机器人系统ros2-开发学习实践16-RViz 用户指南
RViz 是 ROS(Robot Operating System)中的一个强大的 3D
可视化工具,用于可视化机器人模型、传感器数据、路径规划等。以下是RViz用户指南,帮助你了解如何使用RViz来进行机器人开发和调试。
启动可视化工具
ros2 run rviz2 rviz2
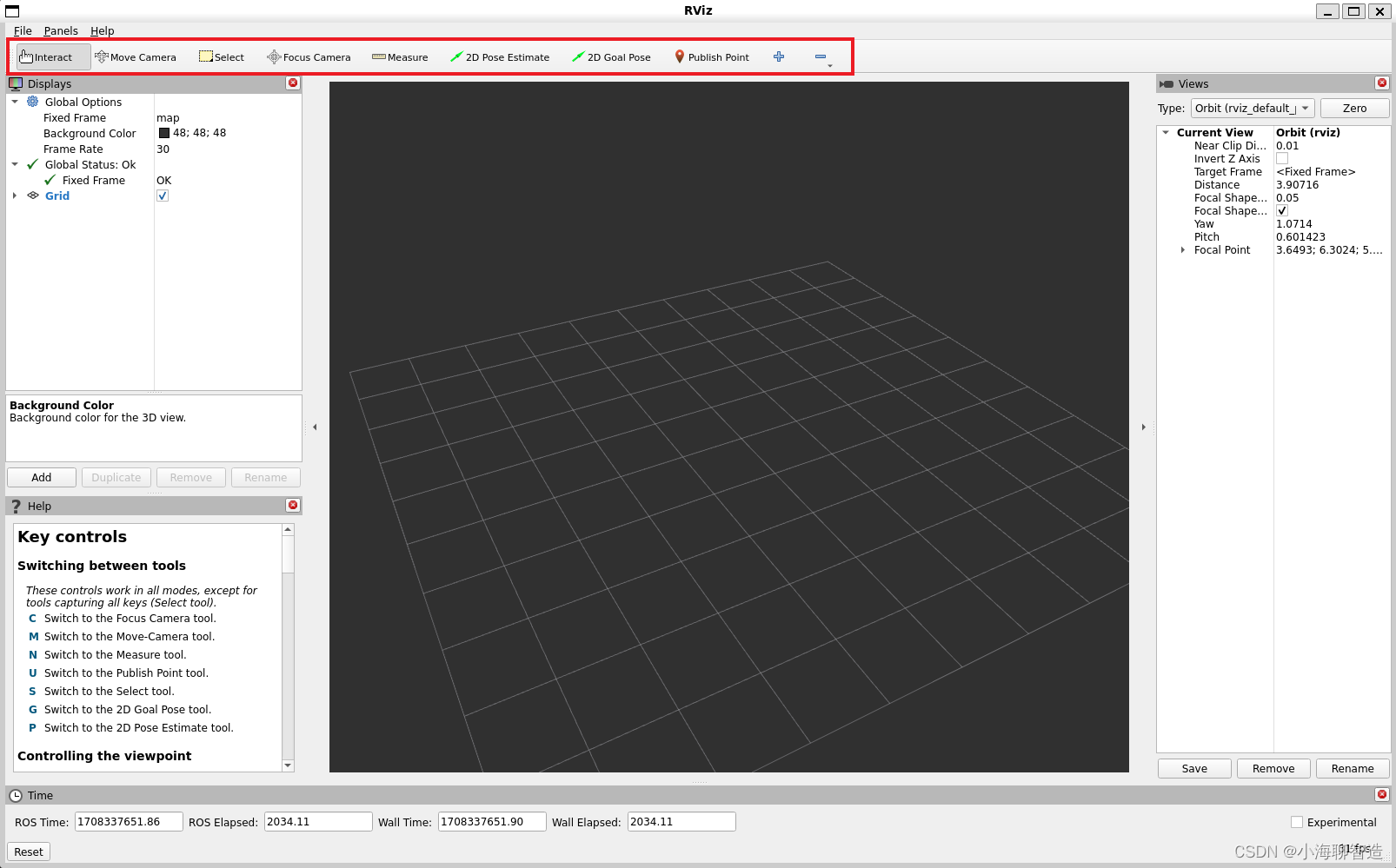
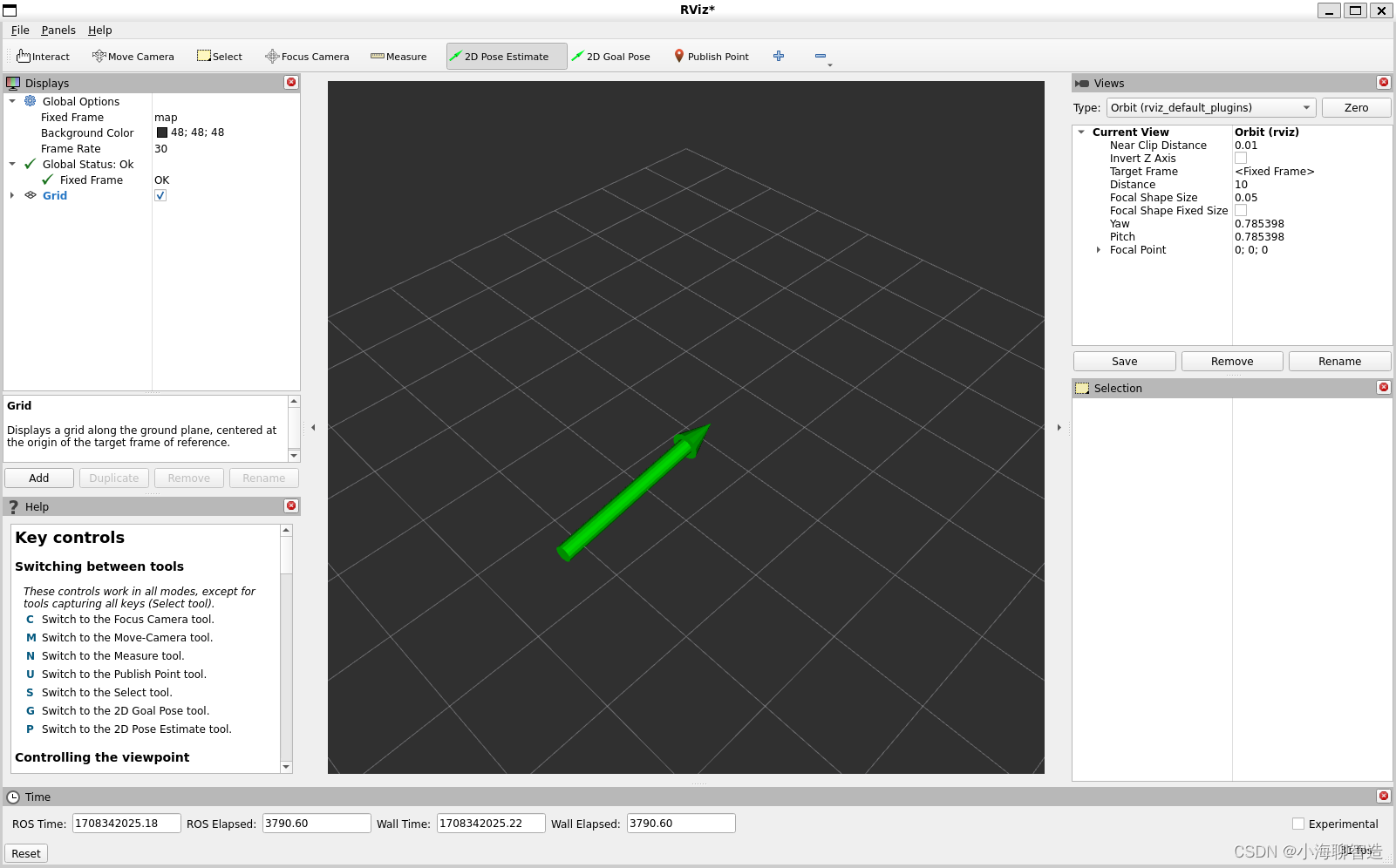
当 RViz 首次启动时,您将看到此窗口:

中间的大黑窗口是 3D 视图(因为什么都看不到所以是空的)。左边是显示列表,它会显示您已加载的所有显示。目前它只包含全局选项和网格,我们稍后会讲到。右边是其他一些面板,如下所述。
显示器
显示器是在 3D 世界中绘制某些内容的东西,并且可能在显示器列表中提供一些选项。例如点云、机器人状态等。
添加新显示器
要添加显示,请单击底部的添加按钮:

这将弹出新的显示对话框:

顶部的列表包含显示类型。类型详细说明了此显示将可视化哪种数据。中间的文本框提供了所选显示类型的描述。最后,您必须为显示指定一个唯一的名称。例如,如果您的机器人上有两个激光扫描仪,您可以创建两个名为“激光底座”和“激光头”的显示器。Laser Scan
显示属性
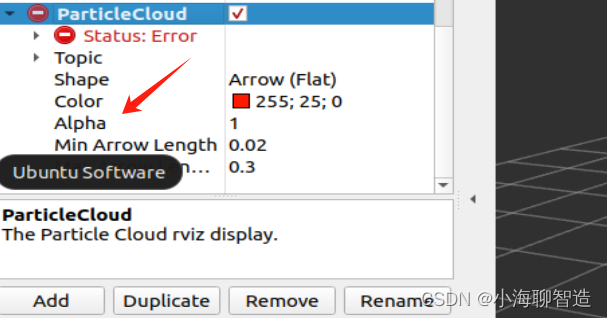
显示状态
每个显示都有自己的状态,以帮助您了解一切是否正常。状态可以是:OK、、或。状态在显示标题的背景颜色中指示,也可以在状态类别中看到,如果显示已展开,您可以查看Warning:ErrorDisabled
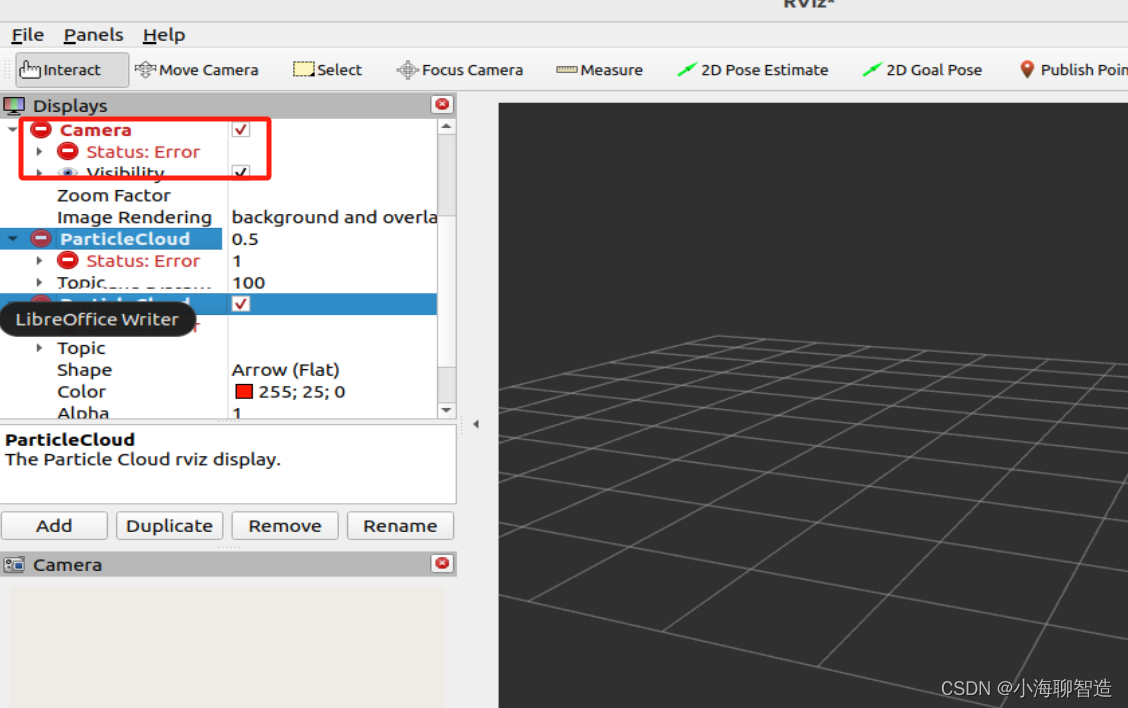
类别Status还扩展以显示特定状态信息。此信息对于不同的显示器是不同的,并且消息应该是不言自明的。
内置显示类型

配置
不同的显示器配置通常适用于可视化器的不同用途。例如,对完整 PR2 有用的配置不一定对测试车有用。为此,可视化器允许您加载和保存不同的配置。
配置包含:
-
显示器 + 其属性
-
工具属性
-
3D 可视化的视点和设置
视图面板
可视化器中有许多不同类型的相机可供选择。

