水下机器人ArduSub 固件常用参数
目前最新版的ArduSub 固件是4.1.2,本文的参数是基于这个版本的固件
SURFACE_DEPTH:水表深度读数
当水下机器人在水面时,水压传感器将读取的深度数据(以厘米为单位),这个相当于抵消零偏
- 单位:cm
- 范围:-100 0
SYSID_SW_MREV:Eeprom 格式版本号
当对 eeprom 格式进行更改时,此值将递增
- 只读:是
SYSID_THISMAV:该水下机器人的MAVLink系统ID
允许为此水下机器人设置单独的 MAVLink 系统 ID,以将其与同一网络上的其他水下机器人区分开来
- 范围:1 255
SYSID_MYGCS:地面站系统的ID
用于区分不同的地面
GCS_PID_MASK:GCS PID调谐
PID 的位掩码,用于发送 MAVLink PID_TUNING 消息,用以在地面站实时观察PID调谐的效果
| 值 | 意义 |
| 0 | 未使能 |
| 1 | 横滚 |
| 2 | 俯仰 |
| 4 | 偏航 |
RNGFND_GAIN:测距仪增益
用于调整在水下机器人下方感应到物体时改变目标高度的速度
- 范围:0.01 2.0
- 增量:0.01
FS_GCS_ENABLE:地面站通信丢失故障安全保护
控制当 GCS 检测信号丢失时要执行的操作。
| 值 | 意义 |
| 0 | 未使能 |
| 1 | 仅警告 |
| 2 | 加锁 |
| 3 | 进入定深模式 |
| 4 | 进入水面模式 |
FS_LEAK_ENABLE: 漏水安全保护
控制在检测到漏水时要采取的措施。
| 值 | 意义 |
| 0 | 未使能 |
| 1 | 仅警告 |
| 2 | 进入水面模式 |
FS_PRESS_ENABLE: 内部压力故障保护
控制当内部压力超过FS_PRESS_MAX参数时要采取的操作。
| 值 | 意义 |
| 0 | 未使能 |
| 1 | 仅警告 |
FS_TEMP_ENABLE: 内部温度故障保护保护
控制当内部温度超过FS_TEMP_MAX参数时要采取的操作。
| 值 | 意义 |
| 0 | 未使能 |
| 1 | 仅警告 |
FS_PRESS_MAX:内部压力故障安全阈值
触发故障保护之前允许的最大内部压力。故障安全操作由FS_PRESS_ENABLE参数决定
- 单位:Pa
FS_TEMP_MAX:内部温度故障保护阈值
触发故障保护之前允许的最高内部温度。故障安全操作由FS_TEMP_ENABLE参数决定。
- 单位:degC
FS_TERRAIN_ENAB:地形故障安全启用
控制在自动模式下地形信息丢失时要采取的操作
| 值 | 意义 |
| 0 | 加锁 |
| 1 | 保持当前位置 |
| 2 | 浮出水面 |
FS_PILOT_INPUT:guided控制输入故障保护
控制在 FS_PILOT_TIMEOUT 参数指定的超时期限后未收到任何guided输入时要执行的操作
| 值 | 意义 |
| 0 | 未使能 |
| 1 | 仅警告 |
| 2 | 加锁 |
FS_PILOT_TIMEOUT:guided输入故障保护的超时时间
在触发故障安全操作之前,控制接收到的导频输入之间的最大间隔
- 单位:s
- 范围:0.1 3.0
XTRACK_ANG_LIM:横向修正角度限制
航点导航期间当前航迹与所需航向之间的最大允许角度(以度为单位)
- 范围:10 90
WP_YAW_BEHAVIOR:任务期间的偏航行为
确定自动驾驶仪在任务和 RTL 期间如何控制偏航
| 值 | 意义 |
| 0 | 保持当前航向 |
| 1 | 指向下一航点 |
| 2 | 除了返航期间指向下一航点 |
| 3 | Face along GPS course |
| 4 | 指向航线误差方向 |
PILOT_SPEED_UP:机器人最大垂直上升速度
机器人可能要求的最大垂直上升速度,单位为厘米/秒
- 单位:cm/s
- 范围:50 500
- 增量:10
PILOT_SPEED_DN:机器人最大垂直下降速度
机器人可能要求的最大垂直下降速度,单位为厘米/秒
- 单位:cm/s
- 范围:50 500
- 增量:10
PILOT_ACCEL_Z:机器人垂直加速度
机器人控制高度时使用的垂直加速度
- 单位:cm/s/s
- 范围:50 500
- 增量:10
THR_DZ:油门死区
PWM盲区(以微秒为单位)高于和低于中油门。用于 AltHold、Loiter、PosHold 航行模式
- 射程:0 300
- 单位:PWM
- 增量:1
LOG_BITMASK:日志位掩码
要启用的日志类型的 4 字节标志位
| 值 | 意义 |
| 830 | 默认 |
| 894 | 默认+遥控输入数据 |
| 958 | 默认+IMU数据 |
| 1854 | 默认+电机数据 |
| -6146 | 几乎全部数据-AC315 |
| 45054 | 几乎全部数据 |
| 131071 | 全部数据+高频率姿态 |
| 262142 | 全部数据+电机和电池数据 |
| 393214 | 全部数据+高频率IMU |
| 397310 | 全部数据+高频率IMU+PID数据 |
| 655358 | 全部数据+全频率IMU数据 |
| 0 | 未使能 |
ANGLE_MAX:最大角度
所有航行模式下的最大倾斜角
- 单位:cdeg
- 范围:1000 8000
FS_EKF_ACTION:EKF 故障安全操作
控制调用 EKF 故障保护时将执行的操作
| 值 | 意义 |
| 0 | 未使能 |
| 1 | 仅警告 |
| 2 | 加锁 |
FS_EKF_THRESH:EKF 故障安全方差阈值
允许设置最大可接受的罗盘和速度方差
- 值:0.6:Strict、0.8:默认、1.0:Relaxed
FS_CRASH_CHECK:启用碰撞检查
这将启用自动崩溃检查。启用后,如果检测到碰撞,电机将加锁。
| 值 | 意义 |
| 0 | 未使能 |
| 1 | 仅警告 |
| 2 | 加锁 |
JS_GAIN_DEFULT:启动时的默认增益
启动时的默认增益必须在 [JS_GAIN_MIN , JS_GAIN_MAX] 范围内
- 范围:0.1 1.0
JS_GAIN_MAX:最大操纵杆增益
最大操纵杆增益
- 范围:0.2 1.0
JS_GAIN_MIN:最小操纵杆增益
最小操纵杆增益
- 范围:0.1 0.8
JS_GAIN_STEPS:增益步长
当使用按钮调整增益时,控制最小和最大操纵杆增益之间的步长。设置为 1 可始终使用JS_GAIN_默认。
- 范围:1 10
JS_LIGHTS_STEPS:灯光亮度步长
最小亮度和最大亮度之间的亮度步长数
- 范围:1 10单位:PWM
JS_THR_GAIN:油门增益标量
油门通道增益的标量
- 范围:0.5 4.0
FRAME_CONFIG:机架配置
根据您的水下机器人/电机配置设置此参数
- 是否需要重启飞控:是
| 值 | 意义 |
| 0 | BlueROV1 |
| 1 | Vectored |
| 2 | Vectored_6DOF |
| 3 | Vectored_6DOF_90 |
| 4 | SimpleROV-3 |
| 5 | SimpleROV-4 |
| 6 | SimpleROV-5 |
| 7 | Custom |
RC_SPEED:电调更新速率
这是您的电调将接收更新的速率(以赫兹为单位)
- 单位:赫兹
- 范围:50 490
- 增量:1
ACRO_RP_P:Acro Roll 和 Pitch P 增益
在 ACRO 和 SPORT 模式下将导向滚转和俯仰转换为所需的旋转速率。值越高意味着旋转速度越快。
- 范围:1 10
ACRO_YAW_P:Acro Yaw P 增益
将导向偏航输入转换为所需的旋转速率。值越高意味着旋转速度越快。
- 范围:1 10
ACRO_BAL_ROLL:Acro 平衡辊
在 ACRO 模式下横滚角度恢复到水平的速率。值越高,机器人返回水平的速度越快。
- 范围:0 3
- 增量:0.1
ACRO_BAL_PITCH:跨平衡节距
在 Acro 模式下俯仰角恢复水平的速率。值越高,机器人返回水平的速度越快。
- 范围:0 3
- 增量:0.1
TERRAIN_FOLLOW:地形跟踪使用控制
这为 RTL 和 SURFACE 航行模式提供了地形跟踪。要使用此选项TERRAIN_ENABLE必须为 1,并且 GCS 必须支持向航行器发送地形数据。在 RTL 中,RTL_ALT将被视为高于地形的高度。在SURFACE 模式下,水下机器人将减速至LAND_SPEED高于地形 10 米(而不是高于本地 10 米)。
| 值 | 意义 |
| 0 | Do not use in RTL and SURFACE |
| 1 | Use in RTL and SURFACE |
ARMING_CHECK:解锁检查(位掩码)
在解锁电机之前进行检查。这是在允许解锁之前将执行的检查位掩码。默认值为“无检查”,允许随时解锁。您可以通过将每种检查类型的值相加来设置此参数,从而选择您喜欢的任何检查。例如,要仅在具有 GPS 锁定且没有 RC 故障保护时才允许解锁,请将 ARMING_CHECK 设置为 72。对于大多数用户,建议将此设置为 1 以启用所有检查。
| 值 | 意义 |
| 0 | None |
| 1 | All |
| 2 | Barometer |
| 4 | Compass |
| 8 | GPS Lock |
| 16 | INS(INertial Sensors - accels & gyros) |
| 32 | Parameters(unused) |
| 64 | RC Channels |
| 128 | Board voltage |
| 256 | Battery Level |
| 512 | Airspeed |
| 1024 | LoggingAvailable |
| 2048 | Hardware safety switch |
| 4096 | GPS configuration |
| 8192 | System |
- 位掩码:0:全部,1:气压计,2:指南针,3:GPS锁定,4:INS,5:参数,6:RC通道,7:板电压,8:电池电量,9:空速,10:可用记录,11:硬件安全开关,12:GPS配置,13:系统,14:任务,15:测距仪
ATC参数
ATC_SLEW_YAW:偏航目标压摆率
偏航目标的最大速率可以在 Loiter、RTL、自动航行模式下更新
- 单位:cdeg/s
- 范围:500 18000
- 增量:100
ATC_ACCEL_Y_MAX:偏航的最大加速度
偏航轴的最大加速度
- 单位:cdeg/s/s
- 范围:0 72000
| 值 | 意义 |
| 0 | 未使能 |
| 9000 | Very慢 |
| 18000 | 慢 |
| 36000 | 中 |
| 54000 | 快 |
- 增量:1000
ATC_RATE_FF_ENAB:速率前馈保护
| 值 | 意义 |
| 0 | 未使能 |
| 1 | Enable |
ATC_ACCEL_R_MAX:横滚的最大加速度
横滚轴的最大加速度
- 单位:cdeg/s/s
- 范围:0 180000
- 增量:1000
| 值 | 意义 |
| 0 | Disable |
| 30000 | Very慢 |
| 72000 | 慢 |
| 108000 | 中 |
| 162000 | 快 |
ATC_ACCEL_P_MAX:俯仰的最大加速度
俯仰轴的最大加速度
- 单位:cdeg/s/s
- 范围:0 180000
- 增量:1000
| 值 | 意义 |
| 0 | Disable |
| 30000 | Very慢 |
| 72000 | 慢 |
| 108000 | 中 |
| 162000 | 快 |
ATC_ANGLE_BOOST:角度补偿
当水下机器人倾斜时,会增加输出油门,以减少掉高
| 值 | 意义 |
| 0 | 未使能 |
| 1 | 使能 |
ATC_ANG_RLL_P:横滚轴角度控制器P增益
横滚轴角度控制器P增益。将所需侧倾角和实际角度之间的误差转换为所需的侧倾速率
- 范围:0.0 12.000
ATC_ANG_PIT_P:俯仰轴角度控制器 P 增益
