方便应用程序进行扩展,提供了默认的 SPI 实现(ServiceLoader),dubbo 也有自己的 SPI。spring 也是如此,他为我们提供了…...
一个古老的html后台的模板代码
效果图下: css部分代码:/* CSS Document / body{font-family:“宋体”, Arial,Verdana, sans-serif, Helvetica;font-size:12px;margin:0;background:#f4f5eb;color:#000;} dl,ul,li{list-style:none;} a img{border:0;} a{color:#000;} a:link,a:visit…...
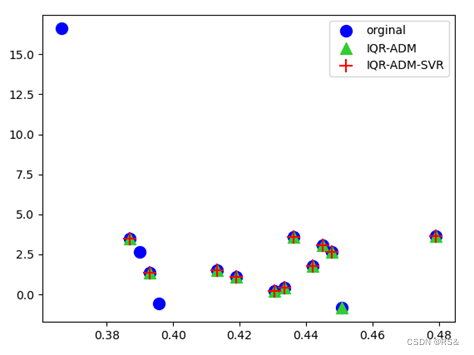
支持向量回归删除异常值Python
1、支持向量回归(SVR)原理 支持向量回归(Support Vector Regression,SVR)不仅可以用于预测,还可以用于异常值检测。其基本思路是训练一个回归模型,通过对每个数据点进行预测,并计算…...
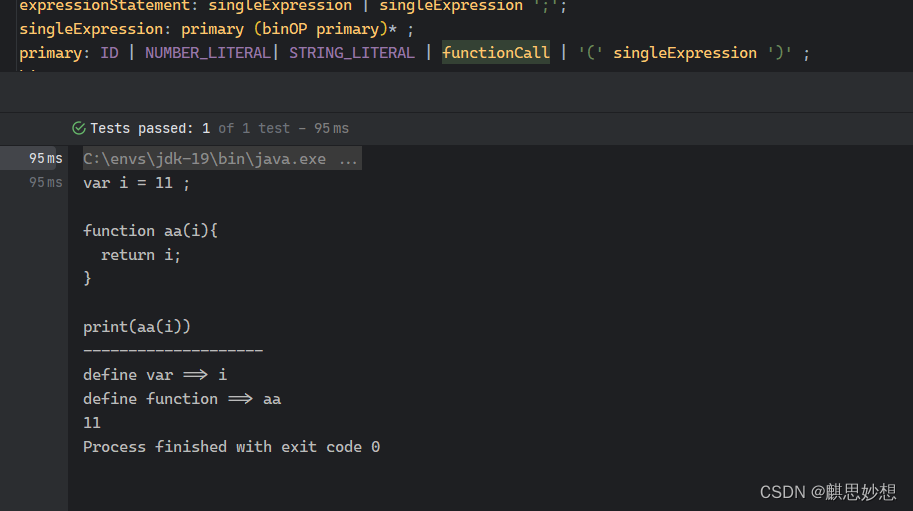
手把手开发一门程序语言JimLang (2)
根据爱因斯坦的相对论,物体的质量越大,时间过得越快,所以托更对于我的煎熬,远远比你们想象的还要痛苦…今天给大家来盘硬菜,也是前些时日预告过的JimLang的开发过程… Let’s go !!! 语法及解析 JimLang.g4 这里我们…...