相机类型包括不同的相机控制方式和不同类型的投影(正交与透视)。
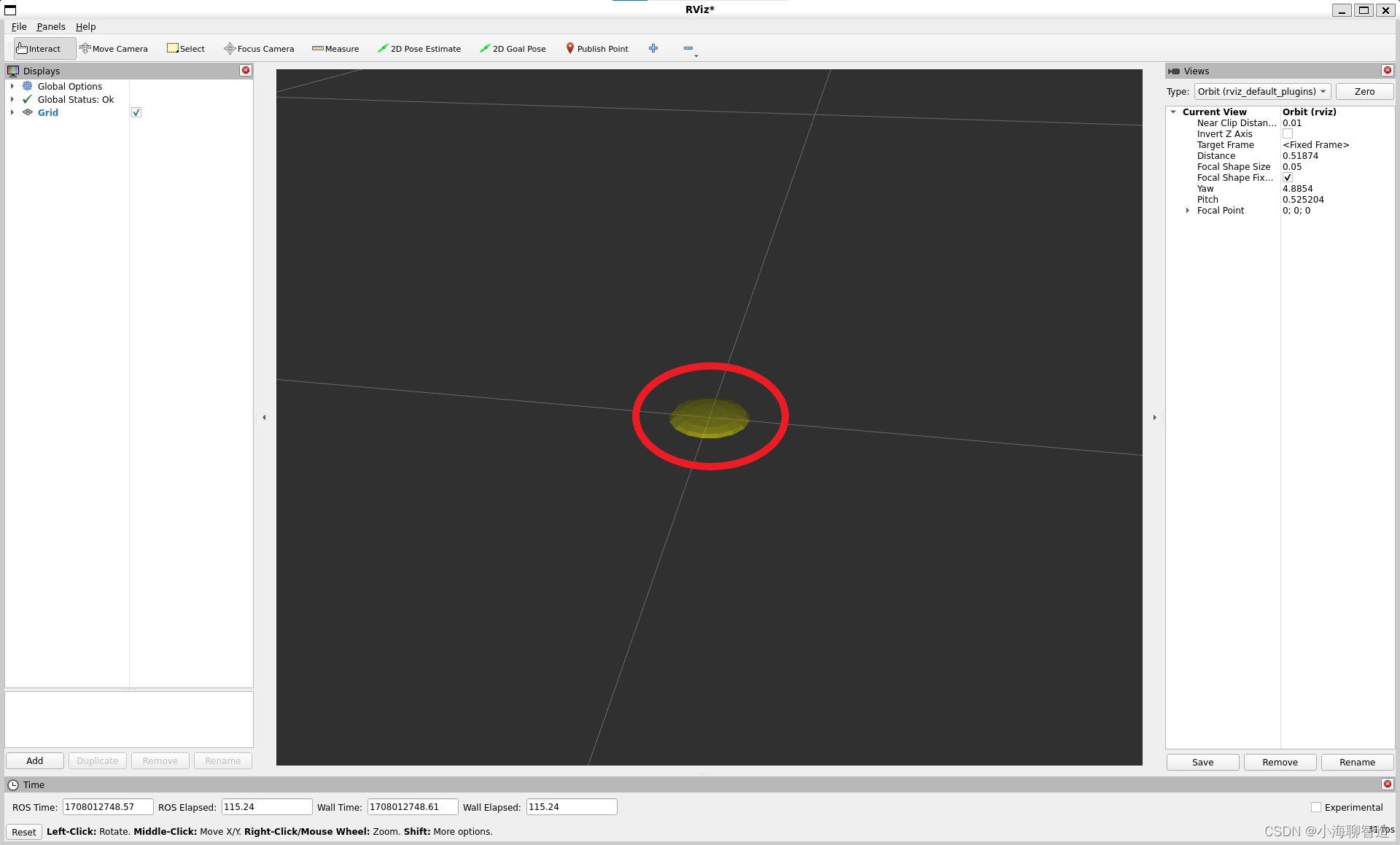
轨道相机(默认)
轨道摄像机只是围绕焦点旋转,同时始终注视该点。移动摄像机时,焦点会显示为一个小圆盘:
控制:
-
鼠标左键:单击并拖动以围绕焦点旋转。
-
鼠标中键:单击并拖动可在由相机的上和右向量形成的平面中移动焦点。移动的距离取决于焦点 - 如果焦点上有一个物体,并且您单击该物体的上方,该物体将停留在鼠标下方。
-
鼠标右键:单击并拖动以放大/缩小焦点。向上拖动放大,向下拖动缩小。
-
滚轮:放大/缩小焦点
FPS(第一人称)相机
FPS 相机是第一人称相机,因此它会旋转,就像您用头部看一样。
控制:
-
鼠标左键:单击并拖动以旋转。按住 Control 键并单击以拾取鼠标下方的对象并直接查看它。
-
鼠标中键:单击并拖动以沿着相机的上下矢量形成的平面移动。
-
鼠标右键:单击并拖动以沿相机的前向矢量移动。向上拖动向前移动,向下拖动向后移动。
-
滚轮:向前/向后移动。
自上而下的正交
自上而下的正交相机始终沿 Z 轴(在机器人框架中)向下看,并且是正交视图,这意味着物体不会随着距离变远而变小。
控制:
-
鼠标左键:单击并拖动以绕 Z 轴旋转。
-
鼠标中键:单击并拖动可沿 XY 平面移动相机。
-
鼠标右键:单击并拖动以放大图像。
-
滚轮:缩放图像。
XY 轨道
与轨道相机相同,焦点限制在 XY 平面内。
控制:
- 参见轨道相机。
第三人称跟随者
相机保持朝向目标框架的恒定视角。与 XY 轨道相反,如果目标框架偏航,相机就会转动。例如,如果您正在对有角落的走廊进行 3D 映射,这可能会很方便。
控制:
- 参见轨道相机。
自定义视图
视图面板还允许您创建不同的命名视图,这些视图会被保存并可在其中切换。视图由目标框架、相机类型和相机姿势组成。您可以通过单击视图面板的“保存”按钮来保存视图。

