[C#]基于opencvsharp实现15关键点人体姿态估计
数据集
正确选择数据集以对结果产生适当影响也是非常必要的。在此姿势检测中,模型在两个不同的数据集即COCO关键点数据集和MPII人类姿势数据集上进行了预训练。
1. COCO:COCO关键点数据集是一个多人2D姿势估计数据集,其中包含从Flickr收集的图像。迄今为止,COCO是最大的2D姿势估计数据集,并被视为测试2D姿势估计算法的基准。COCO模型有18种分类。COCO输出格式:鼻子— 0,脖子—1,右肩—2,右肘—3,右手腕—4,左肩—5,左手肘—6,左手腕—7,右臀部—8,右膝盖—9,右脚踝—10,左臀部—11,左膝—12,左脚踝—13,右眼—14,左眼—15,右耳—16,左耳—17,背景—18
2. MPII:MPII人体姿势数据集是一个多人2D姿势估计数据集,包含从Youtube视频中收集的近500种不同的人类活动。MPII是第一个包含各种姿势范围的数据集,也是第一个在2014年发起2D姿势估计挑战的数据集。MPII模型输出15分。MPII输出格式:头—0,脖子—1,右肩—2,右肘—3,右腕—4,左肩—5,左肘—6,左腕—7,右臀部—8,右膝盖—9,右脚踝—10,左臀部—11,左膝盖—12,左脚踝—13,胸部—14,背景—15

这些点是在对数据集进行处理并通过卷积神经网络(CNN)进行全面训练时生成的。
具体步骤
步骤1:需求收集(模型权重)和负载网络
训练有素的模型需要加载到OpenCV中。这些模型在Caffe深度学习框架上进行了训练。Caffe模型包含两个文件,即.prototxt文件和.caffemodel文件。
- .prototxt文件指定了神经网络的体系结构。
- .caffemodel文件存储训练后的模型的权重。
然后我们将这两个文件加载到网络中。
| 1 2 3 4 5 |
|
步骤2:读取图像并准备输入网络
首先,我们需要使用blobFromImage函数将图像从OpenCV格式转换为Caffe blob格式,以便可以将其作为输入输入到网络。这些参数将在blobFromImage函数中提供。由于OpenCV和Caffe都使用BGR格式,因此无需交换R和B通道。
| 1 2 3 4 5 6 7 8 9 |
|
步骤3:做出预测并解析关键点
一旦将图像传递到模型,就可以使用OpenCV中DNN类的正向方法进行预测,该方法通过网络进行正向传递,这只是说它正在进行预测的另一种方式。
| 1 |
|
输出为4D矩阵:
- 第一个维度是图片ID(如果您将多个图片传递到网络)。
- 第二个维度指示关键点的索引。该模型会生成置信度图(在图像上的概率分布,表示每个像素处关节位置的置信度)和所有已连接的零件亲和度图。对于COCO模型,它由57个部分组成-18个关键点置信度图+ 1个背景+ 19 * 2个部分亲和度图。同样,对于MPI,它会产生44点。我们将仅使用与关键点相对应的前几个点。
- 第三维是输出图的高度。
- 第四个维度是输出图的宽度。
然后,我们检查图像中是否存在每个关键点。我们通过找到关键点的置信度图的最大值来获得关键点的位置。我们还使用阈值来减少错误检测。
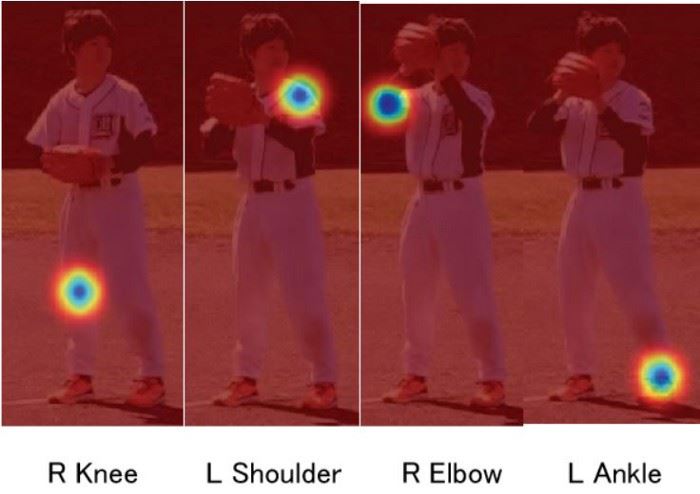
置信度图
一旦检测到关键点,我们便将其绘制在图像上。
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 |
|
步骤4:绘制骨架
由于我们已经绘制了关键点,因此我们现在只需将两对连接即可绘制骨架。
| 1 2 3 4 5 |
|
结果
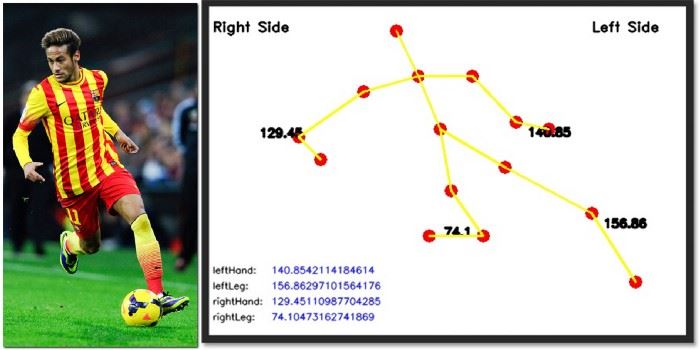
上面显示的输出向我们显示了运动员在特定时刻的准确姿势。下面是视频的检测结果。
【界面展示】
【效果演示】



