视觉SLAM14精讲——相机与图像3.1
视觉SLAM14精讲
- 三维空间刚体运动1.0
- 三维空间刚体运动1.1
- 三维空间刚体运动1.2
- 李群与李代数2.1
- 相机与图像3.1
视觉SLAM14精讲——相机与图像3.1
- 视觉SLAM14精讲
- 简介
- 相机模型
- 内参K
简介
相机是VSLAM中的核心传感器。本章知识点内容涉及到相机相关的知识以及3D计算视觉的一些基础内容。技术栈涉及到相机内外参的标定,投影,以及三维重建。
相机模型
内参K
K = [ f x 0 c x 0 f y c y 0 0 1 ] \begin{equation} K = \left[\begin{array}{ccc} f_x & 0 & c_x \\ 0 & f_y & c_y \\ 0& 0& 1\end{array} \right] \end{equation} K= fx000fy0cxcy1
在忽略畸变的情况下,相机平面中的点,需要转换成列向量,乘以内参的逆 K − 1 K^{-1} K−1, 就可以将其转换为空间坐标。但要注意,此时的空间坐标是以 z z z坐标进行归一化了的。同样的,空间中的点,对 z z z轴归一化以后,乘以内参 K K K就可以转换到图像空间。
P 3 D = K − 1 Z u , v P 2 D = K − 1 Z u , v ( u v 1.0 ) P 2 D = K 1 z P 3 D = K 1 z ( x y z ) \begin{align} P_{3D} &= K^{-1} Z_{u, v} P_{2D} = K^{-1} Z_{u, v} \left( \begin{array}{ccc} u \\ v \\ 1.0 \end{array} \right)\\ P_{2D} &= K \frac{1}{z }P_{3D} = K \frac{1}{z }\left( \begin{array}{ccc} x \\ y \\ z \end{array} \right)\\ \end{align} P3DP2D=K−1Zu,vP2D=K−1Zu,v uv1.0 =Kz1P3D=Kz1 xyz
- 三维点投影二维点,只需要坐标本身和内参即可计算获得。因此,式(2)中的 z z z值就是三维坐标中的 z z z分量。
- 相反的是,二维点不包含尺度因子,因此在恢复三维点的时候,需要额外的尺度因子作为补充。这里的尺度因子,就是常提到的深度 。式(1)中的 Z u , v Z_{u, v} Zu,v是坐标 u , v u, v u,v处所对应的深度信息。
式(1,2)反映只考虑一个这样的点进行内参计算的操作。意味着这样的操作需要重复 w × h w\times h w×h次。每个像素对应的深度值不同,才能够恢复出物体的结构。如若全部采用同一个深度值,则投影物体会变成一个“纸片”。或者干脆忽略深度因子,所重建的物体会在一米处形成一个“纸片”。
-
需要乘以深度信息揭示,内参矩阵中的焦距参数 f x , f y f_x, f_y fx,fy的单位并不是网上所谓的 p i x e l m m \frac{pixel}{mm} mmpixel或者其他带有实际物理距离的转换量纲,而是归一化的单位 p i x e l 1.0 \frac{pixel}{1.0} 1.0pixel。
-
此处的中心点坐标 c x , c y c_x, c_y cx,cy,是张正友标定法确定的投影中心坐标。如果单纯是图像中心坐标其实是不需要计算的。因此不能够简单用图像中心坐标当作内参的中心坐标。以上提到的所有参数,包括畸变参数,都随着相机芯片和固定了的镜头所确定。镜头动、芯片换,内参就需要重新进行标定。同一个内参,即便是同款相机也不能混用,必须做到一机一内参。相机镜头被意外触动,理论上必须重新进行内参标定。
-
还有一种情况。在相机的日常使用过程中,还会遇到的一种情况是改变相机分辨率。可能下意识会觉得需要重新标定内参K。其实这时候内参只需要和图像保持同样的缩放比即可, 但是 K [ 3 , 3 ] K[3,3] K[3,3]仍要保持等于1。
img2x = cv2.resize(img, (0,0), fx=2, fy=2)
K = K * 2
K[2, 2] = 1img0_5x = cv2.resize(img, (0,0), fx=0.5, fy=0.5)
K = K * 0.5
K[2, 2] = 1
- 另一些情况下,我们希望在即便矫正以后,图像仍能够保持相同的内参K参数,需要在opencv矫正畸变接口中,设定输出的内参参数,一般与矫正畸变前保持一致。
cv2.undistort(img, camera_matrix, K, K) #K.保持一致
cv2.initUndistortRectifyMap(K, D, R, K, (w,h), mapx, mapy) #K保持一致
相关文章:

视觉SLAM14精讲——相机与图像3.1
视觉SLAM14精讲 三维空间刚体运动1.0三维空间刚体运动1.1三维空间刚体运动1.2李群与李代数2.1相机与图像3.1 视觉SLAM14精讲——相机与图像3.1 视觉SLAM14精讲简介相机模型内参K 简介 相机是VSLAM中的核心传感器。本章知识点内容涉及到相机相关的知识以及3D计算视觉的一些基础…...
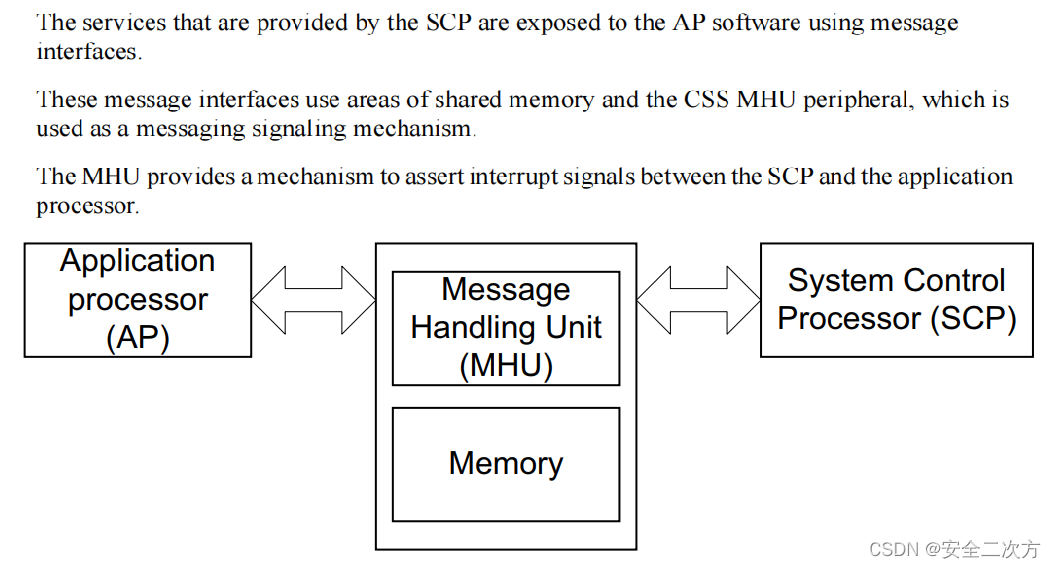
ARM功耗管理框架之SCP
安全之安全(security)博客目录导读 目录 一、功耗管理框架中的SCP 二、SCP的示例 三、SCP固件 四、SCP启动流程 五、SCP的memory map 六、SCP与AP的通信 思考:功耗管理框架?SCP?PPU?LPI?之间的关系?…...

uni-app学习--基础组件使用、页面生命周期、本地存储、网络请求、条件编译、路由跳转
文章目录 1. 基本组件的使用1. text文本组件的使用2. view视图容器组件的使用3. button按钮组件的使用4. image组件的使用5. map组件 2. uni-app中的样式1. uni-app:px2rpx计算 3. uni-app的数据绑定1. 基本的数据绑定2. v-bind,v-for,v-on 4. uni-app的生命周期1. …...

Cweek4+5
C语言学习 十.指针详解 6.有关函数指针的代码 代码1:(*(void (*)())0)(); void(*)()是函数指针类型,0是一个函数的地址 (void(*)())是强制转换 总的是调用0地址处的函数,传入参数为空 代码2:void (*signal(int, void(*)(int))…...

