2016-2023 年美国农业部作物序列边界
简介
2016-2023 年美国农业部作物序列边界
作物序列边界(CSB)是与美国农业部经济研究局合作开发的,它提供了美国毗连地区的田间边界、作物种植面积和作物轮作的估计数据。该数据集利用卫星图像和其他公共数据,并且是开放源码的,使用户能够对美国种植的商品进行面积和统计分析。它为农民的种植决策和实践提供了宝贵的见解。
NASS 需要一个有代表性的田间数据集来预测玉米-大豆等常见轮作的作物种植情况,而经济研究局 (ERS) 则利用 CSB 来研究耕作和覆盖种植等农场管理方法随时间推移而发生的变化。CSB 数据集代表特定时间范围内的非机密单一作物田边界。它不包括个人身份信息、所有权边界或地块。数据来源于卫星图像和公开信息,不包括生产者或农业服务局等机构提供的信息。如需访问和了解更多信息,请访问CSB 网站。访问 CSB GitHub 代码库,查看与数据集相关的元数据。
https://github.com/USDA-REE-NASS/crop-sequence-boundaries/tree/main/csb-project
数据集说明
作物序列边界(CSB)是通过地理空间算法生成的田间多边形,源自 NASS 耕地数据层(CDL)。这些多边形实体满足了依赖网格数据集的应用需求,需要分析单位来简化数据汇总。CSB 的主要目标是提供横跨美国 48 个毗连区的全面覆盖范围,确保多年数据的精确性和可复制性。这些结构是通过合并指定时间范围内的历史 CDL 而形成的,同时还整合了公路和铁路网络,以准确描绘这些模拟田地内的作物序列。该数据集适用于 2016 年至 2023 年的生长季节。
数据集结构与预处理
数据集作为地球引擎中的特征集提供给每个州,1623 个特征集代表 2016-2023 年的生长季节。州名是特征集合名称的一部分。虽然可能没有必要,但可以将它们合并为一个集合,我创建了这个集合,供那些希望在合并的特征集合上运行一些分析的人使用。
单一代码
///
/$$$$$$$/ Create menus for states and counties $$$$$$/
---------- Author: Dr. Zhe Li -------------
///=================== USDA NASS SARS ===================/
//////
//$$$$$$$/ Host and Query CSBs $$$$$$/
---------- Author: Arthur Rosales -------------
///=================== USDA NASS SARS ===================/
////*Global Variable*/var csb23;
var empty1;
var fills1;
var filledOutlines1;
var empty2;
var fills2;
var image1;/*---------------------LOAD State and County features ----------------------------*/
var us_states = ee.FeatureCollection("TIGER/2018/States"),counties = ee.FeatureCollection("TIGER/2018/Counties");/*-----------------------LOAD CSB FILES FROM ASSETS ------------------------------*/var styling = {color: 'red',fillColor: '00000000',width: 2
};
var styling_co = {color: 'white',fillColor: '00000000',width: 0.5
};var csbal23 = ee.FeatureCollection("projects/nass-csb/assets/csb1623/CSBAL1623");var csbar23 = ee.FeatureCollection("projects/nass-csb/assets/csb1623/CSBAR1623");var csbaz23 = ee.FeatureCollection("projects/nass-csb/assets/csb1623/CSBAZ1623");var csbca23 = ee.FeatureCollection("projects/nass-csb/assets/csb1623/CSBCA1623");var csbco23 = ee.FeatureCollection("projects/nass-csb/assets/csb1623/CSBCO1623");var csbct23 = ee.FeatureCollection("projects/nass-csb/assets/csb1623/CSBCT1623");var csbde23 = ee.FeatureCollection("projects/nass-csb/assets/csb1623/CSBDE1623");var csbga23 = ee.FeatureCollection("projects/nass-csb/assets/csb1623/CSBGA1623");var csbfl23 = ee.FeatureCollection("projects/nass-csb/assets/csb1623/CSBFL1623");var csbia23 = ee.FeatureCollection("projects/nass-csb/assets/csb1623/CSBIA1623");var csbid23 = ee.FeatureCollection("projects/nass-csb/assets/csb1623/CSBID1623");var csbil23 = ee.FeatureCollection("projects/nass-csb/assets/csb1623/CSBIL1623");var csbin23 = ee.FeatureCollection("projects/nass-csb/assets/csb1623/CSBIN1623");var csbks23 = ee.FeatureCollection("projects/nass-csb/assets/csb1623/CSBKS1623");var csbky23 = ee.FeatureCollection("projects/nass-csb/assets/csb1623/CSBKY1623");var csbla23 = ee.FeatureCollection("projects/nass-csb/assets/csb1623/CSBLA1623");var csbma23 = ee.FeatureCollection("projects/nass-csb/assets/csb1623/CSBMA1623");var csbmd23 = ee.FeatureCollection("projects/nass-csb/assets/csb1623/CSBMD1623");var csbme23 = ee.FeatureCollection("projects/nass-csb/assets/csb1623/CSBME1623");var csbmi23 = ee.FeatureCollection("projects/nass-csb/assets/csb1623/CSBMI1623");var csbmn23 = ee.FeatureCollection("projects/nass-csb/assets/csb1623/CSBMN1623");var csbmo23 = ee.FeatureCollection("projects/nass-csb/assets/csb1623/CSBMO1623");var csbms23 = ee.FeatureCollection("projects/nass-csb/assets/csb1623/CSBMS1623");var csbmt23 = ee.FeatureCollection("projects/nass-csb/assets/csb1623/CSBMT1623");var csbne23 = ee.FeatureCollection("projects/nass-csb/assets/csb1623/CSBNE1623");var csbnh23 = ee.FeatureCollection("projects/nass-csb/assets/csb1623/CSBNH1623");var csbnj23 = ee.FeatureCollection("projects/nass-csb/assets/csb1623/CSBNJ1623");var csbnm23 = ee.FeatureCollection("projects/nass-csb/assets/csb1623/CSBNM1623");var csbnv23 = ee.FeatureCollection("projects/nass-csb/assets/csb1623/CSBNV1623");var csbny23 = ee.FeatureCollection("projects/nass-csb/assets/csb1623/CSBNY1623");var csbnc23 = ee.FeatureCollection("projects/nass-csb/assets/csb1623/CSBNC1623");var csbnd23 = ee.FeatureCollection("projects/nass-csb/assets/csb1623/CSBND1623");var csboh23 = ee.FeatureCollection("projects/nass-csb/assets/csb1623/CSBOH1623");var csbok23 = ee.FeatureCollection("projects/nass-csb/assets/csb1623/CSBOK1623");var csbor23 = ee.FeatureCollection("projects/nass-csb/assets/csb1623/CSBOR1623");var csbpa23 = ee.FeatureCollection("projects/nass-csb/assets/csb1623/CSBPA1623");var csbri23 = ee.FeatureCollection("projects/nass-csb/assets/csb1623/CSBRI1623");var csbsc23 = ee.FeatureCollection("projects/nass-csb/assets/csb1623/CSBSC1623");var csbsd23 = ee.FeatureCollection("projects/nass-csb/assets/csb1623/CSBSD1623");var csbtn23 = ee.FeatureCollection("projects/nass-csb/assets/csb1623/CSBTN1623");var csbtx23 = ee.FeatureCollection("projects/nass-csb/assets/csb1623/CSBTX1623");var csbut23 = ee.FeatureCollection("projects/nass-csb/assets/csb1623/CSBUT1623");var csbvt23 = ee.FeatureCollection("projects/nass-csb/assets/csb1623/CSBVT1623");var csbva23 = ee.FeatureCollection("projects/nass-csb/assets/csb1623/CSBVA1623");var csbwa23 = ee.FeatureCollection("projects/nass-csb/assets/csb1623/CSBWA1623");var csbwv23 = ee.FeatureCollection("projects/nass-csb/assets/csb1623/CSBWV1623");var csbwi23 = ee.FeatureCollection("projects/nass-csb/assets/csb1623/CSBWI1623");var csbwy23 = ee.FeatureCollection("projects/nass-csb/assets/csb1623/CSBWY1623");var istate = {Alabama: [csbal23, 'CDL2023', 'CDL2022', 'CDL2021', 'CDL2020', 'CDL2019', 'CDL2018', 'CDL2017', 'CDL2016', 2023, "01", 'ACRES', 'CROP23', 'CROP22', 'CROP21', 'CROP20', 'CROP19', 'CROP18', 'CROP17', 'CROP16'],Arkansas: [csbar23, 'CDL2023', 'CDL2022', 'CDL2021', 'CDL2020', 'CDL2019', 'CDL2018', 'CDL2017', 'CDL2016', 2023, "05", 'ACRES', 'CROP23', 'CROP22', 'CROP21', 'CROP20', 'CROP19', 'CROP18', 'CROP17', 'CROP16'],Arizona: [csbaz23, 'CDL2023', 'CDL2022', 'CDL2021', 'CDL2020', 'CDL2019', 'CDL2018', 'CDL2017', 'CDL2016', 2023, "04", 'ACRES', 'CROP23', 'CROP22', 'CROP21', 'CROP20', 'CROP19', 'CROP18', 'CROP17', 'CROP16'],California: [csbca23, 'CDL2023', 'CDL2022', 'CDL2021', 'CDL2020', 'CDL2019', 'CDL2018', 'CDL2017', 'CDL2016', 2023, "06", 'ACRES', 'CROP23', 'CROP22', 'CROP21', 'CROP20', 'CROP19', 'CROP18', 'CROP17', 'CROP16'],Colorado: [csbco23, 'CDL2023', 'CDL2022', 'CDL2021', 'CDL2020', 'CDL2019', 'CDL2018', 'CDL2017', 'CDL2016', 2023, "08", 'ACRES', 'CROP23', 'CROP22', 'CROP21', 'CROP20', 'CROP19', 'CROP18', 'CROP17', 'CROP16'],Connecticut: [csbct23, 'CDL2023', 'CDL2022', 'CDL2021', 'CDL2020', 'CDL2019', 'CDL2018', 'CDL2017', 'CDL2016', 2023, "09", 'ACRES', 'CROP23', 'CROP22', 'CROP21', 'CROP20', 'CROP19', 'CROP18', 'CROP17', 'CROP16'],Delaware: [csbde23, 'CDL2023', 'CDL2022', 'CDL2021', 'CDL2020', 'CDL2019', 'CDL2018', 'CDL2017', 'CDL2016', 2023, "10", 'ACRES', 'CROP23', 'CROP22', 'CROP21', 'CROP20', 'CROP19', 'CROP18', 'CROP17', 'CROP16'],Florida: [csbfl23, 'CDL2023', 'CDL2022', 'CDL2021', 'CDL2020', 'CDL2019', 'CDL2018', 'CDL2017', 'CDL2016', 2023, "12", 'ACRES', 'CROP23', 'CROP22', 'CROP21', 'CROP20', 'CROP19', 'CROP18', 'CROP17', 'CROP16'],Georgia: [csbga23, 'CDL2023', 'CDL2022', 'CDL2021', &#相关文章:

2016-2023 年美国农业部作物序列边界
简介 2016-2023 年美国农业部作物序列边界 作物序列边界(CSB)是与美国农业部经济研究局合作开发的,它提供了美国毗连地区的田间边界、作物种植面积和作物轮作的估计数据。该数据集利用卫星图像和其他公共数据,并且是开放源码的,使用户能够对美国种植的商品进行面积和统计…...

数字人源码部署怎么做?如何高效搭建好用的数字人系统?
作为人工智能时代的风口项目,AI数字人自出现之日起便引发了大量的关注。不少创业者都有了搭建数字人系统的想法,但却苦于没有强大的专业背景和雄厚资金支撑,只能在局外徘徊,而这恰恰为数字人源码公司推出的数字人源码部署服务的火…...
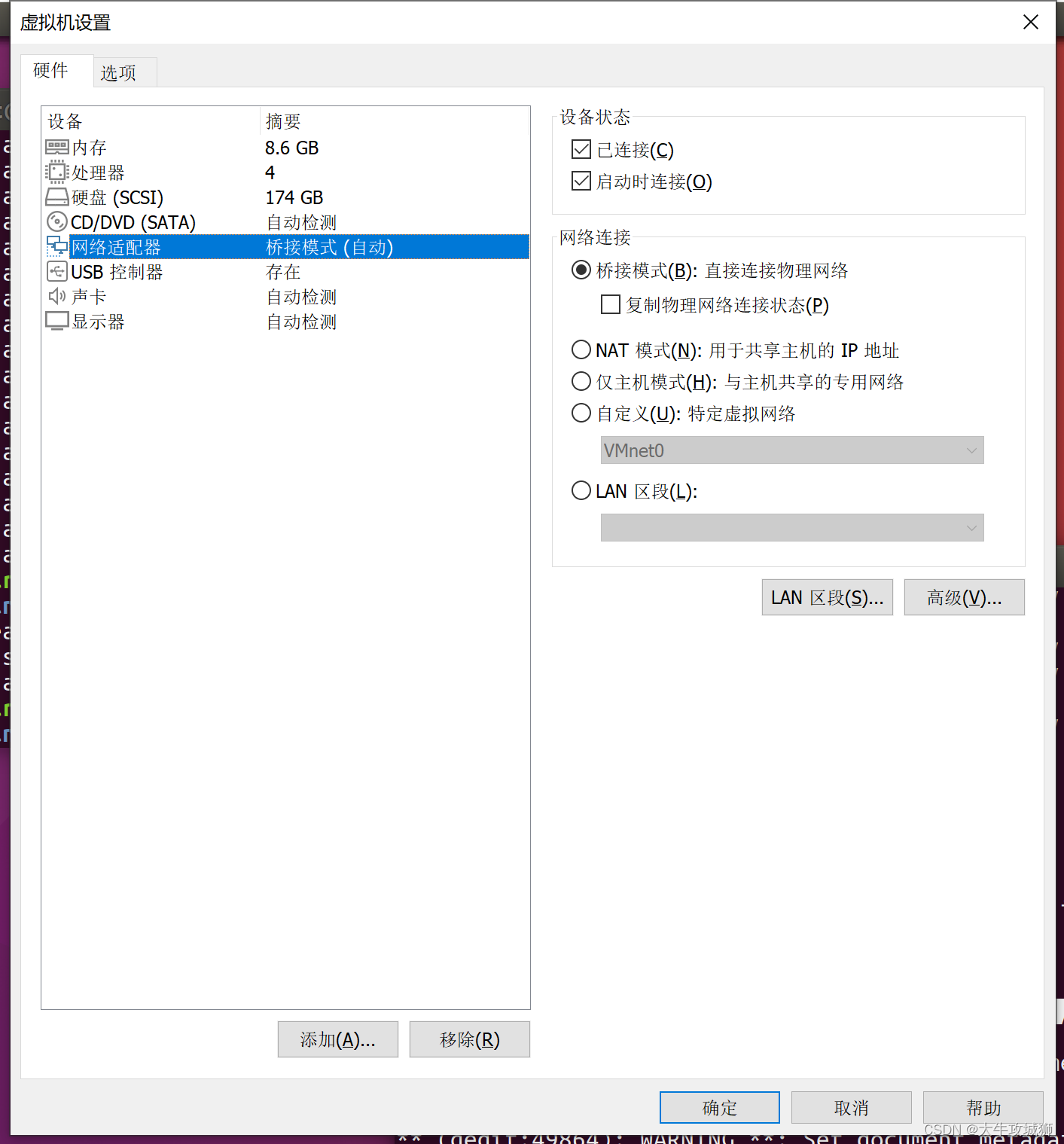
解决虚拟机Ubuntu IP总是掉的问题
问题 嵌入式开发过程中,需要使用NFS/TFTP等等,虚拟机Ubuntu就需要和板卡进行网络连接,但是我发现虚拟机Ubuntu的IP地址经常动不动就掉线,本文记录解决该问题的一些思路。 其实这个问题很简单,我早该想到,…...

[13] CUDA_Opencv联合编译过程
CUDA_Opencv联合编译过程 详细编译过程可见我之前的文章:Win10下OpencvCUDA联合编译详细教程(版本455、460、470,亲测可用!!!)本文给出Windows\linux下的opencvcuda的编译总结,摘自 <基于GP…...