【部分实现源码】
using System;
using System.Collections.Generic;
using System.ComponentModel;
using System.Data;
using System.Diagnostics;
using System.Drawing;
using System.Linq;
using System.Text;
using System.Threading.Tasks;
using System.Windows.Forms;
using OpenCvSharp;namespace FIRC
{public partial class Form1 : Form{Mat src = new Mat();PoseManager detector = new PoseManager(Application.StartupPath+ "\\weights\\pose_deploy_linevec_faster_4_stages.prototxt", Application.StartupPath + "\\weights\\pose_iter_160000.caffemodel");public Form1(){InitializeComponent();}private void button1_Click(object sender, EventArgs e){OpenFileDialog openFileDialog = new OpenFileDialog();openFileDialog.Filter = "图文件(*.*)|*.jpg;*.png;*.jpeg;*.bmp";openFileDialog.RestoreDirectory = true;openFileDialog.Multiselect = false;if (openFileDialog.ShowDialog() == DialogResult.OK){src = Cv2.ImRead(openFileDialog.FileName);pictureBox1.Image = OpenCvSharp.Extensions.BitmapConverter.ToBitmap(src);}}private void button2_Click(object sender, EventArgs e){if(pictureBox1.Image==null){return;}var resultMat = detector.Inference(src);pictureBox2.Image= OpenCvSharp.Extensions.BitmapConverter.ToBitmap(resultMat); //Mat转Bitmap}private void Form1_Load(object sender, EventArgs e){}private void button3_Click(object sender, EventArgs e){VideoCapture capture = new VideoCapture("test.mp4");if (!capture.IsOpened()){Console.WriteLine("video not open!");return;}Mat frame = new Mat();var sw = new Stopwatch();int fps = 0;while (true){capture.Read(frame);if (frame.Empty()){Console.WriteLine("data is empty!");break;}sw.Start();var result = detector.Inference(frame);sw.Stop();fps = Convert.ToInt32(1 / sw.Elapsed.TotalSeconds);sw.Reset();Cv2.PutText(result, "FPS=" + fps, new OpenCvSharp.Point(30, 30), HersheyFonts.HersheyComplex, 1.0, new Scalar(255, 0, 0), 3);//显示结果Cv2.ImShow("Result", result);int key = Cv2.WaitKey(10);if (key == 27)break;}capture.Release();}}
}
【视频演示】
C# winform基于opencvsharp实现15关键点人体姿态估计_哔哩哔哩_bilibili【测试环境】vs2019netfframework4.7.2opencvsharp4.8.0【演示源码下载】【注意事项】源码演示只支持单人姿态估计,不支持一个图片多人姿态估计,如果需要支持多人姿态估计可以先检测出人,然后截取出来进行单人估计即可更多信息参考博文:https://blog.csdn.net/FL1623863129/article/details/140002519, 视频播放量 1、弹幕量 0、点赞数 0、投硬币枚数 0、收藏人数 0、转发人数 0, 视频作者 未来自主研究中心, 作者简介 未来自主研究中心,相关视频:Python自动化脚本,Python训练AI自动玩王者荣耀,简直不要太秀!!!,yolov9+deepsort+pyqt5实现目标追踪结果演示,将yolov5-6.2封装成一个类几行代码完成语义分割任务,基于onnx模型加密与解密深度学习模型保护方法介绍,C# OpenCvSharp Yolov8 Face Landmarks 人脸五点关键点检测,C++使用纯opencv去部署yolov8官方obb旋转框检测,基于yolov8+bytetrack实现目标追踪视频演示,使用C++部署yolov8的onnx和bytetrack实现目标追踪,C#实现全网yolov7目前最快winform目标检测,C#使用opencvsharp进行年龄和性别预测支持视频图片检测![]() https://www.bilibili.com/video/BV1m1421C7So/?vd_source=989ae2b903ea1b5acebbe2c4c4a635ee
https://www.bilibili.com/video/BV1m1421C7So/?vd_source=989ae2b903ea1b5acebbe2c4c4a635ee
【测试环境】
vs2019
netframework4.7.2
opencvsharp4.8.0
【演示源码下载】
https://download.csdn.net/download/FL1623863129/89486922
【注意事项】
源码演示只支持单人姿态估计,不支持一个图片多人姿态估计,如果需要支持多人姿态估计可以先检测出人,然后截取出来进行单人估计即可
相关文章:
[C#]基于opencvsharp实现15关键点人体姿态估计
数据集 正确选择数据集以对结果产生适当影响也是非常必要的。在此姿势检测中,模型在两个不同的数据集即COCO关键点数据集和MPII人类姿势数据集上进行了预训练。 1. COCO:COCO关键点数据集是一个多人2D姿势估计数据集,其中包含从Flickr收集的…...

