STM32之SPI
SPI
SPI介绍
SPI是串行外设接口(Serial Peripherallnterface)的缩写,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为PCB的布局上节省空间,提供方便,正是出于这种简单易用的特性,越来越多的芯片集成了这种通信协议比如AT91RM9200。
SPI物理架构
SPI总线包含四条总线:分别是SCK、MOSI、MISO、NSS(CS)。
MISO:主设备输入/从设备输出引脚。该引脚在从模式下发送数据,在主模式下接收数据。
MOSl:主设备输出/从设备输入引脚。该引脚在主模式下发送数据,在从模式下接收数据。
SCK:串口时钟,作为主设备的输出,从设备的输入。
NSS(CS): 由主设备控制,用来选择指定的从设备进行通信。(当主设备想要读/写从设备时,它首先拉低从设备对应的NSS线)
SPI工作原理
SPI主从模式
SPI分为主、从两种模式,一个SPI通讯系统需要包含一个(且只能是一个)主设备,一个或多个从设备。提供时钟的为主设备(Master),接收时钟的设备为从设备(Slave),SPI接口的读写操作,都是由主设备发起。当存在多个从设备时,主设备通过从设备各自的片选信号(NSS)来选择从设备。
SPI主、从设备通讯接线
一个主设备和一个从设备

一个主设备和多个从设备

SPI数据传输
SPI主设备和从设备都有一个移位寄存器,主机可以通过向它的移位寄存器写入数据来发起一次SPI通讯。

主设备拉低对应从设备的NSS信号线。(选择从设备进行通信)
主设备发送时钟信号,从设备接收时钟信号。(告诉从设备开始进行SPI通讯)
数据交换
主设备(Master)将要发送的数据传输到发送缓存区(Menory),当从设备收到主设备发送的时钟信号,并且在MOSI引脚上出现第一个数据位时,发送过程开始。余下的位被装进移位寄存器,通过MOSI信号线将字节一位一位的发送给从设备。同时主设备通过MISO引脚将数据一位一位的接收到移位寄存器,当数据接收完成时,将数据传输到接收缓冲区。
从设备同理,将自己发送缓冲区的数据通过移位寄存器和MISO一位一位发送给主设备,同时通过MOSI引脚将数据一位一位的接收到移位寄存器,当数据接收完成时,将数据传输到接收缓冲区。
SPI只有主模式和从模式之分,没有读和写的说法,数据的写操作和读操作是同步完成的。
如果只进行写操作,主机只需忽略接收到的字节
如果只进行读操作,只需发送一个空字节来获取SPI通讯的一个字节。
SPI工作模式
时钟极性(CPOL)
控制在没有数据传输时时钟线的空闲状态电平。
0:SCK在空闲状态保持低电平。
1:SCK在空闲状态保持高电平。
时钟相位(CPHA)
时钟线在第几个时钟边沿采样信号。
0:SCK的第一个(奇数)边沿进行数据位采样,数据在第一个时钟边沿被锁存。
1:SCK的第二个(偶数)边沿进行数据位采样,数据在第二个时钟边沿被锁存。
SPI模式
SPI模式 | CPOL | CPHA | 空闲时SCK时钟 | 采样时刻 |
模式0 | 0 | 0 | 低电平 | 奇数边沿 |
模式1 | 0 | 1 | 低电平 | 偶数边沿 |
模式2 | 1 | 0 | 高电平 | 奇数边沿 |
模式3 | 1 | 1 | 高电平 | 偶数边沿 |
模式0(常用)(CPOL = 0,CPHA = 0)
空闲时SCK时钟为低电平,采样时刻为第一个边沿即上升沿。如图所示,黄线进行采样