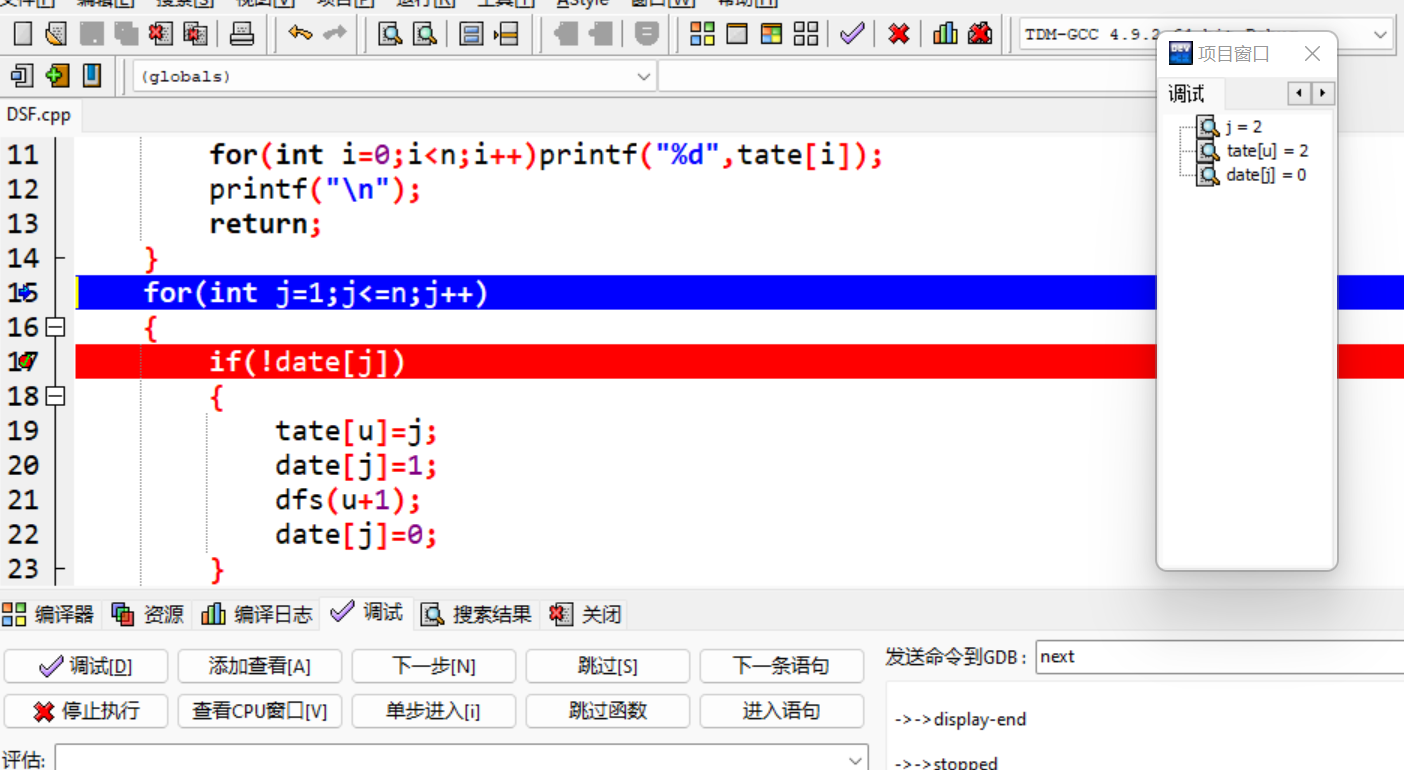
DSF深度搜索时到底是如何回溯的(小tip)
这一段让我迷了两次,为什么回溯的时候,恢复了最后一位,往上递归一层之后,把最后一位填在它前一位,但是原本的前一位没有恢复,最后一位要怎么办?其实这还是递归没明白 也就是这一步是如何实现的 …...

Chapter03-Authentication vulnerabilities
文章目录 1. 身份验证简介1.1 What is authentication1.2 difference between authentication and authorization1.3 身份验证机制失效的原因1.4 身份验证机制失效的影响 2. 基于登录功能的漏洞2.1 密码爆破2.2 用户名枚举2.3 有缺陷的暴力破解防护2.3.1 如果用户登录尝试失败次…...

Linux 文件类型,目录与路径,文件与目录管理
文件类型 后面的字符表示文件类型标志 普通文件:-(纯文本文件,二进制文件,数据格式文件) 如文本文件、图片、程序文件等。 目录文件:d(directory) 用来存放其他文件或子目录。 设备…...

调用支付宝接口响应40004 SYSTEM_ERROR问题排查
在对接支付宝API的时候,遇到了一些问题,记录一下排查过程。 Body:{"datadigital_fincloud_generalsaas_face_certify_initialize_response":{"msg":"Business Failed","code":"40004","sub_msg…...

SciencePlots——绘制论文中的图片
文章目录 安装一、风格二、1 资源 安装 # 安装最新版 pip install githttps://github.com/garrettj403/SciencePlots.git# 安装稳定版 pip install SciencePlots一、风格 简单好用的深度学习论文绘图专用工具包–Science Plot 二、 1 资源 论文绘图神器来了:一行…...
