【三维点云】01-激光雷达原理与应用
文章目录
- 内容概要
- 1 激光雷达原理
- 1.1 什么是激光雷达?
- 1.2 激光雷达原理
- 1.3 激光雷达分类
- 三角法
- TOF法
- 脉冲间隔测量法
- 幅度调制的相位测量法
- 相干法
- 激光雷达用途
- 2 激光雷达安装、标定与同步
- 2.1 激光雷达安装方式
- 考虑因素
- 2.2 激光雷达点云用途
- 2.3 数据融合
- 多激光雷达数据融合
- 多传感器数据融合
- 2.4 激光雷达系统方案
- 硬件部分
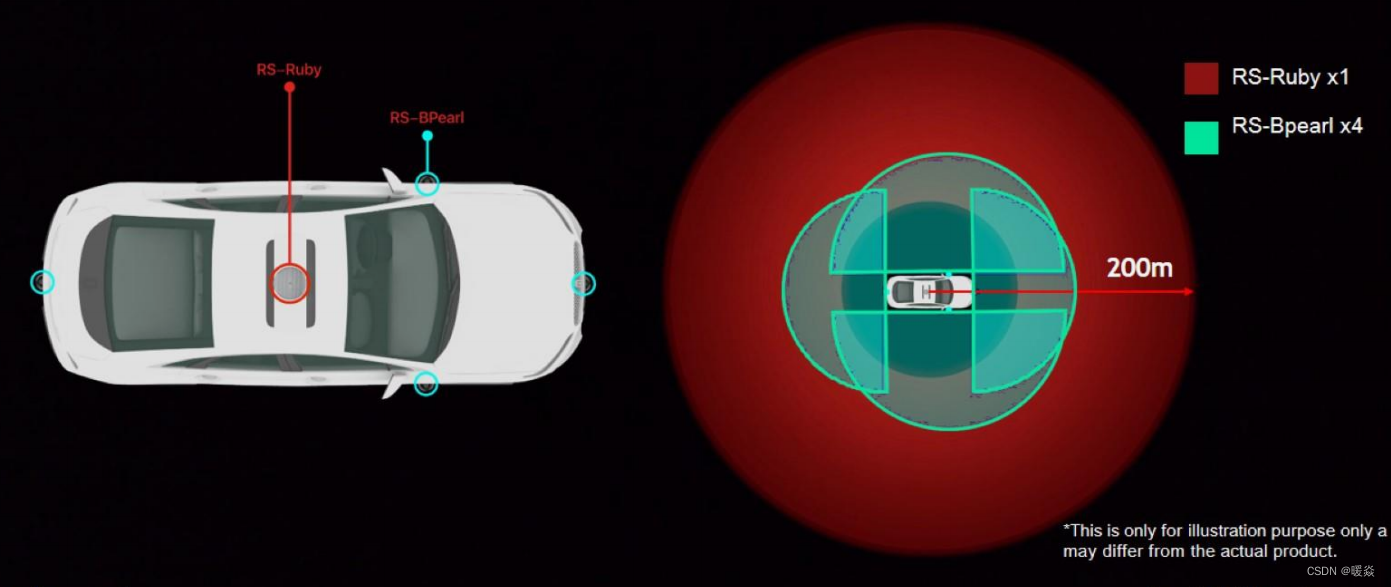
- 全方位感知(主雷达+近补雷达)
- 反射强度
- 抗干扰
- 抗多雷达对射干扰
- 抗强光干扰
- 多传感器融合
- 多传感器标定
- 时间同步
- 空间同步
- 软件部分
- 障碍物检测
- 障碍物分类
- 运动物体跟踪
- 可行驶区域检测
- SLAM建图
- 重定位
- 3 激光雷达数据采集
- 4 ROS编程基础
内容概要
1 激光雷达原理
2 激光雷达安装、标定与同步
3 激光雷达数据采集
4 ROS编程基础
1 激光雷达原理
1.1 什么是激光雷达?
LiDAR,Light Detection And Ranging
LADAR,LAser Detection And Ranging