模式1(CPOL = 0,CPHA = 1)
空闲时SCK时钟为低电平,采样时刻为第二个边沿即下降沿。如图所示,黄线进行采样。

模式2(CPOL = 1,CPHA = 0)
空闲时SCK时钟为高电平,采样时刻为第一个边沿即下降沿。如图所示,黄线进行采样。

模式3(常用)(CPOL = 1,CPHA = 1)
空闲时SCK时钟为高电平,采样时刻为第二个边沿即上升沿。如图所示,黄线进行采样。

W25Q128
W25Q128介绍
W25Q128是华邦公司推出的一款SPI接口的NOR FIash芯片,其存储空间为128 Mbit,相当于16M字节。
Flash 是常用的用于储存数据的半导体器件,它具有容量大,可重复擦写、按”扇区/块”擦除、掉电后数据可继续保存的特性。
Flash 是有一个物理特性:只能写0,不能写1,靠擦除来写1。
W25Q128存储架构
一个W25Q128 = 256个块 = 256 * 16个扇区 = 256 * 16 *16个页 = 256 * 16 * 16 * 256个字节,即16777216字节,约16M字节,即寻址范围为0x00 ~ 0xFFFFFF。
16777216 -1 = 0xFFFFFF。
对Flash擦除时一般按扇区(4K = 4096字节)来进行擦除。

W25Q128状态寄存器
W25Q128一共有3个状态寄存器,它们的作用时跟踪芯片的状态。其中,状态寄存器1比较常用。

BUSY位
BUSY是状态寄存器中的只读位,当设备执行页程序、四页程序、扇区擦除、块擦除、芯片擦除、写状态寄存器或擦除/程序安全寄存器指令时,将其设置为1状态。 在此期间,器件将忽略除读取状态寄存器和擦除/程序挂起指令之外的其他指令。 当编程、擦除或写入状态/安全寄存器指令完成时,忙位将被清除为0状态,表示设备已准备好接受进一步的指令。
0:空闲
1:忙
WEL位
WEL是状态寄存器(S1)中的只读位,在执行写使能指令后被设置为1。 当设备被禁止写入时,WEL状态位被清除为0。 在上电时或在下列任何指令之后发生写禁用状态:写禁用、页程序、四页程序、扇区擦除、块擦除、芯片擦除、写状态寄存器、擦除安全寄存器和程序安全寄存器。
1:可以操作页、扇区、块
0:禁止写入
W25Q128常用指令
W25Q128有非常多的指令,在这里介绍几个常用的指令。
指令 | 名称 | 作用 |
0x06 | 写使能 | 写使能指令将状态寄存器中的WEL位设置为1 |
0x05 | 读SR1 | 读取状态寄存器指令允许读取8位状态寄存器的值 |
0x03 | 读数据 | 读取数据指令允许从存储器顺序读取一个或多个数据字节 |
0x02 | 页写 | 页写指令允许在指定地址写入小于256字节的指定长度的数据,在非0xFF处写入的数据会失败 |
0x20 | 扇区擦除 | 扇区擦除指令将指定扇区(4K字节)内的所有数据都擦除为0xFF。 |
0xC7 | 芯片擦除 | 芯片擦除指令将W25Q128的所有数据都擦除为0xFF。 |
0x90 | 读取芯片ID | 读取制造商/设备ID指令。 |
写使能(0x06)
写使能指令将状态寄存器中的WEL位设置为1。
必须在每个页写、扇区擦除、块擦除、芯片擦除和写状态寄存器指令之前进行写使能。