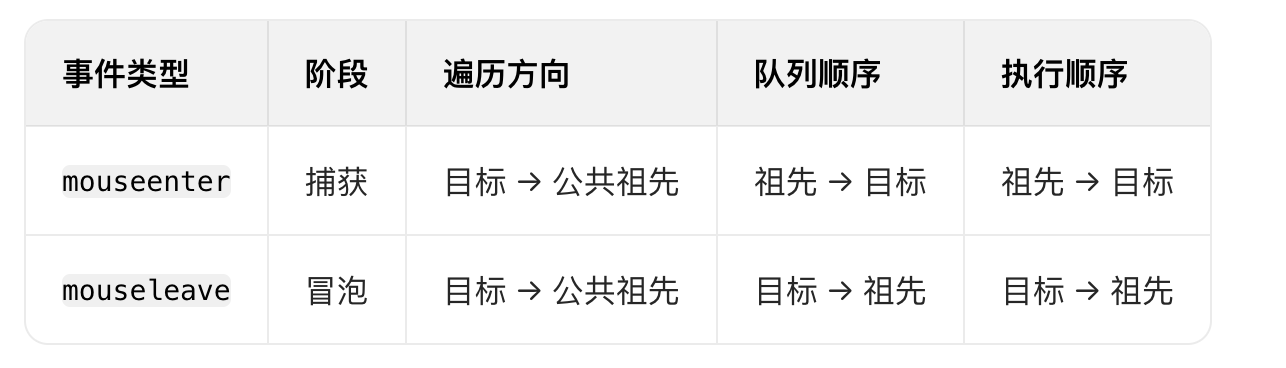
React19源码系列之 事件插件系统
事件类别 事件类型 定义 文档 Event Event 接口表示在 EventTarget 上出现的事件。 Event - Web API | MDN UIEvent UIEvent 接口表示简单的用户界面事件。 UIEvent - Web API | MDN KeyboardEvent KeyboardEvent 对象描述了用户与键盘的交互。 KeyboardEvent - Web…...
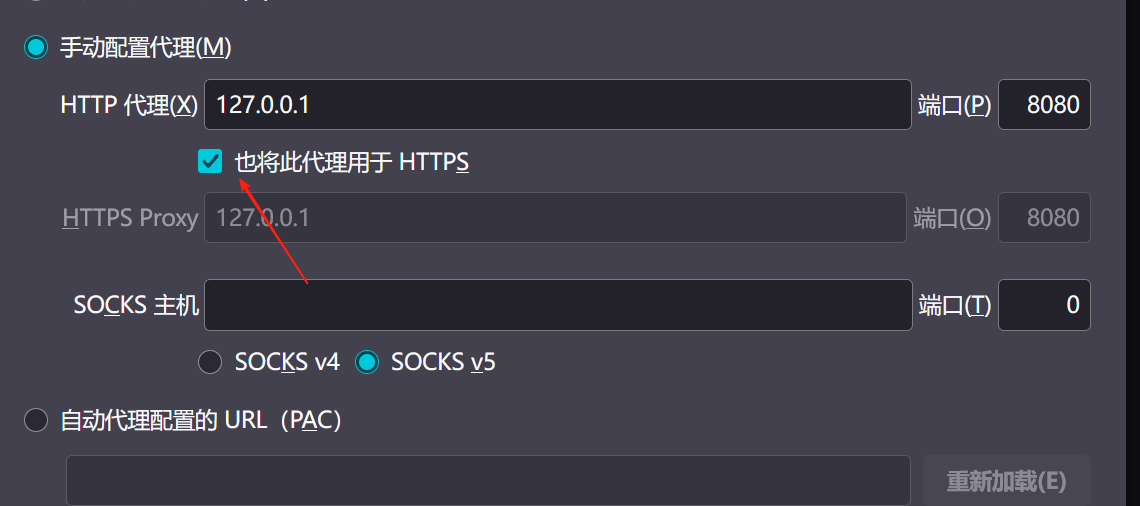
【2025年】解决Burpsuite抓不到https包的问题
环境:windows11 burpsuite:2025.5 在抓取https网站时,burpsuite抓取不到https数据包,只显示: 解决该问题只需如下三个步骤: 1、浏览器中访问 http://burp 2、下载 CA certificate 证书 3、在设置--隐私与安全--…...

USB Over IP专用硬件的5个特点
USB over IP技术通过将USB协议数据封装在标准TCP/IP网络数据包中,从根本上改变了USB连接。这允许客户端通过局域网或广域网远程访问和控制物理连接到服务器的USB设备(如专用硬件设备),从而消除了直接物理连接的需要。USB over IP的…...