lambda-map.merge
map.merge 结论: 1.当前传入的 key ,value biFunction 2.如果之前map不存在则直接put(当前key,当前value) 3.如果之前map已经有了,老value与 当前value 进入function处理后再 put(当前key,处理后的value)...
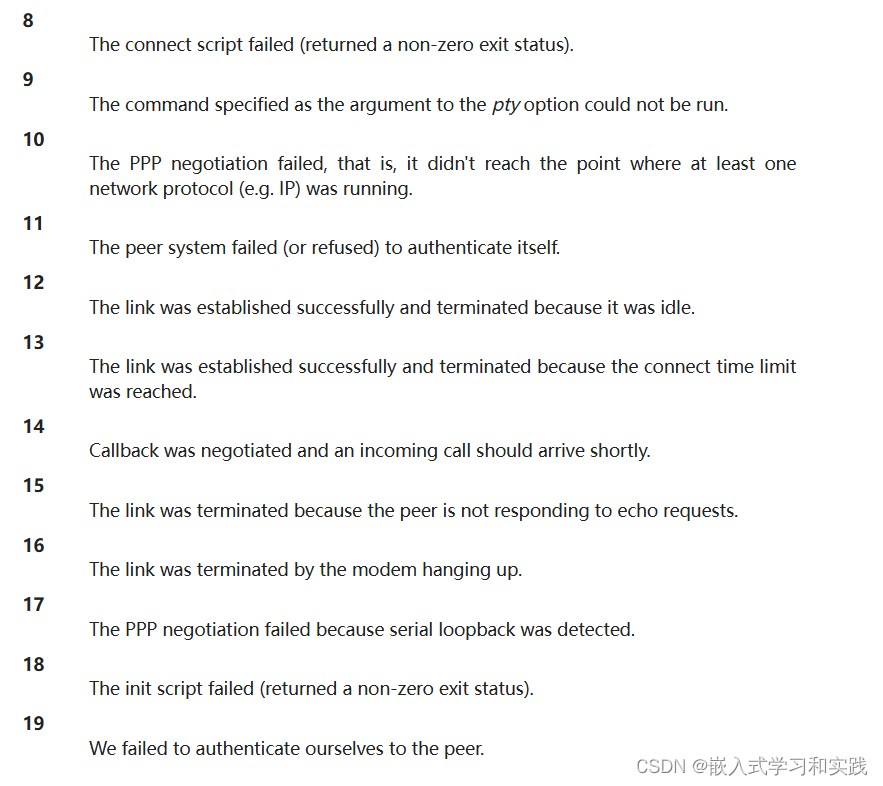
pppd 返回错误码 含义
错误码 00: pppd已经断开,或者已经成功建立连接后请求方又中 断了。 01: 发成了一个严重错误,例如系统调用失败或者访问非法内存。 02: 处理给定操作是检测到错误,例如使用两个互斥的操作。 03:…...