配置选项解释
Current View:
当前选定的视图类型及其配置参数。以下是Orbit视图的具体参数说明:
- Near Clip Distance: 最近裁剪距离,表示相机能看到的最近距离。默认值为0.01。
- Invert Z Axis: 反转Z轴。选中此选项会使Z轴向下。
- Target Frame: 目标框架,视图将相对于该框架进行渲染。通常设置为。
- Distance: 相机与焦点之间的距离。默认值为10。
- Focal Shape Size: 焦点形状的大小。默认值为0.05。
- Focal Shape Fixed Size: 焦点形状固定大小。选中此选项将使焦点形状始终保持相同大小。
- Yaw: 水平旋转角度,表示绕垂直轴的旋转。
- Pitch: 垂直旋转角度,表示绕水平轴的旋转。
- Focal Point: 焦点坐标,表示相机将围绕的中心点。默认值为0; 0; 0。
坐标系
RViz 使用 tf 变换系统将数据从其到达的坐标系转换为全局参考系。在可视化工具中,有两个坐标系很重要,即目标坐标系和固定坐标系。
固定框架
这两个框架中最重要的是固定框架。固定框架是用来表示框架的参考框架world。这通常是map、 或world或类似的东西,但也可以是,例如,你的里程计框架。
如果错误地将固定框架设置为机器人的底座,那么机器人曾经见过的所有物体都会出现在机器人前方,位于相对于检测到它们的机器人的位置。为了获得正确的结果,固定框架不应相对于世界移动。
如果改变固定框架,所有当前显示的数据都会被清除,而不是重新转换。
目标框架
目标坐标系是相机视图的参考坐标系。例如,如果您的目标坐标系是地图,您将看到机器人在地图上行驶。如果您的目标坐标系是机器人的底座,机器人将保持在同一位置,而其他所有物体都相对于它移动。
工具
可视化工具的工具栏上有许多工具可供使用。以下部分将简要介绍这些工具。您可以在“帮助”->“显示帮助面板”下找到更多信息。
2D 姿态估计
此工具可让您设置初始姿势以播种定位系统(在initialposeROS 主题上发送)。单击地面上的某个位置并拖动以选择方向。可以在面板中更改输出主题。Tool Properties
此工具与导航堆栈配合使用。
键盘快捷键:p
2D 导航目标
此工具可让您设置 ROS 主题上发送的目标goal_pose。单击地面上的某个位置并拖动以选择方向。可以在面板中更改输出主题。Tool Properties
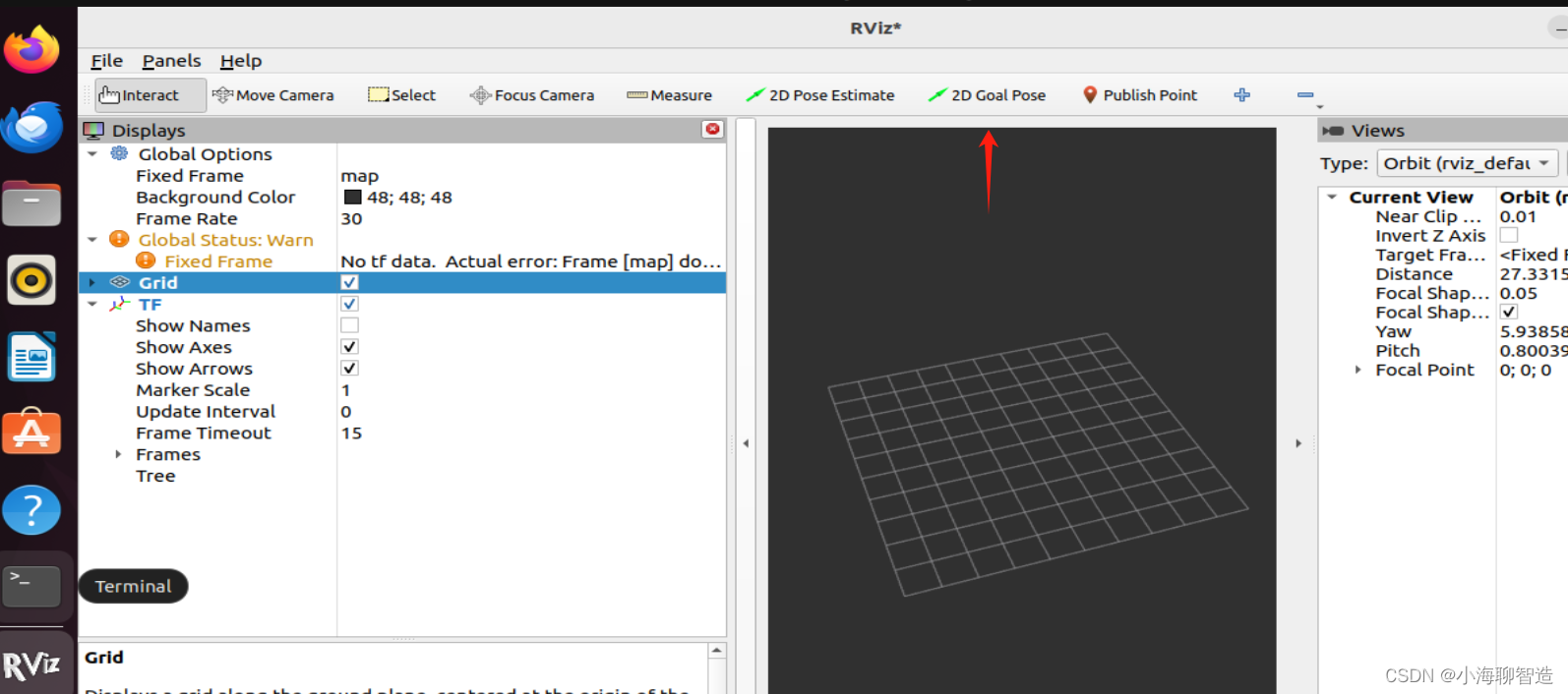
此工具与导航堆栈配合使用。
键盘快捷键:g
发布点
发布点工具可让您在可视化工具中选择一个对象,然后该工具将根据框架发布该点的坐标。结果显示在底部,就像测量工具一样,但也发布在主题上clicked_point。
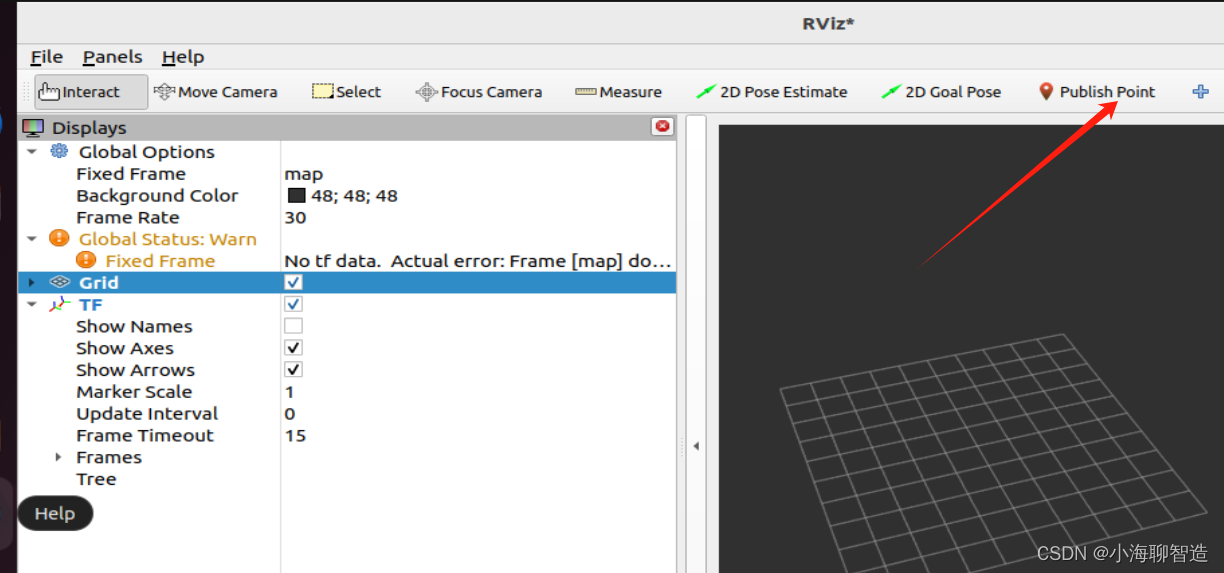
键盘快捷键:u
时间
在模拟器中运行时,“时间”面板非常有用,因为它允许您查看已过去的 ROS 时间,以及已过去的(即实际)时间。时间面板还允许您重置可视化工具的内部时间状态,这将重置所有显示以及 tf 的内部数据缓存。Wall Clock
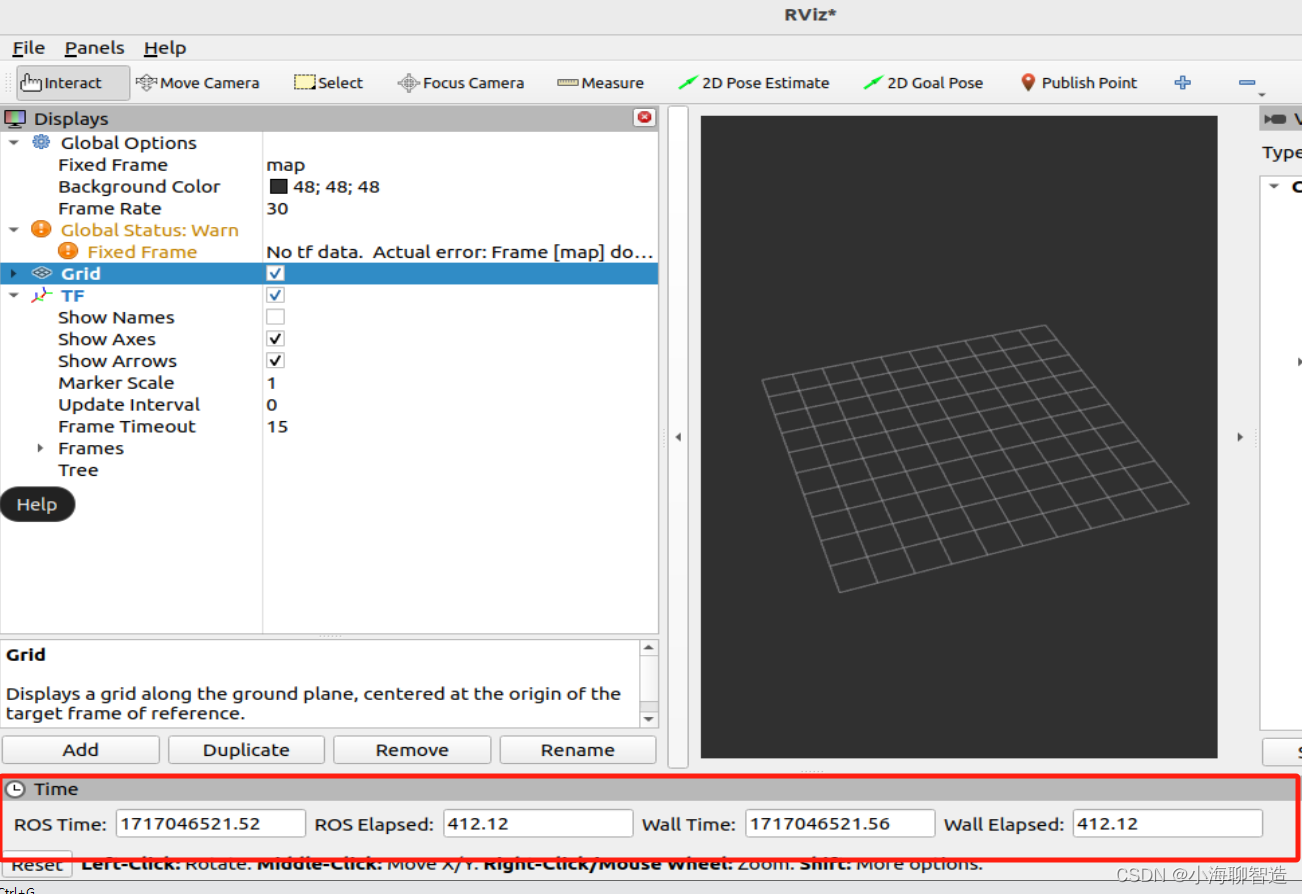
如果您没有在模拟中运行,时间面板几乎毫无用处。在大多数情况下,它可以关闭,您可能甚至不会注意到(除了为 rviz
的其余部分留出更多的屏幕空间)。
相关文章:
机器人系统ros2-开发学习实践16-RViz 用户指南
RViz 是 ROS(Robot Operating System)中的一个强大的 3D 可视化工具,用于可视化机器人模型、传感器数据、路径规划等。以下是RViz用户指南,帮助你了解如何使用RViz来进行机器人开发和调试。 启动可视化工具 ros2 run rviz2 rviz2…...
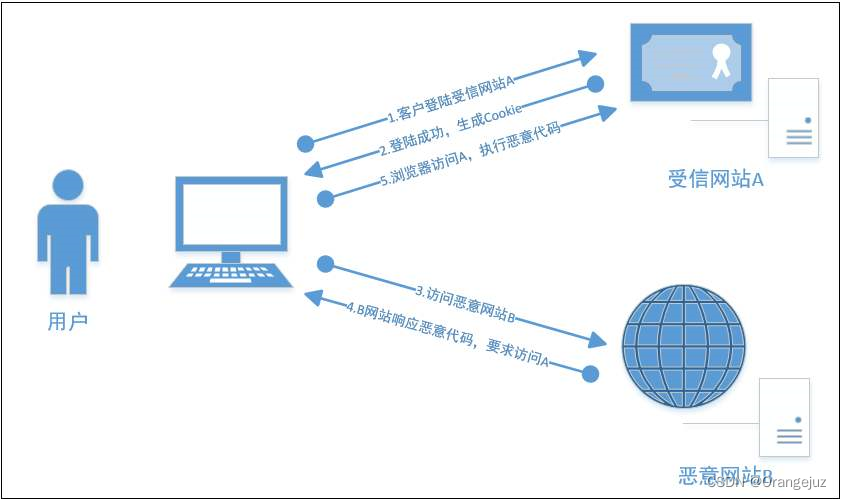
安全测试 之 安全漏洞 CSRF
1. 背景 安全测试是在功能测试的基础上进行的,它验证软件的安全需求,确保产品在遭受恶意攻击时仍能正常运行,并保护用户信息不受侵犯。 2. CSRF 定义 CSRF(Cross-Site Request Forgery),中文名为“跨站请…...

