[C++]基于C++opencv结合vibe和sort tracker实现高空抛物实时检测
【vibe算法介绍】
ViBe算法是一种高效的像素级视频背景建模和前景检测算法。以下是对该算法的详细介绍:
一、算法原理
ViBe算法的核心思想是通过为每个像素点存储一个样本集,利用该样本集与当前像素值进行比较,从而判断该像素是否属于背景。算法的主要步骤包括背景模型的初始化、前景检测过程和背景模型的更新方法。
- 背景模型的初始化:
- 在初始时刻(如第一帧图像),为每个像素点随机选择其邻域像素的像素值作为背景模型的样本值。这样可以确保背景模型在开始时即具有一定的鲁棒性。
- 前景检测过程:
- 对于后续的图像序列,算法会将每个新的像素值与背景模型中的样本进行比较。
- 如果新像素值与背景模型中的样本值差异小于预设的阈值,则该像素被判定为背景;否则,被判定为前景。
- 背景模型的更新方法:
- ViBe算法的更新策略具有时间和空间上的随机性。
- 在时间随机性方面,算法会随机选择一个背景模型进行更新,以模拟像素值随时间变化的不确定性。
- 在空间随机性方面,算法会在被判定为背景的像素点的邻域中随机选择一个像素值来更新背景模型,以模拟像素值在空间上的变化。
二、算法优点
- 内存占用少:由于每个像素只需存储一个样本集,因此内存占用较少。
- 性能优越:算法的性能优于混合高斯、参数化方法等传统方法,尤其在处理动态背景时表现出色。
- 无参数法:算法无需手动调整参数,可以直接应用于各种场景。
- 抗噪能力强:由于采用随机更新策略,算法对噪声具有较强的鲁棒性。
三、算法挑战与限制
- Ghost区域:在某些情况下,算法可能会出现误检,将前景物体误判为背景,形成所谓的“Ghost”区域。
- 环境变化适应性:算法需要能够适应环境的变化,如光照变化、相机抖动等。
- 密集物体检测:对于图像中密集出现的物体(如树叶、树干等),算法的检测效果可能受到一定影响。
综上所述,ViBe算法是一种高效、鲁棒的像素级视频背景建模和前景检测算法,具有广泛的应用前景。然而,在实际应用中仍需注意其挑战与限制,并进行相应的优化和改进。
【sort track算法介绍】
SORT(Simple Online and Realtime Tracking)算法是一种简单、高效且实用的多目标跟踪算法。以下是对SORT算法的介绍,内容将按照清晰的格式分点表示,并尽可能参考文章中的相关数字和信息:
一、算法概述
- 全称:Simple Online and Realtime Tracking(SORT)
- 特点:简单、高效、实时性强
- 应用领域:适用于各种需要实时多目标跟踪的场景,如监控视频分析、自动驾驶汽车感知、无人机追踪等
二、算法原理
1. 核心组件
- 卡尔曼滤波:用于预测目标在下一帧中的位置。卡尔曼滤波基于前一帧的目标位置和速度来预测当前帧的目标位置,并基于测量值(即检测到的目标位置)来更新预测值,以达到更精确的估计。
- 匈牙利算法:用于解决数据关联问题,即确定前后两帧中真正匹配的目标。匈牙利算法通过计算前后两帧目标之间的相似度矩阵,并求解该矩阵来找到最佳匹配。
2. 工作流程
- 目标检测:使用目标检测器(如Faster R-CNN)在每一帧中检测目标,得到目标框(Detections)。
- 预测:使用卡尔曼滤波器预测当前帧的轨迹(Tracks)。
- 匹配:将目标框(Detections)和轨迹(Tracks)进行IOU(Intersection over Union)匹配。匹配结果分为三种:
- Matched Track:成功匹配的目标和轨迹。
- Unmatched Tracks:未能成功匹配的目标轨迹,被认为是失配。如果失配持续了T次(T是一个预设的阈值),该目标ID将从待跟踪目标中删除。
- Unmatched Detections:未能成功匹配到轨迹的目标框,需要为其分配一个新的轨迹。
- 更新:卡尔曼滤波根据匹配的轨迹状态预测下一帧的目标框状态,并更新所有轨迹的状态。
三、算法特点
- 实时性强:由于算法复杂度低,SORT算法可以实现高速跟踪,据参考文章所述,追踪器可以实现260Hz的速度。