uni-app canvas创建画布
canvasTmp: function(arr2, store_name, successFn, errFun) {let that this;const ctx uni.createCanvasContext(myCanvas);ctx.clearRect(0, 0, 0, 0);/*** 只能获取合法域名下的图片信息,本地调试无法获取* */uni.getImageInfo({ src: arr2[0],success: function(res) {…...
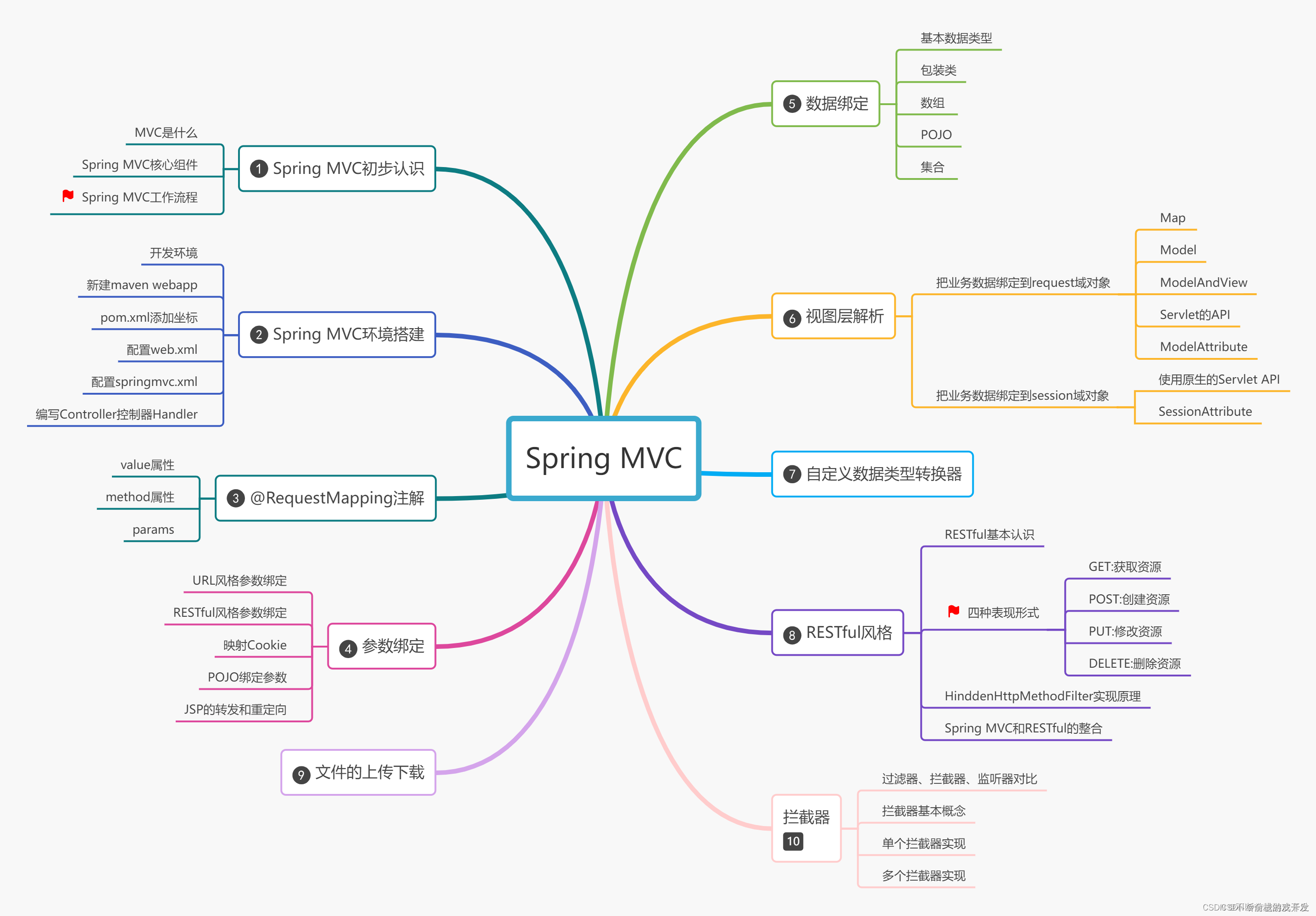
Spring MVC详解(上)
一、Spring MVC初步认识 1.1介绍 Spring MVC是Spring Framework提供的Web组件,全称是Spring Web MVC,是目前主流的实现MVC设计模式的框架,提供前端路由映射、视图解析等功能 Java Web开发者必须要掌握的技术框架 1.2MVC是什么 MVC是一种软件架构思想…...

【Linux硬盘读取】Windows下读取Linux系统的文件解决方案:Linux Reader4.5 By DiskInternals
前言 相信做机器视觉相关的很多人都会安装 Windows 和 Linux 双系统。在 Linux 下,我们可以很方便的访问Windows的磁盘,反过来却不行。但是这又是必须的。通过亲身体验,向大家推荐这么一个工具,可以让 Windows 方便的访问 Ext 2/3…...

操作系统—页表(实验)
文章目录 页表1.实验目标2.实验过程记录(1).增加打印页表函数(2).独立内核页表(3).简化软件模拟地址翻译 3.实验问题及相应解答问题1问题2问题3问题4 实验小结 页表 1.实验目标 了解xv6内核当中页表的实现原理,修改页表,使内核更方便地进行用户虚拟地址…...
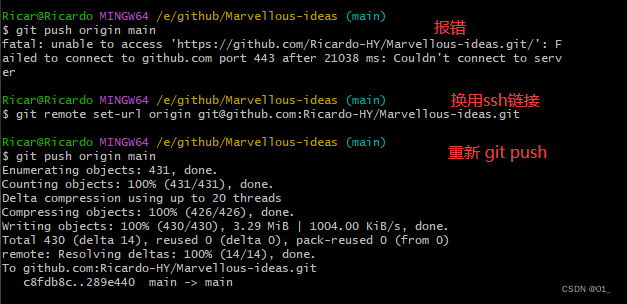
github 本地仓库上传及报错处理
一.本地文件上传 这里为上传部分,关于gitbash安装配置,读者可自行搜索,由于已经安装完成,未进行截图保存,这里便不做赘述。 1.登录git账号并创建一个仓库 点击仓库打开后会看到这个仓库的网址链接(这个链…...
)
【ZZULIOJ】1104: 求因子和(函数专题)
题目描述 输入正整数n(2<n<1000),计算并输出n的所有正因子(包括1,不包括自身)之和。要求程序定义一个FacSum ()函数和一个main()函数,FacSum ()函数计算并返回n的所有正因子之和,其余功能在main()函…...

轨迹优化 | 图解欧氏距离场与梯度场算法(附ROS C++/Python实现)
目录 0 专栏介绍1 什么是距离场?2 欧氏距离场计算原理3 双线性插值与欧式梯度场4 仿真实现4.1 ROS C实现4.2 Python实现 0 专栏介绍 🔥课程设计、毕业设计、创新竞赛、学术研究必备!本专栏涉及更高阶的运动规划算法实战:曲线生成…...