俯仰轴角度控制器 P 增益。将所需俯仰角和实际角度之间的误差转换为所需的俯仰速率
- 范围:0.0 12.000
ATC_ANG_YAW_P:偏航轴角度控制器 P 增益
偏航轴角度控制器 P 增益。将所需偏航角与实际偏航角之间的误差转换为所需偏航速率
- 范围:0.0 6.000
ATC_ANG_LIM_TC:角度限制(保持高度) 时间常数
角度限制(保持高度) 时间常数
- 范围:0.5 10.0
ATC_RATE_R_MAX:横滚的最大角速度
横滚轴的最大角速度
- 单位:deg/s
- 范围:0 1080
- 增量:1
| 值 | 意义 |
| 0 | 未使能 |
| 360 | 慢 |
| 720 | 中 |
| 1080 | 快 |
ATC_RATE_P_MAX:俯仰角的最大角速度
俯仰轴上的最大角速度
- 单位:deg/s
- 范围:0 1080
- 增量:1
| 值 | 意义 |
| 0 | 未使能 |
| 360 | 慢 |
| 720 | 中 |
| 1080 | 快 |
ATC_RATE_Y_MAX:偏航的最大角速度
偏航轴上的最大角速度
- 单位:deg/s
- 范围:0 1080
- 增量:1
| 值 | 意义 |
| 0 | 未使能 |
| 360 | 慢 |
| 720 | 中 |
| 1080 | 快 |
ATC_INPUT_TC:姿态控制输入时间常数
姿态控制输入时间恒定。数字越小,响应越尖锐,数字越大,响应越柔和
- 单位:s
- 范围:0 1
- 增量:0.01
- 值:0.5:非常柔软,0.2:柔软,0.15:中等,0.1:脆,0.05:非常脆
ATC_RAT_RLL_P:横滚轴速率控制器 P 增益
横滚轴速率控制器P增益。将所需横滚速度与实际横滚速度之间的差值转换为电机速度输出
- 范围:0.0 0.30
- 增量: 0.005
ATC_RAT_RLL_I:横滚轴速率控制器I增益
横滚轴速率控制器I增益。校正所需横滚速度与实际横滚速度的长期差异
- 范围:0.0 0.5
- 增量:0.01
ATC_RAT_RLL_IMAX:横滚轴速率控制器I最大增益
横滚轴速率控制器 I 最大增益。限制 I 增益将输出的最大电机输出
- 范围:0 1
- 增量:0.01
- 单位: %
ATC_RAT_RLL_D:横滚轴速率控制器D增益
横滚轴速率控制器 D 增益。补偿所需横滚速度与实际横滚速度的短期变化
- 范围:0.0 0.02
- 增量: 0.001
ATC_RAT_RLL_FF:横滚轴速率控制器前馈
横滚轴速率控制器前馈
- 范围:0 0.5
- 增量: 0.001
ATC_RAT_RLL_FLTT:横滚轴速率控制器输入频率(Hz)
横滚轴速率控制器输入频率(Hz)
- 射程:1 100
- 增量:1
- 单位:赫兹
ATC_RAT_RLL_FLTE:横滚轴速率控制器输入频率(Hz)
横滚轴速率控制器输入频率(Hz)
- 范围:1 100
- 增量:1
- 单位:赫兹
ATC_RAT_RLL_FLTD:横滚轴速率控制器输入频率(Hz)
横滚轴速率控制器输入频率(Hz)
范围:1 100
增量:1
单位:赫兹
ATC_RAT_PIT_P:俯仰轴速率控制器 P 增益
俯仰轴速率控制器 P 增益。将所需变速与实际变速之间的差值转换为电机转速输出
- 范围:0.0 0.30
- 增量: 0.005
ATC_RAT_PIT_I:俯仰轴速率控制器I增益
俯仰轴速率控制器I增益。校正所需俯仰速率与实际俯仰速率的长期差异
- 范围:0.0 0.5
- 增量:0.01
ATC_RAT_PIT_IMAX:俯仰轴速率控制器 I 增益最大
俯仰轴速率控制器 I 增益最大。限制 I 增益将输出的最大电机输出
- 范围:0 1
- 增量:0.01
- 单位: %
ATC_RAT_PIT_D:俯仰轴速率控制器D增益
俯仰轴速率控制器 D 增益。补偿所需俯仰速率相对于实际俯仰速率的短期变化
- 范围:0.0 0.02
- 增量: 0.001
ATC_RAT_PIT_FF:俯仰轴速率控制器前馈
俯仰轴速率控制器前馈
- 范围:0 0.5
- 增量: 0.001
ATC_RAT_PIT_FLTT:俯仰轴速率控制器输入频率(Hz)
俯仰轴速率控制器输入频率(Hz)
- 范围:1 100
- 增量:1
- 单位:赫兹
ATC_RAT_PIT_FLTE:俯仰轴速率控制器输入频率(Hz)
俯仰轴速率控制器输入频率(Hz)
- 范围:1 100
- 增量:1
- 单位:赫兹
ATC_RAT_PIT_FLTD:俯仰轴速率控制器输入频率(Hz)
俯仰轴速率控制器输入频率(Hz)
- 范围:1 100
- 增量:1
- 单位:赫兹
ATC_RAT_YAW_P:偏航轴速率控制器 P 增益
偏航轴速率控制器 P 增益。将所需偏航速度与实际偏航速度之间的差值转换为电机转速输出
- 范围:0.0 0.50
- 增量: 0.005
ATC_RAT_YAW_I:偏航轴速率控制器I增益
偏航轴速率控制器 I 增益。校正所需偏航速率与实际偏航速率的长期差异
- 范围:0.0 0.05
- 增量:0.01
ATC_RAT_YAW_IMAX:偏航轴速率控制器 I 增益最大
偏航轴速率控制器 I 增益最大。限制 I 增益将输出的最大电机输出
- 范围:0 1
- 增量:0.01
- 单位: %
ATC_RAT_YAW_D:偏航轴速率控制器 D 增益
偏航轴速率控制器 D 增益。补偿所需偏航速率相对于实际偏航速率的短期变化
- 范围:0.000 0.02
- 增量: 0.001
ATC_RAT_YAW_FF:偏航轴速率控制器前馈
偏航轴速率控制器前馈
- 范围:0 0.5
- 增量: 0.001
ATC_RAT_YAW_FLTT:偏航轴速率控制器输入频率(Hz)
偏航轴速率控制器输入频率(Hz)
- 范围:1 100
- 增量:1
- 单位:赫兹
ATC_RAT_YAW_FLTE:偏航轴速率控制器输入频率(Hz)
偏航轴速率控制器输入频率(Hz)
- 范围:1 100
- 增量:1
- 单位:赫兹
ATC_RAT_YAW_FLTD:偏航轴速率控制器输入频率(Hz)
偏航轴速率控制器输入频率(Hz)
- 范围:1 100
- 增量:1
- 单位:赫兹
ATC_THR_MIX_MIN:最小油门混合
降落时使用的油门与姿态控制优先级(更高的值意味着我们优先考虑姿态控制而不是油门)
- 范围:0.1 0.25
ATC_THR_MIX_MAX:最大油门混合
主动航行期间使用的油门与姿态控制优先级(更高的值意味着我们优先考虑姿态控制而不是油门)
- 范围:0.5 0.9
ATC_THR_MIX_MAN:
手动航行期间使用的油门与姿态控制优先级(更高的值意味着我们优先考虑姿态控制而不是油门)
- 范围:0.5 0.9
ATC_RAT_RLL_FILT:横滚轴速率控制器输入频率(Hz)
横滚轴速率控制器输入频率(Hz)
- 范围:1 100
- 增量:1
- 单位:赫兹
ATC_RAT_PIT_FILT:俯仰轴速率控制器输入频率(Hz)
俯仰轴速率控制器输入频率(Hz)
- 范围:1 100
- 增量:1
- 单位:赫兹
ATC_RAT_YAW_FILT:偏航轴速率控制器输入频率(Hz)
偏航轴速率控制器输入频率(Hz)
- 范围:1 100
- 增量:1
- 单位:赫兹
BATT2参数
BATT2_MONITOR:电池监控
控制装置可监控电池的电压和电流
| 值 | 意义 |
| 0 | 未使能 |
| 3 | Analog Voltage Only |
| 4 | Analog Voltage and Current |
| 5 | Solo |
| 6 | Bebop |
| 7 | SMBus-Maxell |
| 8 | UAVCAN-BatteryInfo |
| 9 | BLHeli 电调 |
| 10 | SumOfFollowing |
| 11 | FuelFlow |
| 12 | FuelLevelPWM |
- 是否需要重启飞控:是
BATT2_VOLT_PIN:电池电压感应引脚
设置应用于电压监控的模拟输入引脚。
| 值 | 意义 |
| -1 | 禁用 |
| 2 | Pixhawk/Pixracer/Navio2/Pixhawk2_PM1 |
| 13 | Pixhawk2_PM2 |
| 14 | 立方体橙 |
| 13 | CubeOrange_PM2 |
| 100 | PX4-v1型 |
- 是否需要重启飞控:是
BATT2_CURR_PIN:电池电流检测引脚
设置应用于电流监控的模拟输入引脚。
| 值 | 意义 |
| -1 | 未使能 |
| 2 | Pixhawk/Pixracer/Navio2/Pixhawk2_PM1 |
| 13 | Pixhawk2_PM2 |
| 14 | CubeOrange |
| 13 | CubeOrange_PM2 |
| 100 | PX4-v1 |
- 是否需要重启飞控:是
BRD 参数
BRD_PWM_COUNT:辅助引脚配置
控制为PWM设置的FMU输出数量。所有未分配的引脚都可用于 GPIO
| 值 | 意义 |
| 0 | No PWMs |
| 1 | One PWMs |
| 2 | Two PWMs |
| 3 | Three PWMs |
| 4 | Four PWMs |
| 5 | Five PWMs |
| 6 | Six PWMs |
| 7 | Seven PWMs |
| 8 | Eight PWMs |
- 是否需要重启飞控: 是
BRD_SER1_RTSCTS:串口 1 流量控制
在 Pixhawk 上的串口 1(遥测 1)上启用流量控制。您必须将 RTS 和 CTS 引脚连接到您的电台。用于 3DR 无线电的标准 DF13 6 针连接器确实连接了这些针脚。如果设置为 2,则将通过在启动时检查输出缓冲区填充来自动检测流量控制。请注意,PX4v1 在此端口上没有硬件流量控制引脚,因此应将其禁用。
| 值 | 意义 |
| 0 | 未使能 |
| 1 | 使能 |
| 2 | Auto |
- 是否需要重启飞控:是
BRD_SER2_RTSCTS:串口 2 流量控制
在 Pixhawk 和 STATE 上的串口 2(遥测 2)上启用流量控制。您必须将 RTS 和 CTS 引脚连接到您的电台。用于 3DR 无线电的标准 DF13 6 针连接器确实连接了这些针脚。如果设置为 2,则将通过在启动时检查输出缓冲区填充来自动检测流量控制。
| 值 | 意义 |
| 0 | 未使能 |
| 1 | 使能 |
| 2 | Auto |
- 是否需要重启飞控:是
BRD_SAFETYENABLE:启用安全解锁开关
这控制了启动时安全开关的默认状态。当设置为 1 时,安全开关将在启动时以安全状态(闪烁)启动。当设置为零时,安全开关将在启动时以不安全状态(常亮)启动。请注意,如果安装了安全开关,用户仍然可以在启动后使用开关控制安全状态。安全状态也可以在软件中使用 MAVLink 消息进行控制。
| 值 | 意义 |
| 0 | 未使能 |
| 1 | 使能 |
- 是否需要重启飞控:是
LEAK 参数
LEAK1_PIN:检漏仪连接的引脚
检漏仪所连接的引脚
| 值 | 意义 |
| -1 | 未使能 |
| 50 | Pixhawk Aux1 |
| 51 | Pixhawk Aux2 |
| 52 | Pixhawk Aux3 |
| 53 | Pixhawk Aux4 |
| 54 | Pixhawk Aux5 |
| 55 | Pixhawk Aux6 |
| 13 | Pixhawk 3.3ADC1 |
| 14 | Pixhawk 3.3ADC2 |
| 15 | Pixhawk 6.6ADC |
- 是否需要重启飞控: 是
LEAK1_LOGIC:检漏仪干燥时的默认读数
检漏仪干燥时的默认读数
| 值 | 意义 |
| 0 | Low |
| 1 | High |
LEAK2_PIN:检漏仪连接的引脚
检漏仪所连接的引脚
| 值 | 意义 |
| -1 | 未使能 |
| 50 | Pixhawk Aux1 |
| 51 | Pixhawk Aux2 |
| 52 | Pixhawk Aux3 |
| 53 | Pixhawk Aux4 |
| 54 | Pixhawk Aux5 |
| 55 | Pixhawk Aux6 |