探测和测距系统利用发射出的不同频率的波长,根据其从障碍物上返回所需的时间来绘制一个区域的地图。
LiDAR、Laser Radar以及LADAR系统,都使用光频率来进行这类测量。各系统之间,虽然原理近似,但应用特点和适用领域大有不同。
LiDAR已广泛意义上成为基于光的非接触式测量仪器的统称,但在实践中,LiDAR测量设备在处理“大区域”、“大容量”扫描领域作业中更加适用,系统通常会以网格或锥形的方式发出多束激光,并通过不断运动快速覆盖数百万个点,其精度根据需求,从0.1英寸(2.54毫米)到超过1英尺(304.8毫米)不等。LiDAR测量系统在土地测绘、建筑信息建模和自动驾驶汽车的导航系统中应用较为普遍。
Laser Radar系统,则更接近于:采用非合作靶标进行测量的激光跟踪仪。测量时,Laser Radar系统通常会发出一个单一的、聚焦的激光束来测量几米范围内的特征,精度在微米级别。
LADAR系统,正好集合了LiDAR与Laser Radar系统的优势。LADAR测量系统,如API品牌的9D LADAR,可以在不牺牲精度的前提下,提供更大的测量范围。LADAR系统可在所有Laser Radar适用领域中应用,并提供更佳的测量效率,完美适用于以白车身检测或机身装配等为代表的高端应用环境。
LiDAR系统更多地利用网格或锥状激光束来增加覆盖范围,并在较远的距离以较低的精度收集数据;Laser Radar系统则牺牲了测量速度和效率,以提高单点测量精度;对于制造业中真正高效、流畅运作的自动化近线/在线检测解决方案来讲,LiDAR系统缺乏精度,而Laser Radar则缺乏测量的速度和效率。LADAR系统,则兼容了前两种系统的优势,能够同时保障精度与速度,实现更高效的测量,更加适用于工业自动化生产领域的各测量环节。
参考:LADAR, LiDAR & Laser Radar激光雷达的种类划分与功能对比
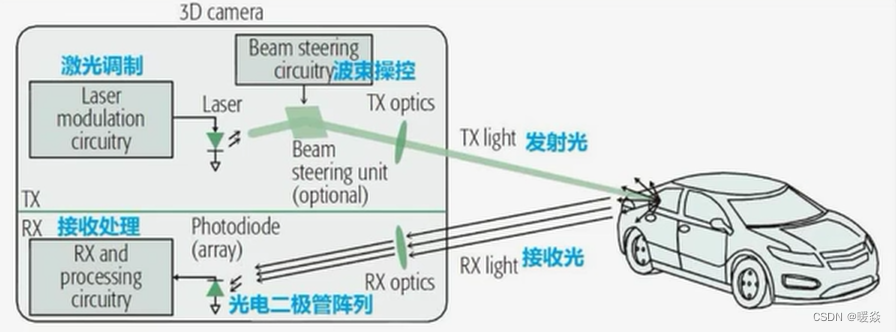
1.2 激光雷达原理
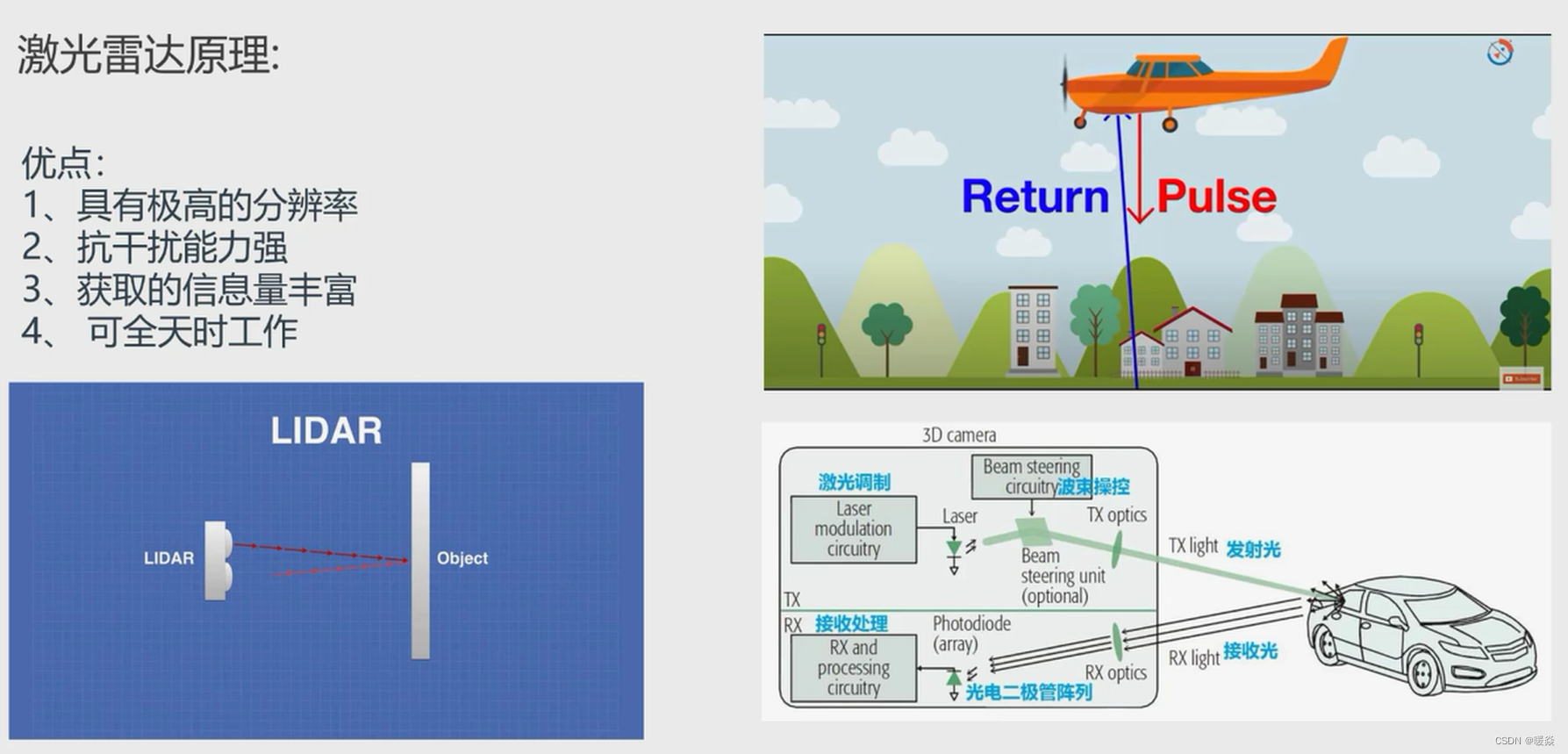
激光雷达优点:
1、具有极高的分辨率
2、抗干扰能力强
3、获取的信息量丰富
4、可全天时工作
激光雷达缺点:
易受环境中可反射激光物质的影响,例如天气(雨天)、灰尘和昆虫等影响。
1.3 激光雷达分类
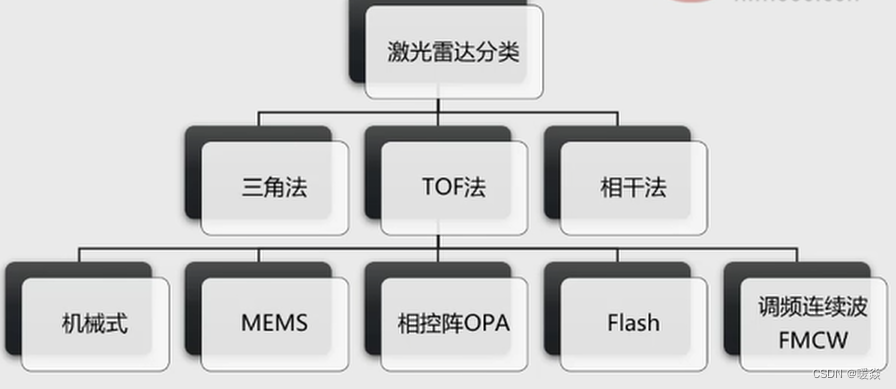
三角法
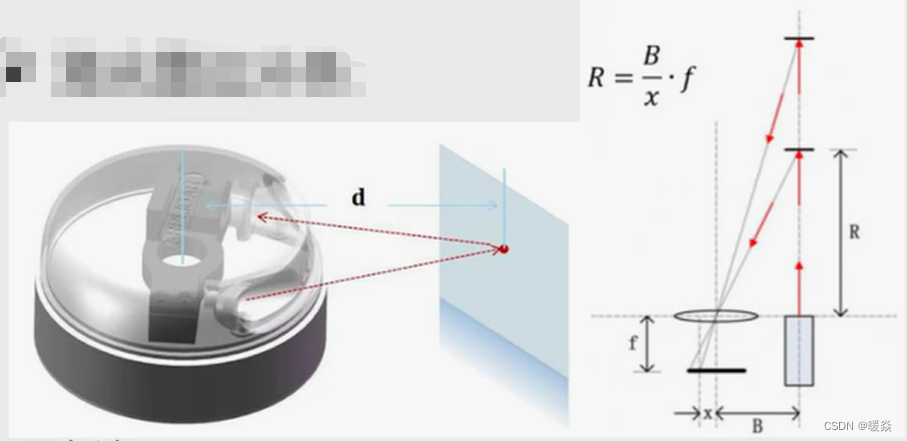
适应于近距离,百微米精度,随着距离的增加,精度会变得更差。
TOF法
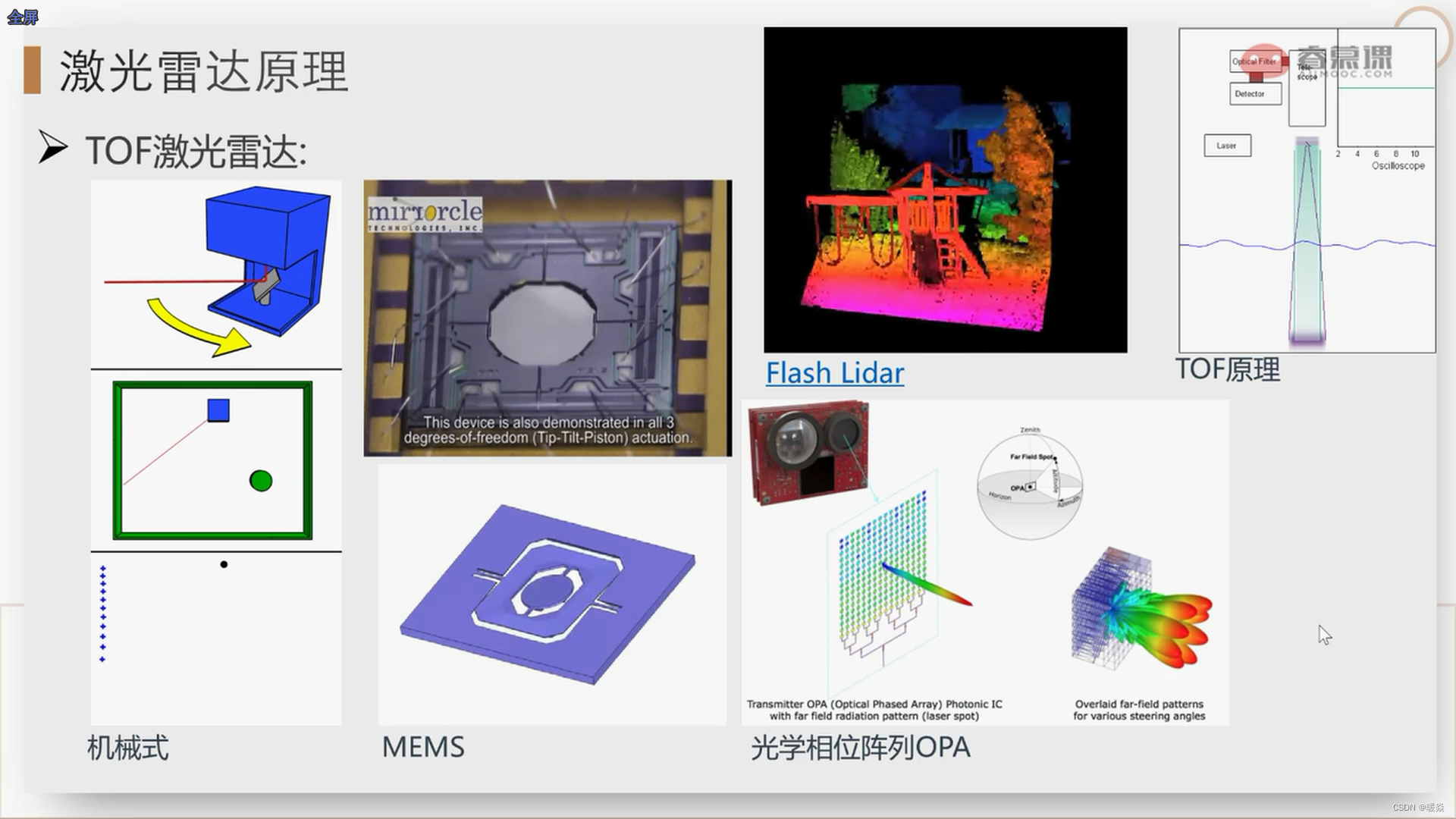
脉冲间隔测量法
幅度调制的相位测量法
脉冲型TOF法,随着距离的增加所需要测算的精度要更高,发射器件的功率要大,对发射器提出了高要求,所以长距离的高精度是没有办法实现的。
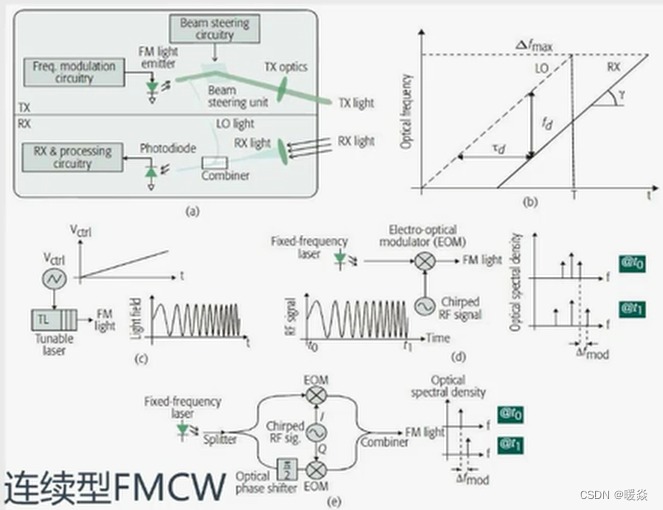
相干法
需要连续时间波长的叠加计算时间和距离,测量速度慢但是精度高,所以一般适用于手持扫描仪器中。