【二维差分】2132. 用邮票贴满网格图
本文涉及知识点 二维差分 LeetCode2132. 用邮票贴满网格图 给你一个 m x n 的二进制矩阵 grid ,每个格子要么为 0 (空)要么为 1 (被占据)。 给你邮票的尺寸为 stampHeight x stampWidth 。我们想将邮票贴进二进制矩…...
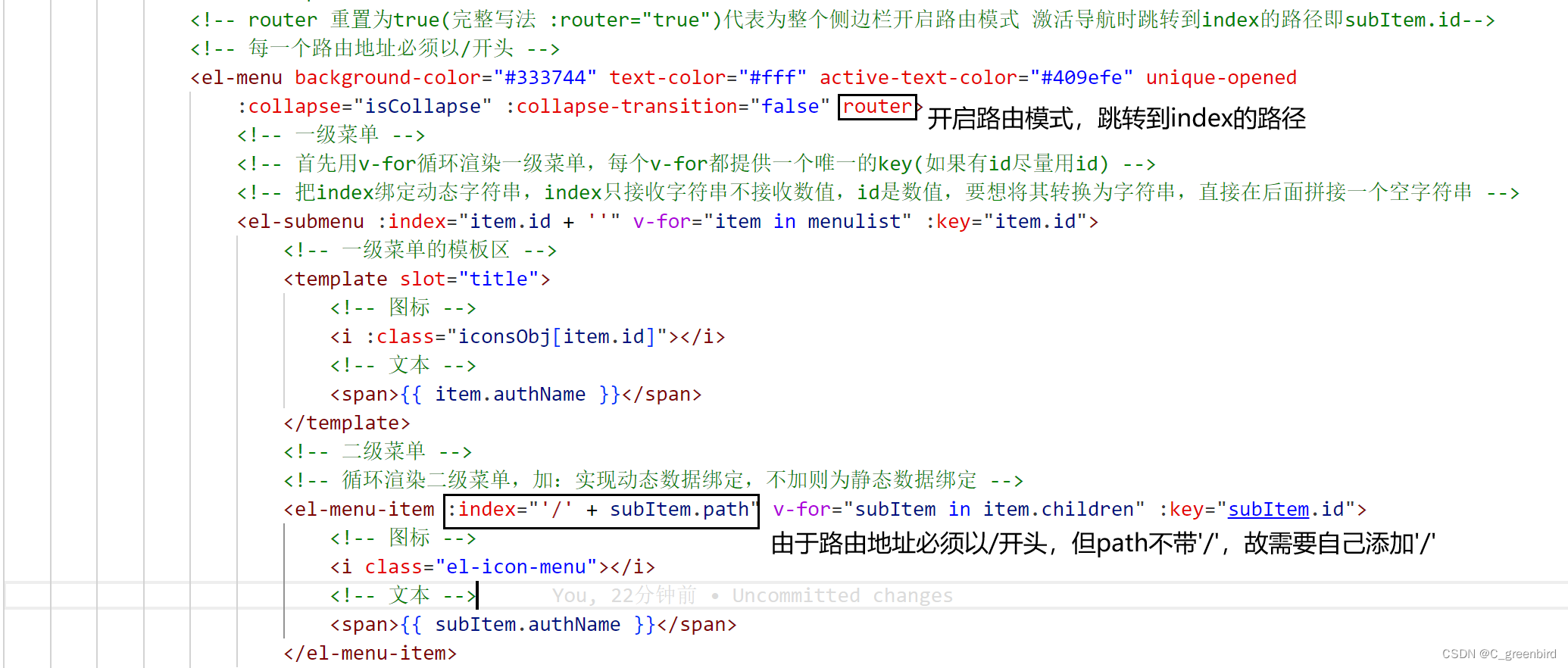
【前端项目笔记】2 主页布局
主页布局 element-ui提供的组件名称就是它的类名 ☆☆ CSS选择器: (1)基本选择器 类型选择器 p/span/div…… 类选择器 (.classname) ID选择器 (#idname) 通配选择器 ( * ) (2)属性选择器 选择具有特定属性或属性值的…...

t265 jetpack 6 px4 ros2
Ubuntu22.04 realsenseSDK2和ROS2Wrapper安装方法,包含T265版本踩坑问题_ros2 realsense-CSDN博客 210 git clone https://github.com/IntelRealSense/librealsense.git 212 git branch 215 git tag 218 git checkout v2.51.1 219 git branch 265 git clone https://…...
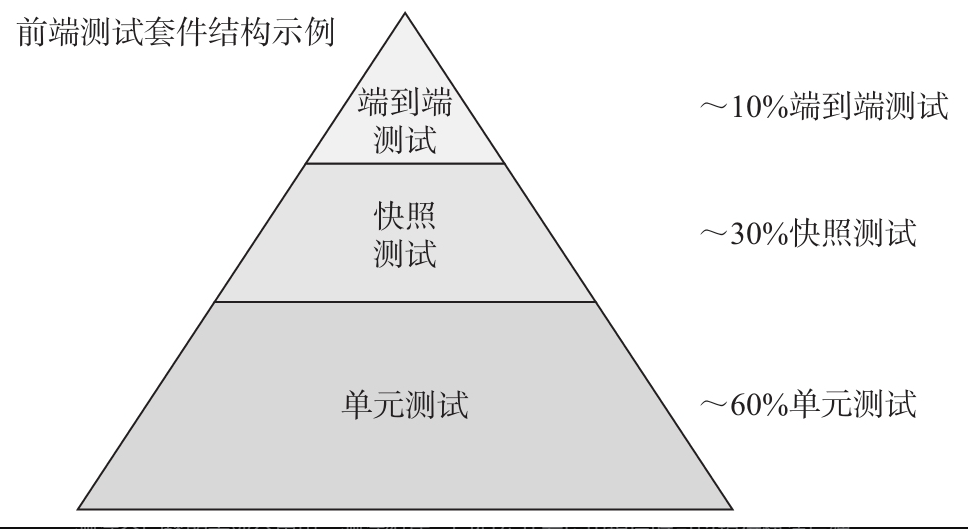
vue 应用测试(一) --- 介绍
vue 应用测试(一) ---介绍 前端测试简介组件测试Jest 测试框架简介其他测试框架 第一个测试避免误报如何组织测试代码 组件挂载Vue2 组件挂载的方式Vue3 的挂载方式vue-test-utils挂载选项 如何调试测试用例参考小结 前端测试简介 软件测试:…...

Perl 语言入门学习
一、介绍 Perl 是一种高级的、动态的、解释型的通用编程语言,由Larry Wall于1987年开发。它是一种非常灵活和强大的语言,广泛用于文本处理、系统管理、网络编程、图形编程等领域。 Perl 语言的设计理念是“用一种简单的语法,去解决复杂的编…...

HarmongOS打包[保姆级]
创建应用 首先进入 华为开发者联盟-HarmonyOS开发者官网 然后进行登录。 登录成功后,鼠标悬停在在登录右上角那个位置后再点击管理中心,进入下面这个界面。 再点击:应用服务–>应用发布–>新建–>完善信息 构建和生成私钥和证书请求…...

SpringBoot怎么实现自定义接口全局异常捕获?详细教程
自定义异常 package com.single.bean;import org.springframework.core.NestedRuntimeException;public class FDWException extends NestedRuntimeException {private static final long serialVersionUID = 6046035491210083235L;public FDWException(String msg) {super(msg…...
Ms08067安全实验室成功实施多家业务系统渗透测试项目
点击星标,即时接收最新推文 近日,Ms08067安全实验室针对多家公司重要系统实施渗透测试项目。公司网络信息系统的业务应用和存储的重要信息资产均较多,存在网络系统结构的复杂性和庞杂等特点,使得公司网络信息系统面临一定风险。项…...

