OpenGL系列(六)摄像机
在 OpenGL系列(六)变换 中,一个目标物体经过模型矩阵、观察矩阵和投影矩阵的变换才能正常显示出来,其中模型矩阵主要针对目标物体,它会影响物体的位姿。观察矩阵和投影矩阵主要针对观察者而已,这两个变换决定了观察者以怎样的视角观察世界,可以把观察者比作一台摄像机,摄像机拍摄景象的角度由观察矩阵和投影矩阵决定。
在本例中要实现摄像机类Camera,该类主要向外提供观察矩阵和投影矩阵,类定义如下。
class Camera {
public:Camera();virtual ~Camera();glm::mat4 getViewMatrix();virtual glm::mat4 getProjectionMatrix();
private:glm::vec3 mPosition = glm::vec3(0.0f,0.0f,1.0f);glm::vec3 mUp = glm::vec3(0.0f,1.0f,0.0f);glm::vec3 mRight = glm::vec3(1.0f,0.0f,0.0f);};在Camera类主要成员如下。
- mPosition表示摄像机的位置。
- mUp表示摄像机上方的方向。
- mRight表示摄像机右边的方向。
- getViewMatrix返回观察矩阵。
- getProjectionMatrix返回投影矩阵。
投影矩阵有两种,一种是正交投影矩阵,一种是透视投影,因此可以从Camera派生出两个子类,一个是OrthographicCamera表示正交投影摄像机,一个是PerspectiveCamera表示透视投影摄像机。
正交投影摄像机类为OrthographicCamera,定义如下。
class OrthographicCamera: public Camera{
public:OrthographicCamera(float left,float right,float top,float bottom,float near,float far);~OrthographicCamera();glm::mat4 getProjectionMatrix() override;private:float mLeft{0.0f};float mRight{0.0f};float mTop{0.0f};float mBottom{0.0f};float mNear{0.0f};float mFar{0.0f};
};OrthographicCamera主要成员解析如下。
mLeft、mRight、mTop、mBottom、mNear、mFar分别表示裁剪空间的左、右、上、下、近、远。
getProjectionMatrix重新了父类的方法,返回正交投影摄像机的投影矩阵。
透视投影摄像机类为PerspectiveCamera,定义如下。
class PerspectiveCamera: public Camera{
public:PerspectiveCamera(float fovy, float aspect, float near, float far);~PerspectiveCamera();glm::mat4 getProjectionMatrix() override;
private:float mFovy{0.0f};float mAspect{0.0f};float mNear{0.0f};float mFar{0.0f};
};PerspectiveCamera主要成员解析如下。
- mFovy表示视张角
- mAspect表示宽高比
- mNear表示近裁剪面
- mFar表示远裁剪面。
类定义完后,接下来实现返回观察矩阵和投影矩阵。
观察矩阵的计算方法如下。
glm::mat4 Camera::getViewMatrix(){glm::vec3 front = glm::cross(mUp,mRight);glm::vec3 center = mPosition + front;return glm::lookAt(mPosition,center,mUp);
}观察矩阵的计算步骤如下。
- 对mUp和mRight进行叉乘得到向前的向量
- 当前位置加上向前向量得到观察的中心点,只要沿着该向量向前任何一个点都可以作为观察中心点。
- 通过lookAt返回观察矩阵,第1个参数是摄像机的位置,第2个参数是观察中心点,第3个参数是摄像机向上的向量
正交投影摄像机和透视投影摄像机的观察矩阵是一样的,所以放到父类Camera实现,但是投影矩阵就有差异,所以放到各自子类实现。
正交投影摄像机的投影矩阵实现如下。
glm::mat4 OrthographicCamera::getProjectionMatrix() {return glm::ortho(mLeft,mRight,mBottom,mTop,mNear,mFar);
}调用glm的ortho即可返回正交投影矩阵。
透视投影摄像机的投影矩阵实现如下。
glm::mat4 PerspectiveCamera::getProjectionMatrix() {return glm::perspective(glm::radians(mFovy),mAspect,mNear,mFar);
}调用glm的perspective可返回投影投影矩阵。
该示例的工程已经上传到,地址如下
示例工程代码
在开发过程中,首先要确定射线机的类型,以确定是创建OrthographicCamera对象还是PerspectiveCamera对象,摄像机对象创建好以后,一般不会修改投影矩阵,但是经过修改摄像机的观察角度,通过对Camera的mPosition、mRight和mUp可以改变观察的角度。有以下情况。
修改mPosition可以摄像机的前后左右上下移动。
修改mUp可以实现类似点头的效果。
修改mRight可以实现摇头的效果
同时修改mUp和mRight可以实现观察角度的左右倾斜。
同时修改mPosition和mRight可以实现围绕某个点左右转动,假设围绕转动的点是某个物体的中心点,转动一圈可以观察到物体前后左右4个面
同时修改mPosition和mUp可以实现围绕某个点上下转动,转动一圈可以观察某个物体的上、下、前、后4个面。
相关文章:
摄像机)
OpenGL系列(六)摄像机
在 OpenGL系列(六)变换 中,一个目标物体经过模型矩阵、观察矩阵和投影矩阵的变换才能正常显示出来,其中模型矩阵主要针对目标物体,它会影响物体的位姿。观察矩阵和投影矩阵主要针对观察者而已,这两个变换决…...