XML 技术
XML 技术 XML(可扩展标记语言)是一种用于存储和传输数据的标记语言。它由万维网联盟(W3C)开发,并在1998年成为正式标准。XML的设计目标是既易于人类阅读,也易于机器解析。它是一种自描述的语言,允许用户定义自己的标签和文档结构。XML被广泛应用于各种领域,包括网络服…...
基于RabbitMQ的异步消息传递:发送与消费
引言 RabbitMQ是一个流行的开源消息代理,用于在分布式系统中实现异步消息传递。它基于Erlang语言编写,具有高可用性和可伸缩性。在本文中,我们将探讨如何在Python中使用RabbitMQ进行消息发送和消费。 安装RabbitMQ 在 Ubuntu 上安装 Rabbi…...

Golang | Leetcode Golang题解之第201题数字范围按位与
题目: 题解: func rangeBitwiseAnd(m int, n int) int {for m < n {n & (n - 1)}return n }...
)
竞争性谈判中,主要谈判什么内容?(电子化招采系统)
问:竞争性谈判中,主要谈判什么内容? 答:竞争性谈判是指采购人或代理机构通过与多家供应商(不少于3家)进行谈判,最后从中确定中标供应商的一种采购方式。在谈判的过程中,谈判的主要内…...

youlai-boot项目的学习(4) 前后端本地部署
环境 1、macOS, brew, IntelliJ IDEA, WebStrom 2、后端:https://gitee.com/youlaiorg/youlai-boot.git , master, 9a753a2e94985ed4cbbf214156ca035082e02723 3、前端:https://gitee.com/youlaiorg/vue3-element-admin.git, master, 66b913ef01dc880ad…...
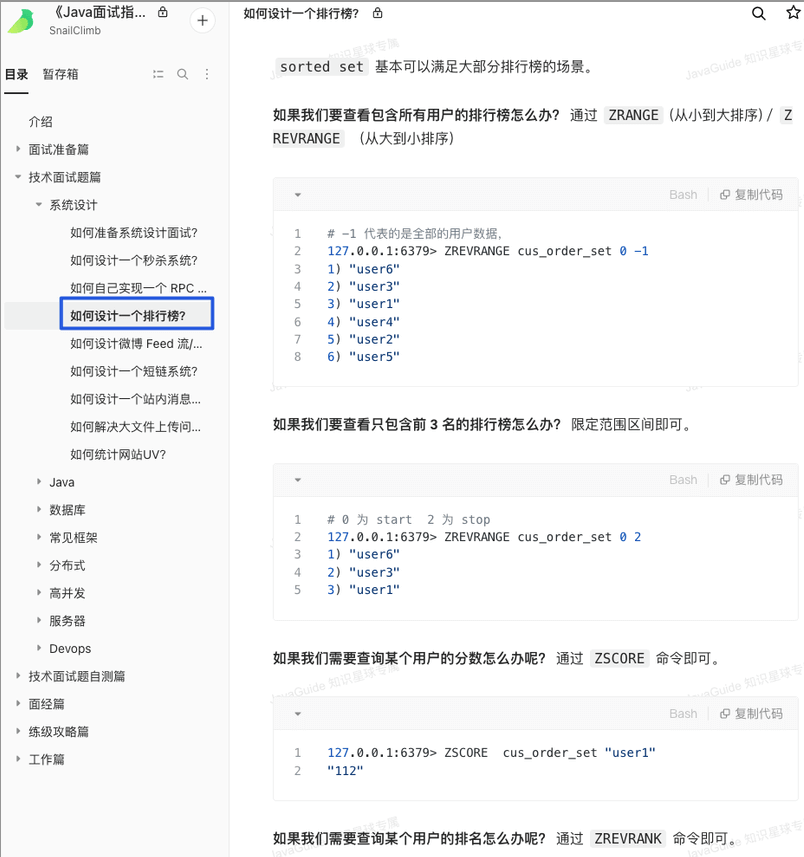
Redis 5 种基础数据结构?
Redis 5 种基本数据结构(String、List、Hash、Set、Sorted Set)在面试中经常会被问到,这篇文章我们一起来回顾温习一下。 还有几种比较特殊的数据结构(HyperLogLogs、Bitmap 、Geospatial、Stream)也非常重要,我们后面下次再聊! 下面是正文。…...