小熊家政帮day22-day23 订单系统优化(订单状态机、练习分库分表、索引、订单缓存)
目录 1 状态机1.1 状态机介绍1.1.1 当前存在的问题1.1.2 使用状态机解决问题 1.2 实现订单状态机1.2.1 编写订单状态机1.2.1.1 依赖引入1.2.1.2 订单状态枚举类1.2.1.3 状态变更事件枚举类1.2.1.4 定义订单快照类1.2.1.5 定义事件变更动作类1.2.1.5 定义订单状态机类1.2.1.6 状…...

Linux链表操作全解析
Linux C语言链表深度解析与实战技巧 一、链表基础概念与内核链表优势1.1 为什么使用链表?1.2 Linux 内核链表与用户态链表的区别 二、内核链表结构与宏解析常用宏/函数 三、内核链表的优点四、用户态链表示例五、双向循环链表在内核中的实现优势5.1 插入效率5.2 安全…...
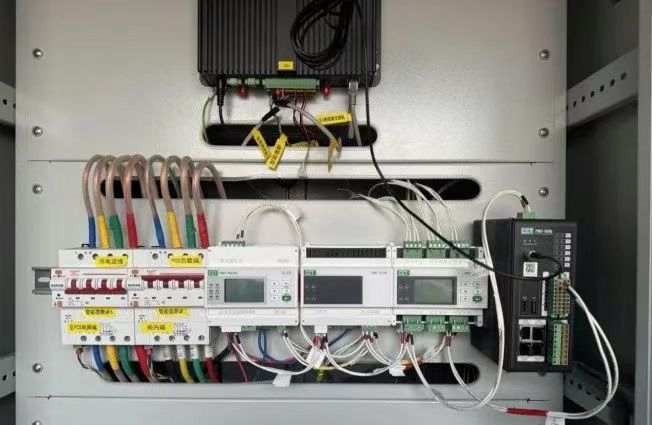
IT供电系统绝缘监测及故障定位解决方案
随着新能源的快速发展,光伏电站、储能系统及充电设备已广泛应用于现代能源网络。在光伏领域,IT供电系统凭借其持续供电性好、安全性高等优势成为光伏首选,但在长期运行中,例如老化、潮湿、隐裂、机械损伤等问题会影响光伏板绝缘层…...
)
.Net Framework 4/C# 关键字(非常用,持续更新...)
一、is 关键字 is 关键字用于检查对象是否于给定类型兼容,如果兼容将返回 true,如果不兼容则返回 false,在进行类型转换前,可以先使用 is 关键字判断对象是否与指定类型兼容,如果兼容才进行转换,这样的转换是安全的。 例如有:首先创建一个字符串对象,然后将字符串对象隐…...