激光雷达用途
autonomous vehicles

agriculture
river survey
modelling of the pollution
archeology and building construction
2 激光雷达安装、标定与同步
2.1 激光雷达安装方式
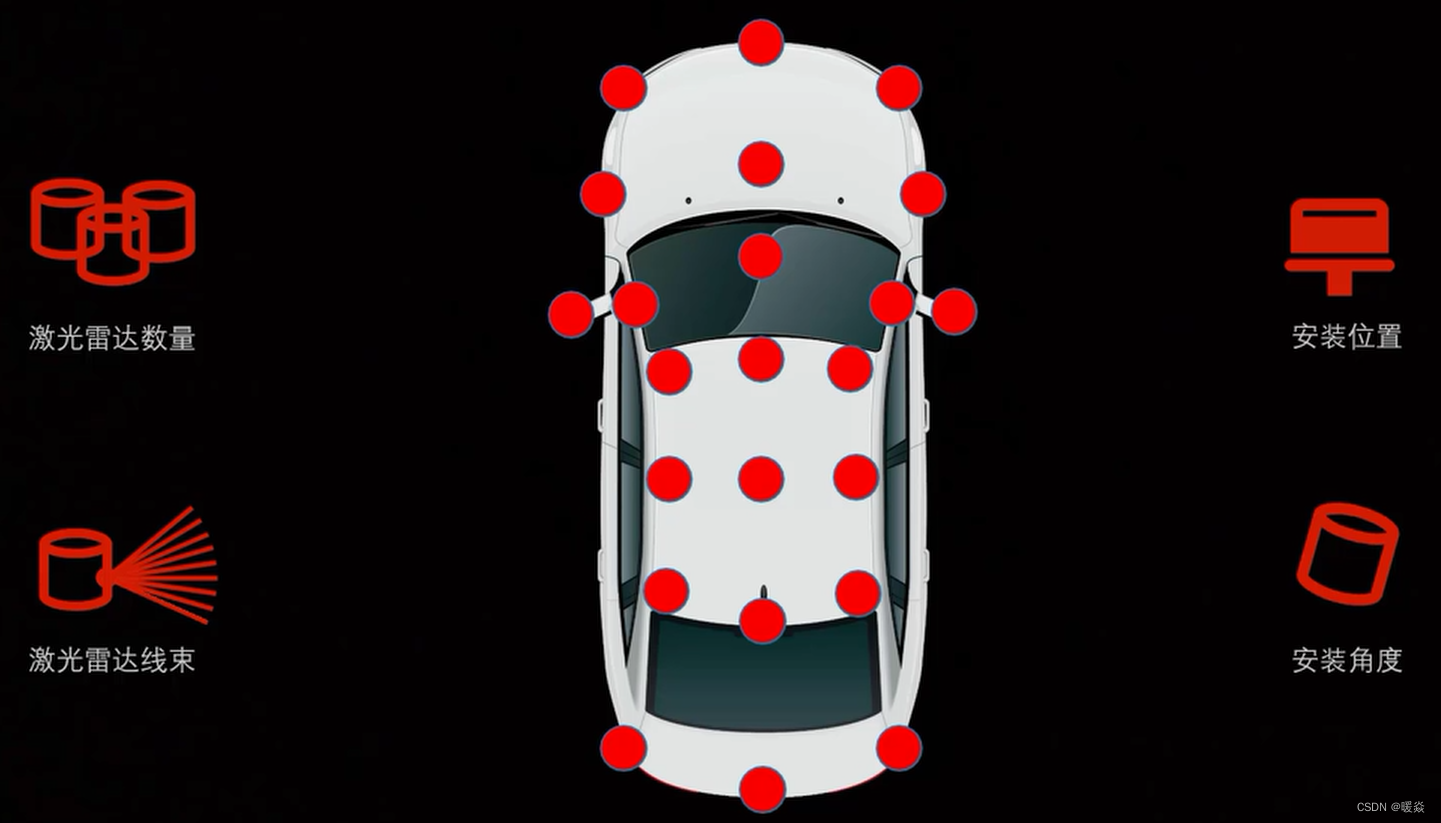
考虑因素
激光雷达数量
激光雷达线束
安装位置
安装角度
2.2 激光雷达点云用途