一个端口配置两个vue和后端服务,nginx以及前后端服务怎么配?
nginx配置重点看server中的内容: worker_processes 8; pid /usr/local/nginx/logs/nginx.pid;events {# 此为 Linux 系统特为处理大批量文件描述符而作改进的 poll 事件模型use epoll;worker_connections 512; # 工作进程的最大连接数量# 允许同时接受多个网络连…...
295. 数据流的中位数
class MedianFinder {Queue<Integer> A,B;public MedianFinder() {A new PriorityQueue<>();//小根堆存储后半部分B new PriorityQueue<>((x,y)->(y-x));//大根堆存储前半部分}public void addNum(int num) {if(A.size()0 && B.size()0){B.add(…...
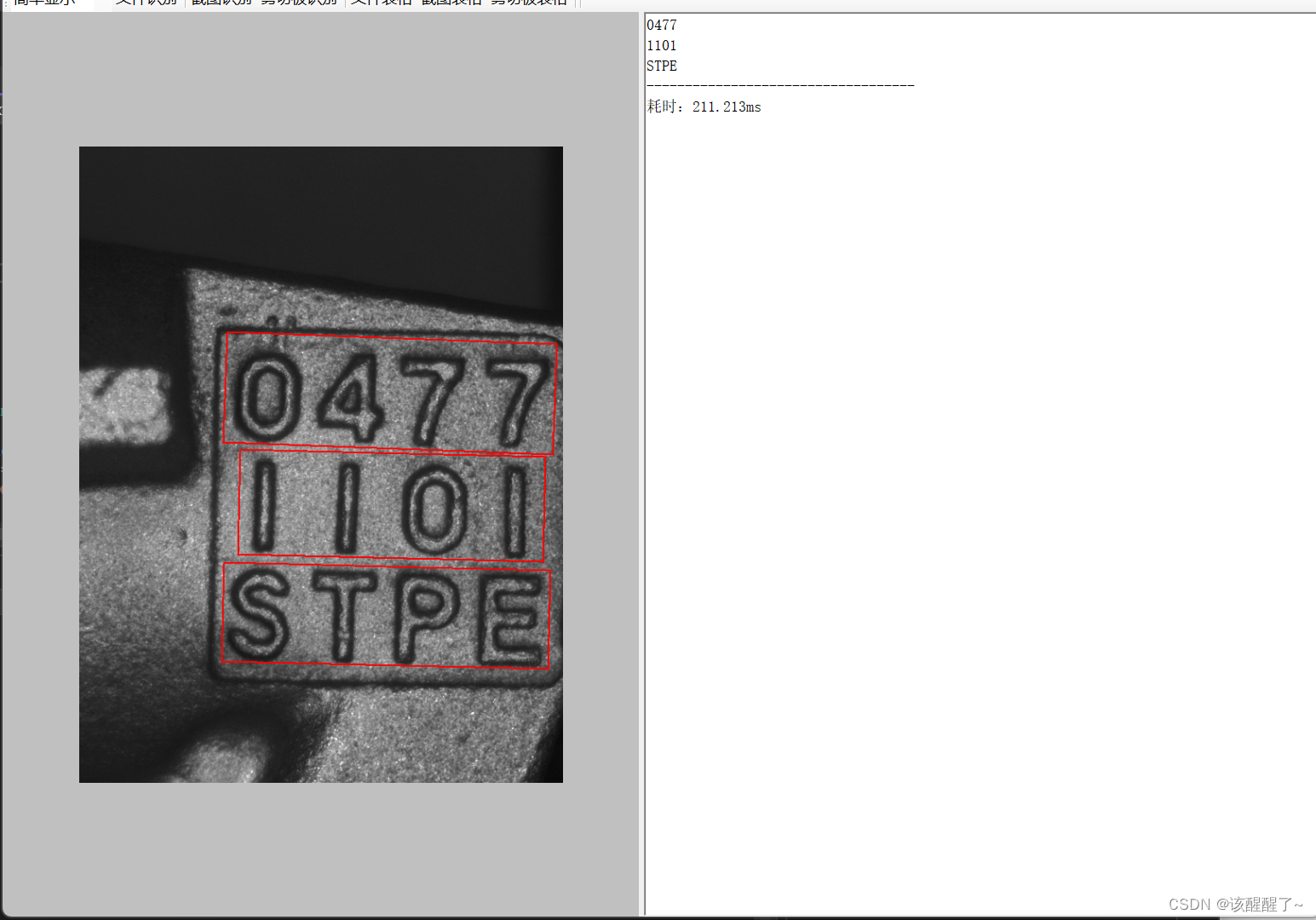
OCR训练和C#部署英文字符训练
PaddleOCR是一个基于飞桨开发的OCR(Optical Character Recognition,光学字符识别)系统。其技术体系包括文字检测、文字识别、文本方向检测和图像处理等模块。以下是其优点: 高精度:PaddleOCR采用深度学习算法进行训练…...
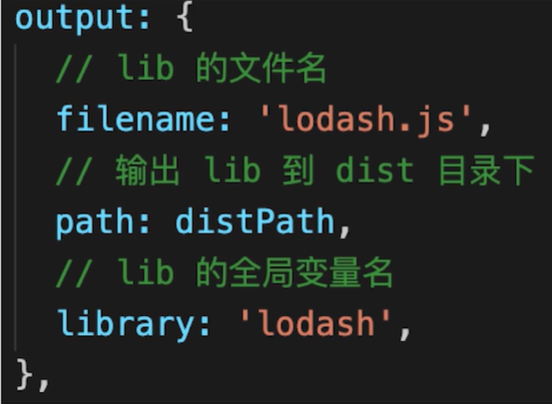
webpack【实用教程】
基础配置 配置的拆分和合并 通常 webpack 的配置文件会有3个 webpack.common.js 公共配置(会被另外两个配置文件导入并合并)webpack.dev.js 开发环境的配置webpack.prod.js 生产环境的配置 开发环境的本地服务 在 webpack.dev.js 中配置 devServer:…...