操作:拉低CS片选->发送指令0x06 ->拉高CS片选
读SR1(0x05)
读取状态寄存器指令允许读取8位状态寄存器的值。
操作:拉低CS片选 ->发送指令0x05 ->定义一个uint8_t数据接收SR1的返回值 ->拉高CS片选
读数据(0x03)
读取数据指令允许从存储器顺序读取一个或多个数据字节。
操作:拉低CS片选 -> 发送指令0x03 -> 发送24位地址 -> 读取数据 -> 拉高CS片选
页写(0x02)
页写指令允许在指定地址写入小于256字节的指定长度的数据,在非0xFF处写入的数据会失败。
操作:写使能 -> 拉低CS片选 -> 发送指令0x02 -> 发送24位地址 -> 写入数据 -> 拉高CS片选 -> 等待写入结束(即判断状态寄存器的BUSY位是否置0)
扇区擦除(0x20)
扇区擦除指令将指定扇区(4K字节)内的所有数据都擦除为0xFF。
操作:写使能 -> 等待空闲(即判断状态寄存器的BUSY位是否置0) -> 拉低CS片选 -> 发送指令0x20 -> 发送24位地址 -> 拉高CS片选 -> 等待扇区擦除完成(即判断状态寄存器的BUSY位是否置0)
芯片擦除(0xC7)
芯片擦除指令将W25Q128的所有数据都擦除为0xFF。
操作:写使能 -> 等待空闲(即判断状态寄存器的BUSY位是否置0) -> 拉低CS片选 -> 发送指令0xC7 -> 拉高CS片选 -> 等待芯片擦除完成(即判断状态寄存器的BUSY位是否置0)
读取W25Q128的芯片ID(0x90)
读取制造商/设备ID指令。
操作:拉低片选信号 -> 发送24位地址,地址为0xFFFFFF -> 定义一个uint16_t数据接收芯片ID -> 拉高片选信号
SPI实验(使用SPI通讯读写W25Q128模块)
STM32的hal库关于SPI的函数
HAL_SPI_TransmitReceive()
通过SPI以阻塞模式发送和接收数据。
原型:
HAL_StatusTypeDef HAL_SPI_TransmitReceive(SPI_HandleTypeDef *hspi, uint8_t *pTxData, uint8_t *pRxData, uint16_t Size,uint32_t Timeout)
参数:
SPI_HandleTypeDef *hspi:SPI句柄
uint8_t *pTxData:发送的数据地址
uint8_t *pRxData:接收的数据地址
uint16_t Size:发送和接收的数据数量
uint32_t Timeout:超时时间,超过这个时间不再发送和接收
实例:
uint8_t spi1_read_write_byte(uint8_t data)
{
uint8_t rec_data = 0;
HAL_SPI_TransmitReceive(&hspi1, &data, &rec_data, 1, 1000);
return rec_data;
}
W25Q128与STM32F103C8T6板子接线
在STM32F103C8T6的产品手册中找到板子上的SPI1的接口,
PA4作为SPI1的NSS,PA5作为SPI1的CLK,PA6作为SPI1的DO(MISO),PA7作为SPI1的DI(MOSI)。