- 简单易用:代码结构清晰,依赖库少,便于理解和集成到其他项目中。
- 兼容性强:可在Windows和Linux环境下运行,适用范围广。
- 灵活性:提供参数调整,适应不同场景的需求。
四、优缺点
- 优点:
- 速度快:处理速度快,适用于实时应用。
- 准确性高:在没有遮挡的情况下,准确性较高。
- 缺点:
- 对遮挡处理不足:当目标被遮挡时,ID切换次数较高,可能导致跟踪不准确。
- 未考虑目标外观特征:仅使用检测框的位置和大小进行目标匹配,未考虑目标的外观特征。
五、总结
SORT算法以其简单、高效和实时性强的特点,在多目标跟踪领域具有广泛的应用前景。然而,在实际应用中仍需注意其处理遮挡和目标外观特征方面的限制,并根据具体需求进行相应的优化和改进。
【测试环境】
vs2019
opencv==4.8.0
x64 release(Debug暂时没测试通过)
【部分实现源码】
#define _CRT_SECURE_NO_WARNINGS
#include "tracker.hpp"
#include "trajectory.hpp"
#include "utils.hpp"
#include "vibe_sequential.hpp"
#include <array>
#include <chrono>
#include <cmath>
#include <cstddef>
#include <cstdio>
#include <cstdlib>
#include <memory>
#include <opencv2/core.hpp>
#include <opencv2/imgcodecs.hpp>
#include <opencv2/imgproc.hpp>
#include <opencv2/highgui.hpp>
#include <stdexcept>
#include <string>
#include <string_view>
#include <thread>
using namespace std;
using namespace cv;
int main(int argc, char* argv[]) {int maxNumBlobs = 64;VideoCapture capture("test.mp4");if (!capture.isOpened())return -1;double fps = capture.get(cv::CAP_PROP_FPS); // 帧率int width = capture.get(cv::CAP_PROP_FRAME_WIDTH); // 视频帧宽度int height = capture.get(cv::CAP_PROP_FRAME_HEIGHT); // 视频帧高度// Create vibe algorithm instanceauto vibe = std::make_unique<ViBeSequential>(height, width, 14, 20, 2, 5);// Create tracker instanceauto tracker = std::make_unique<SortTracker>(3, 3);auto detections = std::vector<cv::Rect2f>(8);cv::Mat fgMask(height, width, CV_8U);cv::Mat updateMask(height, width, CV_8U);cv::Mat fgBlobLabels(height, width, CV_32S);cv::Mat fgBlobCentroids(64, 2, CV_64F);cv::Mat fgBlobStats(64, 5, CV_32S);// Prepare structure elements for morphological filteringcv::Mat se3x3 = cv::getStructuringElement(cv::MORPH_ELLIPSE, { 