Segment Anything CSharp| 在 C# 中通过 OpenVINO™ 部署 SAM 模型实现万物分割
OpenVINO™ C# API 是一个 OpenVINO™ 的 .Net wrapper,应用最新的 OpenVINO™ 库开发,通过 OpenVINO™ C API 实现 .Net 对 OpenVINO™ Runtime 调用.Segment Anything Model(SAM)是一个基于Transformer的深度学习模型&#x…...
企业应如何选择安全合规的内外网文件摆渡系统?
网络隔离是一种安全措施,旨在将网络划分为不同的部分,以减少安全风险并保护敏感信息。常见的隔离方式像物理隔离、逻辑隔离、防火墙隔离、虚拟隔离、DMZ区隔离等,将网络隔离成内网和外网。内外网文件摆渡通常指在内部网络(内网&am…...

一分钟有60秒,这个有趣的原因你知道吗?
每周跟踪AI热点新闻动向和震撼发展 想要探索生成式人工智能的前沿进展吗?订阅我们的简报,深入解析最新的技术突破、实际应用案例和未来的趋势。与全球数同行一同,从行业内部的深度分析和实用指南中受益。不要错过这个机会,成为AI领…...
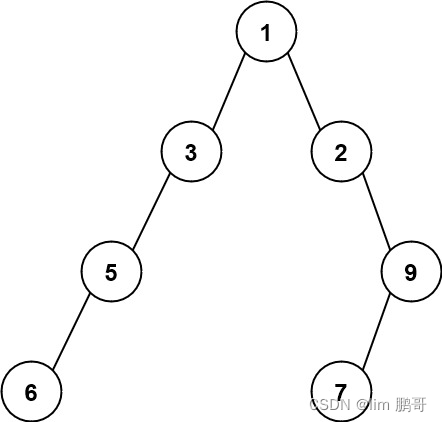
二叉树最大宽度
文章目录 前言二叉树最大宽度1.题目解析2.算法原理3.代码编写 总结 前言 二叉树最大宽度 1.题目解析 给你一棵二叉树的根节点 root ,返回树的 最大宽度 。 树的 最大宽度 是所有层中最大的 宽度 。 每一层的 宽度 被定义为该层最左和最右的非空节点(即…...
自定义HOOK)
React@16.x(24)自定义HOOK
目录 1,介绍2,简单举例2.1,获取数据1.2,计时器 2,自定义 HOOK 相比类组件 1,介绍 将一些常用的,跨组件的函数抽离,做成公共函数也就是 HOOK。自定义HOOK需要按照HOOK的规则来实现&a…...

群体优化算法----树蛙优化算法介绍以及应用于资源分配示例
介绍 树蛙优化算法(Tree Frog Optimization Algorithm, TFO)是一种基于群体智能的优化算法,模拟了树蛙在自然环境中的跳跃和觅食行为。该算法通过模拟树蛙在树枝间的跳跃来寻找最优解,属于近年来发展起来的自然启发式算法的一种 …...

常见汇编指令
下面是一些包含汇编指令 MOV、PUSH、POP、LEA、LDS、ADD、ADC、INC、SUB、SBB、DEC、CMP、MUL、DIV、AND、OR、XOR、NOT、TEST、SHL、SAL、SHR、SAR、ROL、ROR、RCL、RCR、LODS、MOVS 的例题。这些例题展示了每条指令的用法及其作用。 1. MOV 指令 MOV AX, BX ; 将寄存器 B…...

Mysql学习(七)——约束
文章目录 四、约束4.1 概述4.2 约束演示4.3 外键约束 总结 四、约束 4.1 概述 概念:约束是作用于表中字段上的规则,用于限制存储在表中的数据。目的:保证数据库中数据的正确、有效性和完整性。分类: 4.2 约束演示 根据需求&…...