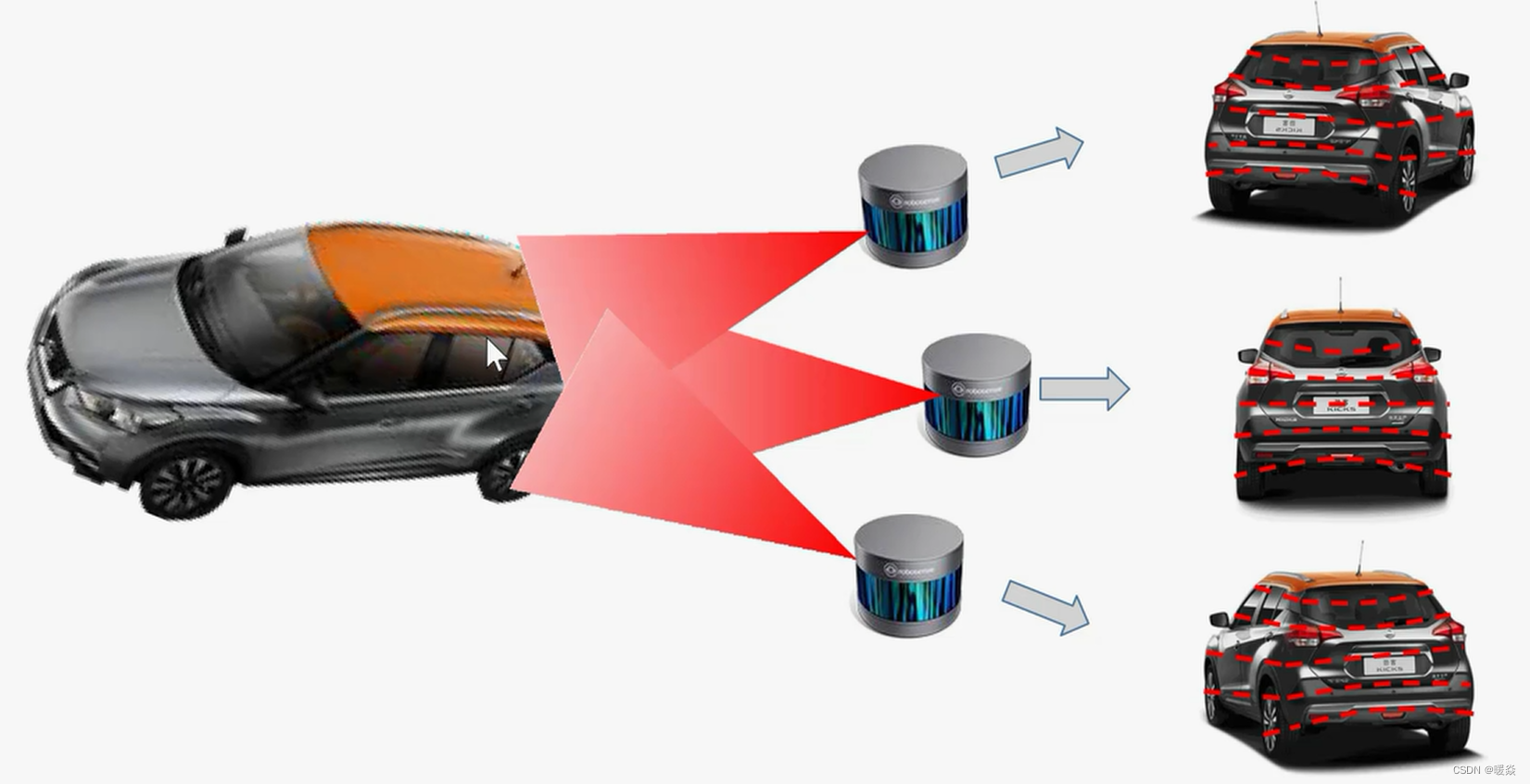
2.3 数据融合
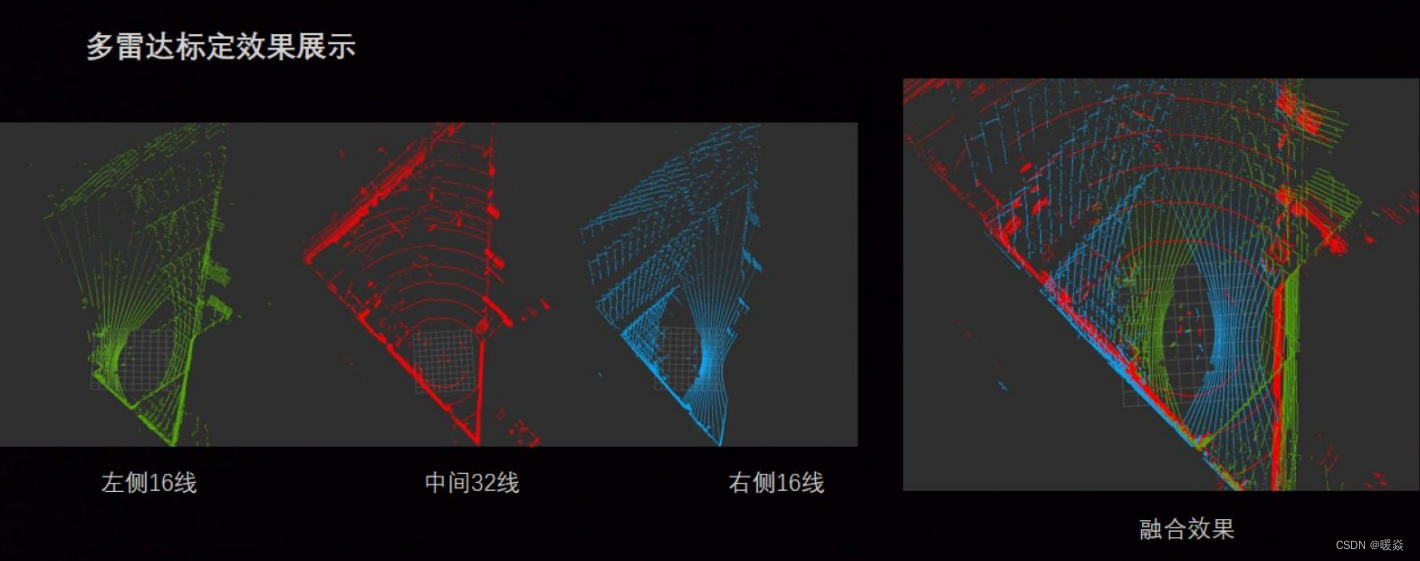
多激光雷达数据融合
为达到多线的效果,以多个少线数的激光雷达进行融合,降低成本。
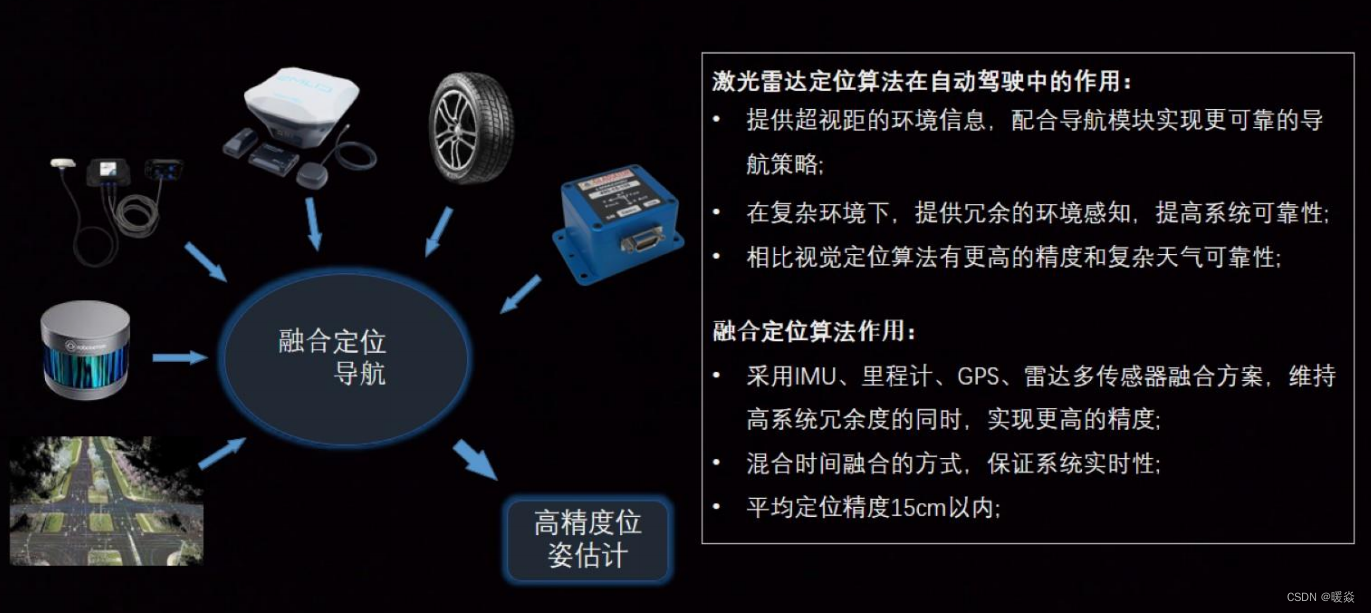
多传感器数据融合
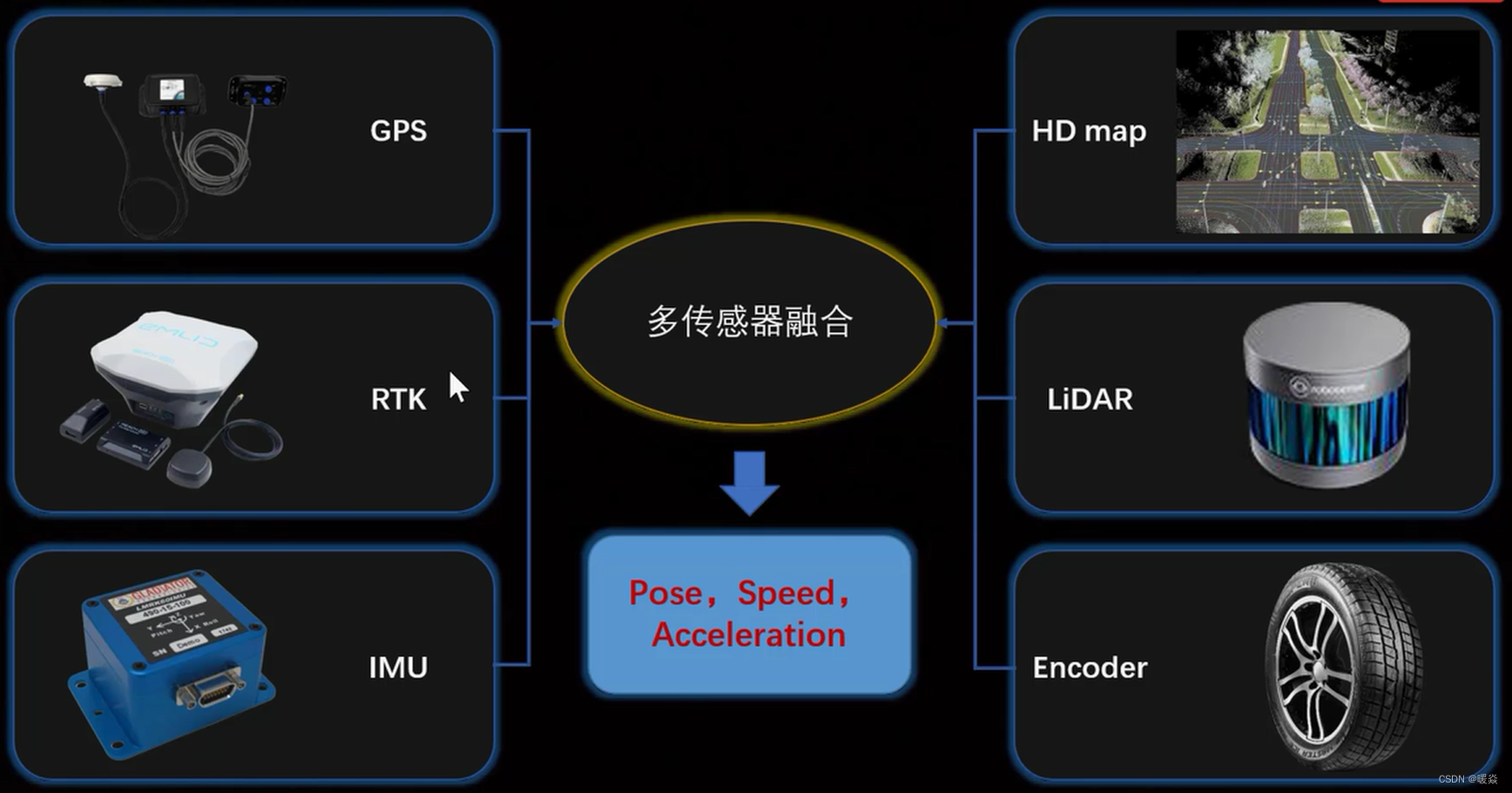
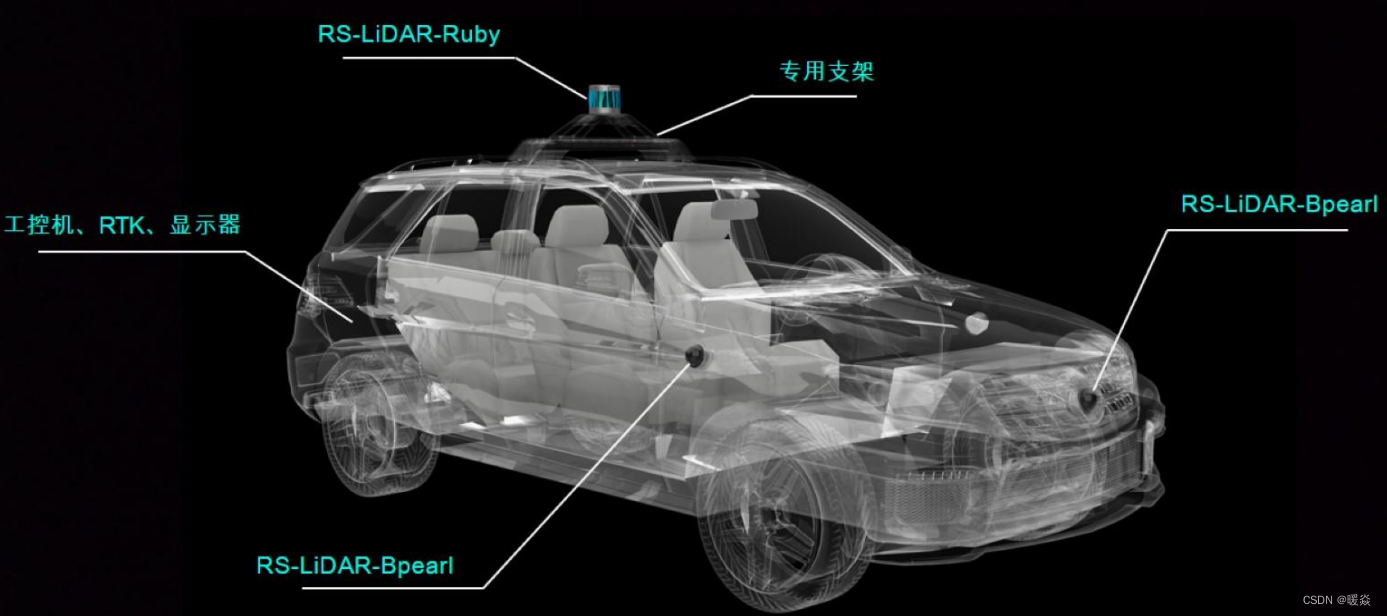
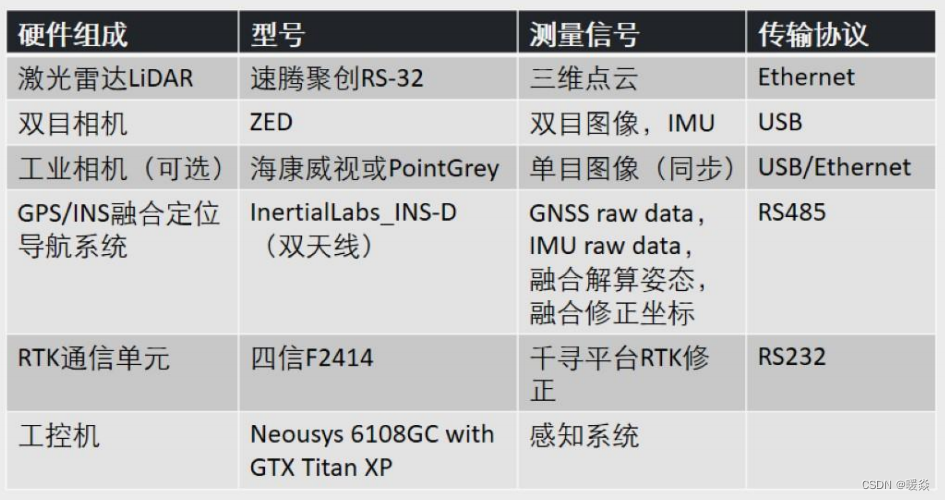
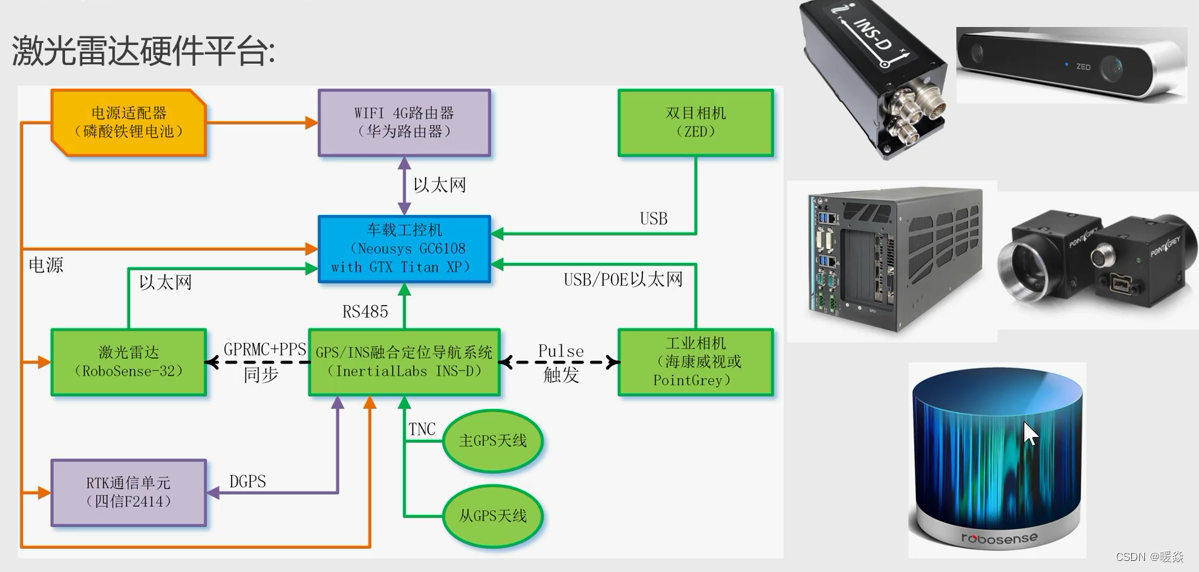
2.4 激光雷达系统方案