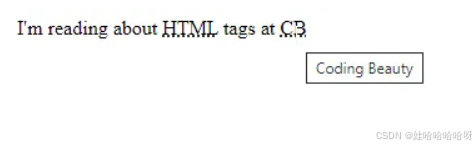
html-<abbr> 缩写或首字母缩略词
定义与作用 <abbr> 标签用于表示缩写或首字母缩略词,它可以帮助用户更好地理解缩写的含义,尤其是对于那些不熟悉该缩写的用户。 title 属性的内容提供了缩写的详细说明。当用户将鼠标悬停在缩写上时,会显示一个提示框。 示例&#x…...
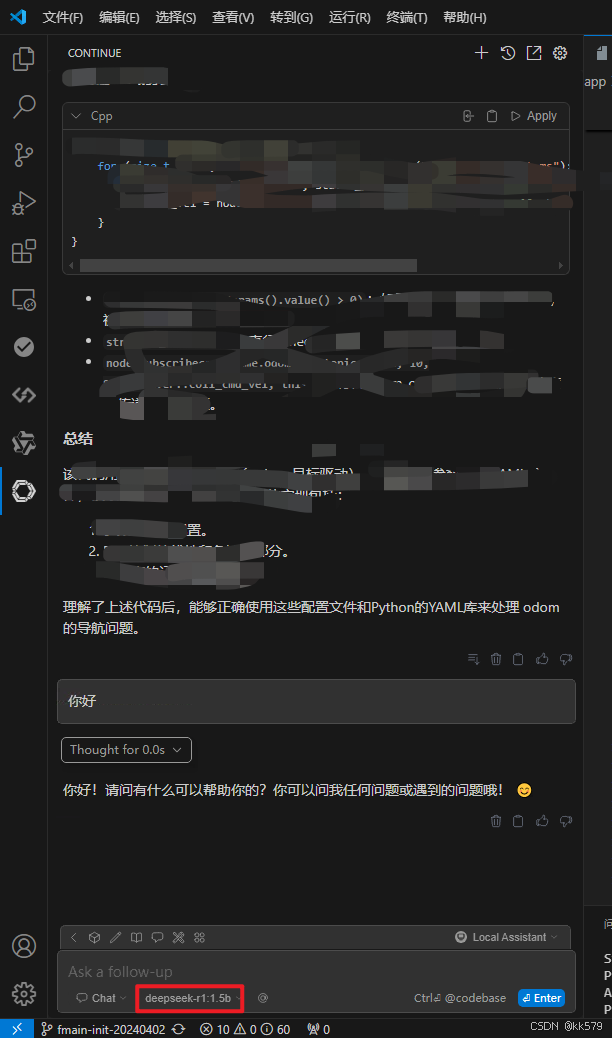
保姆级教程:在无网络无显卡的Windows电脑的vscode本地部署deepseek
文章目录 1 前言2 部署流程2.1 准备工作2.2 Ollama2.2.1 使用有网络的电脑下载Ollama2.2.2 安装Ollama(有网络的电脑)2.2.3 安装Ollama(无网络的电脑)2.2.4 安装验证2.2.5 修改大模型安装位置2.2.6 下载Deepseek模型 2.3 将deepse…...
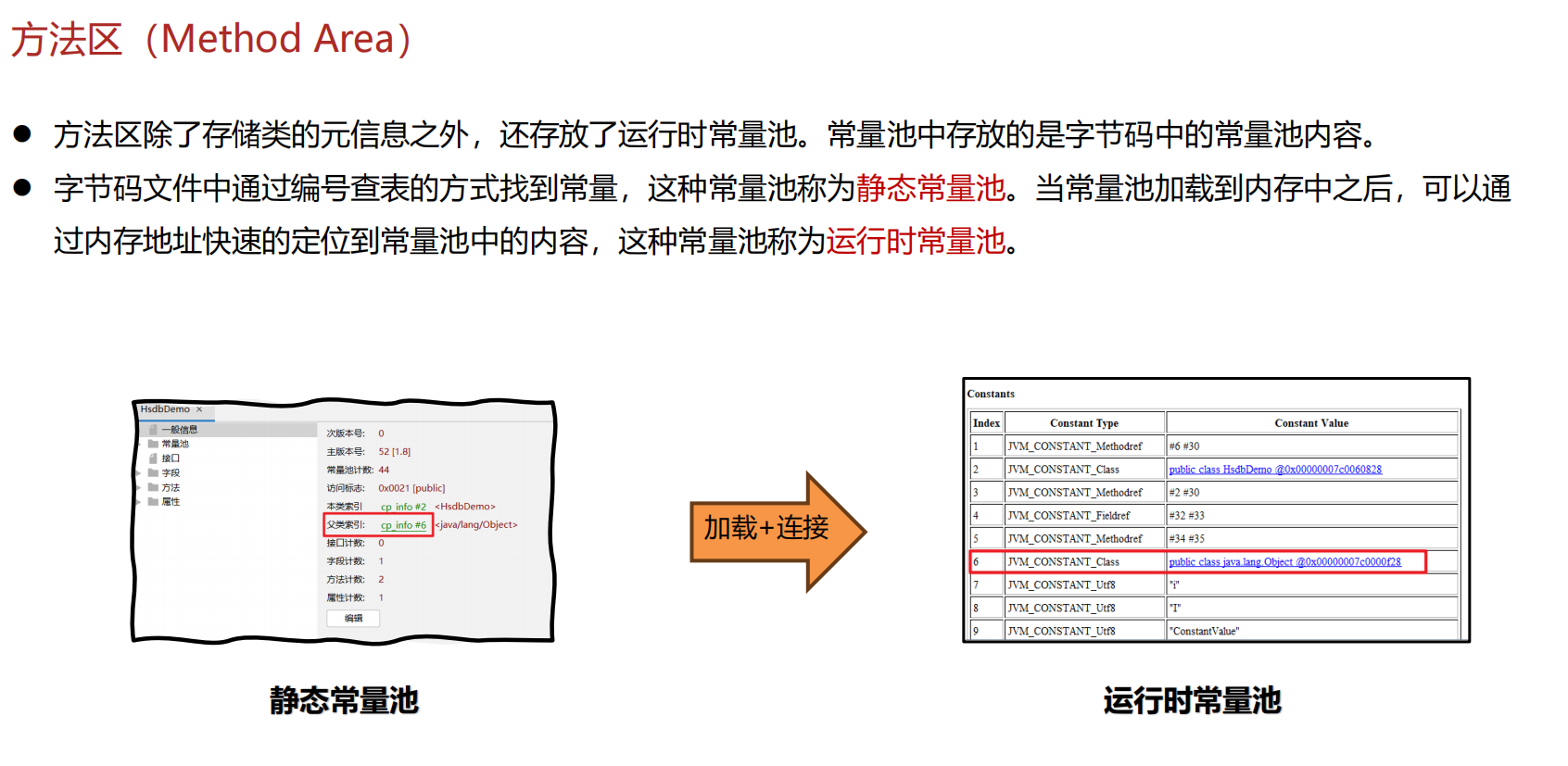
JVM 内存结构 详解
内存结构 运行时数据区: Java虚拟机在运行Java程序过程中管理的内存区域。 程序计数器: 线程私有,程序控制流的指示器,分支、循环、跳转、异常处理、线程恢复等基础功能都依赖这个计数器完成。 每个线程都有一个程序计数…...