Redis实战篇02
1.分布式锁Redisson 简单介绍: 使用setnx可能会出现的极端问题: Redisson的简介: 简单的使用: 业务代码的改造: private void handleVoucherOrder(VoucherOrder voucherOrder) {Long userId voucherOrder.getUserI…...
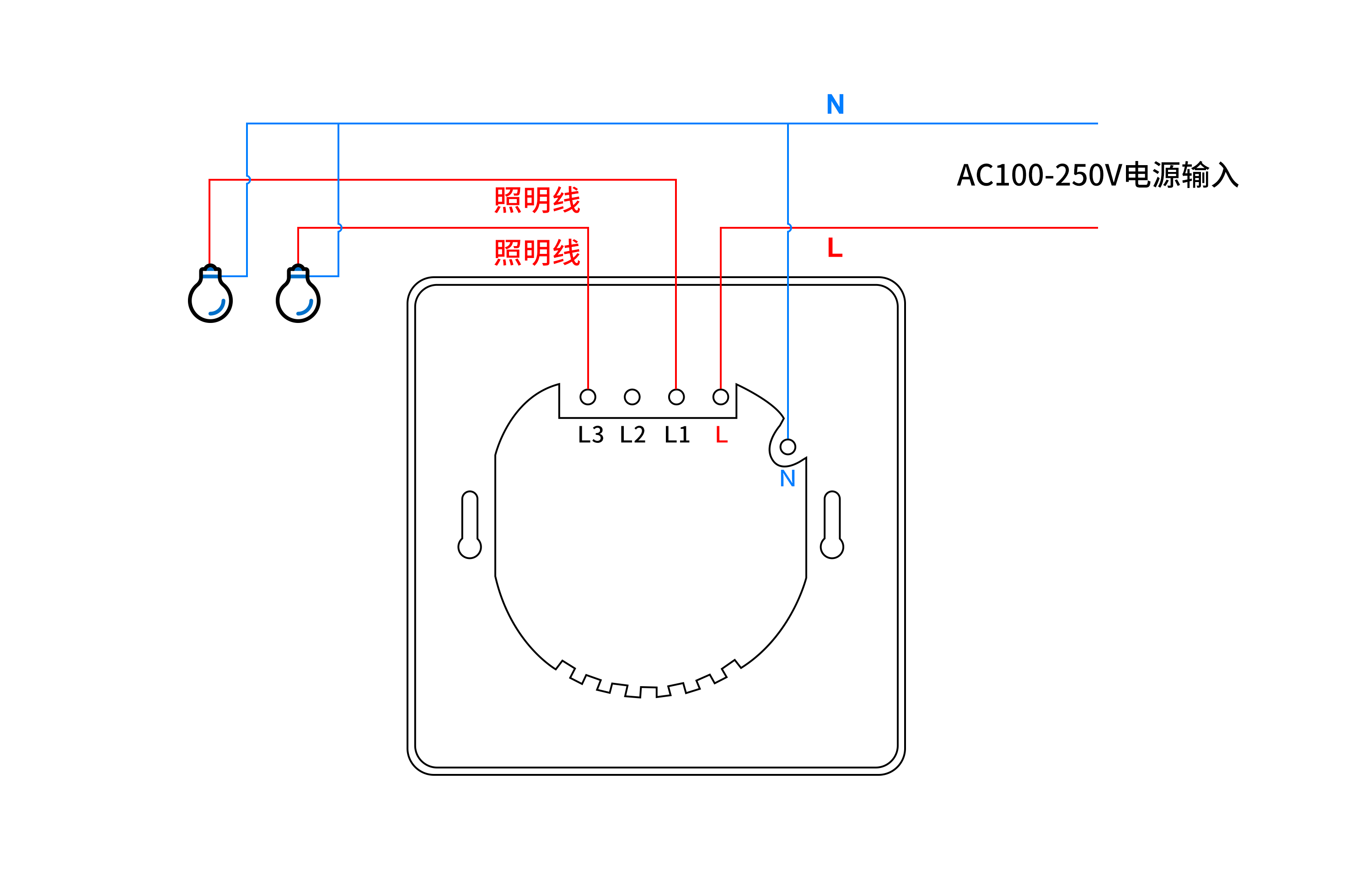
怎么用PHP语言实现远程控制两路照明开关
怎么用PHP语言实现远程控制两路开关呢? 本文描述了使用PHP语言调用HTTP接口,实现控制两路开关,两路开关可控制两路照明、排风扇等电器。 可选用产品:可根据实际场景需求,选择对应的规格 序号设备名称厂商1智能WiFi墙…...