3.3V <-> VCC
GND <-> GND
PA4 <-> CS
PA5 <-> CLK
PA6 <-> DO(MISO)
PA7 <-> DI(MOSI)
STM32CubeMX相关配置
配置SYS

配置RCC
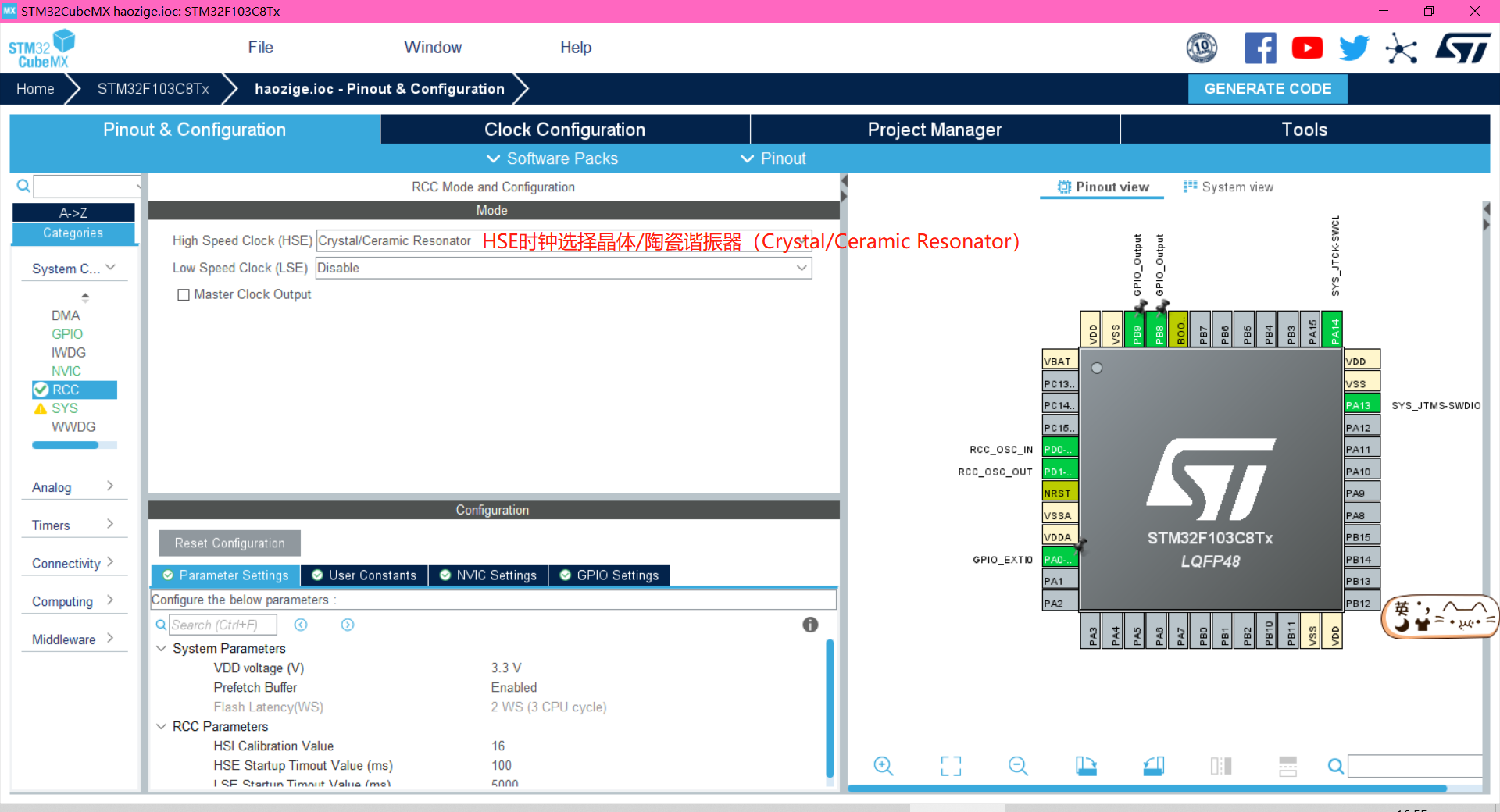

配置GPIO
配置PA4为输出高电平,用来作为SPI主机的片选信号线(CS)。

配置串口信息(UART1)

配置SPI
LSB:全称为Least Significant Bit,在二进制数中意为最低有效位,一般来说,MSB位于二进制数的最左侧,LSB位于二进制数的最右侧。
MSB:全称为Most Significant Bit,在二进制数中属于最高有效位,MSB是最高加权位,与十进制数字中最左边的一位类似。