| 13 | Pixhawk 3.3ADC1 |
| 14 | Pixhawk 3.3ADC2 |
| 15 | Pixhawk 6.6ADC |
- 是否需要重启飞控: 是
LEAK2_LOGIC:检漏仪干燥时的默认读数
检漏仪干燥时的默认读数
| 值 | 意义 |
| 0 | Low |
| 1 | High |
LEAK3_PIN:检漏仪连接的引脚
检漏仪所连接的引脚
| 值 | 意义 |
| -1 | 未使能 |
| 50 | Pixhawk Aux1 |
| 51 | Pixhawk Aux2 |
| 52 | Pixhawk Aux3 |
| 53 | Pixhawk Aux4 |
| 54 | Pixhawk Aux5 |
| 55 | Pixhawk Aux6 |
| 13 | Pixhawk 3.3ADC1 |
| 14 | Pixhawk 3.3ADC2 |
| 15 | Pixhawk 6.6ADC |
- 是否需要重启飞控:是
LEAK3_LOGIC:检漏仪干燥时的默认读数
检漏仪干燥时的默认读数
| 值 | 意义 |
| 0 | Low |
| 1 | High |
MOT 参数
MOT_1_DIRECTION:电机正常或反转
用于在不更换电线的情况下改变电机旋转方向
| Value | Meaning |
| 1 | normal |
| -1 | reverse |
MOT_2_DIRECTION:电机正常或反转
用于在不更换电线的情况下改变电机旋转方向
| Value | Meaning |
| 1 | normal |
| -1 | reverse |
MOT_3_DIRECTION:电机正常或反转
用于在不更换电线的情况下改变电机旋转方向
| Value | Meaning |
| 1 | normal |
| -1 | reverse |
MOT_4_DIRECTION:电机正常或反转
用于在不更换电线的情况下改变电机旋转方向
| Value | Meaning |
| 1 | normal |
| -1 | reverse |
MOT_5_DIRECTION:电机正常或反转
用于在不更换电线的情况下改变电机旋转方向
| Value | Meaning |
| 1 | normal |
| -1 | reverse |
MOT_6_DIRECTION:电机正常或反转
用于在不更换电线的情况下改变电机旋转方向
| Value | Meaning |
| 1 | normal |
| -1 | reverse |
MOT_7_DIRECTION:电机正常或反转
用于在不更换电线的情况下改变电机旋转方向
| Value | Meaning |
| 1 | normal |
| -1 | reverse |
MOT_8_DIRECTION:电机正常或反转
用于在不更换电线的情况下改变电机旋转方向
| Value | Meaning |
| 1 | normal |
| -1 | reverse |
MOT_FV_CPLNG_K:正向/垂直到俯仰去耦因子
用于将俯仰与向前/垂直运动分离。0 禁用,1.2 正常
- 范围:0.0 1.5
- 增量:0.1
MOT_9_DIRECTION:电机正常或反转
用于在不更换电线的情况下改变电机旋转方向
| Value | Meaning |
| 1 | normal |
| -1 | reverse |
MOT_10_DIRECTION:电机正常或反转
用于在不更换电线的情况下改变电机旋转方向
| Value | Meaning |
| 1 | normal |
| -1 | reverse |
MOT_11_DIRECTION:电机正常或反转
用于在不更换电线的情况下改变电机旋转方向
| Value | Meaning |
| 1 | normal |
| -1 | reverse |
MOT_12_DIRECTION:电机正常或反转
用于在不更换电线的情况下改变电机旋转方向
| Value | Meaning |
| 1 | normal |
| -1 | reverse |
MOT_PWM_TYPE:输出PWM型
这可选择输出PWM类型,允许正常PWM连续输出、OneShot、有刷或DShot电机输出
| 值 | 意义 |
| 0 | Normal |
| 1 | OneShot |
| 2 | OneShot125 |
| 3 | Brushed |
| 4 | DShot150 |
| 5 | DShot300 |
| 6 | DShot600 |
| 7 | DShot1200 |
- 是否需要重启飞控: 是
MOT_PWM_MIN:PWM输出最小值
这将设置将输出到电机的最小 PWM 输出值(以微秒为单位),0 = 使用输入RC3_MIN
- 单位:PWM
- 范围:0 2000
PSC 参数
PSC_ACC_XY_FILT:XY加速度滤波器截止频率
较低的值会减慢导航控制器的响应速度并减少抽搐
- 单位:赫兹
- 范围:0.5 5
- 增量:0.1
PSC_POSZ_P:位置(垂直)控制器 P 增益
位置(垂直)控制器 P 增益。将所需高度与实际高度之间的差值转换为爬升或下降速率,并传递到油门速率控制器
- 范围:1.000 3.000
PSC_VELZ_P:速度(垂直)控制器 P 增益
速度(垂直)控制器 P 增益。将所需垂直速度与实际速度之间的差值转换为传递到油门加速控制器的所需加速度
- 范围:1.000 8.000
PSC_ACCZ_P:加速度(垂直)控制器 P 增益
加速度(垂直)控制器P增益。将所需的垂直加速度与实际加速度之间的差值转换为电机输出
- 范围:0.500 1.500
- 增量:0.05
PSC_ACCZ_I:加速度(垂直)控制器I增益
加速度(垂直)控制器I增益。校正所需垂直加速度和实际加速度的长期差异
- 范围:0.000 3.000
PSC_ACCZ_IMAX:加速度(垂直)控制器 I 增益最大
加速度(垂直)控制器 I 增益最大。约束 I 项将生成的最大 pwm
- 范围:0 1000
- 单位:d%
PSC_ACCZ_D:加速度(垂直)控制器 D 增益
加速度(垂直)控制器 D 增益。补偿所需垂直加速度与实际加速度的短期变化
- 范围:0.000 0.400
PSC_ACCZ_FILT:加速度(垂直)控制器过滤器
滤波器应用于加速度以降低噪音。较低的值可降低噪声,但会增加延迟。
- 范围:1.000 100.000
- 单位:赫兹
PSC_POSXY_P:位置(水平)控制器 P 增益
位置控制器 P 增益。将距离(在纬度方向上)转换为所需的速度,然后将其传递给徘徊纬度率控制器
- 范围: 0.500 2.000
PSC_VELXY_P:速度(水平)P 增益
速度(水平)P 增益。将所需速度之间的差值转换为目标加速度
- 范围:0.1 6.0
- 增量:0.1
PSC_VELXY_I:加速度(垂直)控制器I增益
速度(水平)我获得。校正所需速度与目标加速度的长期差异
- 范围:0.02 1.00
- 增量:0.01
PSC_VELXY_D:速度(水平)D 增益
速度(水平)D 增益。纠正速度的短期变化
- 范围:0.00 1.00
- 增量: 0.001
PSC_VELXY_IMAX:速度(水平)积分器最大值
速度(水平)积分器最大值。约束 I 增益将输出的目标加速度
- 范围:0 4500
- 增量:10
- 单位:cm/s/s
PSC_VELXY_FILT:速度(水平)输入滤波器
速度(水平)输入滤波器。此滤波器(以 hz 为单位)应用于 P 和 I 项的输入
- 范围:0 100
- 单位:赫兹
PSC_VELXY_D_FILT:速度(水平)输入滤波器
速度(水平)输入滤波器。此滤波器(以 hz 为单位)应用于 P 和 I 项的输入
- 范围:0 100
- 单位:赫兹
PSC_ANGLE_MAX:最大位置控制角度
可以要求的最大倾斜角度自动驾驶仪。设置为零以使用ANGLE_MAX参数值
- 单位:度
- 范围:0 45
- 增量:1
RC 参数
RC_OVERRIDE_TIME:RC 覆盖超时
超时后将不再使用 RC 覆盖,RC 输入将恢复,0 将禁用 RC 覆盖,-1 将永远不会超时,并继续使用覆盖,直到它们被禁用
- 范围:0.0 120.0
- 单位:s
RC_OPTIONS:RC 选项
RC 输入选项
- 位掩码:0:忽略 RC 接收器,1:忽略 MAVLink 覆盖,2:忽略接收器故障保护
RCn 参数
RCn_MIN:RC 最小 PWM
RC 最小 PWM 脉冲宽度,以微秒为单位。通常 1000 是下限,1500 是中性,2000 是上限。
- 单位:PWM
- 范围:800 2200
- 增量:1
RCn_TRIM:RC微调PWM
RC 微调(中性线)PWM 脉冲宽度,以微秒为单位。通常 1000 是下限,1500 是中性,2000 是上限。
- 单位:PWM
- 范围:800 2200
- 增量:1
RCn_MAX:RC 最大 PWM
RC 最大 PWM 脉冲宽度(以微秒为单位)。通常 1000 是下限,1500 是中性,2000 是上限。
- 单位:PWM
- 范围:800 2200
- 增量:1
RCn_REVERSED:RC反转
反向通道输入。设置为 0 可正常操作。设置为 1 可反转此输入通道。
| 值 | 意义 |
| 0 | Normal |
| 1 | Reversed |
RCn_DZ:RC盲区
PWM盲区(以微秒为单位)围绕修剪或底部
- 单位:PWM
- 范围:0 200
RCn_OPTION:RC输入选项
分配给此 RC 通道的功能
| 值 | 意义 |
| 0 | Do Nothing |
| 4 | ModeRTL |
| 9 | Camera Trigger |
| 16 | ModeAuto |
| 24 | Auto Mission Reset |
| 28 | Relay On/Off |
| 29 | Landing Gear |
| 34 | Relay2 On/Off |
| 30 | Lost Plane Sound |
| 31 | Motor Emergency Stop |
| 35 | Relay3 On/Off |
| 36 | Relay4 On/Off |
| 41 | Arm加锁 |
| 43 | InvertedFlight |
| 46 | RC Override Enable |
| 51 | ModeManual |
| 55 | ModeGuided |
| 58 | Clear Waypoints |
| 62 | Compass Learn |
| 64 | Reverse Throttle |
| 65 | GPS Disable |
| 66 | Relay5 |
| 67 | Relay6 |
| 72 | ModeCircle |
| 100 | KillIMU1 |
| 101 | KillIMU2 |
RELAY Parameters
RELAY_PIN:第一个继电器引脚
用于第一个继电器控制的数字引脚号。这是用于相机控制的引脚。
| 值 | 意义 |
| -1 | 未使能 |
| 49 | BB Blue GP0 pin 4 |
| 50 | AUXOUT1 |
| 51 | AUXOUT2 |
| 52 | AUXOUT3 |
| 53 | AUXOUT4 |
| 54 | AUXOUT5 |
| 55 | AUXOUT6 |
| 57 | BB Blue GP0 pin 3 |
| 113 | BB Blue GP0 pin 6 |
| 116 | BB Blue GP0 pin 5 |
RNGFND1 Parameters
RNGFND1_TYPE:测距仪类型
连接的测距仪设备类型
| 值 | 意义 |
| 0 | None |
| 1 | Analog |
| 2 | MaxbotixI2C |
| 3 | LidarLiteV2-I2C |
| 5 | PWM |
| 6 | BBB-PRU |
| 7 | LightWareI2C |
| 8 | LightWareSerial |
| 9 | Bebop |
| 10 | MAVLink |
| 11 | uLanding |
| 12 | LeddarOne |