Docker面试整理-什么是多阶段构建?它的好处是什么?
多阶段构建是 Docker 在 Dockerfile 中引入的一个功能,允许你在单个 Dockerfile 中使用多个构建阶段,但最终只生成一个轻量级的镜像。这是通过在一个 Dockerfile 中定义多个 FROM 指令来实现的,每个 FROM 指令都可以使用不同的基础镜像,并开始一个新的构建阶段。 多阶段构建…...
ENSP校园网设计实验
前言 哈喽,我是ICT大龙。本次更新了使用ENSP仿真软件设计校园网实验。时间比较着急,可能会有错误,欢迎大家指出。 获取本次工程文件方式在文章结束部分。 拓扑设计 拓扑介绍---A校区 如图,XYZ大学校园网设计分为3部分࿰…...
【Spring框架全系列】SpringBoot_3种配置文件_yml语法_多环境开发配置_配置文件分类(详细)
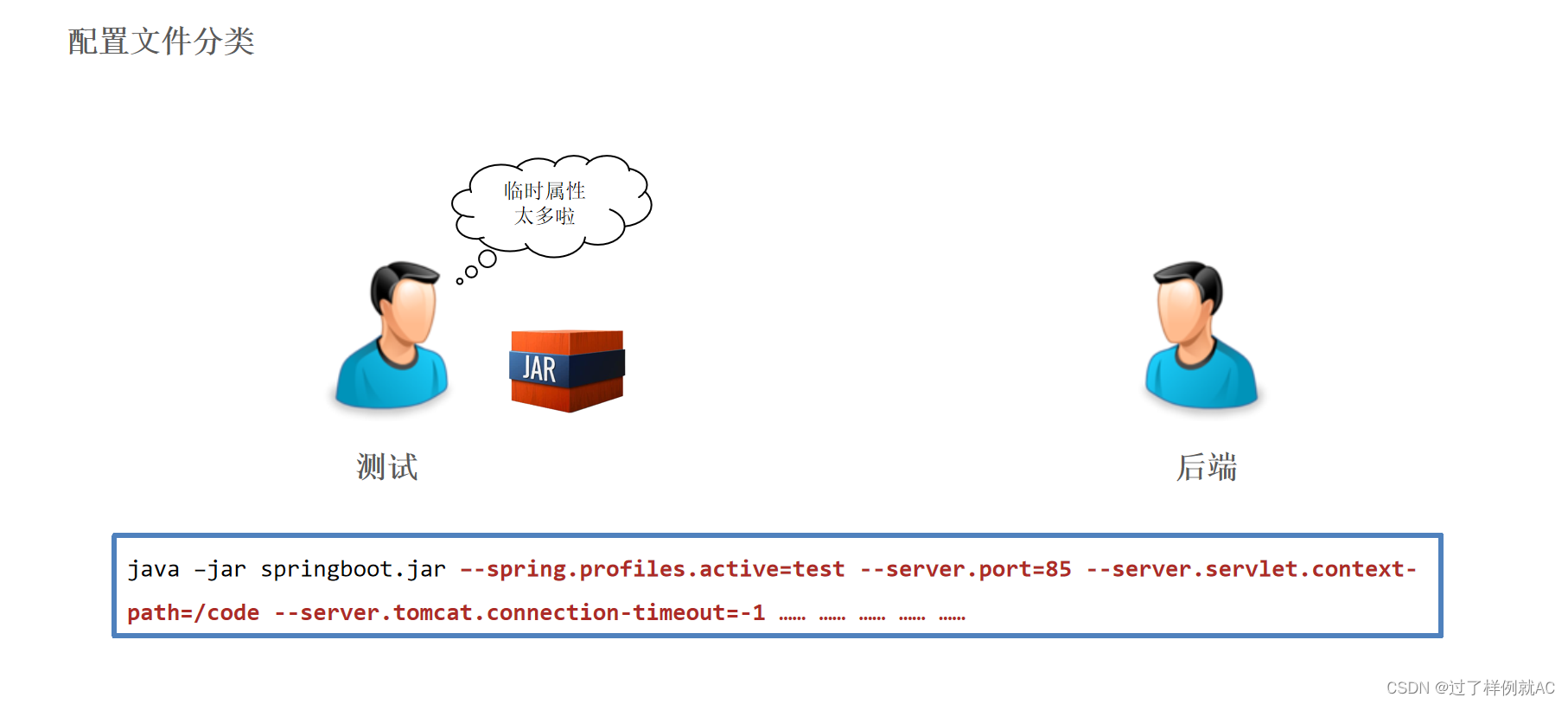
文章目录 1.三种配置文件2. yaml语法2.1 yaml语法规则2.2 yaml数组数据2.3 yaml数据读取 3. 多环境开发配置3.1 多环境启动配置3.2 多环境启动命令格式3.3 多环境开发控制 4. 配置文件分类 1.三种配置文件 问题导入 框架常见的配置文件有哪几种形式? 比如…...