搜维尔科技:SenseGlove Nova2国内首款支持手掌心力回馈手套开售
《SenseGlove Nova 2》现正全球发行中! 搜维尔科技独家代理最新上市的 SenseGlove Nova 2 是世上首款,也是目前市面上唯一一款提供手掌力回馈的无缐VR力回馈手套,它结合了三种最先进的反馈技术,包括主动反馈、强力反馈及震动反馈,…...

Java中的函数式编程入门
Java中的函数式编程入门 大家好,我是免费搭建查券返利机器人省钱赚佣金就用微赚淘客系统3.0的小编,也是冬天不穿秋裤,天冷也要风度的程序猿!今天我来为大家介绍一下Java中的函数式编程。随着Java 8的发布,函数式编程成…...
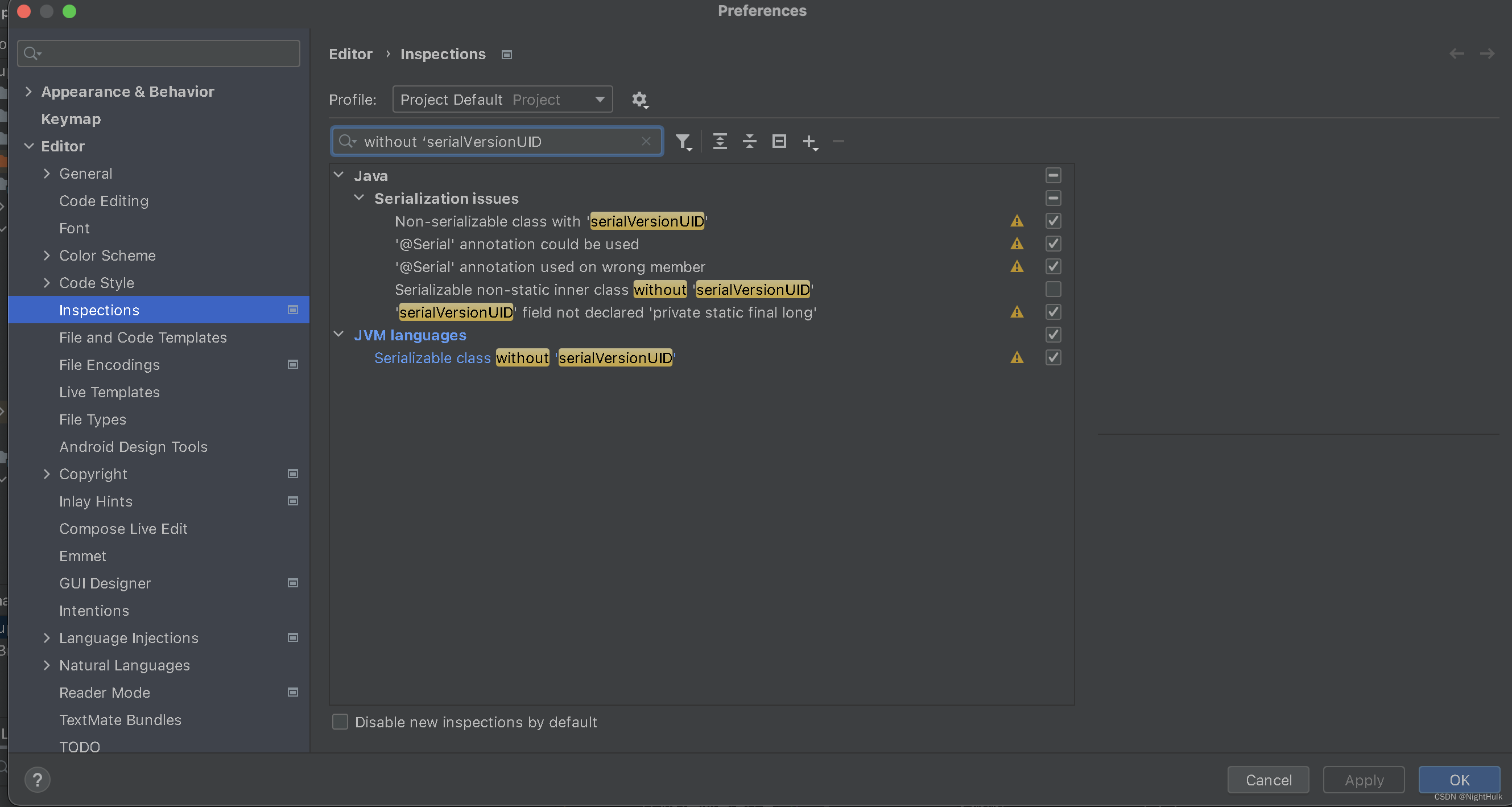
idea 自动生成序列化数字
目标:当类继承Serializable后自动生成序列化Uid 网上查了很多说勾选class without ‘serialVersionUID’ 但是我勾选没用 最后发现,我勾选的是Serialization issues里面的配置,要勾选的是JVM languages下的 如下图所示,记录一下…...
)
Java数据结构算法(最长递增序列二分查找)
前言: 最长递增子序列(Longest Increasing Subsequence, LIS)是指在一个给定的序列中,找到一个最长的子序列,使得这个子序列中的元素是单调递增的。子序列不要求在原序列中连续。 实现原理 使用一个 tails 列表,其中…...