配置工程名称、工程路径

选择固件库

生成工程

使用MicroLIB库

main.c文件编写
/* USER CODE BEGIN Header */
/********************************************************************************* @file : main.c* @brief : Main program body******************************************************************************* @attention** Copyright (c) 2023 STMicroelectronics.* All rights reserved.** This software is licensed under terms that can be found in the LICENSE file* in the root directory of this software component.* If no LICENSE file comes with this software, it is provided AS-IS.********************************************************************************/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "spi.h"
#include "usart.h"
#include "gpio.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */#include "stdio.h"
#include "string.h"
#include "w25q128.h"/* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD *//* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */#define TEXT_SIZE 16
#define FLASH_WriteAddress 0x000000 //数据写入w25q128的地址,地址范围为0x000000 ~ 0xFFFFFF
#define FLASH_ReadAddress FLASH_WriteAddress/* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*//* USER CODE BEGIN PV *//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP *//* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 *///重写stdio.h文件中的prinft()里的fputc()函数
int fputc(int my_data,FILE *p)
{unsigned char temp = my_data;//改写后,使用printf()函数会将数据通过串口一发送出去HAL_UART_Transmit(&huart1,&temp,1,0xffff); //0xfffff为最大超时时间return my_data;
}/* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 */uint8_t datatemp[TEXT_SIZE];/* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_USART1_UART_Init();MX_SPI1_Init();/* USER CODE BEGIN 2 *//* w25q128初始化 */w25q128_init();/* 写入测试数据 */sprintf((char *)datatemp, "hello jiangxiao");w25q128_write(datatemp, FLASH_WriteAddress, TEXT_SIZE);printf("数据写入完成!\r\n");/* 读出测试数据 */memset(datatemp, 0, TEXT_SIZE);w25q128_read(datatemp, FLASH_ReadAddress, TEXT_SIZE);printf("读出数据:%s\r\n", datatemp);/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){/* USER CODE END WHILE *//* USER CODE BEGIN 3 */}/* USER CODE END 3 */
}/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;RCC_OscInitStruct.HSEState = RCC_HSE_ON;RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;RCC_OscInitStruct.HSIState = RCC_HSI_ON;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK){Error_Handler();}
}/* USER CODE BEGIN 4 *//* USER CODE END 4 *//*** @brief This function is executed in case of error occurrence.* @retval None*/
void Error_Handler(void)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state */__disable_irq();while (1){}/* USER CODE END Error_Handler_Debug */
}#ifdef USE_FULL_ASSERT
/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t *file, uint32_t line)
{/* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
w25q128.c文件编写
向工程添加w25q128.c文件。
#include "w25q128.h"
#include "spi.h"
#include "stdio.h"//w25q128初始化
void w25q128_init(void)