如何使用C++进行文件读写操作
在C中,我们可以使用标准库中的 <fstream>(文件流)来进行文件的读写操作。以下是一些基本的文件读写操作的示例。 读取文件 cpp复制代码 #include <fstream> #include <iostream> #include <string> int main() { s…...

Tensorflow Lite移动平台编译
Android平台编译 如果不做定制化操作,我们不需要自己编译TensorFlow Lite Android库。我们可以直接使用位于MavenCentral的TensorFlow Lite AAR。但是在某些情况下,我们需要本地编译TensorFlow Lite。例如,您可能正在构建一个包含operations selected from TensorFlow的自定…...
)
2024年6月24日-6月30日(ue5肉鸽视频p16-p25)
试过重点放在独立游戏上,有个indienova独立游戏团队是全职的,由于他们干了几个月,节奏暂时跟不上,紧张焦虑了。五一时也有点自暴自弃了,实在没必要,按照自己的节奏走即可。精力和时间也有限,放在…...

LeetCode.面试题17.24.最大子矩阵详解
问题描述 给定一个正整数、负整数和 0 组成的 N M 矩阵,编写代码找出元素总和最大的子矩阵。 返回一个数组 [r1, c1, r2, c2],其中 r1, c1 分别代表子矩阵左上角的行号和列号,r2, c2 分别代表右下角的行号和列号。若有多个满足条件的子矩阵…...