华为坤灵路由器初始化的几个坑,含NAT配置
1、aaa密码复杂度修改: #使能设备对密码进行四选三复杂度检查功能。 <HUAWEI>system-view [HUAWEI]aaa [HUAWEI-aaa]local-aaa-user password policy administrator [HUAWEI-aaa-lupp-admin]password complexity three-of-kinds 2、本地用户名长度必须大…...

【RAG入门教程04】Langchian的文档切分
在 Langchain 中,文档转换器是一种在将文档提供给其他 Langchain 组件之前对其进行处理的工具。通过清理、处理和转换文档,这些工具可确保 LLM 和其他 Langchain 组件以优化其性能的格式接收数据。 上一章我们了解了文档加载器,加载完文档之…...
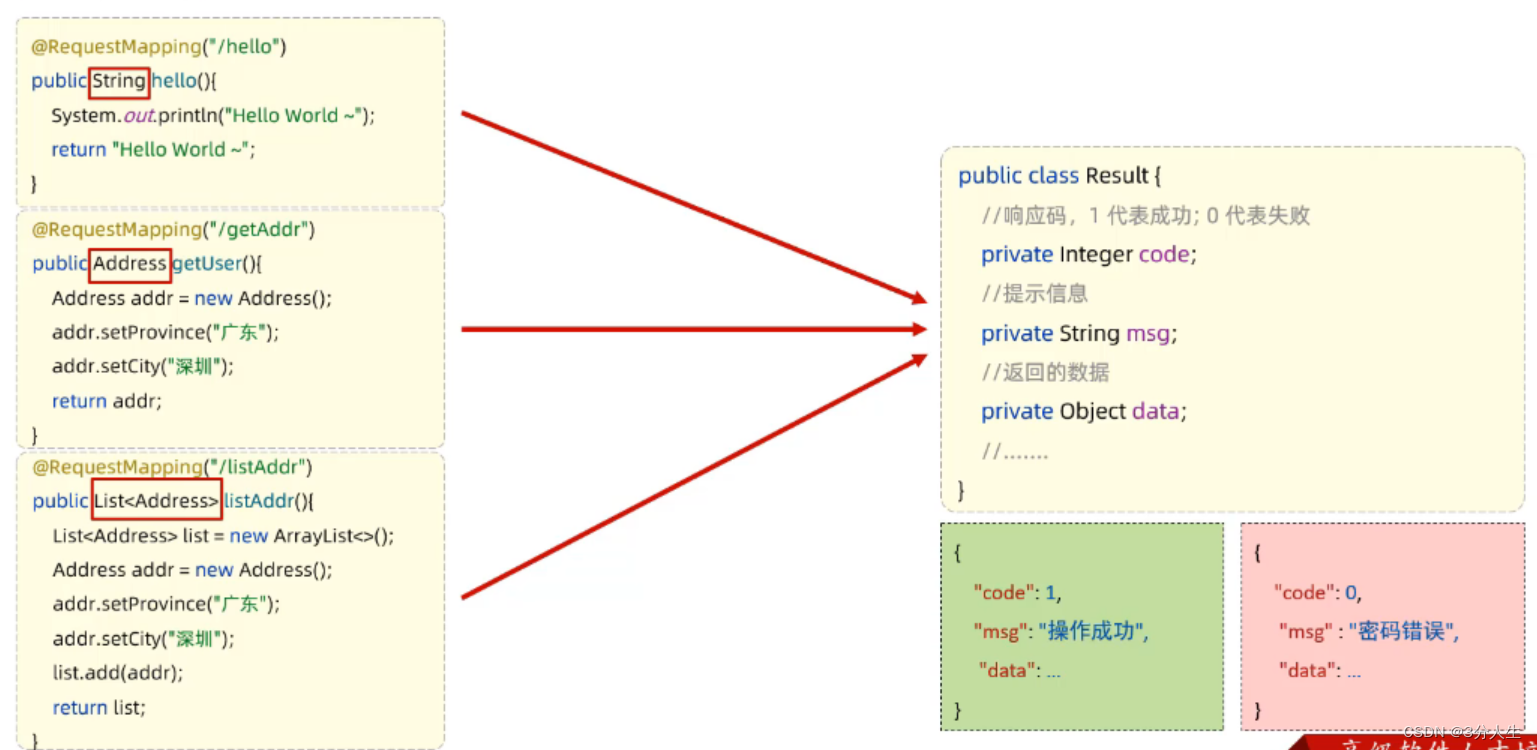
请求 响应
在web的前后端分离开发过程中,前端发送请求给后端,后端接收请求,响应数据给前端 请求 前端发送数据进行请求 简单参数 原始方式 在原始的web程序中,获取请求参数,需要通过HttpServletRequest 对象手动获取。 代码…...