RS-LiDAR-16
RS-LIDAR-32B
GPS及惯导设备
IPC工控机
激光雷达安装支架(固定支架)
显示器
交换机
网线
多雷达模拟时间同步板
硬件部分
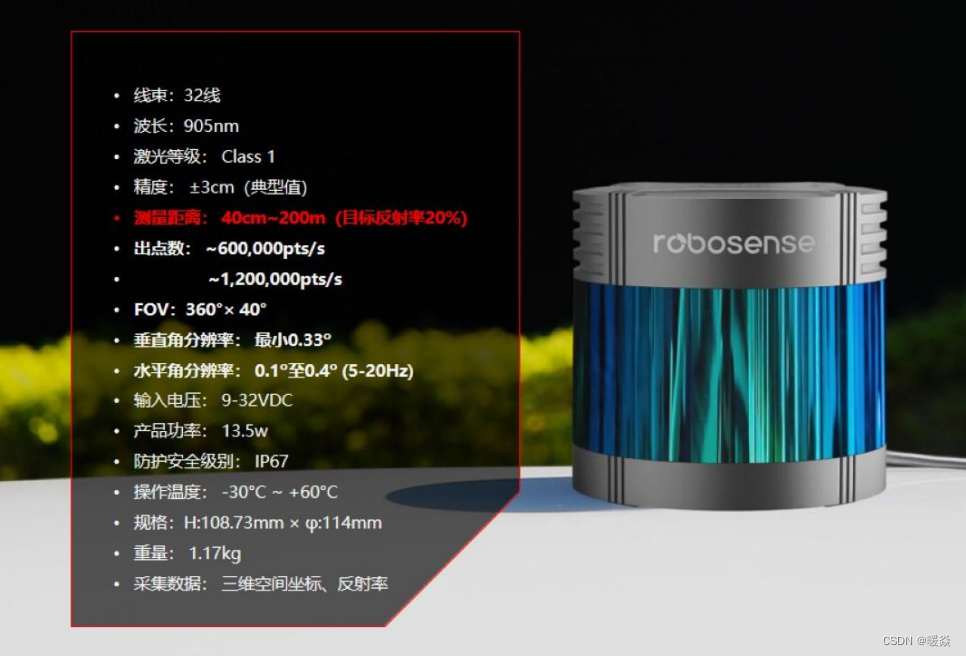

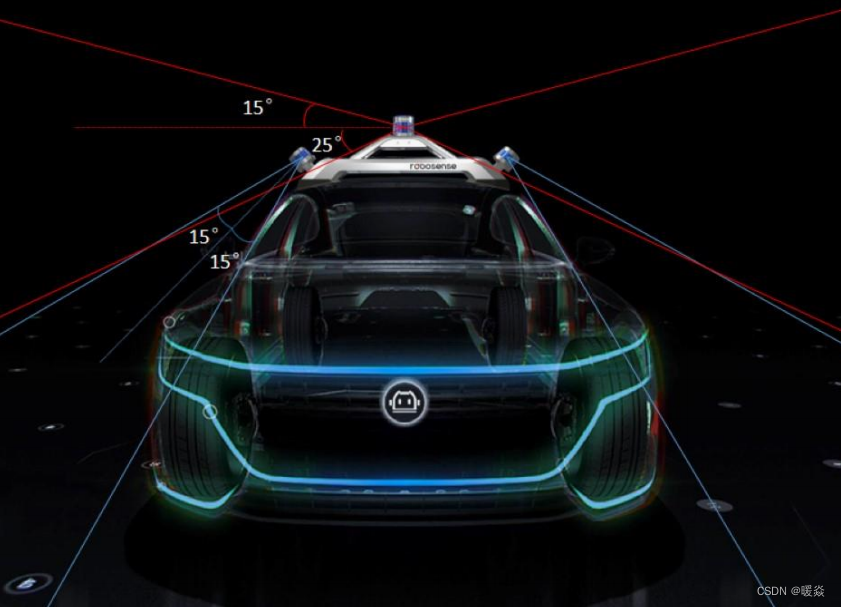
全方位感知(主雷达+近补雷达)

反射强度
抗干扰
抗多雷达对射干扰
抗强光干扰
多传感器融合
多传感器标定
时间同步
保证多个雷达的时间处于同一个时间计时标准(不进行时间同步时,每个雷达以启动时刻计时,使用自身内部独立的计时系统)。
外部时间源: GPS或网络时间源。
时间输入:
GPS通过UART接入雷达,发送GPRMC消息;PPS通过IO接入雷达,发送1 PPS脉冲信号。
网络时间通过以太网UDP指令发送时间,进行同步。
空间同步
保证所有的雷达数据转换到一个统一的坐标系下(不同雷达扫描到的同一个目标具有同样的坐标位置)
统一坐标系
选择位置最核心的一个雷达的坐标系作为雷达耦合的统一坐标系(理论上可以选择任意坐标系作为统一坐标系)
空间位置标定
平移量 – (x.y.z)
旋转量–(roll,pitch,yaw)
(平移量可以通过测量安装距离来标定初值,且有些安装方式是无法直接测距的,但是旋转量无法测量。)
软件部分