云动态摘要 2024-06-28
给您带来云厂商的最新动态,最新产品资讯和最新优惠更新。 最新优惠与活动 [新客专享]WeData 限时特惠 腾讯云 2024-06-21 数据分类分级管理,构建数据安全屏障 ,仅需9.9元! 云服务器ECS试用产品续用 阿里云 2024-04-14 云服务器…...
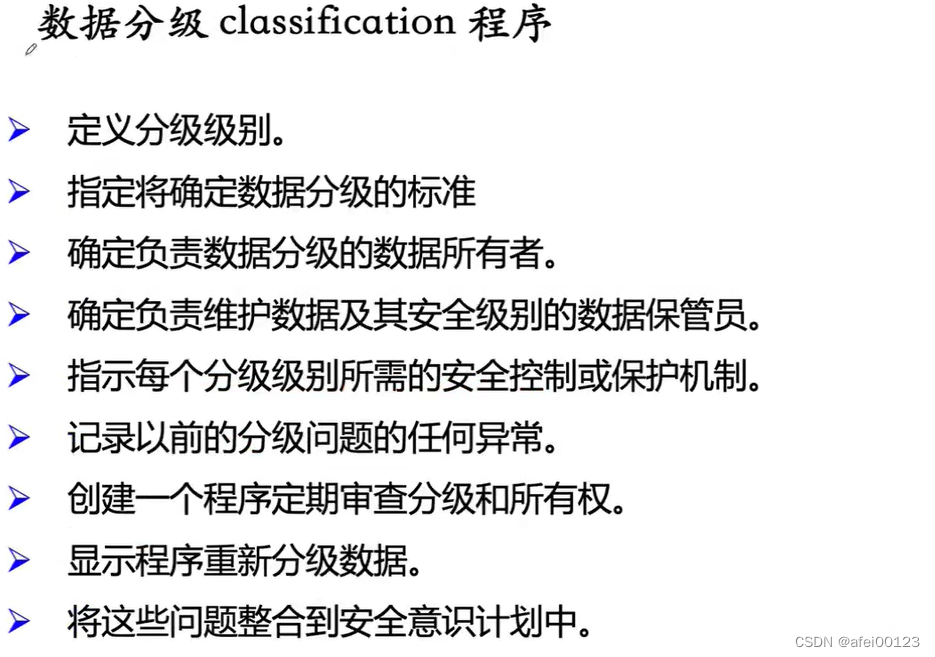
六、资产安全—信息分级资产管理与隐私保护(CISSP)
目录 1.信息分级 2.信息分级方法 3.责任的层级 4.资产管理 5.隐私数据管理角色 6.数据安全控制 7.数据保护方案 8.使用安全基线 六、资产安全—数据管理(CISSP): 五、身份与访问管理—身份管理和访问控制管理(CISSP): 1.信息分级 信息分级举列: 2.信息分级方…...

香港服务器托管对外贸行业必要性和优势
在当今全球化的经济环境下,外贸企业面临着前所未有的机遇与挑战。其中,服务器托管的选择对于外贸企业的运营效率和市场拓展具有举足轻重的作用。香港服务器,凭借其独特的地理位置、优质的网络环境和卓越的服务性能,一直是外贸企业…...

Vue Router 导航守卫,多次执行的解决方案
Vue Router 是 Vue.js 官方提供的路由器,它用于处理单页应用(SPA)中的路由导航。在 Vue Router 中,导航守卫是非常重要的功能,它可以在路由跳转之前或之后执行一些特定的操作。但是,如果你不小心,导航守卫可能会多次执行,这可能会导致一些问题。本文将介绍如何避免导航…...

SpringBoot集成道历(实现道历日期查询)
官网地址:官网地址https://6tail.cn/calendar/api.html 1、导入依赖 <dependency><groupId>cn.6tail</groupId><artifactId>lunar</artifactId><version>1.3.9</version></dependency><dependency><group…...
面对.rmallox勒索病毒:如何有效防范及应对
引言: 在当今数字化社会,网络安全问题日益严重,勒索病毒成为企业和个人不可忽视的威胁之一。最近出现的.rmallox勒索病毒更是给全球各地的用户带来了严重的数据安全问题。本文将探讨.rmallox勒索病毒的特点、感染方式及应对策略,…...

嘉立创学习
1.两个设置,一般用左边那个 2.焊盘分类 基本焊盘 热风盘:也叫花焊盘(负片) 隔离焊盘:外面那圈黑色,用作隔离(负片) 钢网层:(锡膏) 阻焊层&…...

ECharts 响应式设计
ECharts 响应式设计 ECharts 是一个由百度开源的,基于 JavaScript 的可视化库,它提供了一系列丰富的图表类型和灵活的配置选项,使得数据可视化变得简单而高效。在当今数据驱动的世界中,ECharts 已经成为许多开发者和设计师的首选工具,用于创建交互式和视觉吸引力强的图表…...

基于java语言+springboot技术架构开发的 互联网智能3D导诊系统源码支持微信小程序、APP 医院AI智能导诊系统源码
基于java语言springboot技术架构开发的 互联网智能3D导诊系统源码支持微信小程序、APP 医院AI智能导诊系统源码 一、智慧导诊系统开发原理 导诊系统从原理上大致可分为基于规则模板和基于数据模型两类。 1、基于规则推理的方法通过人工建立症状、疾病和科室之间的对应规则实现…...
MySQL事务——Java全栈知识(31)
1、事务的特性 原子性(Atomicity):事务是不可分割的最小操作单元,要么全部成功,要么全部失败。 一致性(Consistency):事务完成时,必须使所有的数据都保持一致状态。 隔离…...