编译VTK静态库
编译VTK静态库遇到问题 vtkCommonCore-9.3d.lib(vtkSMPToolsAPI.obj) : error LNK2019: unresolved external symbol "public: bool __cdecl vtk::detail::smp::vtkSMPToolsImpl<1>::IsParallelScope(void)" (?IsParallelScope?$vtkSMPToolsImpl$00smpdetai…...

Python中的@property装饰器:深入理解与应用
Python中的property装饰器:深入理解与应用 在Python中,property装饰器是一个强大的工具,它允许我们将方法作为属性来访问,使得代码更加简洁、清晰,并提供了更好的封装性。本文将深入探讨property装饰器的工作原理、应…...
)
springCloudalibabaAI孵化(一)
目录 1、what 1、简介 2、核心概念 3、高级特性 Prompt 和 AiResponse 4、功能 2、How 1、前言 2、在项目 pom.xml 中加入 2023.0.1.0 版本 Spring Cloud Alibaba 依赖: 3、在 配置文件中加入以下配置:application.yml 4、编写聊天服务实现类&a…...

【封装】Unity编辑器模式GUID加载资源
介绍 在编辑器模式下通过GUID获取工程目录下的指定资源的接口工具封装 工具原理 借助AssetDatabaseAPI FindAssets : 获取 GUID GUIDToAssetPath : 通过GUID获取路径LoadAssetAtPath<T>: 通过路径加载资源 代码: public static class GetAssetUtil {pub…...

安装 Docker 环境(通过云平台创建一个实例实现)
目录 1. 删除原有 yum 2. 手动配置 yum 源 3. 删除防火墙规则 4. 保存防火墙配置 5. 修改系统内核。打开内核转发功能。 6. 安装 Docker 7. 设置本地镜像仓库 8.重启服务 1. 删除原有 yum rm -rfv /etc/yum.repos.d/* 2. 手动配置 yum 源 使用 centos7-1511.iso 和 Xi…...

MySQL之可扩展性(六)
可扩展性 向外扩展 12.重新均衡分片数据 如有必要,可以通过在分片间移动数据来达到负载均衡。举个例子,许多读者可能听一些大型图片分享网站或流行社区网站的开发者提到过用于分片间移动用户数据的工具。在分片间移动数据的好处很明显。例如ÿ…...

C++ | Leetcode C++题解之第202题快乐数
题目: 题解: class Solution { public:int ProductSum(int n){int sum 0;while(n){int temp n % 10;sum temp*temp;n / 10;}return sum;}bool isHappy(int n) {int slow n,fast n;// 快慢指针,找环的相遇位置do{slow ProductSum(slow)…...
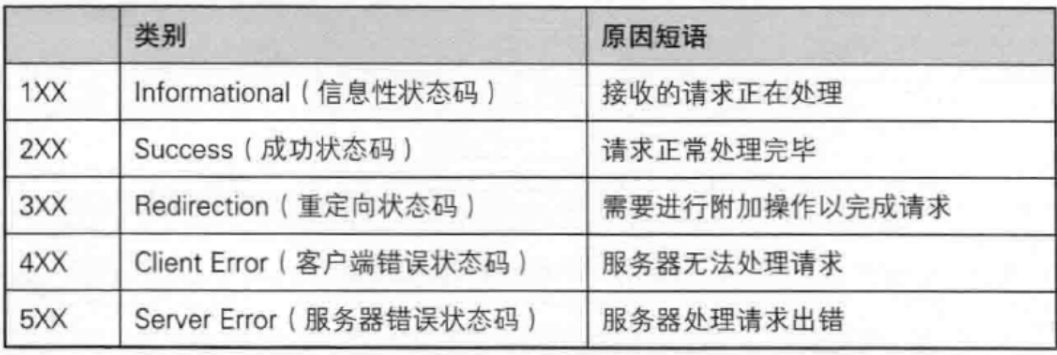
【JavaEE】-- HTTP
1. HTTP是什么? HTTP(全称为"超文本传输协议")是一种应用非常广泛的应用层协议,HTTP是基于TCP协议的一种应用层协议。 应用层协议:是计算机网络协议栈中最高层的协议,它定义了运行在不同主机上…...
《从零掌握MIPI CSI-2: 协议精解与FPGA摄像头开发实战》-- CSI-2 协议详细解析 (一)
CSI-2 协议详细解析 (一) 1. CSI-2层定义(CSI-2 Layer Definitions) 分层结构 :CSI-2协议分为6层: 物理层(PHY Layer) : 定义电气特性、时钟机制和传输介质(导线&#…...