Java编程之桥接模式
定义 桥接模式(Bridge Pattern)属于结构型设计模式,它的核心意图是将抽象部分与实现部分分离,使它们可以独立地变化。这种模式通过组合关系来替代继承关系,从而降低了抽象和实现这两个可变维度之间的耦合度。 用例子…...
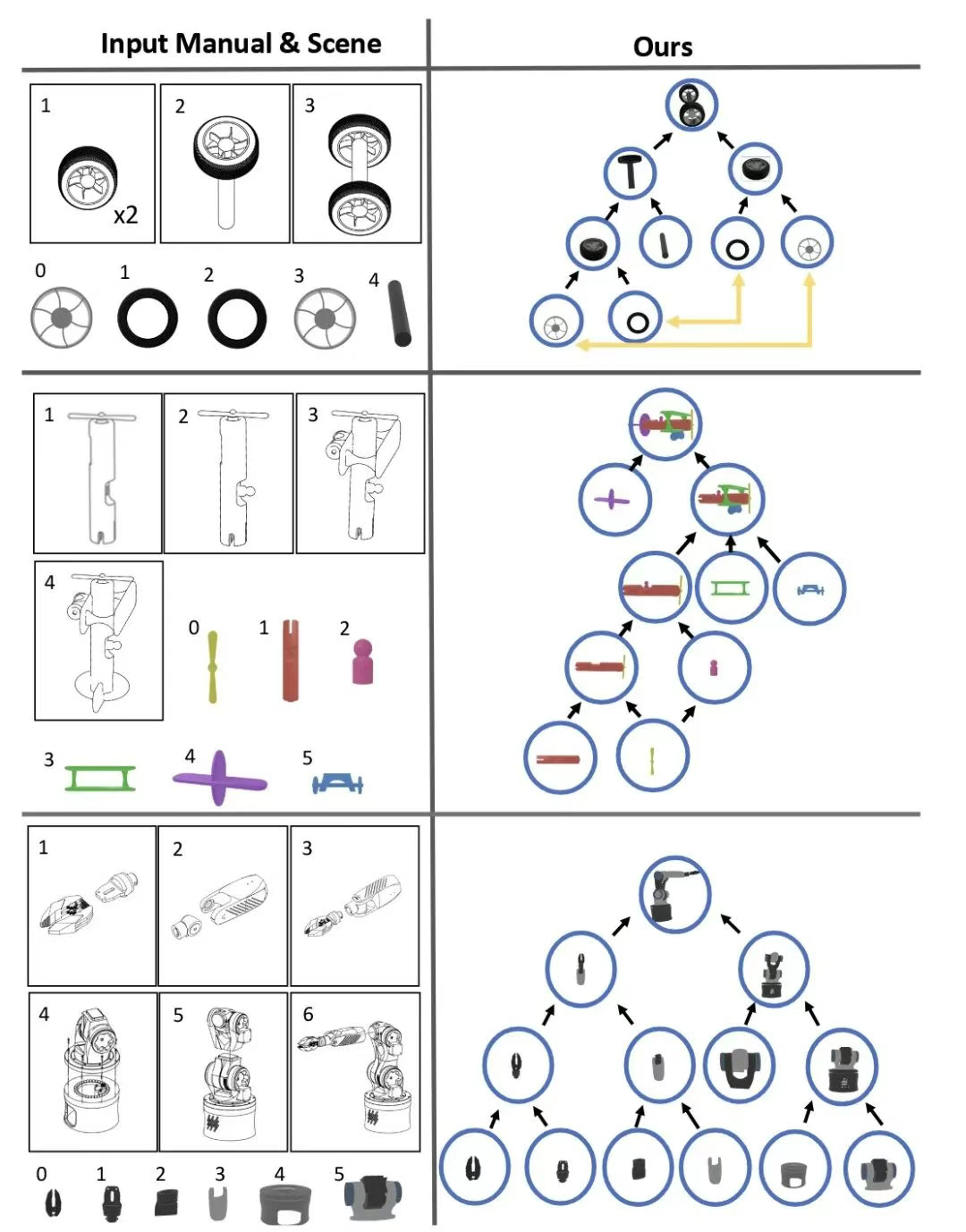
RSS 2025|从说明书学习复杂机器人操作任务:NUS邵林团队提出全新机器人装配技能学习框架Manual2Skill
视觉语言模型(Vision-Language Models, VLMs),为真实环境中的机器人操作任务提供了极具潜力的解决方案。 尽管 VLMs 取得了显著进展,机器人仍难以胜任复杂的长时程任务(如家具装配),主要受限于人…...
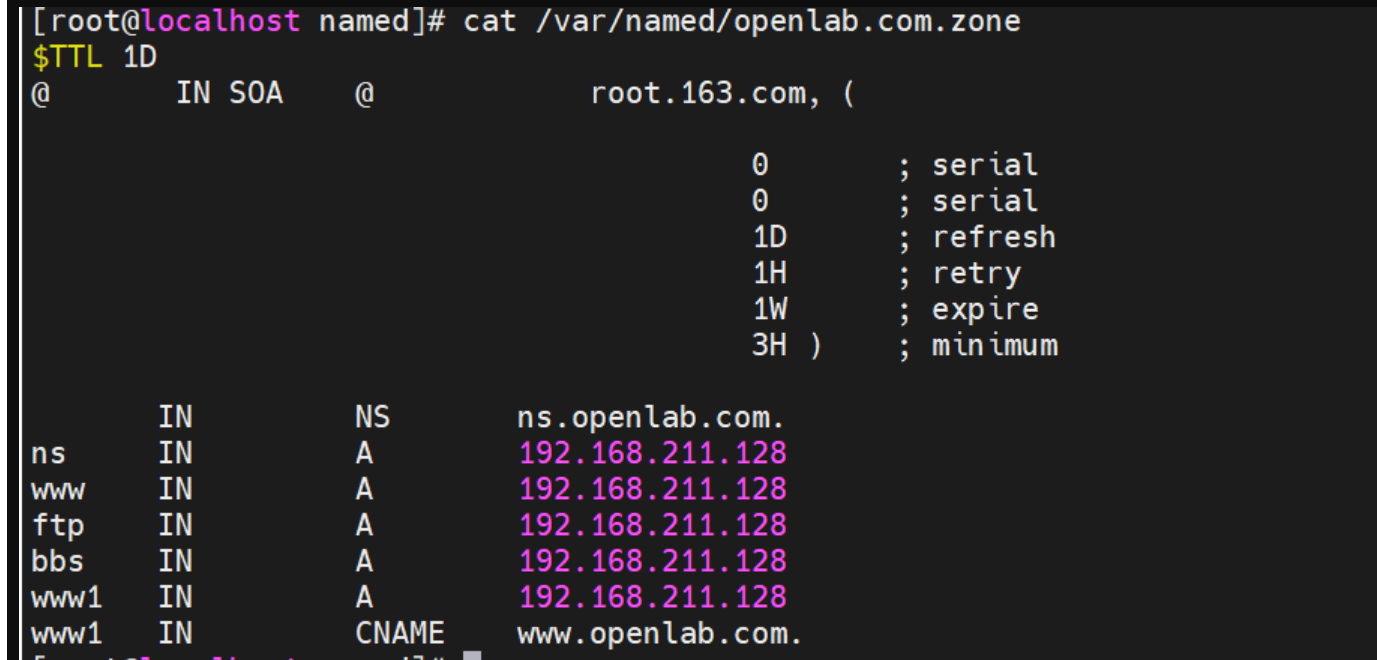
搭建DNS域名解析服务器(正向解析资源文件)
正向解析资源文件 1)准备工作 服务端及客户端都关闭安全软件 [rootlocalhost ~]# systemctl stop firewalld [rootlocalhost ~]# setenforce 0 2)服务端安装软件:bind 1.配置yum源 [rootlocalhost ~]# cat /etc/yum.repos.d/base.repo [Base…...
计算机基础知识解析:从应用到架构的全面拆解
目录 前言 1、 计算机的应用领域:无处不在的数字助手 2、 计算机的进化史:从算盘到量子计算 3、计算机的分类:不止 “台式机和笔记本” 4、计算机的组件:硬件与软件的协同 4.1 硬件:五大核心部件 4.2 软件&#…...