{uint16_t flash_type;spi1_read_write_byte(0xFF); /* 清除DR(数据寄存器),写入一个0xFF */W25Q128_CS(1); //拉高片选信号不进行SPI通信flash_type = w25q128_read_id(); /* 读取FLASH ID. */if (flash_type == W25Q128){printf("检测到W25Q128芯片\r\n");}
}//等待W25Q128空闲
static void w25q128_wait_busy(void)
{while ((w25q128_rd_sr1() & 0x01) == 1); /* 等待状态寄存器的BUSY位清空 */
}//读取状态寄存器的值
uint8_t w25q128_rd_sr1(void)
{uint8_t rec_data = 0;W25Q128_CS(0);spi1_read_write_byte(FLASH_ReadStatusReg1); // 写入指令0x05:读状态寄存器1rec_data = spi1_read_write_byte(0xFF); //获取状态寄存器1的值W25Q128_CS(1);return rec_data;
}//W25Q128写使能,即置位WEL为1
void w25q128_write_enable(void)
{W25Q128_CS(0);spi1_read_write_byte(FLASH_WriteEnable); /* 发送指令0x06:写使能 */W25Q128_CS(1);
}//发送24位地址
static void w25q128_send_address(uint32_t address) /*address:地址范围0~16777215字节,即寻址范围为0x00 ~ 0xFFFFFF */
{spi1_read_write_byte((uint8_t)((address)>>16)); /* 发送 bit23 ~ bit16 地址 */spi1_read_write_byte((uint8_t)((address)>>8)); /* 发送 bit15 ~ bit8 地址 */spi1_read_write_byte((uint8_t)address); /* 发送 bit7 ~ bit0 地址 */
}//擦除整个芯片
void w25q128_erase_chip(void)
{w25q128_write_enable(); /* 写使能 */w25q128_wait_busy(); /* 等待空闲 */W25Q128_CS(0);spi1_read_write_byte(FLASH_ChipErase); /* 发送指令0xC7:擦除整个芯片 */ W25Q128_CS(1);w25q128_wait_busy(); /* 等待芯片擦除结束 */
}//擦除一个扇区
void w25q128_erase_sector(uint32_t saddr) /* saddr:该参数是第几个扇区 */
{saddr *= 4096; /* 一个扇区大小为4096字节 */w25q128_write_enable(); /* 写使能 */w25q128_wait_busy(); /* 等待空闲 */W25Q128_CS(0);spi1_read_write_byte(FLASH_SectorErase); /* 发送指令0x20:擦除指定扇区 */w25q128_send_address(saddr); /* 发送擦除的扇区地址 */W25Q128_CS(1);w25q128_wait_busy(); /* 等待扇区擦除完成 */
}//读取w25q128芯片ID
uint16_t w25q128_read_id(void)
{uint16_t deviceid;W25Q128_CS(0); //拉低片选信号进行SPI通信spi1_read_write_byte(FLASH_ManufactDeviceID); /* 发送读取 ID 命令 *//* 发送3个0 *//*spi1_read_write_byte(0); spi1_read_write_byte(0);spi1_read_write_byte(0);*/w25q128_send_address(0x000000);deviceid = spi1_read_write_byte(0xFF) << 8; /* 读取高8位字节 */deviceid |= spi1_read_write_byte(0xFF); /* 读取低8位字节 */W25Q128_CS(1);return deviceid;
}/*
读取W25Q128的FLASH,在指定地址开始读取指定长度的数据pubf:需要读取的数据
addr:指定的地址
datalen:指定的数据大小
*/
void w25q128_read(uint8_t *pbuf, uint32_t addr, uint16_t datalen)
{uint16_t i;W25Q128_CS(0);spi1_read_write_byte(FLASH_ReadData); /* 发送指令0x03:读取数据 */w25q128_send_address(addr); /* 发送需要读取的数据地址 */for(i=0;i<datalen;i++){pbuf[i] = spi1_read_write_byte(0XFF); /* 循环读取 */}W25Q128_CS(1);
}/*
单页写,在指定地址写入小于256字节的指定长度的数据,在非0xFF处写入的数据会失败pubf:需要写入的数据
addr:指定的地址
datalen:指定的数据大小
*/
static void w25q128_write_page(uint8_t *pbuf, uint32_t addr, uint16_t datalen)
{uint16_t i;w25q128_write_enable(); /* 写使能 */W25Q128_CS(0);spi1_read_write_byte(FLASH_PageProgram); /* 发送命令0x02:页写 */w25q128_send_address(addr); /* 发送写入的页地址 */for(i=0;i<datalen;i++){spi1_read_write_byte(pbuf[i]); /* 循环写入 */}W25Q128_CS(1);w25q128_wait_busy(); /* 等待写入结束 */
}/*
多页写,在指定地址写入指定长度的数据,在非0xFF处写入的数据会失败pubf:需要写入的数据
addr:指定的地址
datalen:指定的数据大小
*/
static void w25q128_write_nocheck(uint8_t *pbuf, uint32_t addr, uint16_t datalen)