交易中的预测和跟随
任何的交易决策,一定是基于某种推理关系的,这种推理关系是基于t时刻之前的状态,得到t时刻之后的结果,我们基于这种推理关系,根据当前的状态,形成了未来结果的某种预期,然后基于这种预期采取相应…...

vs2022专业版永久密钥
vs2022专业版永久密钥: vs2022专业版永久密钥: Visual Studio 2022 Enterprise:VHF9H-NXBBB-638P6-6JHCY-88JWH Visual Studio 2022 Professional:TD244-P4NB7-YQ6XK-Y8MMM-YWV2J...
MongoDB环境搭建
一.下载安装包 Download MongoDB Community Server | MongoDB 二、双击下载完成后的安装包开始安装,除了以下两个部分需要注意操作,其他直接next就行 三.可视化界面安装 下载MongoDB-compass,地址如下 MongoDB Compass Download (GUI) | M…...

数据结构【队列】
队列的的概念 队列是一种特殊的线性表,特殊之处在于它只允许在表的头部进行删除操作,而在表的尾部进行插入操作,和栈一样,队列是一种操作受限制的线性表。进行插入操作的端称为队尾,进行删除操作的端称为队头。队列中…...
微信小程序上架,AI类目审核(AI问答、AI绘画、AI换脸)
小程序对于生成式AI类目的产品上架审核较为严格,这也是近两年新增了几个类目,一旦小程序中涉及生成式AI相关的内容,如果你选择相应类目,但审核被划归为这一类,都需要准备此类目的审核,才能正常上架。 如果…...