2毛钱不到的2A同步降压DCDC电压6V频率1.5MHz电感2.2uH封装SOT23-5芯片MT3520B
前言 2A,2.3V-6V输入,1.5MHz 同步降压转换器,批量价格约0.18元 MT3520B 封装SOT23-5 丝印AS20B5 特征 高效率:高达 96% 1.5MHz恒定频率操作 2A 输出电流 无需肖特基二极管 2.3V至6V输入电压范围 输出电压低至 0.6V PFM 模式可在…...

第 5 篇:让 Claude 少犯错,验证机制、测试策略与发布检查清单
📌 本篇核心目标:建立"改完就验"的协作习惯。掌握内容型知识库项目的三套检查清单设计方法,学会自动化测试与手动验证的搭配策略,以及如何把验证步骤嵌入 Claude 的工作流中。规则写了,Claude 就一定遵守吗&…...

【毕业设计】SpringBoot+Vue+MySQL 企业内管信息化系统平台源码+数据库+论文+部署文档
摘要 随着信息技术的快速发展,企业内部管理的信息化需求日益增长。传统的手工管理模式已无法满足现代企业对高效、精准管理的需求,尤其是在人力资源管理、财务管理和项目管理等方面。企业内管信息化系统平台通过整合业务流程、优化资源配置,能…...

Laravel学习指南:从入门到精通
好的,这是一份结构清晰的Laravel学习路径指南,希望能帮助你逐步掌握这个强大的PHP框架: Laravel 学习之路:循序渐进掌握现代 PHP 开发 🛠 阶段一:基础准备与环境搭建 PHP 基础巩固: 确保你对…...

VS2022从零开始构建C++项目的完整指南
1. 环境准备与项目创建 第一次打开Visual Studio 2022时,那个启动界面可能会让你有点懵。别担心,我刚开始用的时候也这样。先找到右下角那个醒目的"创建新项目"按钮,点它。这时候会弹出一个项目模板选择窗口,这里有个小…...

打工人效率神器!OpenClaw 办公常用 Skill 全汇总 + 一键安装教程
前言 2026 年爆火的开源 AI 智能体OpenClaw(被网友亲切称为 “大龙虾”),彻底打破了传统 AI 只给建议、不落地执行的痛点,能直接操控电脑完成各类实操任务,堪称办公生活的全能助理。 对于咱们打工人来说,不用懂复杂代码,装上实用 Skill 就能实现文档自动化、办公协作提…...

救命神器!全行业通用AI论文网站,千笔ai写作 VS 学术猹
在学术写作的道路上,每一个学生都曾经历过论文写作的煎熬:从选题的迷茫到大纲的构思,从初稿的反复修改到文献的大量查阅,再到降重、查重、格式调整,最后是答辩PPT的准备,每一步都充满了挑战。而这些繁琐的流…...

Arduino AT24Cxx EEPROM类型安全驱动库详解
1. 项目概述EEPROMHandler 是一款专为 Arduino 兼容平台设计的 AT24Cxx 系列 IC 外部 EEPROM 存储芯片驱动辅助库。其核心定位并非替代底层 Wire 库,而是构建在标准 IC 通信协议之上、面向嵌入式数据持久化场景的类型安全(type-safe)抽象层。…...

DIY植物生长箱环境监测系统:STM32+温湿度+气压+CO2一站式解决方案
DIY植物生长箱环境监测系统:STM32温湿度气压CO2一站式解决方案 在家庭种植和实验室研究中,精确控制植物生长环境是提升作物品质的关键。传统温湿度计和CO2检测仪往往功能单一、数据分散,而市面上的专业环境监测设备又价格昂贵。本文将带你用S…...
)
百度网盘黑科技:教你自定义分享密码(附最新可用代码)
百度网盘分享功能进阶技巧:个性化密码设置实战指南 在数字资源共享日益频繁的今天,百度网盘作为国内主流云存储平台,其文件分享功能被广泛使用。然而,系统自动生成的随机提取码往往难以记忆,给分享双方都带来不便。本…...

本科毕业论文 AI 写作新范式:Paperzz,让 12000 字本科论文高效落地
Paperzz-AI官网免费论文查重复率AIGC检测/开题报告/文献综述/论文初稿paperzz - 毕业论文-AIGC论文检测-AI智能降重-ai智能写作https://www.paperzz.cc/dissertation 一、开篇:本科毕业论文,不止是毕业门槛,更是学术成长的第一站 对于每一位…...