3, 3 });cv::Mat se5x5 = cv::getStructuringElement(cv::MORPH_ELLIPSE, { 5, 5 });cv::Mat se7x7 = cv::getStructuringElement(cv::MORPH_ELLIPSE, { 7, 7 });// Prepare runtime measurementauto tm = cv::TickMeter();while (true){Mat frame;capture >> frame; // 从相机读取新一帧if (frame.empty()){break;}/* Segmentation and update. */tm.reset();tm.start();// Run background segmentation with ViBevibe->segment(frame, fgMask);// Process update maskcv::morphologyEx(fgMask, updateMask, cv::MORPH_OPEN, se3x3);// Update ViBevibe->update(frame, updateMask);// Post-processing on foreground maskcv::morphologyEx(fgMask, fgMask, cv::MORPH_OPEN, se3x3);cv::morphologyEx(fgMask, fgMask, cv::MORPH_CLOSE, se5x5);tm.stop();double vibeProcessTimeMs = tm.getTimeMilli();// Find all connected componentsint numFgBlobs = cv::connectedComponentsWithStats(fgMask, fgBlobLabels, fgBlobStats, fgBlobCentroids);if (numFgBlobs > maxNumBlobs) {// Too many blobs, consider this frame invalidtracker->clear();continue;}detections.clear();for (int i = 1; i < numFgBlobs; i++) {auto* blobStat = fgBlobStats.ptr<int>(i);int x = blobStat[cv::CC_STAT_LEFT] - 6;int y = blobStat[cv::CC_STAT_TOP] - 6;int w = blobStat[cv::CC_STAT_WIDTH] + 12;int h = blobStat[cv::CC_STAT_HEIGHT] + 12;// int a = blobStat[cv::CC_STAT_AREA];// Add new bboxdetections.emplace_back(x, y, w, h);// auto color = colors.row(i % colors.rows);cv::rectangle(frame, { x, y, w, h }, { 255, 50, 0 }, 1);}tm.reset();tm.start();// Update tracker with newly detected bboxestracker->update(detections, frame);tm.stop();double trackingTimeMs = tm.getTimeMilli();std::array<char, 64> str;std::sprintf(str.data(),"[PROCESS TIME] ViBe: %.2f ms, Tracking: %.2f",vibeProcessTimeMs,trackingTimeMs);// Draw process time measurement