AI智能体架构设计:从成本黑洞到价值引擎的解耦之道
1. 从成本黑洞到价值引擎:为什么你的AI智能体架构正在吞噬预算又到了季度技术复盘会,财务那边递过来的云账单和工程人力成本,是不是又让你倒吸一口凉气?你看着报表上那个名为“AI智能体平台”的项目,它的资源消耗曲线几…...

无机布防火卷帘门价格怎么算?按尺寸定制,按需报价
无机布防火卷帘门作为建筑防火分区的核心设备,价格一直是工程采购的关注重点。很多用户在询价时,会发现不同厂家的报价差异较大,这是因为无机布防火卷帘门的价格并非按统一单价计算,而是完全根据项目的实际需求定制化核算。 &…...

SwitchyOmega+Burp无感抓包实战:解决HTTPS拦截与流量路由难题
1. 为什么“无感抓包”是BurpSuite日常使用的分水岭刚接触Web安全测试的朋友常有个错觉:装上Burp Suite,配好代理,打开浏览器,点几下网页——流量就该自动进来了。结果现实是:首页打不开、登录态丢失、HTTPS报错满屏、…...

解决Claude Code访问不稳定与Token不足的痛点
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 解决Claude Code访问不稳定与Token不足的痛点 许多开发者将Claude Code作为日常编程的得力助手,用于代码生成、问题调试…...

Taotoken平台快速获取APIKey并开始你的第一个Python调用示例
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken平台快速获取APIKey并开始你的第一个Python调用示例 1. 准备工作:注册与登录 要开始使用Taotoken,…...

Unity发行版DLL调试实战:DnSpy无源码IL级断点指南
1. 这不是“反编译”,而是Unity游戏开发者的日常调试手段你有没有遇到过这样的情况:接手一个Unity发行版游戏,想快速验证某个功能逻辑是否按预期执行,或者排查一个偶发的崩溃,但手头只有打包后的Assembly-CSharp.dll&a…...

基于雷达与光敏传感器的低功耗智能窗防设备设计与实现
1. 项目概述:一个基于雷达与光敏的智能窗防设备几年前,我因为一次短暂的出差,家里空置了几天,回来后就一直琢磨着怎么给家里的窗户加点“动静”。市面上的智能安防摄像头固然好,但要么需要复杂的布线,要么云…...

风控系统如何全维度识别爬虫:IP、账号与行为的协同决策机制
1. 这不是“反爬失败”,而是风控系统在对你做全维度画像你写完一段 requests BeautifulSoup 的代码,本地跑通了,开开心心部署到服务器,结果第二天早上发现:所有请求返回 403,日志里全是空响应;…...

php有什么版本,php语言有几个版本
php有什么版本,php语言有几个版本PHP的大版本主要分四支:PHP4/PHP5/PHP6/PHP7 其中,PHP4由于太古老、对OO支持不力已基本被淘汰,请无视PHP4。 PHP6由于基本没有生产线上的应用,还基本只是一款概念产品,很多功能已在PHP…...

2026论文顶级降AI率工具大曝光:一键把AIGC率降至安全线!
步入2026年,学术圈的规则已经彻底变了味。过去那种只盯着查重率的“降重焦虑”早就被更可怕的“降AI焦虑”取代了。AI检测算法越来越聪明,高校审核标准也越来越严苛,光是把重复率压下去已经完全不够用了。现在摆在学生和科研人员面前的难题是…...