Vue3学习记录(第一天)
Vue3学习记录_第一天 背景说明记录Vue3实现响应式前端的反射前端对象的属性赋值Vue3响应式实现过程稿前端移除对象的属性 背景 本次学习主要是看视频学习, 没有跟练, 但是很多知识点感觉又容易忘记. 所以通过笔记的方式输出一下. 说明 估计只能自己看懂, 如果能提供一些其他…...
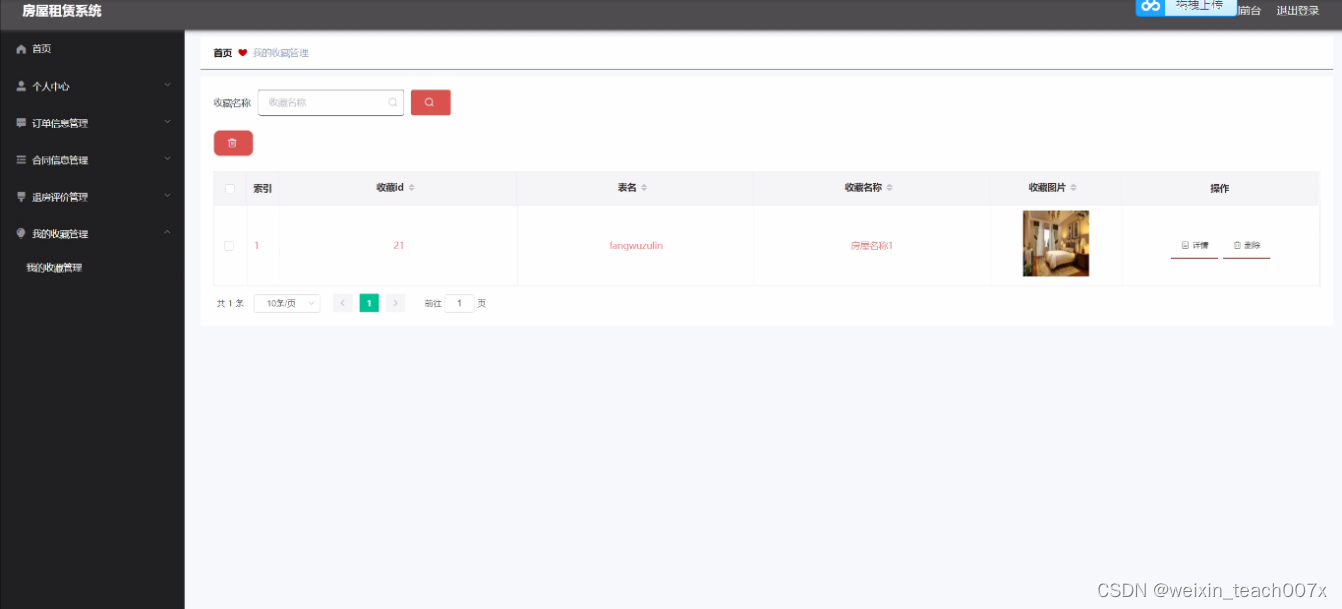
springboot+vue+mybatis房屋租贷系统+PPT+论文+讲解+售后
本论文系统地描绘了整个网上房屋租赁系统的设计与实现,主要实现的功能有以下几点:管理员;首页、个人中心、房屋类型管理、房屋租赁管理、会员管理、订单信息管理、合同信息管理、退房评价管理、管理员管理,系统管理,前…...
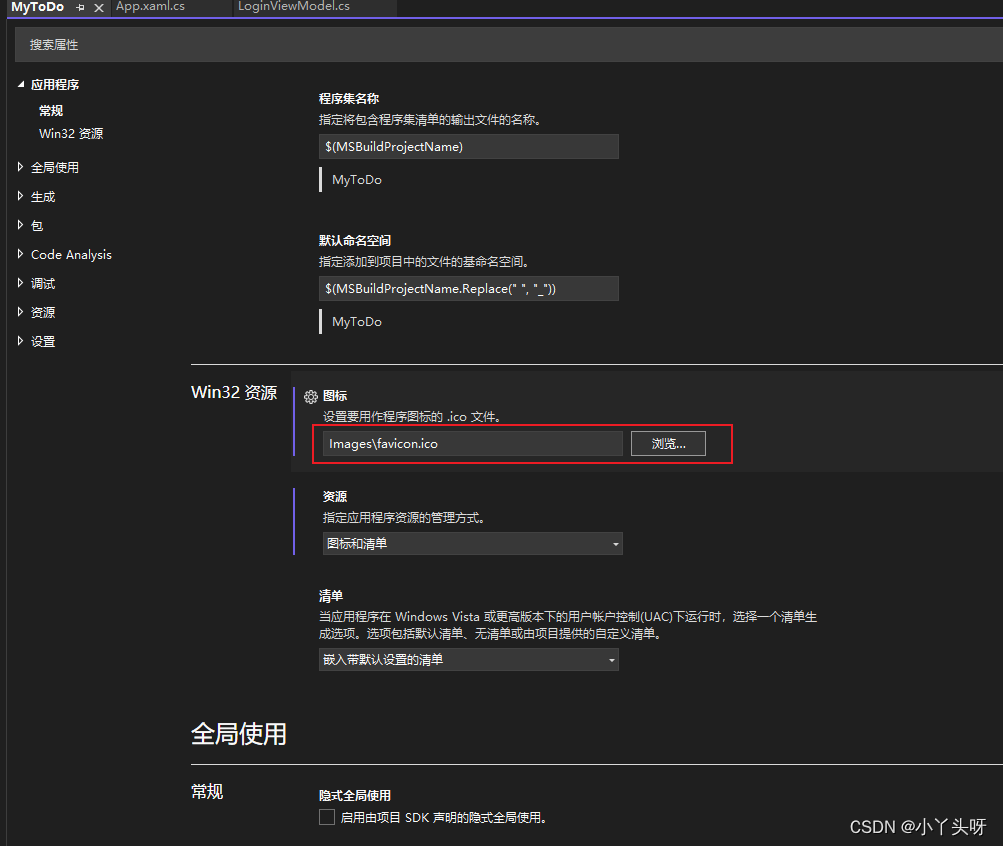
Day30 登录界面设计
本章节,实现了登录界面窗口设计 一.准备登录界面图片素材(透明背景图片) 把准备好的图片放在 Images 文件夹下面,格式分别是 .png和 .icoico 图片,右键属性,生成操作选 内容 png 图片,右键属性,生成操作选 资源 选中 login.png图片鼠标右键,选择属性。生成的操作选…...

VOJ 迷阵突围 题解 次短路径 dijkstra算法
迷阵突围 题目描述 小明陷入了坐标系上的一个迷阵,迷阵上有 n 个点,编号从 1 到 n 。小明在编号为 1 的位置,他想到编号为 n 的位置上。小明当然想尽快到达目的地,但是他觉得最短的路径可能有风险,所以他会选择第二短…...

Oracle SQL详解
Oracle SQL是一种用于管理和操作Oracle数据库的编程语言。以下是一些基本的Oracle SQL语法和建表建用户的详解。 创建用户 在Oracle中,创建用户通常需要具有足够权限的用户(通常是具有DBA角色的用户)。以下是一个创建用户的例子:…...

产业,到底需要什么大模型?
[ 产业究竟需要怎样的大模型?关于这个问题,本文作者便提出了他的看法,并总结了产业大模型目前阶段的三点落地挑战。一起来看看,或许可以帮助你更好地理解大模型与行业、与产业的融合。 写下这篇的起因,是前不久的一件事…...