result on current framecv::putText(frame,str.data(),{ 12, 30 },cv::FONT_HERSHEY_SIMPLEX,0.5,{ 0, 0, 255 },1,cv::LINE_AA);cv::imshow("frame", frame);cv::imshow("fgmask", fgMask);cv::imshow("update mask", updateMask);if (char(waitKey(2)) == 'q'){break;}}capture.release();cv::destroyAllWindows();}【效果展示】
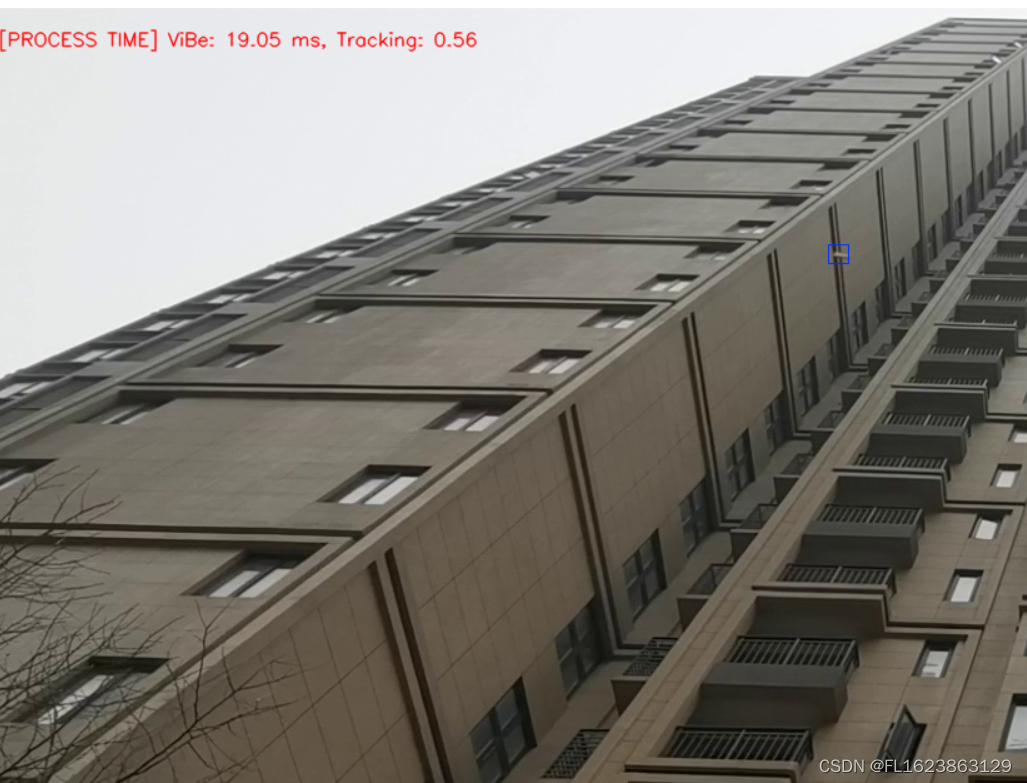
【视频演示】
基于C++opencv结合vibe和sort tracker实现高空抛物实时检测_哔哩哔哩_bilibili【测试环境】vs2019opencv==4.8.0x64 release(Debug暂时没测试通过)更多信息参考博文:blog.csdn.net/FL1623863129/article/details/139493227, 视频播放量 6、弹幕量 0、点赞数 0、投硬币枚数 0、收藏人数 0、转发人数 0, 视频作者 未来自主研究中心, 作者简介 未来自主研究中心,相关视频:基于onnx模型加密与解密深度学习模型保护方法介绍,使用纯opencv部署yolov8目标检测模型onnx,C++版本yolov8的onnx模型加密方法保护自己模型和版权,将yolov8封装成一个类几行代码完成语义分割任务,使用C#的winform部署yolov8的onnx实例分割模型,使用C#调用libotrch-yolov5模型实现全网最快winform目标检测,Python自动答题脚本刷题,100%正确率,附源码!可刷课!期末再也不用担心挂科了!Python教程Python入门编程入门爬虫代码Python基础安装,C#调用yolov7进行目标检测winform开发,基于yolov8官方目标追踪botsort和bytetrack源码开发视频演示,使用C#部署openvino-yolov5s模型![]() https://www.bilibili.com/video/BV1zD421g7zR/?vd_source=989ae2b903ea1b5acebbe2c4c4a635ee
https://www.bilibili.com/video/BV1zD421g7zR/?vd_source=989ae2b903ea1b5acebbe2c4c4a635ee
【源码下载地址】https://download.csdn.net/download/FL1623863129/89403409
相关文章:
[C++]基于C++opencv结合vibe和sort tracker实现高空抛物实时检测
【vibe算法介绍】 ViBe算法是一种高效的像素级视频背景建模和前景检测算法。以下是对该算法的详细介绍: 一、算法原理 ViBe算法的核心思想是通过为每个像素点存储一个样本集,利用该样本集与当前像素值进行比较,从而判断该像素是否属于背景…...
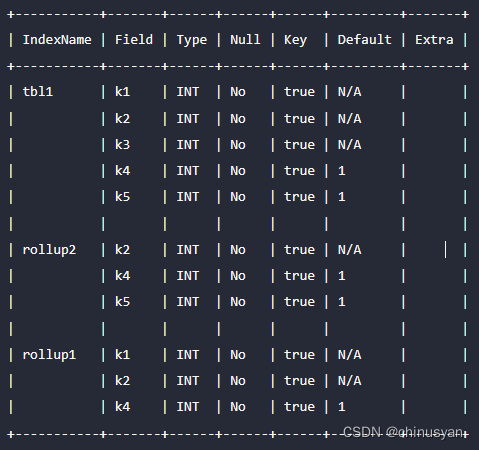
Apache Doris 基础 -- 数据表设计(模式更改)
用户可以通过schema Change操作修改现有表的模式。表的模式主要包括对列的修改和对索引的修改。这里我们主要介绍与列相关的Scheme更改。对于与索引相关的更改,可以查看数据表设计/表索引,查看每个索引的更改方法。 1、术语 基本表(Base Ta…...
【机器学习】【遗传算法】【项目实战】药品分拣的优化策略【附Python源码】
仅供学习、参考使用 一、遗传算法简介 遗传算法(Genetic Algorithm, GA)是机器学习领域中常见的一类算法,其基本思想可以用下述流程图简要表示: (图参考论文:Optimization of Worker Scheduling at Logi…...