系统设计 --- MongoDB亿级数据查询优化策略
系统设计 --- MongoDB亿级数据查询分表策略 背景Solution --- 分表 背景 使用audit log实现Audi Trail功能 Audit Trail范围: 六个月数据量: 每秒5-7条audi log,共计7千万 – 1亿条数据需要实现全文检索按照时间倒序因为license问题,不能使用ELK只能使用…...

渲染学进阶内容——模型
最近在写模组的时候发现渲染器里面离不开模型的定义,在渲染的第二篇文章中简单的讲解了一下关于模型部分的内容,其实不管是方块还是方块实体,都离不开模型的内容 🧱 一、CubeListBuilder 功能解析 CubeListBuilder 是 Minecraft Java 版模型系统的核心构建器,用于动态创…...

拉力测试cuda pytorch 把 4070显卡拉满
import torch import timedef stress_test_gpu(matrix_size16384, duration300):"""对GPU进行压力测试,通过持续的矩阵乘法来最大化GPU利用率参数:matrix_size: 矩阵维度大小,增大可提高计算复杂度duration: 测试持续时间(秒&…...
Spring数据访问模块设计
前面我们已经完成了IoC和web模块的设计,聪明的码友立马就知道了,该到数据访问模块了,要不就这俩玩个6啊,查库势在必行,至此,它来了。 一、核心设计理念 1、痛点在哪 应用离不开数据(数据库、No…...
均衡后的SNRSINR
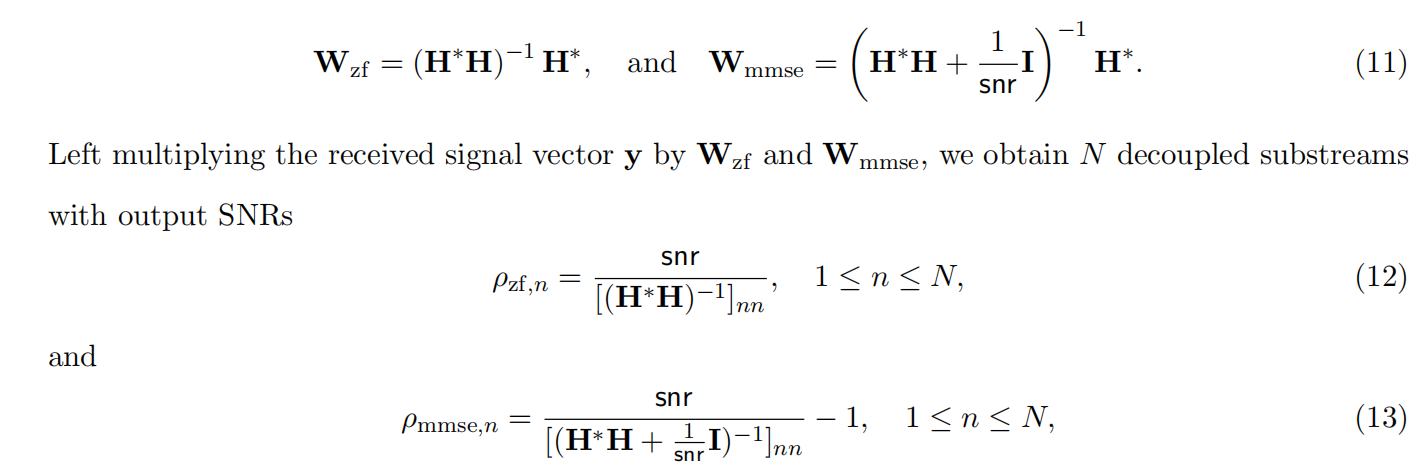