每日5题Day17 - LeetCode 81 - 85
每一步向前都是向自己的梦想更近一步,坚持不懈,勇往直前! 第一题:81. 搜索旋转排序数组 II - 力扣(LeetCode) class Solution {public boolean search(int[] nums, int target) {int n nums.length;if (n…...

后端开发面经系列 --中望C++面经
中望C面经,全部内容! 公众号:阿Q技术站 文章目录 中望C面经,全部内容!一面 8.15 时长45min1、介绍项目相关2、gdb怎么调试的?打断点用什么指令?3、gcc的编译过程4、cmake添加头文件搜索路径用…...
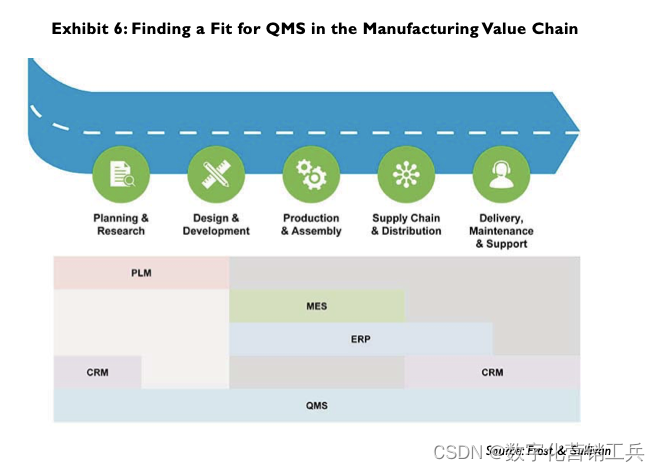
德国西门子论未来质量管理 - 如何与明天相遇?
未来制造业的质量 -- 如何用软件方案满足质量要求 作者:Bill Butcher 翻译&编辑:数字化营销工兵 【前言】在Frost&Sullivan最近发表的一份白皮书中,他们讨论了制造业的质量投资。质量是制造过程的关键要素,但似乎比其他…...
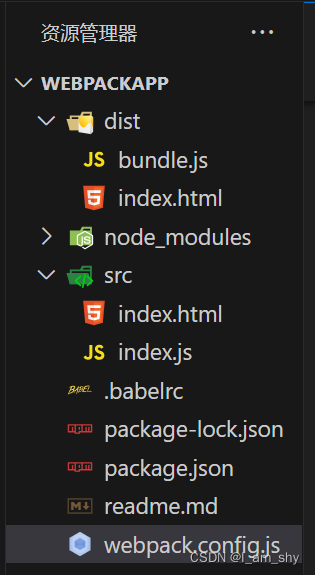
webpack快速入门---webpack的安装和基本使用
webpack是什么 本质上,webpack 是一个用于现代 JavaScript 应用程序的 静态模块打包工具。当 webpack 处理应用程序时,它会在内部从一个或多个入口点构建一个 依赖图(dependency graph),然后将你项目中所需的每一个模块组合成一个或多个 bund…...

后端开发面经系列 -- 华为C++一面面经
HUAWEI – C一面面经 公众号:阿Q技术站 来源:https://www.nowcoder.com/feed/main/detail/b8113ff340d7444985b32a73c207c826 1、计网的协议分几层?分别叫什么? OSI七层模型 物理层 (Physical Layer): 负责物理设备之间的原始比…...

csrf漏洞与ssrf漏洞
环境:用kali搭建的pikachu靶场 一.CSRF 1.CSRF漏洞简介 跨站请求伪造(CSRF)漏洞是一种Web应用程序安全漏洞,攻击者通过伪装成受信任用户的请求来执行未经授权的操作。这可能导致用户在不知情的情况下执行某些敏感操作࿰…...
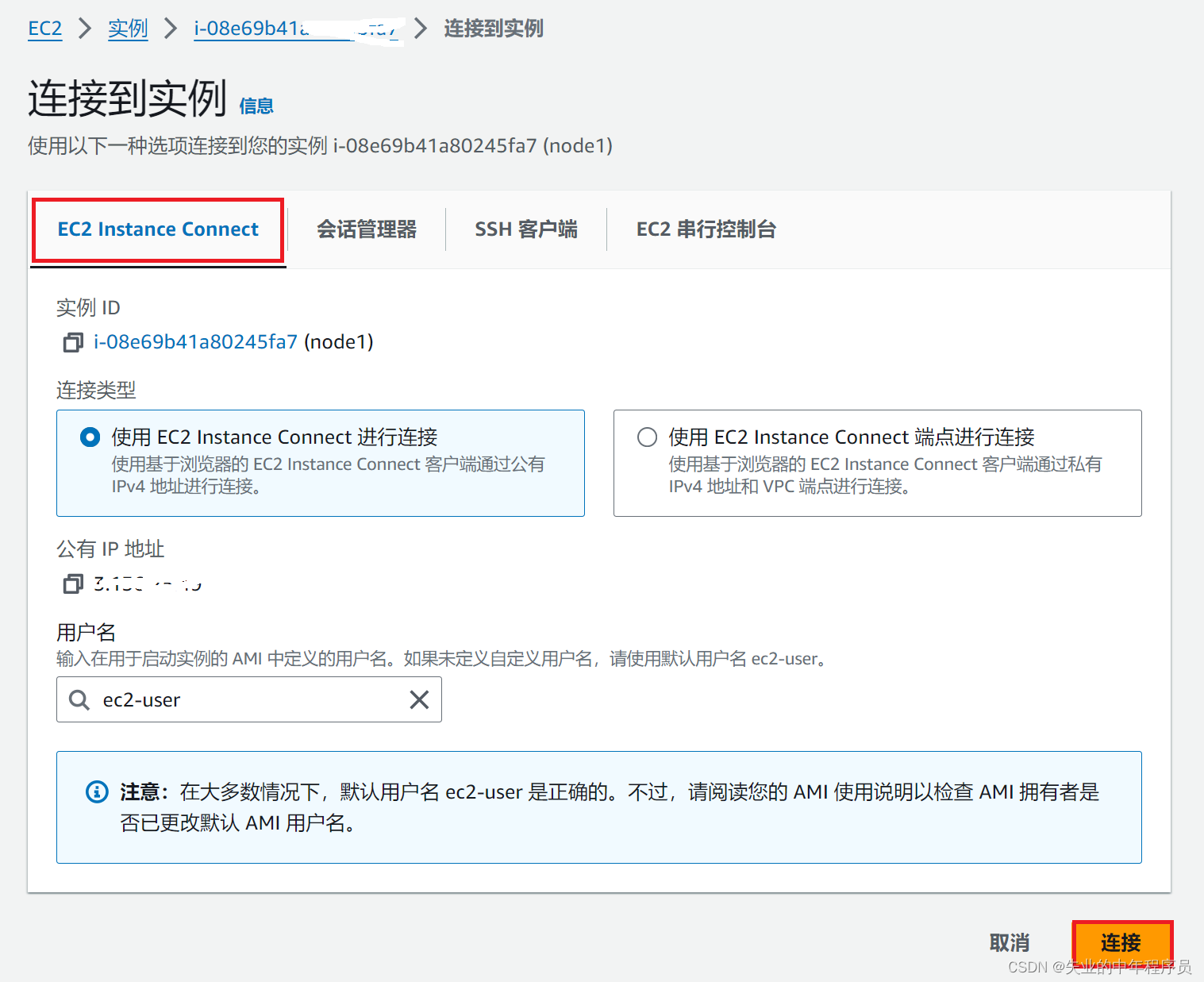
AWS EC2服务器开启root密码,SSH登录
1) EC2 Instance Connect连接,更改root密码 sudo passwd root 2)接着切换到切换到 root 身份,编辑 SSH 配置文件 $ sudo -i$ vi /etc/ssh/sshd_configPasswordAuthentication no,把 no 改成 yes #PermitRootLogin prohibit-passw…...