电子电气架构 ---车载安全防火墙
我是穿拖鞋的汉子,魔都中坚持长期主义的汽车电子工程师。 老规矩,分享一段喜欢的文字,避免自己成为高知识低文化的工程师: 屏蔽力是信息过载时代一个人的特殊竞争力,任何消耗你的人和事,多看一眼都是你的不对。非必要不费力证明自己,无利益不试图说服别人,是精神上的节…...

解决selenium加载网页过慢影响程序运行时间的问题
在用selenium爬取动态加载网页时,发现网页内容都全部加载完了,但是页面还在转圈,并且获取页面内容的代码也没有执行,后面了解到selenium元素操作等方法是需要等待页面所有元素完全加载完成后才开始执行的,所以在页面未…...
何为云防护?有何作用
云防护又称云防御。随着Internet互联网络带宽的增加和多种DDOS 黑客工具的不断发布,云计算越演越热,DDOS拒绝服务攻击的实施越来越容易,DDOS攻击事件正在成上升趋势。出于商业竞争、打击报复和网络敲诈等多种因素,导致很多IDC 托管…...

2024050402-重学 Java 设计模式《实战责任链模式》
重学 Java 设计模式:实战责任链模式「模拟618电商大促期间,项目上线流程多级负责人审批场景」 一、前言 场地和场景的重要性 射击🏹需要去靶场学习、滑雪🏂需要去雪场体验、开车🚗需要能上路实践,而编程…...
centos7安装字体
1.安装命令 yum install fontconfig #字体库命令 yum install mkfontscale #更新字体命令2.安装字体(注意权限问题) 进入目录 /usr/share/fonts ,该目录是 centos7 字体库的默认安装目录。在该目录下创建一个文件夹 ekp (名字…...