{uint16_t pageremain;pageremain = 256 - addr % 256; /* 获取指定地址那页的剩余字节数 */if (datalen <= pageremain) /* 指定地址那页的剩余字节数能装下指定数据大小 */{pageremain = datalen; }while (1){ /* 当指定地址那页的剩余字节数能装下指定数据大小时,一次性写完 *//* 当指定数据大小比指定地址那页的剩余字节数要大时, 先写完指定地址那页的剩余字节, 然后根据剩余数据大小进行不同处理 */w25q128_write_page(pbuf, addr, pageremain); //页写if (datalen == pageremain) /* 写入结束了 */{break; }else /* datalen > pageremain */{pbuf += pageremain; /* pbuf指针地址偏移,前面已经写了pageremain字节 */addr += pageremain; /* 写地址偏移,前面已经写了pageremain字节 */datalen -= pageremain; /* 写入总长度减去已经写入了的字节数 */if (datalen > 256) /* 剩余数据大小还大于一页 */{pageremain= 256; /* 一次写入256个字节,即一次写一页 */}else /* 剩余数据大小小于一页 */{pageremain= datalen; /* 一次性写完 */}}}
}/*
//写入W25Q128的FLASH,在指定地址开写入取指定长度的数据pubf:需要写入的数据
addr:指定的地址
datalen:指定的数据大小
*/
uint8_t g_w25q128_buf[4096]; /* 扇区缓存 */void w25q128_write(uint8_t *pbuf, uint32_t addr, uint16_t datalen)
{uint32_t secpos;uint16_t secoff;uint16_t secremain;uint16_t i;uint8_t *w25q128_buf;w25q128_buf = g_w25q128_buf;secpos = addr / 4096; /* 获取指定地址在哪片扇区 */secoff = addr % 4096; /* 指定数据在在扇区内的偏移数据大小 */secremain = 4096 - secoff; /* 扇区剩余字节数 */if (datalen <= secremain) /* 指定地址那片扇区的剩余字节数能装下指定数据大小 */{secremain = datalen; }while (1){w25q128_read(w25q128_buf, secpos * 4096, 4096); /* 读出指定地址那片扇区的全部内容 */for (i = 0; i < secremain; i++) /* 校验数据,防止数据出现非0xFF */{if (w25q128_buf[secoff + i] != 0xFF) //扇区数据有一个数据不是0xFF{break; /* 需要擦除, 直接退出for循环 */}}if (i < secremain) /* 需要擦除 */{w25q128_erase_sector(secpos); /* 擦除这个扇区 */for (i = 0; i < secremain; i++) /* 复制 */{w25q128_buf[i + secoff] = pbuf[i];}w25q128_write_nocheck(w25q128_buf, secpos * 4096, 4096); /* 写入整个扇区 */}else /* 写已经擦除了的,直接写入扇区剩余区间. */{w25q128_write_nocheck(pbuf, addr, secremain); /* 直接写扇区 */}if (datalen == secremain){break; /* 写入结束了 */}else /* 写入未结束 */{secpos++; /* 扇区地址增1,新的一个扇区 */secoff = 0; /* 偏移位置为0 */pbuf += secremain; /* 指针偏移 */addr += secremain; /* 写地址偏移 */datalen -= secremain; /* 字节数递减 */if (datalen > 4096){secremain = 4096; /* 一次写入一个扇区 */}else{secremain = datalen;/* 一次性写完 */}}}
}w25q128.h文件编写
向工程添加w25q128.h文件。
#include "stdint.h"/* W25Q128片选引脚定义 */
#define W25Q128_CS_GPIO_PORT GPIOA
#define W25Q128_CS_GPIO_PIN GPIO_PIN_4/* W25Q128片选信号 */
#define W25Q128_CS(x) do{ x ? \HAL_GPIO_WritePin(W25Q128_CS_GPIO_PORT, W25Q128_CS_GPIO_PIN, GPIO_PIN_SET) : \HAL_GPIO_WritePin(W25Q128_CS_GPIO_PORT, W25Q128_CS_GPIO_PIN, GPIO_PIN_RESET); \}while(0)/* FLASH芯片列表 */
#define W25Q128 0XEF17 /* W25Q128 芯片ID *//* 指令表 */
#define FLASH_WriteEnable 0x06
#define FLASH_ReadStatusReg1 0x05
#define FLASH_ReadData 0x03
#define FLASH_PageProgram 0x02
#define FLASH_SectorErase 0x20
#define FLASH_ChipErase 0xC7
#define FLASH_ManufactDeviceID 0x90 /* 静态函数 */
static void w25q128_wait_busy(void); //等待W25Q128空闲
static void w25q128_send_address(uint32_t address); //发送24位地址
static void w25q128_write_page(uint8_t *pbuf, uint32_t addr, uint16_t datalen); //单页写,在指定地址写入小于256字节的指定长度的数据,在非0xFF处写入的数据会失败
static void w25q128_write_nocheck(uint8_t *pbuf, uint32_t addr, uint16_t datalen); //多页写,在指定地址写入指定长度的数据,在非0xFF处写入的数据会失败/* 普通函数 */