| 13 | MaxbotixSerial |
| 14 | TeraRangerI2C |
| 15 | LidarLiteV3-I2C |
| 16 | VL53L0X |
| 17 | NMEA |
| 18 | WASP-LRF |
| 19 | BenewakeTF02 |
| 20 | BenewakeTFmini |
| 21 | LidarLightV3HP |
| 22 | PWM |
| 23 | BlueRoboticsPing |
| 24 | UAVCAN |
| 25 | BenewakeTFMiniPlus |
RNGFND1_PIN:测距仪引脚
测距仪连接的模拟引脚。在 PX11 上设置为 4 用于模拟“空速”端口。在 Pixhawk 上设置为 15 的模拟“空速”端口。
| 值 | 意义 |
| -1 | Not Used |
| 11 | PX4-airspeed port |
| 15 | Pixhawk-airspeed port |
RNGFND1_SCALING:测距仪缩放
测距仪读数和距离之间的比例因子。对于线性函数和反相函数,这是以米/伏特为单位。对于双曲函数,单位是米伏特。
- 单位:m/V
- 增量: 0.001
RNGFND1_OFFSET:测距仪偏移
模拟测距仪的零距离偏移量(以伏特为单位)。PWM 和 I2C 激光雷达的偏移量(以厘米为单位)增加
- 单位:V
- 增量: 0.001
RNGFND1_FUNCTION:测距仪功能
控制用于计算距离的函数。对于线性函数,距离是(电压偏移)缩放。对于反相函数,距离是(偏移电压)缩放。对于双曲函数,距离是缩放/(电压偏移)。这些函数以米为单位返回距离。
| 值 | 意义 |
| 0 | Linear |
| 1 | Inverted |
| 2 | Hyperbolic |
RNGFND1_MIN_CM:测距仪最小距离
测距仪可以可靠读取的最小距离(以厘米为单位)
- 单位:cm
- 增量:1
RNGFND1_MAX_CM:测距仪最大距离
测距仪可以可靠读取的最大距离(以厘米为单位)
- 单位:cm
- 增量:1
RNGFND1_STOP_PIN:测距仪停止引脚
数字引脚,用于启用/禁用 PWM 测距仪的测距仪测量。值 -1 表示没有引脚。如果设置了此值,则引脚设置为 1 以启用测距仪,设置为 0 以禁用测距仪。这用于在超出范围时启用省电。
| 值 | 意义 |
| -1 | Not Used |
| 50 | Pixhawk AUXOUT1 |
| 51 | Pixhawk AUXOUT2 |
| 52 | Pixhawk AUXOUT3 |
| 53 | Pixhawk AUXOUT4 |
| 54 | Pixhawk AUXOUT5 |
| 55 | Pixhawk AUXOUT6 |
| 111 | PX4 FMU Relay1 |
| 112 | PX4 FMU Relay2 |
| 113 | PX4IO Relay1 |
| 114 | PX4IO Relay2 |
| 115 | PX4IO ACC1 |
| 116 | PX4IO ACC2 |
RNGFND1_GNDCLEAR:测距仪到地面的距离(厘米)
该参数设置当水下机器人在地面上时测距仪应返回的预期距离测量值(以厘米为单位)。
- 单位:cm
- 范围:5 127
- 增量:1
RNGFND1_ADDR:传感器的总线地址
这将设置传感器的总线地址(如果适用)。用于 I2C 和 UAVCAN 传感器,允许在不同地址上安装多个传感器。值为 0 将禁用传感器。
- 范围:0 127
- 增量:1
RNGFND1_POS_X:X 位置偏移
第一个测距仪在车身机架中的 X 位置。正 X 位于原点的前方。如果提供,请使用零距离基准点。
- 单位:米
RNGFND1_POS_Y:Y 位置偏移
第一个测距仪在车身机架中的 Y 位置。正 Y 位于原点的右侧。如果提供,请使用零距离基准点。
- 单位:米
RNGFND1_POS_Z:Z位置偏移
第一个测距仪在车身机架中的Z位置。正 Z 从原点向下。如果提供,请使用零距离基准点。
- 单位:米
RNGFND1_ORIENT:测距仪方向
测距仪的方向
| 值 | 意义 |
| 0 | Forward |
| 1 | Forward-Right |
| 2 | Right |
| 3 | Back-Right |
| 4 | Back |
| 5 | Back-Left |
| 6 | Left |
| 7 | Forward-Left |
| 24 | Up |
| 25 | Down |
RNGFND1 Parameters
RNGFND1_WSP_MAVG:移动平均线范围
设置用于计算当前范围结果的历史范围结果数。当 MAVG 大于 1 时,当前范围结果将是当前测量值与 N-1 先前结果的平均值
- 范围:0 255
RNGFND1_WSP_MEDF:移动中值滤波器
设置实时中值筛选器的窗口大小。当 MEDF 大于 0 时,中值滤波器处于活动状态
- 范围:0 255
RNGFND1_WSP_FRQ:频率
设置测距操作的重复频率(以赫兹为单位)。输入所需频率后,系统将根据内部定时器的分辨率计算出它可以处理的最近频率。
- 范围:0 10000
RNGFND1_WSP_AVG:多脉冲平均值
设置在多脉冲平均模式下使用的脉冲数。在这种模式下,将采取一系列快速射击距离,然后取平均值以提高测量的准确性
- 范围:0 255
RNGFND1_WSP_THR:灵敏度阈值
设置系统敏感度。THR 值越大表示灵敏度越高。系统可能会根据出厂设置限制 THR 的最大值,以防止误报率过高。设置为 -1 可自动调整阈值
- 范围:-1 255
RNGFND1_WSP_BAUD:波特率
所需波特率
| 值 | 意义 |
| 0 | Low Speed |
| 1 | High Speed |
SCHED Parameters
SERIAL 参数
SERIAL0_BAUD:串口0波特率
USB 控制台上使用的波特率。大多数基于 stm32 的主板可以支持高达 1500 的速率。如果您设置了无法支持的速率,然后无法连接到您的主板,则应从其他水下机器人类型加载固件。这会将所有参数重置为默认值。
| 值 | 意义 |
| 1 | 1200 |
| 2 | 2400 |
| 4 | 4800 |
| 9 | 9600 |
| 19 | 19200 |
| 38 | 38400 |
| 57 | 57600 |
| 111 | 111100 |
| 115 | 115200 |
| 256 | 256000 |
| 460 | 460800 |
| 500 | 500000 |
| 921 | 921600 |
| 1500 | 1500000 |
SERIAL0_PROTOCOL:控制台协议选择
控制要在控制台上使用的协议。
| 值 | 意义 |
| 1 | MAVlink1 |
| 2 | MAVLink2 |
- 是否需要重启飞控:是
SERIAL1_PROTOCOL:Telem1 协议选择
控制要在 Telem1 端口上使用的协议。请注意,Frsky 选项需要外部转换器硬件。有关详细信息,请参阅 wiki。
| 值 | 意义 |
| -1 | None |
| 1 | MAVLink1 |
| 2 | MAVLink2 |
| 3 | Frsky D |
| 4 | Frsky SPort |
| 5 | GPS |
| 7 | Alexmos Gimbal Serial |
| 8 | SToRM32 Gimbal Serial |
| 9 | Rangefinder |
| 10 | FrSky SPort Passthrough (OpenTX) |
| 11 | Lidar360 |
| 13 | Beacon |
| 14 | Volz servo out |
| 15 | SBus servo out |
| 16 | 电调 Telemetry |
| 17 | Devo Telemetry |
| 18 | OpticalFlow |
| 19 | RobotisServo |
| 20 | NMEA Output |
| 21 | WindVane |
| 22 | SLCAN |
| 23 | RCIN |
- 是否需要重启飞控: 是
SERIAL1_BAUD:Telem1 波特率
Telem1 端口上使用的波特率。大多数基于 stm32 的主板可以支持高达 1500 的速率。如果您设置了无法支持的速率,然后无法连接到您的主板,则应从其他水下机器人类型加载固件。这会将所有参数重置为默认值。
| 值 | 意义 |
| 1 | 1200 |
| 2 | 2400 |
| 4 | 4800 |
| 9 | 9600 |
| 19 | 19200 |
| 38 | 38400 |
| 57 | 57600 |
| 111 | 111100 |
| 115 | 115200 |
| 256 | 256000 |
| 460 | 460800 |
| 500 | 500000 |
| 921 | 921600 |
| 1500 | 1500000 |
SERIAL_PASS1:串口直通第一个端口
这将设置两个串口端口之间的直通端。设置两端后,在任一端口上接收的所有数据都将传递到另一个端口
| 值 | 意义 |
| -1 | 未使能 |
| 0 | Serial0 |
| 1 | Serial1 |
| 2 | Serial2 |
| 3 | Serial3 |
| 4 | Serial4 |
| 5 | Serial5 |
| 6 | Serial6 |
SERIAL_PASS2:串口直通第二个端口
这将设置两个串口端口之间的直通端。设置两端后,在任一端口上接收的所有数据都将传递到另一个端口
| 值 | 意义 |
| -1 | 未使能 |
| 0 | Serial0 |
| 1 | Serial1 |
| 2 | Serial2 |
| 3 | Serial3 |
| 4 | Serial4 |
| 5 | Serial5 |
| 6 | Serial6 |
SERIAL_PASSTIMO:串口直通超时
这将设置串口直通的超时(以秒为单位)。当通过设置 SERIAL_PASS1 和 SERIAL_PASS2 参数启用直通时,它将保持有效,直到 SERIAL_PASSTIMO 秒内没有来自第一个端口的数据。这允许端口在不再需要时恢复其正常使用(例如与 GCS 的 MAVLink 连接)。值为 0 表示无超时。
- 范围:0 120
- 单位:s
SRn 参数
SRn_RAW_SENS:原始传感器流速率
RAW_IMU、SCALED_IMU2、SCALED_PRESSURE和SENSOR_OFFSETS到地面站的流速率
- 单位:赫兹
- 范围:0 10
- 增量:1
SRn_EXT_STAT:将状态流速率扩展到地面站
SYS_STATUS、MEMINFO、MISSION_CURRENT、GPS_RAW_INT、NAV_CONTROLLER_OUTPUT、LIMITS_STATUS到地面站的流速率
- 单位:赫兹
- 范围:0 10
- 增量:1
SRn_RC_CHAN:到地面站的RC信道流速率
SERVO_OUTPUT_RAW流速率和RC_CHANNELS_RAW到地面站
- 单位:赫兹
- 范围:0 10
- 增量:1
SRn_POSITION:将流速率定位到地面站
GLOBAL_POSITION_INT到地面站的流速率
- 单位:赫兹
- 范围:0 10
- 增量:1
SRn_EXTRA1:到地面站的额外数据类型 1 流速率
ATTITUDE 和 SIMSTATE(仅限 SITL)到地面站的流速率
- 单位:赫兹
- 范围:0 10
- 增量:1
SRn_EXTRA2:到地面站的额外数据类型 2 流速率
VFR_HUD到地面站的流速率
- 单位:赫兹
- 范围:0 10
- 增量:1
SRn_EXTRA3:到地面站的额外数据类型 3 流速率
AHRS、HWSTATUS 和 SYSTEM_TIME 到地面站的流速率
- 单位:赫兹
- 范围:0 10
- 增量:1
SRn_PARAMS:到地面站的参数流速率
PARAM_VALUE到地面站的流速率
- 单位:赫兹
- 范围:0 10
- 增量:1
相关文章:

水下机器人ArduSub 固件常用参数
目前最新版的ArduSub 固件是4.1.2,本文的参数是基于这个版本的固件 SURFACE_DEPTH:水表深度读数 当水下机器人在水面时,水压传感器将读取的深度数据(以厘米为单位),这个相当于抵消零偏 单位:…...
AI智能体 | 扣子Coze 工作流中如何嵌入代码,看这一篇就够了
Coze的工作流中除了能嵌入大模型,插件,图像流,其他工作流外,还能嵌入代码。嵌入代码的好处是对一些复杂的返回结果进行二次处理。 Coze的代码支持js和python两种语言。这次用python来做演示介绍 在节点中选择代码 弹出对话框如下…...
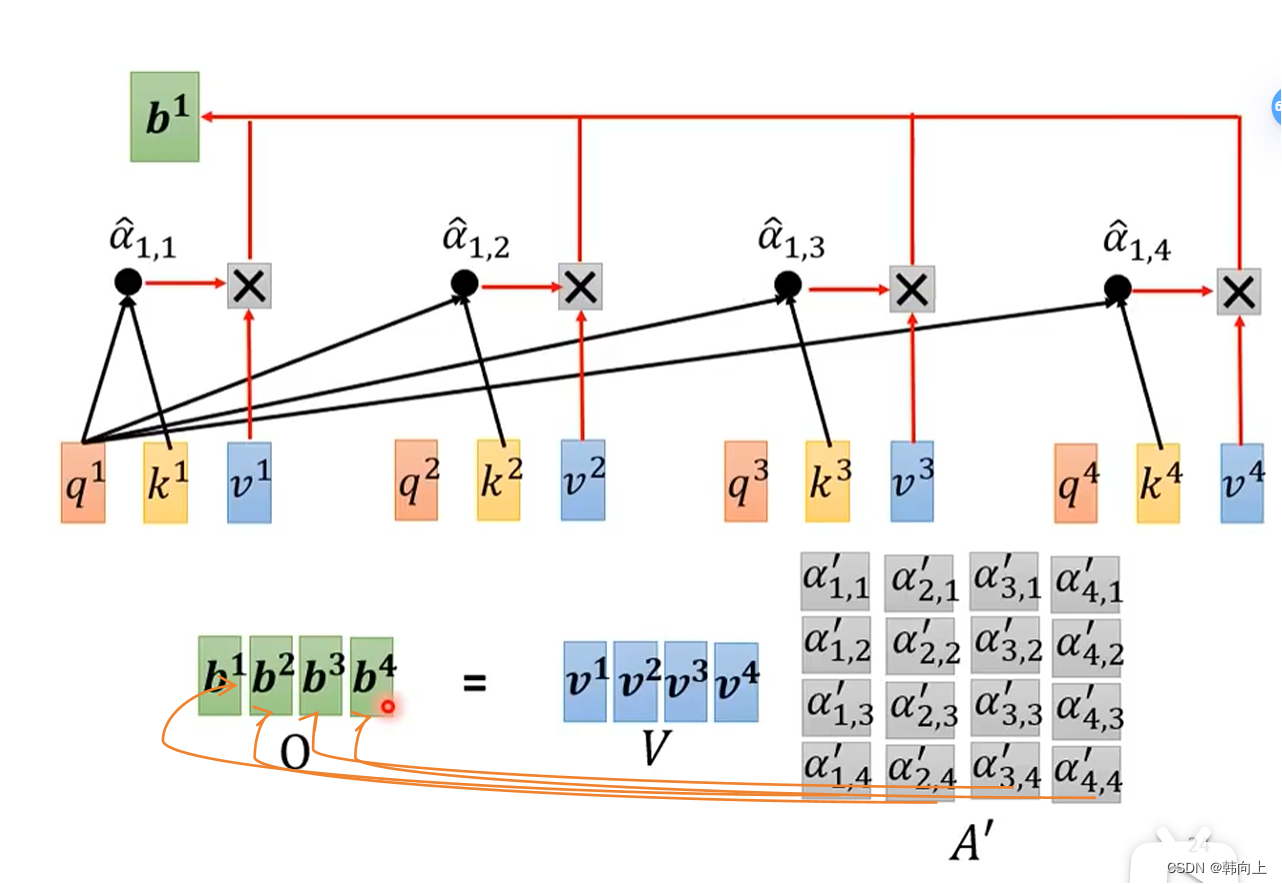
Transformer2--Multi-head self-attention
一、背景 为什么是multi-head self attention? 并行的处理多种注意力模式: 每个注意力头使用不同的线性变换,这意味着它们可以从输入序列的不同子空间中学习不同的特征关联。这样一来,模型可以通过多个注意力头同时关注输入序列的不同方面&…...
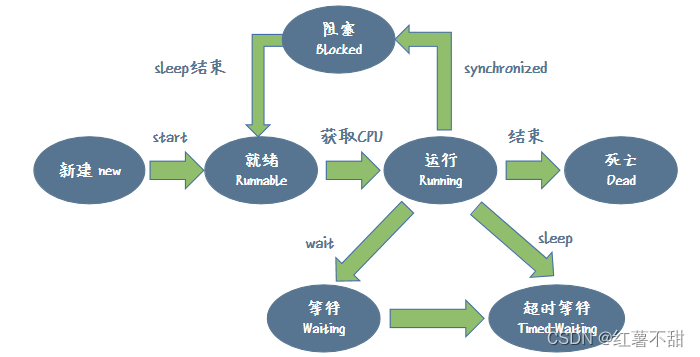
11. Java线程的状态详解
1. 前言 本节内容主要是对多线程的 6 种状态进行详细讲解,具体内容点如下: 抛开语言,谈操作系统的线程的生命周期及线程 5 种状态,这是我们学习 Java 多线程 6 种状态的基础;掌握 Java 的线程生命周期及 6 种线程状态…...