Llama模型家族之使用 ReFT技术对 Llama-3 进行微调(三)为 ReFT 微调准备模型及数据集
LlaMA 3 系列博客 基于 LlaMA 3 LangGraph 在windows本地部署大模型 (一) 基于 LlaMA 3 LangGraph 在windows本地部署大模型 (二) 基于 LlaMA 3 LangGraph 在windows本地部署大模型 (三) 基于 LlaMA…...
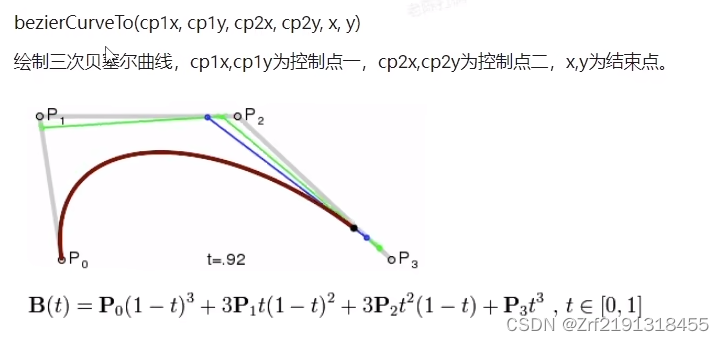
学习Canvas过程中2D的方法、注释及感悟一(通俗易懂)
1.了解Canvas: Canvas是前端一个很重要的知识点,<canvas>标签用于创建画布绘制图形,通过JavaScript进行操作。它为开发者提供一个动态绘制图形的区域,用于创建图标、游戏动画、图像处理等。 对于能够熟练使用Canvas的开发者…...

《TCP/IP网络编程》(第十三章)多种I/O函数(2)
使用readv和writev函数可以提高数据通信的效率,它们的功能可以概括为**“对数据进行整合传输及发送”**。 即使用writev函数可以将分散在多个缓冲中的数据一并发送,使用readv函数可以由多个缓冲分别接受,所以适当使用他们可以减少I/O函数的调…...

Java集合汇总
Java中的集合框架是Java语言的核心部分,提供了强大的数据结构来存储和操作对象集合。集合框架位于java.util包中,主要可以分为两大类:Collection(单列集合)和Map(双列集合)。下面是对它们的总结…...

度小满金融大模型的应用创新
XuanYuan/README.md at main Duxiaoman-DI/XuanYuan GitHub...

Android WebView上传文件/自定义弹窗技术,附件的解决方案
安卓内核开发 其实是Android的webview默认是不支持<input type"file"/>文件上传的。现在的前端页面需要处理的是: 权限 文件路径AndroidManifest.xml <uses-permission android:name"android.permission.WRITE_EXTERNAL_STORAGE"/&g…...

selenium 输入框、按钮,输入点击,获取元素属性等简单例子
元素操作 nput框 输入send_keys, input框 清除clear(), 按钮 点击click() 按钮 提交submit() 获取元素 tag_name、 class属性值、 坐标尺寸 """ input框 输入1次,再追加输入一次, 清除, 再重新输入&…...

结构体构造函数
【知识点:结构体构造函数】下面两段代码等价。 (1)结构体构造函数写法 struct LinkNode {int data;LinkNode* next;LinkNode(int x):data(x),next(NULL) {} }; LinkNode* Lnew LinkNode(123); (2)非结构体构造函数写…...