IDEA运行Tomcat出现乱码问题解决汇总
最近正值期末周,有很多同学在写期末Java web作业时,运行tomcat出现乱码问题,经过多次解决与研究,我做了如下整理: 原因: IDEA本身编码与tomcat的编码与Windows编码不同导致,Windows 系统控制台…...
label-studio的使用教程(导入本地路径)
文章目录 1. 准备环境2. 脚本启动2.1 Windows2.2 Linux 3. 安装label-studio机器学习后端3.1 pip安装(推荐)3.2 GitHub仓库安装 4. 后端配置4.1 yolo环境4.2 引入后端模型4.3 修改脚本4.4 启动后端 5. 标注工程5.1 创建工程5.2 配置图片路径5.3 配置工程类型标签5.4 配置模型5.…...

2025年能源电力系统与流体力学国际会议 (EPSFD 2025)
2025年能源电力系统与流体力学国际会议(EPSFD 2025)将于本年度在美丽的杭州盛大召开。作为全球能源、电力系统以及流体力学领域的顶级盛会,EPSFD 2025旨在为来自世界各地的科学家、工程师和研究人员提供一个展示最新研究成果、分享实践经验及…...

江苏艾立泰跨国资源接力:废料变黄金的绿色供应链革命
在华东塑料包装行业面临限塑令深度调整的背景下,江苏艾立泰以一场跨国资源接力的创新实践,重新定义了绿色供应链的边界。 跨国回收网络:废料变黄金的全球棋局 艾立泰在欧洲、东南亚建立再生塑料回收点,将海外废弃包装箱通过标准…...

【算法训练营Day07】字符串part1
文章目录 反转字符串反转字符串II替换数字 反转字符串 题目链接:344. 反转字符串 双指针法,两个指针的元素直接调转即可 class Solution {public void reverseString(char[] s) {int head 0;int end s.length - 1;while(head < end) {char temp …...
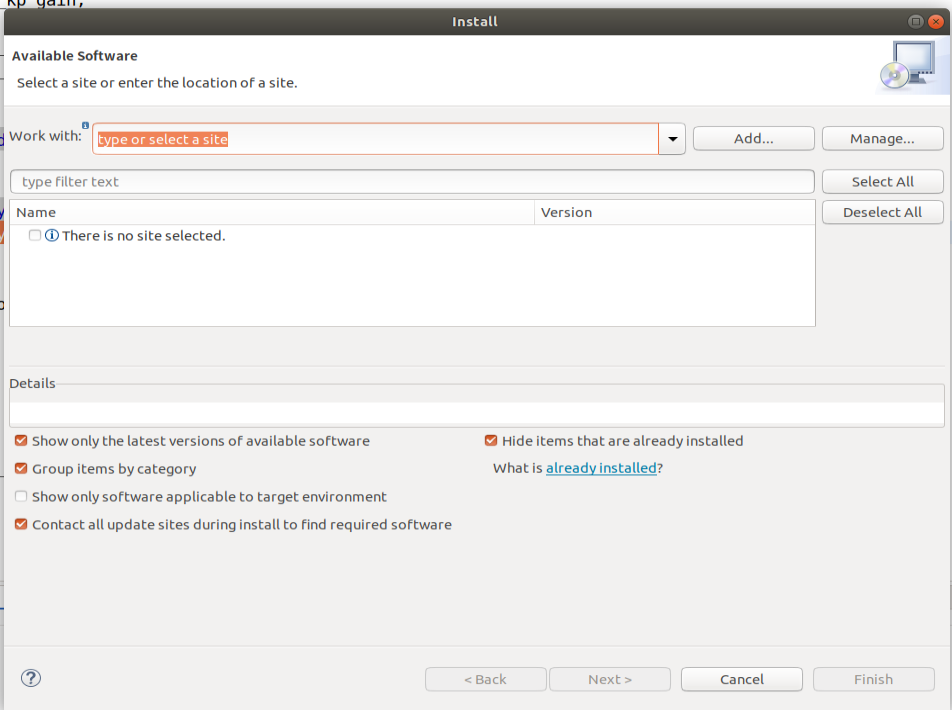
ardupilot 开发环境eclipse 中import 缺少C++
目录 文章目录 目录摘要1.修复过程摘要 本节主要解决ardupilot 开发环境eclipse 中import 缺少C++,无法导入ardupilot代码,会引起查看不方便的问题。如下图所示 1.修复过程 0.安装ubuntu 软件中自带的eclipse 1.打开eclipse—Help—install new software 2.在 Work with中…...

06 Deep learning神经网络编程基础 激活函数 --吴恩达
深度学习激活函数详解 一、核心作用 引入非线性:使神经网络可学习复杂模式控制输出范围:如Sigmoid将输出限制在(0,1)梯度传递:影响反向传播的稳定性二、常见类型及数学表达 Sigmoid σ ( x ) = 1 1 +...

ios苹果系统,js 滑动屏幕、锚定无效
现象:window.addEventListener监听touch无效,划不动屏幕,但是代码逻辑都有执行到。 scrollIntoView也无效。 原因:这是因为 iOS 的触摸事件处理机制和 touch-action: none 的设置有关。ios有太多得交互动作,从而会影响…...

OPENCV形态学基础之二腐蚀
一.腐蚀的原理 (图1) 数学表达式:dst(x,y) erode(src(x,y)) min(x,y)src(xx,yy) 腐蚀也是图像形态学的基本功能之一,腐蚀跟膨胀属于反向操作,膨胀是把图像图像变大,而腐蚀就是把图像变小。腐蚀后的图像变小变暗淡。 腐蚀…...
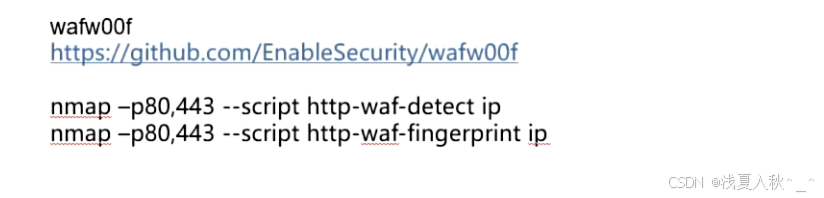
网站指纹识别
网站指纹识别 网站的最基本组成:服务器(操作系统)、中间件(web容器)、脚本语言、数据厍 为什么要了解这些?举个例子:发现了一个文件读取漏洞,我们需要读/etc/passwd,如…...