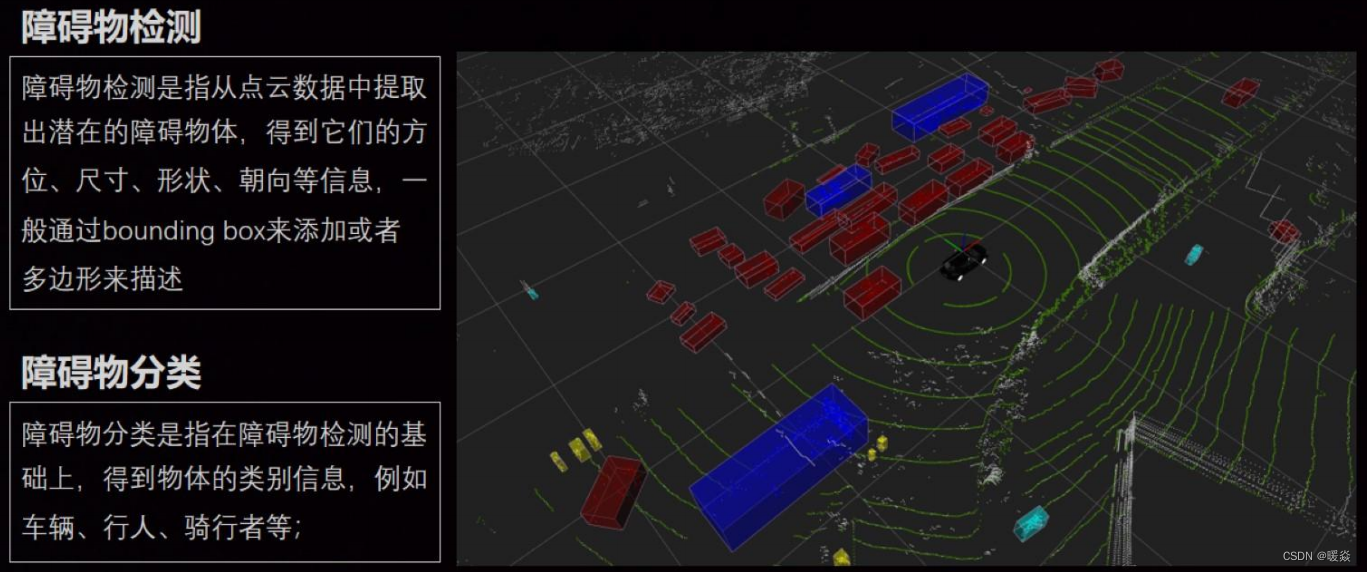
障碍物检测
障碍物检测是指从点云数据中提取出潜在的障碍物体,得到它们的方位、尺寸、形状、朝向等信息,
般通过bounding box来添加或者多边形来描述。
障碍物分类
障碍物分类是指在障碍物检测的基础上,得到物体的类别信息,例如车辆、行人、骑行者等。
运动物体跟踪
运动物体跟踪是指估计运动物体的运动状态,包括运动方向、速度大小、加速度、角速度、运动轨迹等
信息。
可行驶区域检测
可行驶区域检测是指在场景中分割出可以行驶的区域,根据不同的场景要求,相关的任务有路沿检测、车道线检测、地面检测、路面检测等任务。
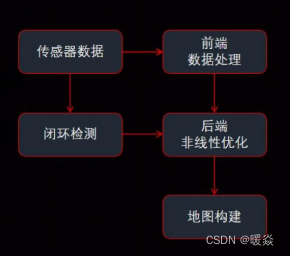
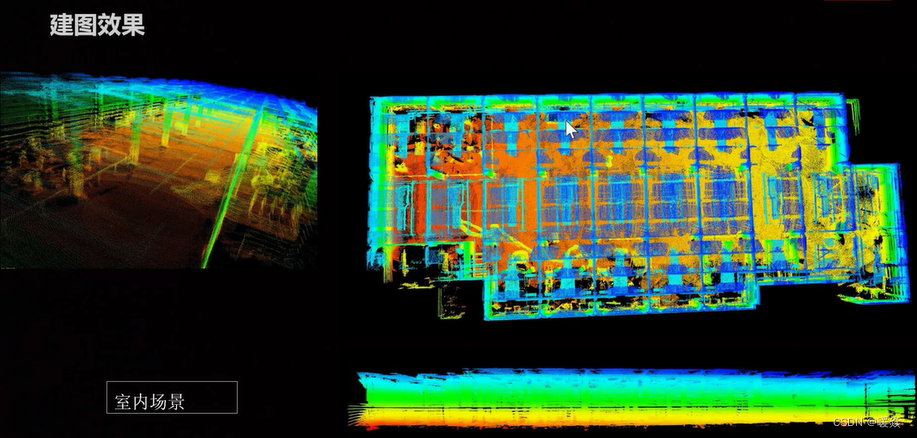
SLAM建图
建图算法的挑战:
精度高满足定位算法厘米级需求;
大场景稳定性高,精度不随地图增大而降低;
人工干预少,重复精度高;

重定位
定位场景展示:
小型移动机器人
特点:
经常发生灵活机动
角速度较大
视角比较低
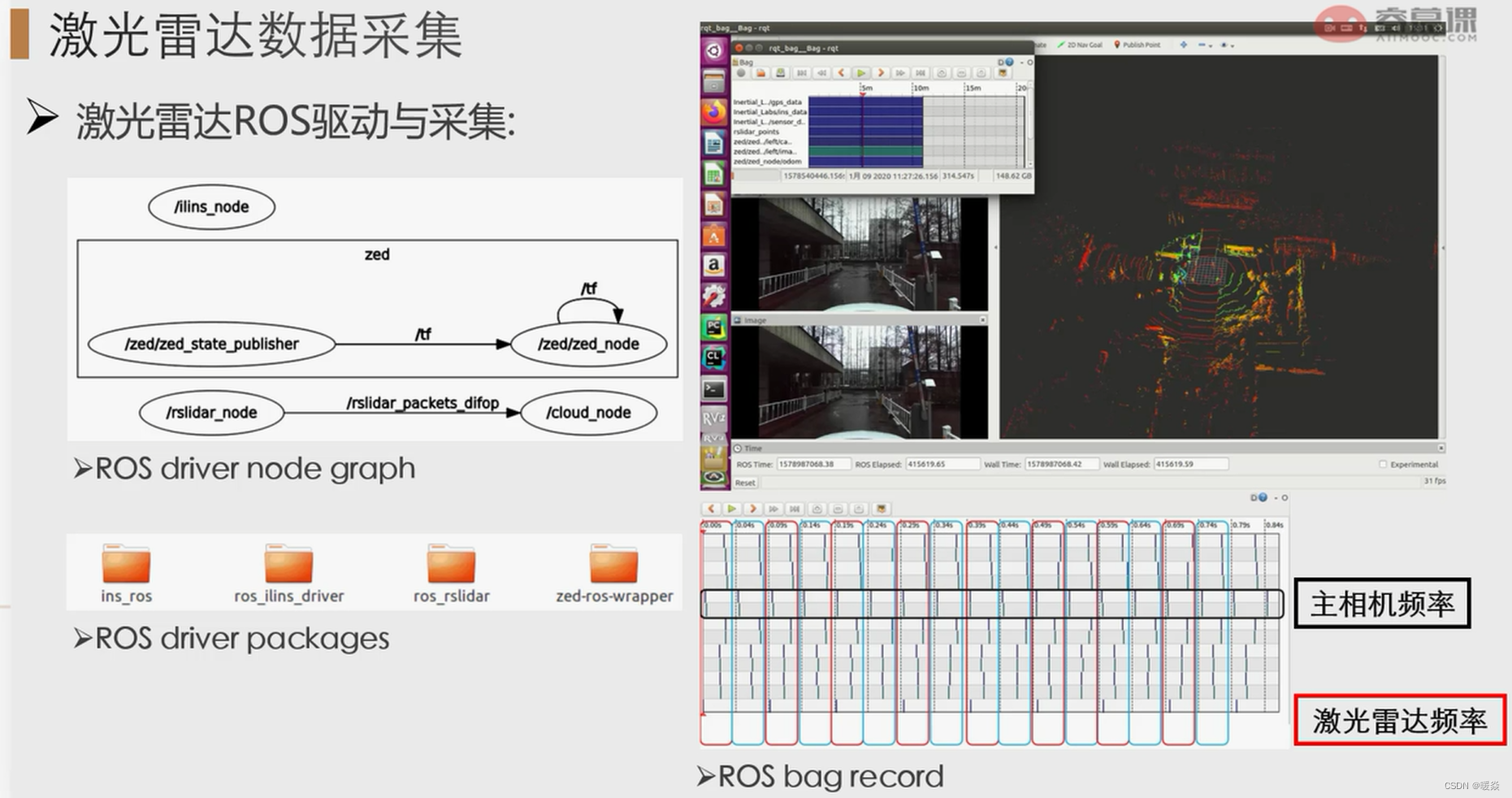
3 激光雷达数据采集

4 ROS编程基础
相关文章:
【三维点云】01-激光雷达原理与应用
文章目录内容概要1 激光雷达原理1.1 什么是激光雷达?1.2 激光雷达原理1.3 激光雷达分类三角法TOF法脉冲间隔测量法幅度调制的相位测量法相干法激光雷达用途2 激光雷达安装、标定与同步2.1 激光雷达安装方式考虑因素2.2 激光雷达点云用途2.3 数据融合多激光雷达数据融…...

自动驾驶感知——物体检测与跟踪算法|4D毫米波雷达
文章目录1. 物体检测与跟踪算法1.1 DBSCAN1.2 卡尔曼滤波2. 毫米波雷达公开数据库的未来发展方向3. 4D毫米波雷达特点及发展趋势3.1 4D毫米波雷达特点3.1.1 FMCW雷达角度分辨率3.1.2 MIMO ( Multiple Input Multiple Output)技术3.2 4D毫米波雷达发展趋势3.2.1 芯片级联3.2.2 专…...