ubuntu永久换镜像源详细方法
1.查看ubuntu的版本,不同的版本对应的不同的镜像源(下面会讲到,先按步骤操作即可) cat /etc/issue 2.先备份一个,防止更改错误 cp /etc/apt/sources.list /etc/apt/sources.list.backup 3.备份好之后删除原有的sour…...
(相关命令))
docker部署(第一期)(相关命令)
腾讯云-----------镜像centOS 7.9 64位置---------------分配独立公网IP(远程连接)----------带宽选择最大-------------新建安全组-------------设置服务器密码---------WindTerm远程连接服务器 WindTerm下载:https://github.com/kingToolb…...

华为云L实例云服务器部署前后端分离项目全过程记录
1、配置云服务器 https://blog.csdn.net/modaoshi51991/article/details/139547630 2、上传前端项目并配置nginx 首先在前端项目运行以下代码将项目打包 我遇到node.js和openssl两个版本不兼容问题,更新版本依次解决即可 vue-cli-service build看一下package.json…...

uniapp - 微信小程序 - 自定义底部tabbar
废话不多说,直接行源码 这里需要的底部tabbar的图片在这里 我的资源里面呢 图片是这样的 先看成品吧 首先 - BaseApp\components\Tabbar.vue <script setup>import {ref,nextTick,watch} from "vue"// 核心 - 隐藏uniapp自带的底部tabbaruni.hi…...
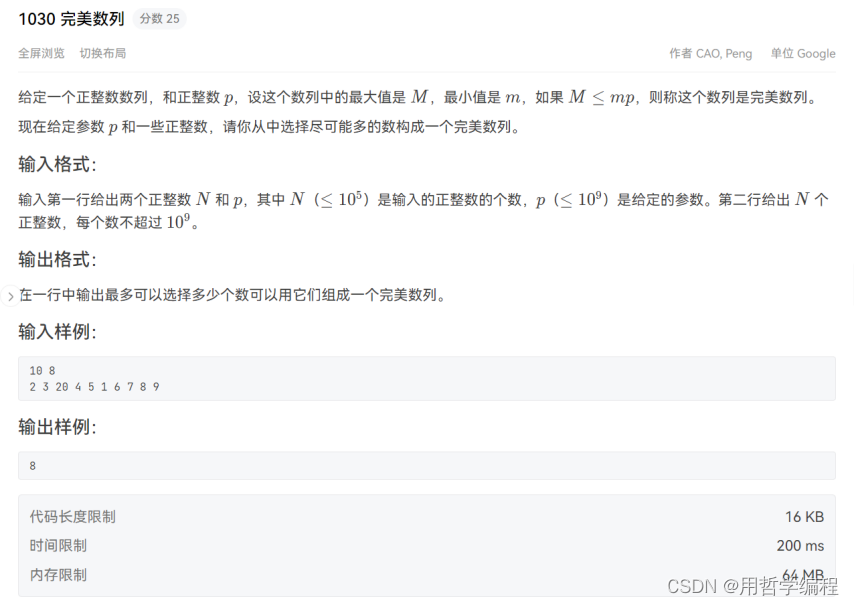
每日一题——Python实现PAT乙级1030 完美数列(举一反三+思想解读+逐步优化)五千字好文
一个认为一切根源都是“自己不够强”的INTJ 个人主页:用哲学编程-CSDN博客专栏:每日一题——举一反三Python编程学习Python内置函数 Python-3.12.0文档解读 目录 初次尝试 再次尝试 代码结构 时间复杂度分析 空间复杂度分析 总结 我要更强 时…...