本文主要摘自参考文献中的前两篇,相关文献中经常会出现MIMO检测后的SINR不过一直没有找到相关数学推到过程,其中文献[1]中给出了相关原理在此仅做记录。 1. 系统模型 复信道模型 n t n_t nt 根发送天线, n r n_r nr 根接收天线的 MIMO 系…...
微软PowerBI考试 PL300-在 Power BI 中清理、转换和加载数据
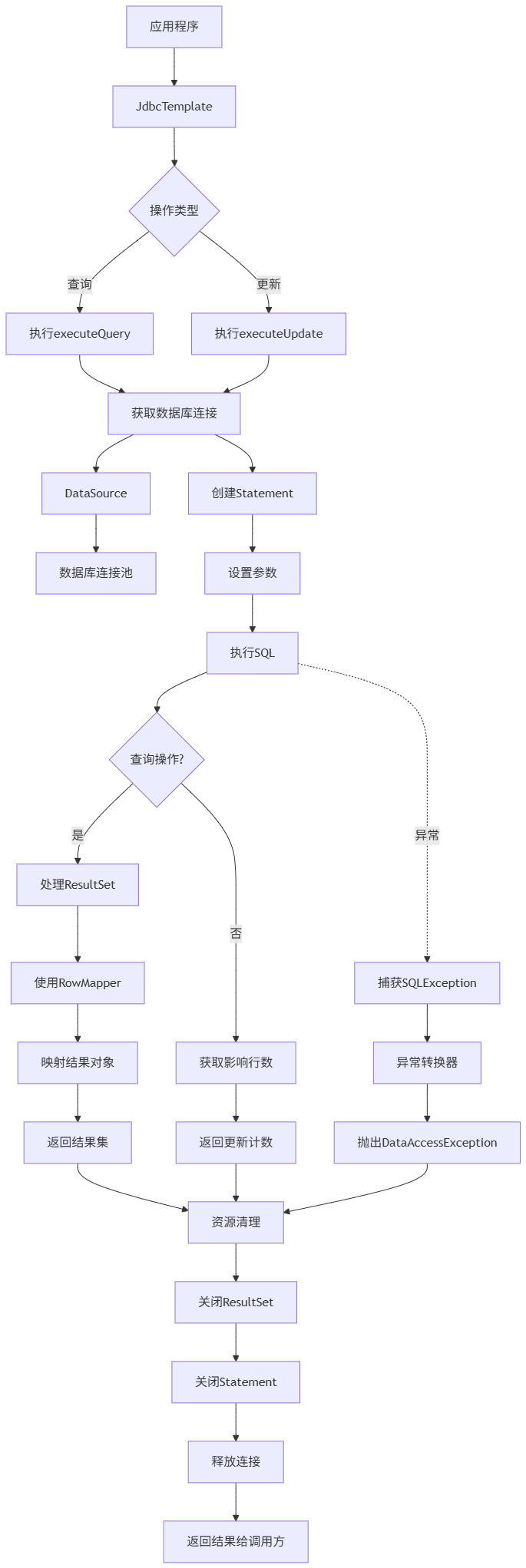
微软PowerBI考试 PL300-在 Power BI 中清理、转换和加载数据 Power Query 具有大量专门帮助您清理和准备数据以供分析的功能。 您将了解如何简化复杂模型、更改数据类型、重命名对象和透视数据。 您还将了解如何分析列,以便知晓哪些列包含有价值的数据,…...

毫米波雷达基础理论(3D+4D)
3D、4D毫米波雷达基础知识及厂商选型 PreView : https://mp.weixin.qq.com/s/bQkju4r6med7I3TBGJI_bQ 1. FMCW毫米波雷达基础知识 主要参考博文: 一文入门汽车毫米波雷达基本原理 :https://mp.weixin.qq.com/s/_EN7A5lKcz2Eh8dLnjE19w 毫米波雷达基础…...
系统掌握PyTorch:图解张量、Autograd、DataLoader、nn.Module与实战模型
本文较长,建议点赞收藏,以免遗失。更多AI大模型应用开发学习视频及资料,尽在聚客AI学院。 本文通过代码驱动的方式,系统讲解PyTorch核心概念和实战技巧,涵盖张量操作、自动微分、数据加载、模型构建和训练全流程&#…...