基于单片机的电子万年历设计
摘要: 本设计以 AT89C51 单片机为主控器,使用 DS1302 时钟芯片、DS18B20 温度芯片、LCD1602 显示模块,利用Proteus 仿真软件和 Keil 编译软件进行了基于单片机的电子万年历仿真,设计的万年历可以在液晶上显示时间,同时还具有时间校准、温度显示等功能。 关键词 :单片机…...
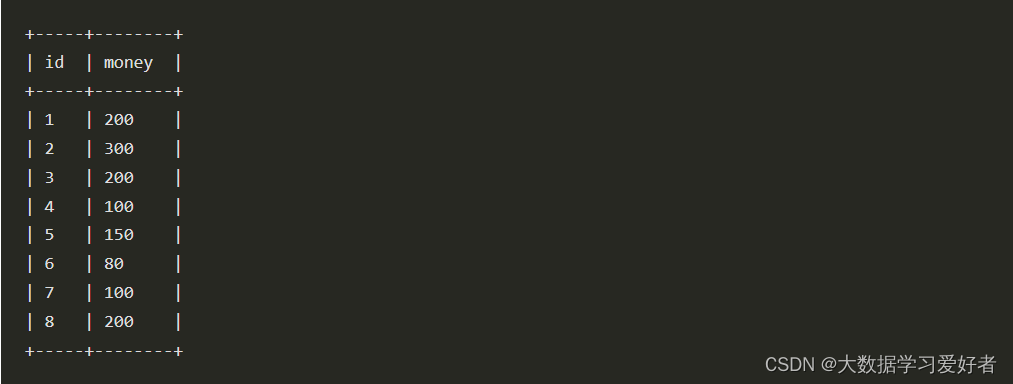
大厂真实面试题(一)
滴滴大数据sql 取出累计值与1000差值最小的记录 1.题目 已知有表t_cost_detail包含id和money两列,id为自增,请累加计算money值,并求出累加值与1000差值最小的记录。 2.分析 本题主要是想找到累加值域1000差距最小的记录,也就是我们要对上述按照id进行排序并且累加,并…...
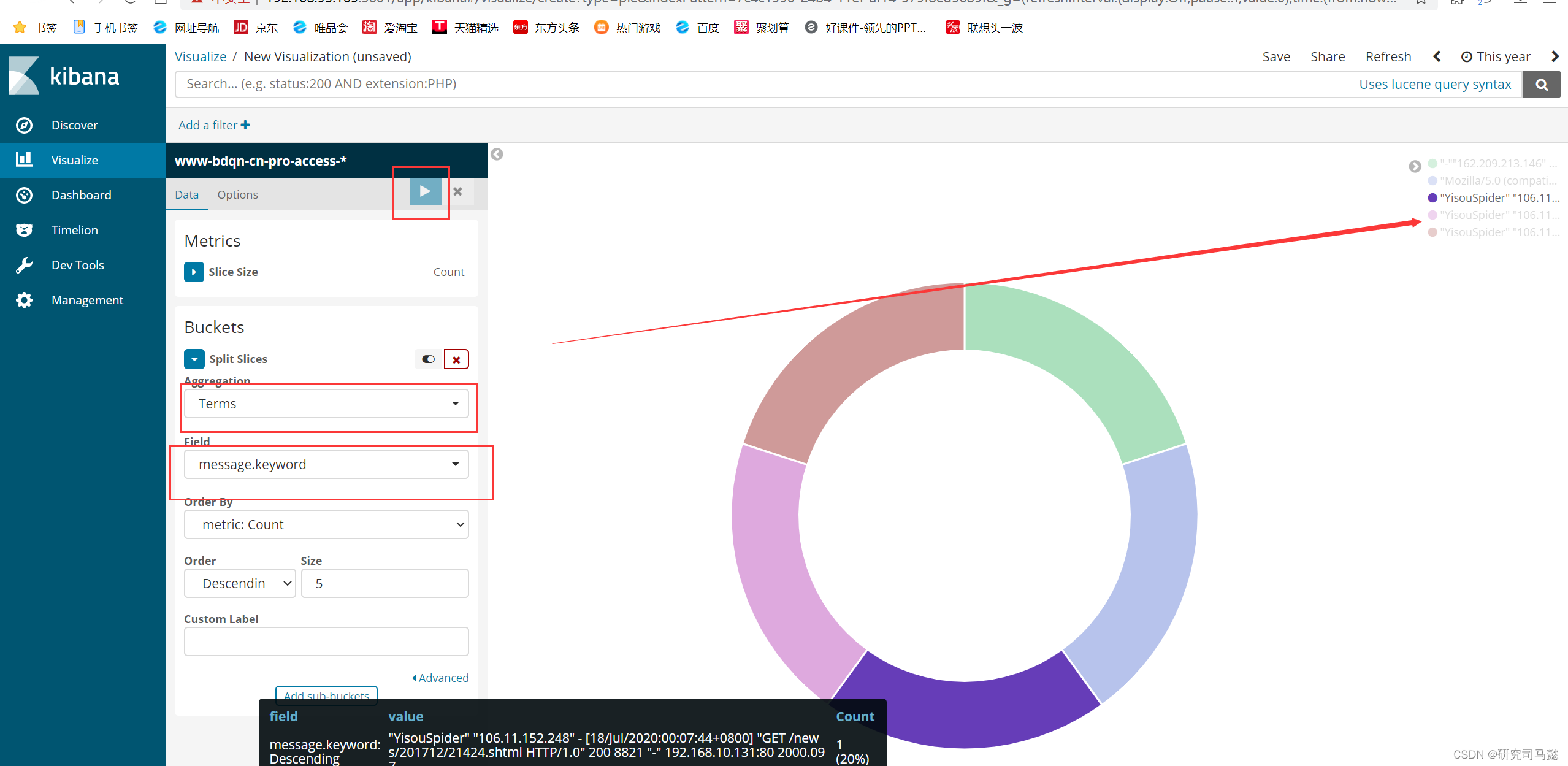
Docker搭建ELKF日志分析系统
Docker搭建ELKF日志分析系统 文章目录 Docker搭建ELKF日志分析系统资源列表基础环境一、系统环境准备1.1、创建所需的映射目录1.2、修改系统参数1.3、单击创建elk-kgc网络桥接 二、基于Dockerfile构建Elasticsearch镜像2.1、创建Elasticsearch工作目录2.2、上传资源到指定工作路…...
把系统引导做到U盘,实现插上U盘才能开机
前言 有个小伙伴提出了这样一个问题:能不能把U盘制作成电脑开机的钥匙? 小白稍微思考了一下,便做了这样一个回复:可以。 至于为什么要思考一下,这样会显得我有认真思考他提出的问题。 Windows7或以上系统均支持UEF…...
eNSP-Cloud(实现本地电脑与eNSP内设备之间通信)
说明: 想象一下,你正在用eNSP搭建一个虚拟的网络世界,里面有虚拟的路由器、交换机、电脑(PC)等等。这些设备都在你的电脑里面“运行”,它们之间可以互相通信,就像一个封闭的小王国。 但是&#…...