C语言(内联函数(C99)和_Noreturn)
1.内联函数 通常,函数调用都有一定的开销,因为函数的调用过程包含建立调用,传递参数,跳转到函数代码并返回。而使用宏是代码内联,可以避开这样的开销。 内联函数:使用内联diamagnetic代替函数调用。把函数…...
理解与tensorflow2.0 代码实现 附完整代码)
图卷积神经网络(GCN)理解与tensorflow2.0 代码实现 附完整代码
图(Graph),一般用 $G=(V,E)$ 表示,这里的$V$是图中节点的集合,$E$ 为边的集合,节点的个数用$N$表示。在一个图中,有三个比较重要的矩阵: 特征矩阵$X$:维度为 $N\times D$ ,表示图中有 N 个节点,每个节点的特征个数是 D。邻居矩阵$A$:维度为 $N\times N$ ,表示图中 N…...
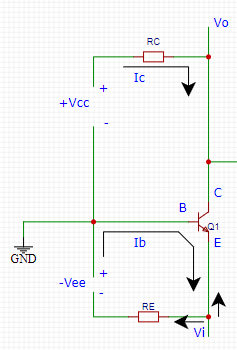
模电学习6. 常用的三极管放大电路
模电学习6. 常用的三极管放大电路一、判断三极管的工作状态1. 正偏与反偏的概念2. 工作状态的简单判断二、三种重要的放大电路1. 共射电路2. 共集电极放大电路3. 共基极放大电路一、判断三极管的工作状态 1. 正偏与反偏的概念 晶体管分P区和N区, 当P区电压大于N区…...
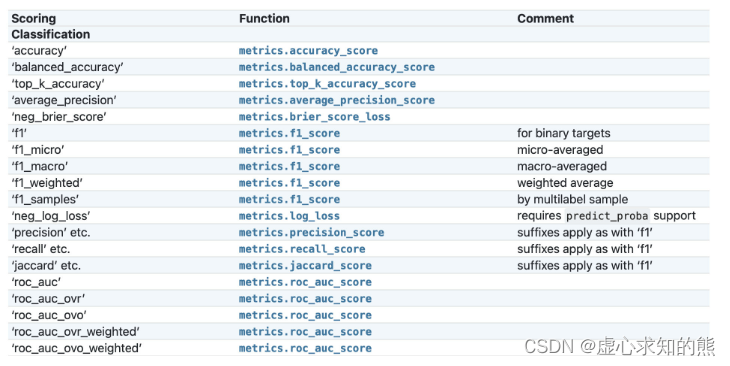
Lesson 6.6 多分类评估指标的 macro 和 weighted 过程 Lesson 6.7 GridSearchCV 的进阶使用方法
文章目录一、多分类评估指标的 macro 和 weighted 过程1. 多分类 F1-Score 评估指标2. 多分类 ROC-AUC 评估指标二、借助机器学习流构建全域参数搜索空间三、优化评估指标选取1. 高级评估指标的选用方法2. 同时输入多组评估指标四、优化后建模流程在正式讨论关于网格搜索的进阶…...
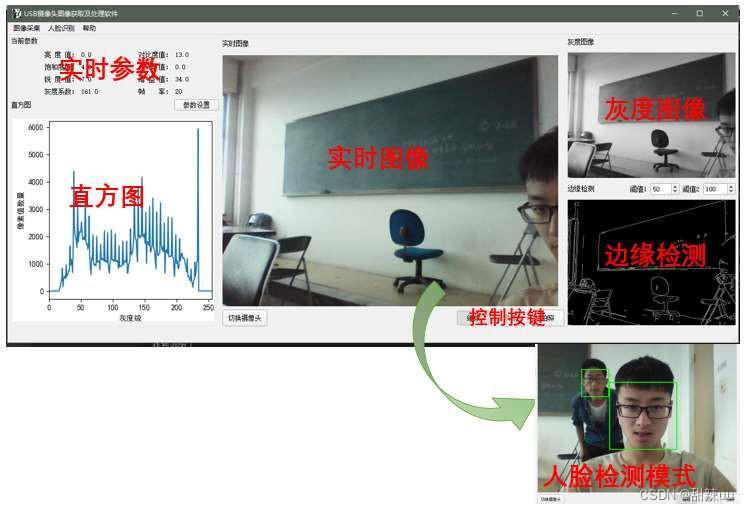
基于 Python 实时图像获取及处理软件图像获取;图像处理;人脸识别设计 计算机毕设 附完整代码+论文 +报告
界面结果:图像获取;图像处理;人脸识别 程序结构设计 图形用户界面设计与程序结构设计是互为表里的。或者说,程序结构设计是软件设计最本质、最核心的内容。徒有界面而内部逻辑结构混乱的软件一无是处。 Windows 操作系统是一款图形化的操作系统,相比于早期的计算机使用的命…...
前后端RSA互相加解密、加签验签、密钥对生成(Java)
目录一、序言二、关于PKCS#1和PKCS#8格式密钥1、简介2、区别二、关于JSEncrypt三、关于jsrsasign四、前端RSA加解密、加验签示例1、相关依赖2、cryptoUtils工具类封装3、测试用例五、Java后端RSA加解密、加验签1、CryptoUtils工具类封装2、测试用例六、前后端加解密、加验签交互…...

基于Java+SpringBoot+Vue前后端分离学生宿舍管理系统设计与实现
博主介绍:✌全网粉丝3W,全栈开发工程师,从事多年软件开发,在大厂呆过。持有软件中级、六级等证书。可提供微服务项目搭建、毕业项目实战、项目定制✌ 博主作品:《微服务实战》专栏是本人的实战经验总结,《S…...
)
前端高频面试题—JavaScript篇(二)
💻前端高频面试题—JavaScript篇(二) 🏠专栏:前端面试题 👀个人主页:繁星学编程🍁 🧑个人简介:一个不断提高自我的平凡人🚀 🔊分享方向…...
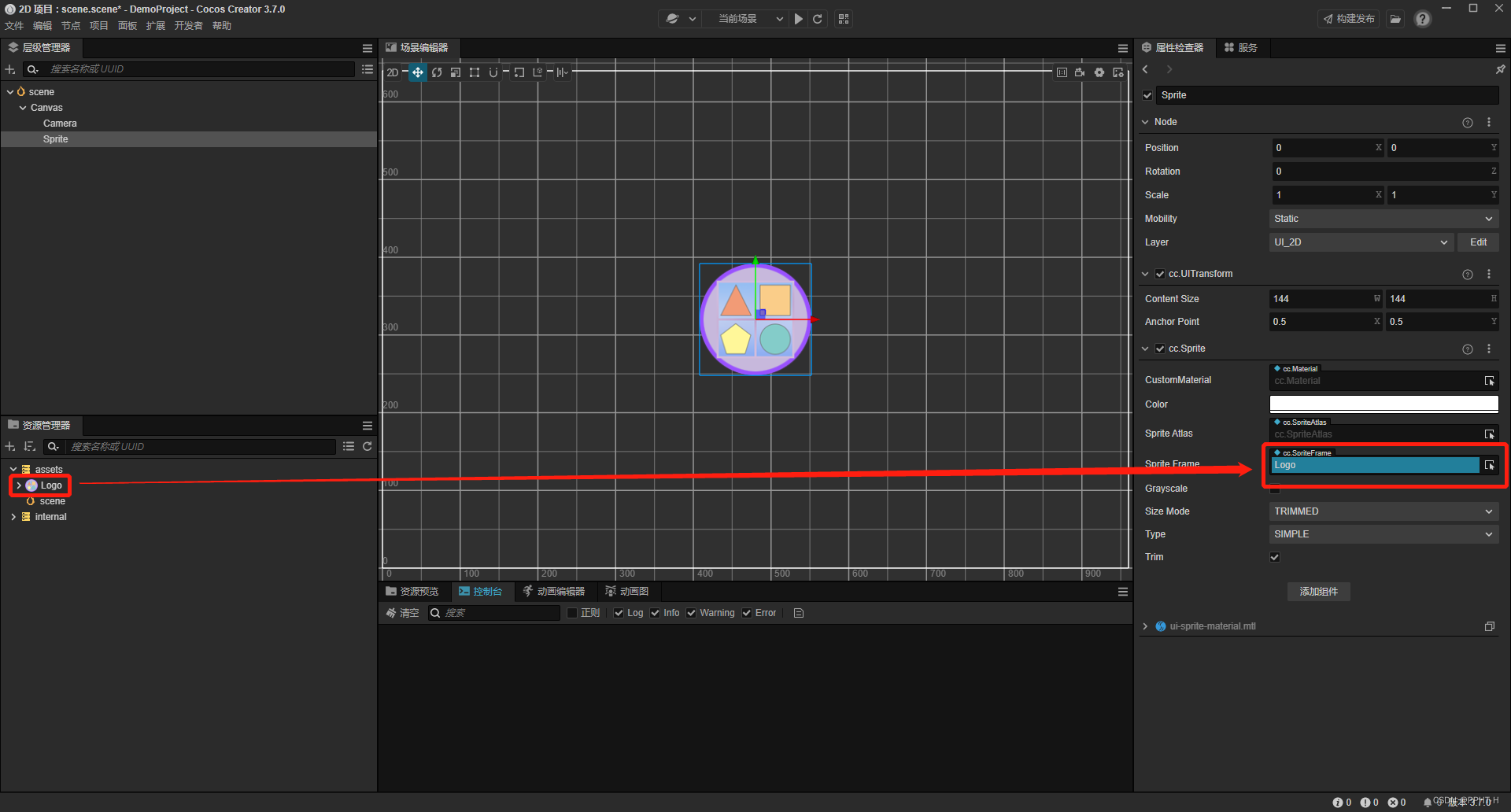
【微信小游戏开发笔记】第二节:Cocos开发界面常用功能简介
Cocos开发界面常用功能简介 本章只介绍微信小游戏开发时常用的功能,其他功能不常用,写多了记不住(其实是懒 -_-!): 层级管理器,用于操作各个节点。资源管理器,用于操作各种文件资源。场景编辑…...

3分钟,学会了一个调试CSS的小妙招
Ⅰ. 作用 用于调试CSS , 比控制台添更加方便,不需要寻找 ;边添加样式,边可以查看效果,适合初学者对CSS 的理解和学习; Ⅱ. 快速实现(两边) ① 显示这个样式眶 给 head 和 style 标签添加一个…...

【项目精选】基于jsp的健身俱乐部会员系统
点击下载源码 社会可行性 随着社会的发展和计算机技术的进步,人类越来越依赖于信息化的管理系统,这种系统能更加方便的获得信息以及处理信息。人们都改变了过去的思维,开始走向了互联网的时代,在 可行性小结 本章在技术可行性上…...

java注解
1. Java注解(Annotation) 2. Java注解分类 3. JDK基本注解 4. JDK元注解 5. 注解分类 6. 自定义注解开发 7. 提取Annotation信息 8. 注解处理器 9. 动态注解处理器(spring aop方式) 1. Java注解(Annotation) Java注解是附加在代码中的一些元信息,用于…...