【C/C++】this指针的概念和作用
目录 一、this指针的概念 二、this指针的作用 2.1 访问当前对象的成员 2.2 返回对象本身 2.3 区分对象 2.4 在构造函数和析构函数中 2.5 在类的内部调用其他成员函数 2.6 作为参数传递 三、this指针使用 3.1 this指针的使用 3.2 C++ 中this指针使用 一、this…...

Spring Bean 的生命周期
在 Spring 框架中,Bean 的生命周期由 Spring 容器管理,从创建到销毁,Spring 提供了多种方式来定制 Bean 的初始化和销毁过程。本文将详细介绍 Spring Bean 的生命周期,包括 Bean 的初始化和销毁、自定义初始化方法和销毁方法。 一…...

锐起RDV5高性能云桌面
锐起是上海锐起信息技术有限公司旗下品牌。该公司创立于 2001 年,是桌面虚拟化产品和解决方案提供商,专注于桌面管理系统和私有云存储系统的系列软件产品研发,致力于简化 IT 管理、增强系统安全,提供简单、易用、稳定、安全的产品…...

pandas减少dataframe占用内存的若干方法
一、只获取文件需要的列,避免加载整个文件 举例:只获取A.B两列数据 df pd.read_csv(123.csv, usecols[A, B]) 二、使用更准确的数据类型,减少内存空间占用 import pandas as pd import numpy as np # 假设你的CSV文件有三列࿰…...
)
Ubuntu20.04 64位 安装docker(有问题可评论沟通交流)
1、查看系统版本 cat /proc/version 2、卸载可能存在或未安装成功的docker(新系统无需操作) apt-get remove docker docker-engine docker-ce docker.io 3、更新apt-get apt-get update 4、安装软件包允许apt-get通过 HTTPS 使用存储库 apt-get install …...

【C++PCL】点云处理Kd树和八叉树区别
作者:迅卓科技 简介:本人从事过多项点云项目,并且负责的项目均已得到好评! 公众号:迅卓科技,一个可以让您可以学习点云的好地方 重点:每个模块都有参数如何调试的讲解,即调试某个参数对结果的影响是什么,大家有问题可以评论哈,如果文章有错误的地方,欢迎来指出错误的…...

makefile学习过程
makefile 完美教程 - WittXie - 博客园 (cnblogs.com) Makefile教程(绝对经典,所有问题看这一篇足够了)-CSDN博客 Makefile入门(超详细一文读懂)-CSDN博客 最实用的Makefile教程 真的很简单(搞不明白网上的教程写那么复杂干嘛&…...
Kompas AI数据分析与预测功能对比
一、引言 在现代商业环境中,数据分析与预测是企业制定战略决策的关键工具。通过对大量数据的分析,企业能够识别趋势、预测未来变化,并做出更为明智的决策。本文将对比Kompas AI与其他主要AI产品在数据分析与预测方面的能力,展示K…...

Appium+python自动化(二十五)- 那些让人抓耳挠腮、揪头发和掉头发的事 - 获取控件ID(超详解)
简介 在前边的第二十二篇文章里,已经分享了通过获取控件的坐标点来获取点击事件的所需要的点击位置,那么还有没有其他方法来获取控件点击事件所需要的点击位置呢?答案是:Yes!因为在不同的大小屏幕的手机上获取控件的坐…...

【博士每天一篇文献-算法】Fearnet Brain-inspired model for incremental learning
阅读时间:2023-12-16 1 介绍 年份:2017 作者:Ronald Kemker,美国太空部队;Christopher Kanan,罗切斯特大学 期刊: arXiv preprint 引用量:520 Kemker R, Kanan C. Fearnet: Brain-…...
Appium+python自动化(二十六)- 烟花一瞬,昙花一现 -Toast提示(超详解)
简介 今天宏哥在这里首先给小伙伴们和童鞋们分享一个有关昙花的小典故:话说昙花原是一位花神,她每天都开花,四季都灿烂。她还爱上了每天给她浇水除草的年轻人。后来,此事给玉帝得知。于是,玉帝大发雷霆,要…...