conda相比python好处
Conda 作为 Python 的环境和包管理工具,相比原生 Python 生态(如 pip 虚拟环境)有许多独特优势,尤其在多项目管理、依赖处理和跨平台兼容性等方面表现更优。以下是 Conda 的核心好处: 一、一站式环境管理:…...

深入剖析AI大模型:大模型时代的 Prompt 工程全解析
今天聊的内容,我认为是AI开发里面非常重要的内容。它在AI开发里无处不在,当你对 AI 助手说 "用李白的风格写一首关于人工智能的诗",或者让翻译模型 "将这段合同翻译成商务日语" 时,输入的这句话就是 Prompt。…...

工业安全零事故的智能守护者:一体化AI智能安防平台
前言: 通过AI视觉技术,为船厂提供全面的安全监控解决方案,涵盖交通违规检测、起重机轨道安全、非法入侵检测、盗窃防范、安全规范执行监控等多个方面,能够实现对应负责人反馈机制,并最终实现数据的统计报表。提升船厂…...
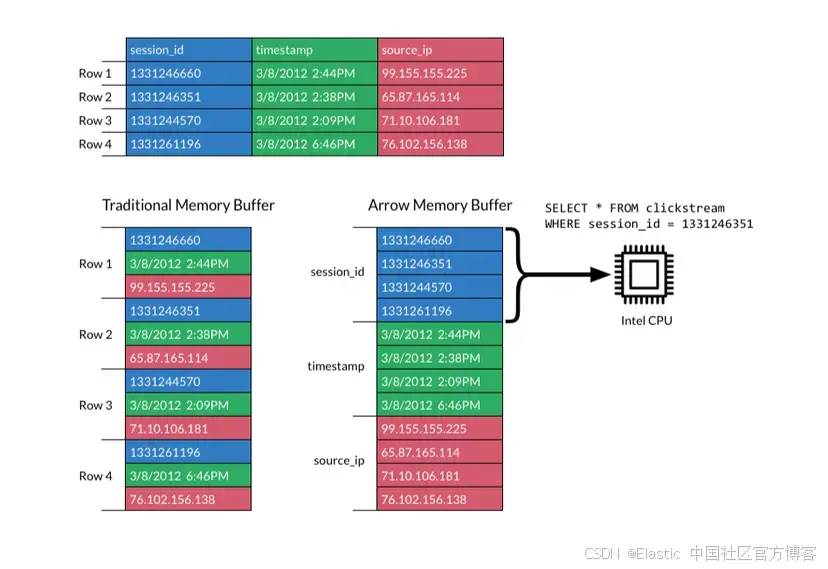
JavaScript 中的 ES|QL:利用 Apache Arrow 工具
作者:来自 Elastic Jeffrey Rengifo 学习如何将 ES|QL 与 JavaScript 的 Apache Arrow 客户端工具一起使用。 想获得 Elastic 认证吗?了解下一期 Elasticsearch Engineer 培训的时间吧! Elasticsearch 拥有众多新功能,助你为自己…...

ssc377d修改flash分区大小
1、flash的分区默认分配16M、 / # df -h Filesystem Size Used Available Use% Mounted on /dev/root 1.9M 1.9M 0 100% / /dev/mtdblock4 3.0M...

数据链路层的主要功能是什么
数据链路层(OSI模型第2层)的核心功能是在相邻网络节点(如交换机、主机)间提供可靠的数据帧传输服务,主要职责包括: 🔑 核心功能详解: 帧封装与解封装 封装: 将网络层下发…...

大模型多显卡多服务器并行计算方法与实践指南
一、分布式训练概述 大规模语言模型的训练通常需要分布式计算技术,以解决单机资源不足的问题。分布式训练主要分为两种模式: 数据并行:将数据分片到不同设备,每个设备拥有完整的模型副本 模型并行:将模型分割到不同设备,每个设备处理部分模型计算 现代大模型训练通常结合…...
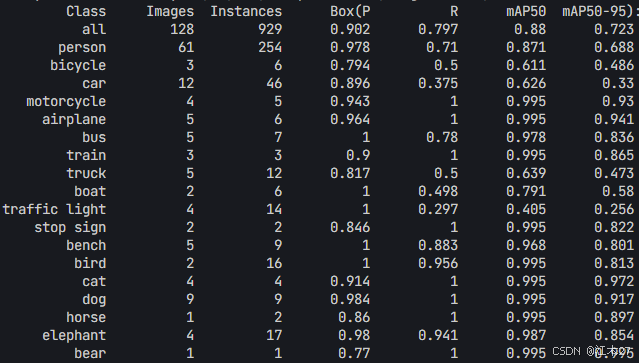
Yolov8 目标检测蒸馏学习记录
yolov8系列模型蒸馏基本流程,代码下载:这里本人提交了一个demo:djdll/Yolov8_Distillation: Yolov8轻量化_蒸馏代码实现 在轻量化模型设计中,**知识蒸馏(Knowledge Distillation)**被广泛应用,作为提升模型…...

AGain DB和倍数增益的关系
我在设置一款索尼CMOS芯片时,Again增益0db变化为6DB,画面的变化只有2倍DN的增益,比如10变为20。 这与dB和线性增益的关系以及传感器处理流程有关。以下是具体原因分析: 1. dB与线性增益的换算关系 6dB对应的理论线性增益应为&…...