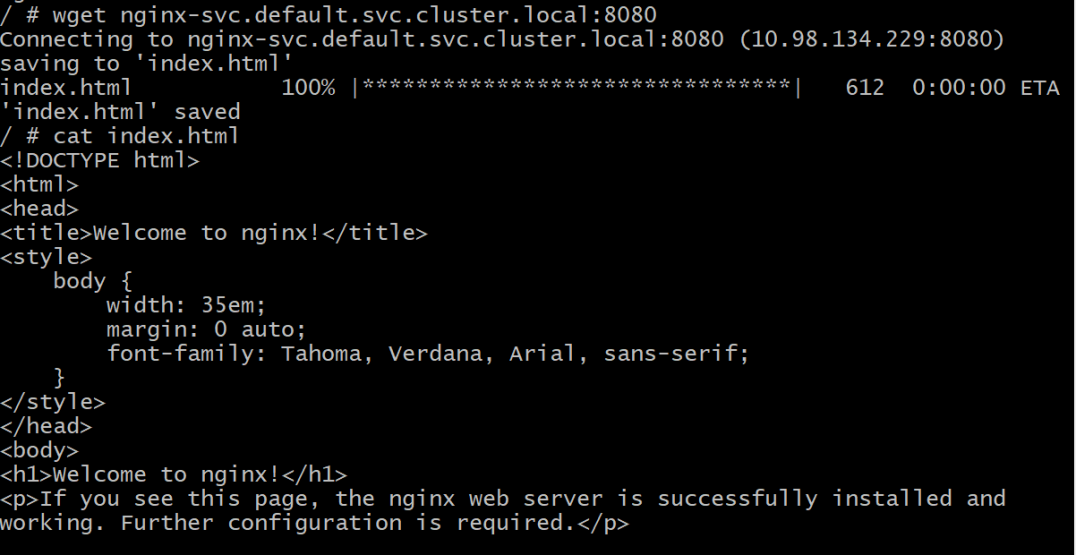
初探Service服务发现机制
1.Service简介 Service是将运行在一组Pod上的应用程序发布为网络服务的抽象方法。 主要功能:服务发现和负载均衡。 Service类型的包括ClusterIP类型、NodePort类型、LoadBalancer类型、ExternalName类型 2.Endpoints简介 Endpoints是一种Kubernetes资源…...
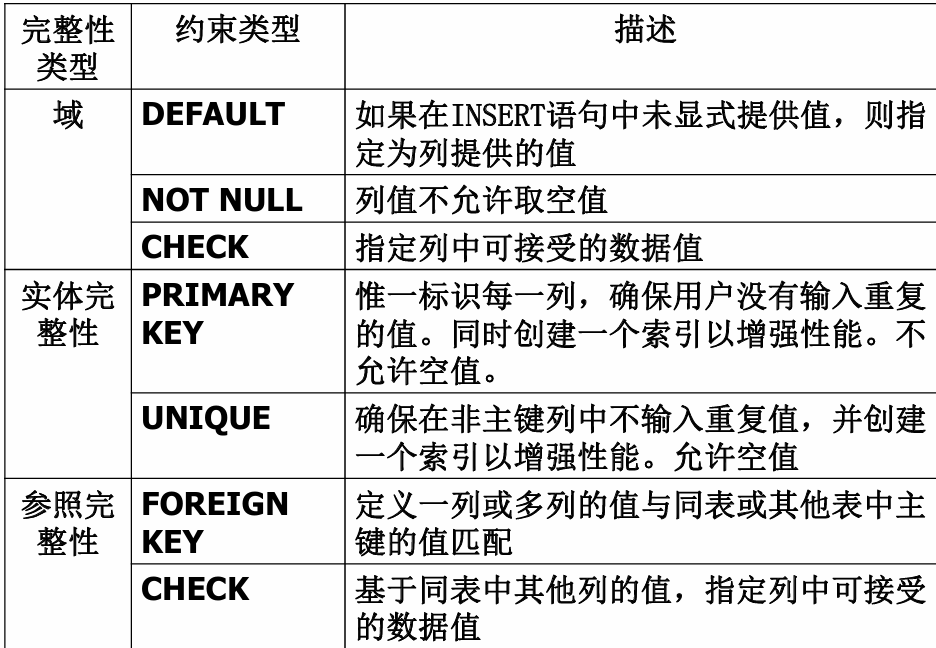
七、数据库的完整性
七、数据库的完整性 主要内容 7.1 数据库的完整性概述 7.2 实体完整性 7.3 参照完整性 7.4 用户定义的完整性 7.5 触发器 7.6 SQL Server中数据库完整性的实现 7.7 小结 7.1 数据库的完整性概述 数据库完整性的含义 正确性 指数据的合法性 有效性 指数据是否属于所定…...

招商蛇口 | 执笔CID,启幕低密生活新境
作为中国城市生长的力量,招商蛇口以“美好生活承载者”为使命,深耕全球111座城市,以央企担当匠造时代理想人居。从深圳湾的开拓基因到西安高新CID的战略落子,招商蛇口始终与城市发展同频共振,以建筑诠释对土地与生活的…...