使用docker在3台服务器上搭建基于redis 6.x的一主两从三台均是哨兵模式
一、环境及版本说明 如果服务器已经安装了docker,则忽略此步骤,如果没有安装,则可以按照一下方式安装: 1. 在线安装(有互联网环境): 请看我这篇文章 传送阵>> 点我查看 2. 离线安装(内网环境):请看我这篇文章 传送阵>> 点我查看 说明:假设每台服务器已…...
)
Spring Boot 实现流式响应(兼容 2.7.x)
在实际开发中,我们可能会遇到一些流式数据处理的场景,比如接收来自上游接口的 Server-Sent Events(SSE) 或 流式 JSON 内容,并将其原样中转给前端页面或客户端。这种情况下,传统的 RestTemplate 缓存机制会…...
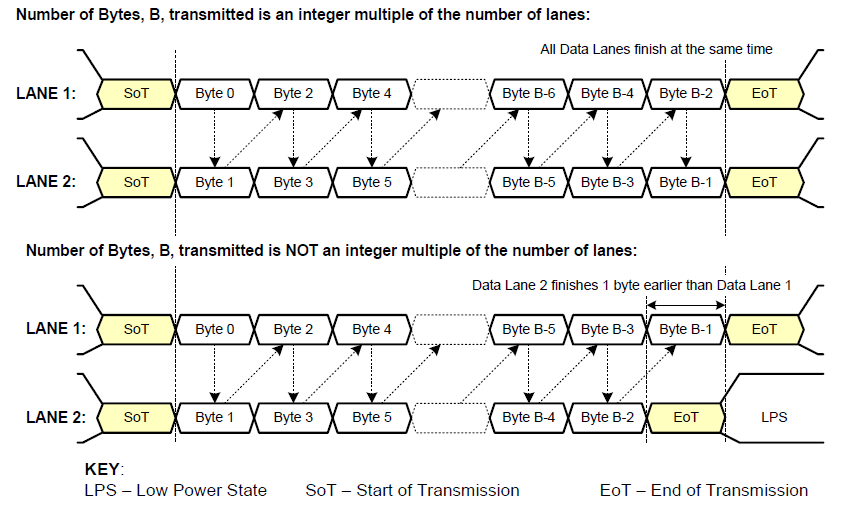
《从零掌握MIPI CSI-2: 协议精解与FPGA摄像头开发实战》-- CSI-2 协议详细解析 (一)
CSI-2 协议详细解析 (一) 1. CSI-2层定义(CSI-2 Layer Definitions) 分层结构 :CSI-2协议分为6层: 物理层(PHY Layer) : 定义电气特性、时钟机制和传输介质(导线&#…...
从深圳崛起的“机器之眼”:赴港乐动机器人的万亿赛道赶考路
进入2025年以来,尽管围绕人形机器人、具身智能等机器人赛道的质疑声不断,但全球市场热度依然高涨,入局者持续增加。 以国内市场为例,天眼查专业版数据显示,截至5月底,我国现存在业、存续状态的机器人相关企…...
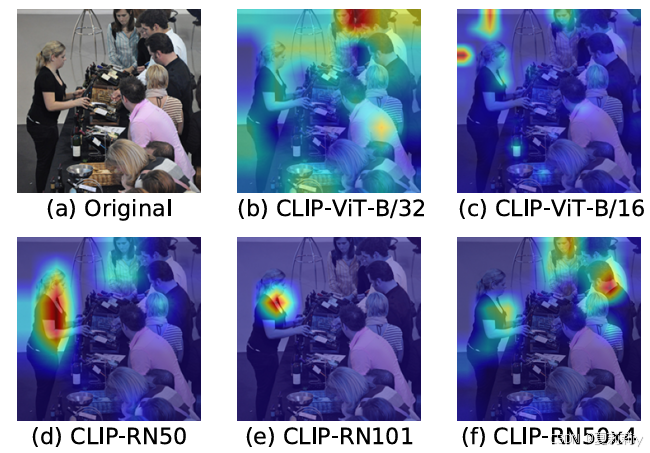
[ICLR 2022]How Much Can CLIP Benefit Vision-and-Language Tasks?
论文网址:pdf 英文是纯手打的!论文原文的summarizing and paraphrasing。可能会出现难以避免的拼写错误和语法错误,若有发现欢迎评论指正!文章偏向于笔记,谨慎食用 目录 1. 心得 2. 论文逐段精读 2.1. Abstract 2…...

ETLCloud可能遇到的问题有哪些?常见坑位解析
数据集成平台ETLCloud,主要用于支持数据的抽取(Extract)、转换(Transform)和加载(Load)过程。提供了一个简洁直观的界面,以便用户可以在不同的数据源之间轻松地进行数据迁移和转换。…...
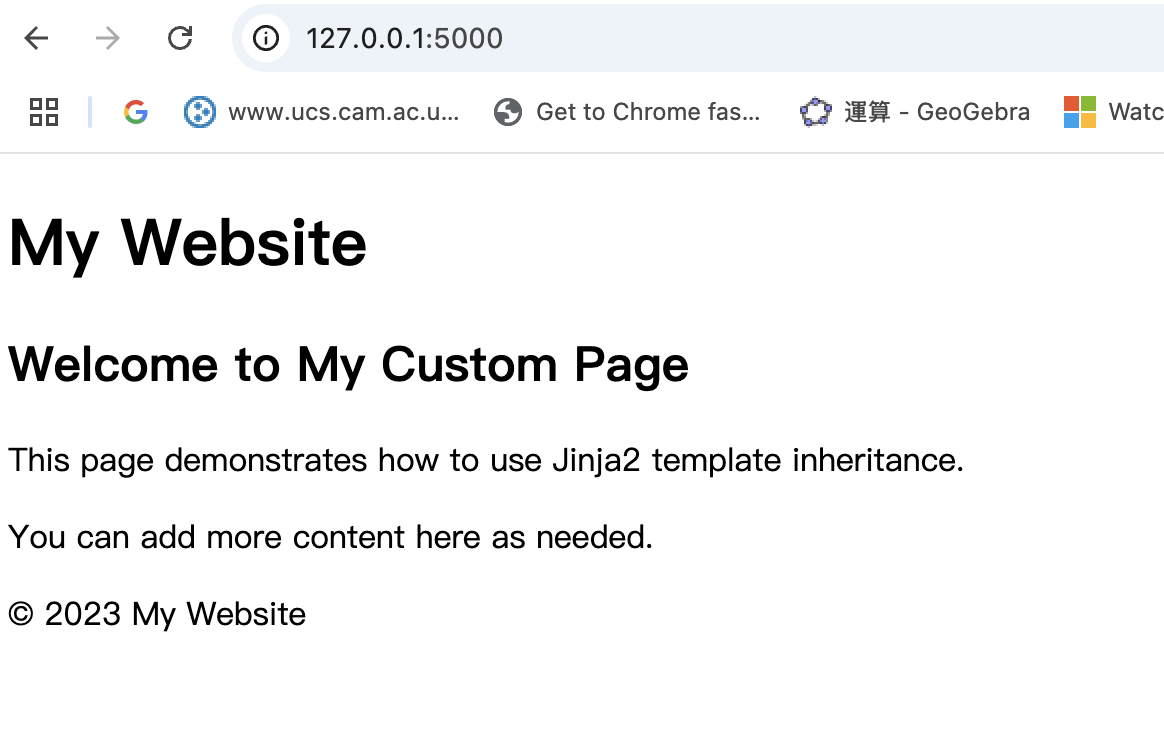
什么是Ansible Jinja2
理解 Ansible Jinja2 模板 Ansible 是一款功能强大的开源自动化工具,可让您无缝地管理和配置系统。Ansible 的一大亮点是它使用 Jinja2 模板,允许您根据变量数据动态生成文件、配置设置和脚本。本文将向您介绍 Ansible 中的 Jinja2 模板,并通…...

Java线上CPU飙高问题排查全指南
一、引言 在Java应用的线上运行环境中,CPU飙高是一个常见且棘手的性能问题。当系统出现CPU飙高时,通常会导致应用响应缓慢,甚至服务不可用,严重影响用户体验和业务运行。因此,掌握一套科学有效的CPU飙高问题排查方法&…...

Python 包管理器 uv 介绍
Python 包管理器 uv 全面介绍 uv 是由 Astral(热门工具 Ruff 的开发者)推出的下一代高性能 Python 包管理器和构建工具,用 Rust 编写。它旨在解决传统工具(如 pip、virtualenv、pip-tools)的性能瓶颈,同时…...
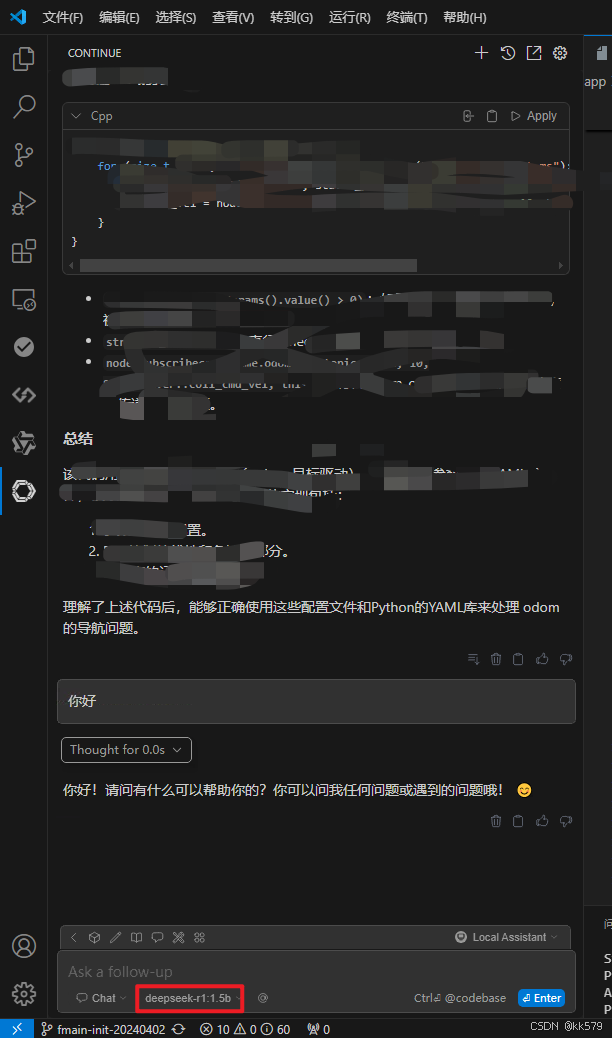
保姆级教程:在无网络无显卡的Windows电脑的vscode本地部署deepseek
文章目录 1 前言2 部署流程2.1 准备工作2.2 Ollama2.2.1 使用有网络的电脑下载Ollama2.2.2 安装Ollama(有网络的电脑)2.2.3 安装Ollama(无网络的电脑)2.2.4 安装验证2.2.5 修改大模型安装位置2.2.6 下载Deepseek模型 2.3 将deepse…...