移动测试相关
一、环境搭建 准备工作: (python、pycharm安装配置好) 1、Java SDK 安装配置 Java Downloads | Oracle 下载安装后配置系统环境变量:JAVA_HOME(jdk根目录路径)和path(jdk根目录下的bin目录路径…...
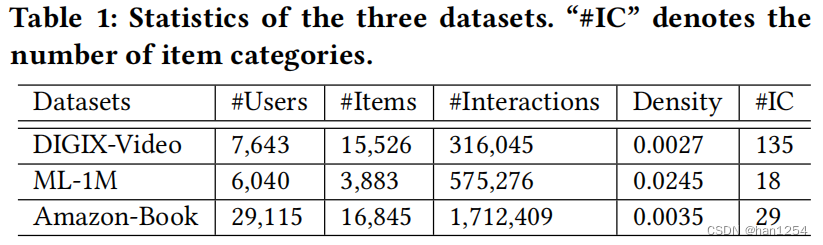
SIGIR22:User-controllable Recommendation Against Filter Bubbles
User-controllable Recommendation Against Filter Bubbles 摘要 推荐系统经常面临过滤气泡的问题:过度推荐基于用户特征以及历史交互的同质化项目。过滤气泡将会随着反馈循环增长,缩小了用户兴趣。现有的工作通常通过纳入诸如多样性和公平性等准确性之…...
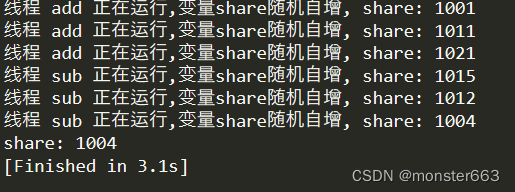
Python中的进程线程
文章目录前言多进程与多线程基本概念多进程multiprocessing 类对象进程池subprocess模块进程间通信多线程threading实现线程操作线程共享所有变量线程锁参考资料前言 又花了点时间学习了一下Python中的多线程与多进程的知识点,梳理一下供复习参考 多进程与多线程 …...

python(8):使用conda update更新conda后,anaconda所有环境崩溃----问题没有解决,不要轻易更新conda
文章目录0. 教训1. 问题:使用conda update更新conda后,anaconda所有环境崩溃1.1 问题描述1.2 我搜索到的全网最相关的问题----也没有解决3 尝试流程记录3.1 重新安装pip3.2 解决anaconda编译问题----没成功0. 教训 (1) 不要轻易使用conda update更新conda----我遇到…...

c++11 标准模板(STL)(std::multimap)(四)
定义于头文件 <map> template< class Key, class T, class Compare std::less<Key>, class Allocator std::allocator<std::pair<const Key, T> > > class multimap;(1)namespace pmr { template <class Key, class T…...

乐观锁及悲观锁
目录 1.乐观锁 (1).定义 (2).大体流程 (3).实现 (4).总结 2.悲观锁 (1).定义 (2).大体流程 (3).实现 (4).缺点 (5).总结 1.乐观锁 (1).定义 乐观锁在操作数据时非常乐观,认为别的线程不会同时修改数据所以不会上锁,但是在更新的时候会判断一…...

浅谈 React Hooks
React Hooks 是 React 16.8 引入的一组 API,用于在函数组件中使用 state 和其他 React 特性(例如生命周期方法、context 等)。Hooks 通过简洁的函数接口,解决了状态与 UI 的高度解耦,通过函数式编程范式实现更灵活 Rea…...

R语言AI模型部署方案:精准离线运行详解
R语言AI模型部署方案:精准离线运行详解 一、项目概述 本文将构建一个完整的R语言AI部署解决方案,实现鸢尾花分类模型的训练、保存、离线部署和预测功能。核心特点: 100%离线运行能力自包含环境依赖生产级错误处理跨平台兼容性模型版本管理# 文件结构说明 Iris_AI_Deployme…...

MongoDB学习和应用(高效的非关系型数据库)
一丶 MongoDB简介 对于社交类软件的功能,我们需要对它的功能特点进行分析: 数据量会随着用户数增大而增大读多写少价值较低非好友看不到其动态信息地理位置的查询… 针对以上特点进行分析各大存储工具: mysql:关系型数据库&am…...

使用van-uploader 的UI组件,结合vue2如何实现图片上传组件的封装
以下是基于 vant-ui(适配 Vue2 版本 )实现截图中照片上传预览、删除功能,并封装成可复用组件的完整代码,包含样式和逻辑实现,可直接在 Vue2 项目中使用: 1. 封装的图片上传组件 ImageUploader.vue <te…...
:爬虫完整流程)
Python爬虫(二):爬虫完整流程
爬虫完整流程详解(7大核心步骤实战技巧) 一、爬虫完整工作流程 以下是爬虫开发的完整流程,我将结合具体技术点和实战经验展开说明: 1. 目标分析与前期准备 网站技术分析: 使用浏览器开发者工具(F12&…...
)
【HarmonyOS 5 开发速记】如何获取用户信息(头像/昵称/手机号)
1.获取 authorizationCode: 2.利用 authorizationCode 获取 accessToken:文档中心 3.获取手机:文档中心 4.获取昵称头像:文档中心 首先创建 request 若要获取手机号,scope必填 phone,permissions 必填 …...
Springboot社区养老保险系统小程序
一、前言 随着我国经济迅速发展,人们对手机的需求越来越大,各种手机软件也都在被广泛应用,但是对于手机进行数据信息管理,对于手机的各种软件也是备受用户的喜爱,社区养老保险系统小程序被用户普遍使用,为方…...

HTML前端开发:JavaScript 获取元素方法详解
作为前端开发者,高效获取 DOM 元素是必备技能。以下是 JS 中核心的获取元素方法,分为两大系列: 一、getElementBy... 系列 传统方法,直接通过 DOM 接口访问,返回动态集合(元素变化会实时更新)。…...

2025年全国I卷数学压轴题解答
第19题第3问: b b b 使得存在 t t t, 对于任意的 x x x, 5 cos x − cos ( 5 x t ) < b 5\cos x-\cos(5xt)<b 5cosx−cos(5xt)<b, 求 b b b 的最小值. 解: b b b 的最小值 b m i n min t max x g ( x , t ) b_{min}\min_{t} \max_{x} g(x,t) bmi…...
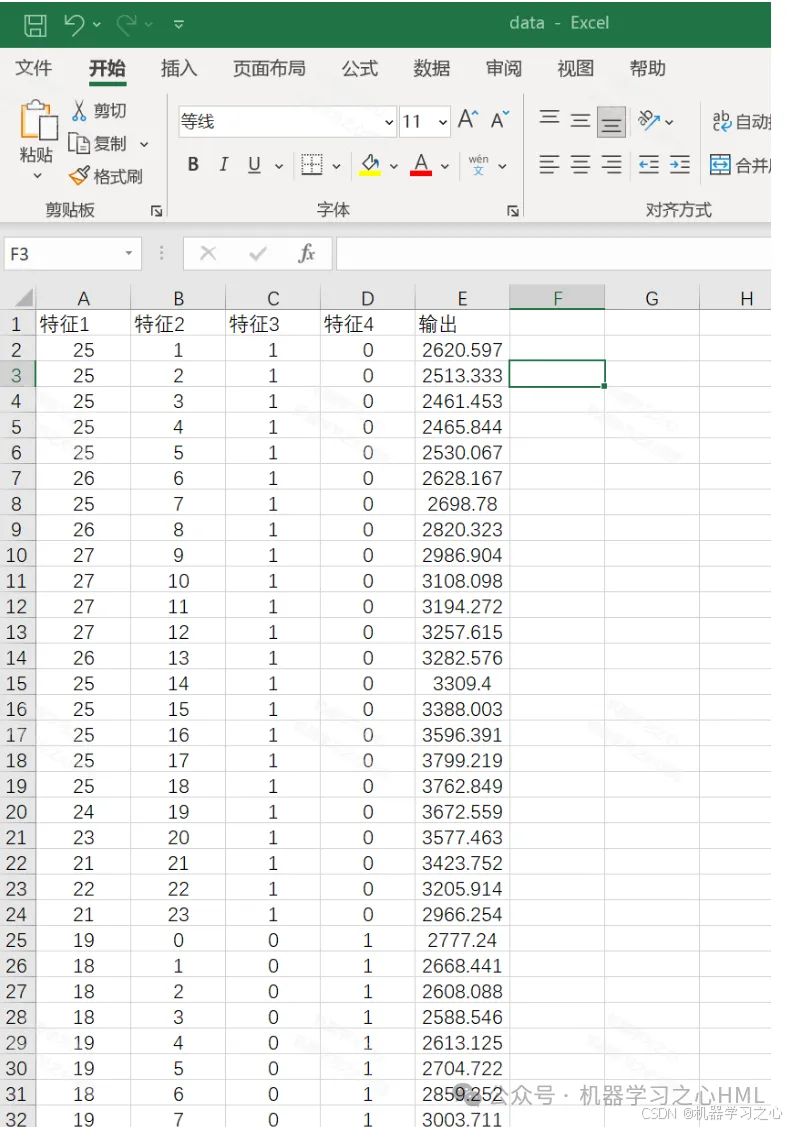
LSTM-XGBoost多变量时序预测(Matlab完整源码和数据)
LSTM-XGBoost多变量时序预测(Matlab完整源码和数据) 目录 LSTM-XGBoost多变量时序预测(Matlab完整源码和数据)效果一览基本介绍程序设计参考资料 效果一览 基本介绍 普通的多变量时序已经用腻了,审稿人也看烦了&#…...