void w25q128_init(void); //w25q128初始化
uint16_t w25q128_read_id(void); //读取w25q128芯片ID
void w25q128_write_enable(void); //W25Q128写使能,即置位WEL为1
uint8_t w25q128_rd_sr1(void); //读取状态寄存器的值 void w25q128_erase_chip(void); //擦除整个芯片
void w25q128_erase_sector(uint32_t saddr); //擦除一个扇区
void w25q128_read(uint8_t *pbuf, uint32_t addr, uint16_t datalen); //读取W25Q128的FLASH,在指定地址开始读取指定长度的数据
void w25q128_write(uint8_t *pbuf, uint32_t addr, uint16_t datalen); //写入W25Q128的FLASH,在指定地址开写入取指定长度的数据spi.c文件编写
/* USER CODE BEGIN Header */
/********************************************************************************* @file spi.c* @brief This file provides code for the configuration* of the SPI instances.******************************************************************************* @attention** Copyright (c) 2023 STMicroelectronics.* All rights reserved.** This software is licensed under terms that can be found in the LICENSE file* in the root directory of this software component.* If no LICENSE file comes with this software, it is provided AS-IS.********************************************************************************/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "spi.h"/* USER CODE BEGIN 0 *//* USER CODE END 0 */SPI_HandleTypeDef hspi1;/* SPI1 init function */
void MX_SPI1_Init(void)
{/* USER CODE BEGIN SPI1_Init 0 *//* USER CODE END SPI1_Init 0 *//* USER CODE BEGIN SPI1_Init 1 *//* USER CODE END SPI1_Init 1 */hspi1.Instance = SPI1;hspi1.Init.Mode = SPI_MODE_MASTER;hspi1.Init.Direction = SPI_DIRECTION_2LINES;hspi1.Init.DataSize = SPI_DATASIZE_8BIT;hspi1.Init.CLKPolarity = SPI_POLARITY_LOW;hspi1.Init.CLKPhase = SPI_PHASE_1EDGE;hspi1.Init.NSS = SPI_NSS_SOFT;hspi1.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_256;hspi1.Init.FirstBit = SPI_FIRSTBIT_MSB;hspi1.Init.TIMode = SPI_TIMODE_DISABLE;hspi1.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;hspi1.Init.CRCPolynomial = 10;if (HAL_SPI_Init(&hspi1) != HAL_OK){Error_Handler();}/* USER CODE BEGIN SPI1_Init 2 *//* USER CODE END SPI1_Init 2 */}void HAL_SPI_MspInit(SPI_HandleTypeDef* spiHandle)
{GPIO_InitTypeDef GPIO_InitStruct = {0};if(spiHandle->Instance==SPI1){/* USER CODE BEGIN SPI1_MspInit 0 *//* USER CODE END SPI1_MspInit 0 *//* SPI1 clock enable */__HAL_RCC_SPI1_CLK_ENABLE();__HAL_RCC_GPIOA_CLK_ENABLE();/**SPI1 GPIO ConfigurationPA5 ------> SPI1_SCKPA6 ------> SPI1_MISOPA7 ------> SPI1_MOSI*/GPIO_InitStruct.Pin = GPIO_PIN_5|GPIO_PIN_7;GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);GPIO_InitStruct.Pin = GPIO_PIN_6;GPIO_InitStruct.Mode = GPIO_MODE_INPUT;GPIO_InitStruct.Pull = GPIO_NOPULL;HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);/* USER CODE BEGIN SPI1_MspInit 1 *//* USER CODE END SPI1_MspInit 1 */}
}void HAL_SPI_MspDeInit(SPI_HandleTypeDef* spiHandle)
{if(spiHandle->Instance==SPI1){/* USER CODE BEGIN SPI1_MspDeInit 0 *//* USER CODE END SPI1_MspDeInit 0 *//* Peripheral clock disable */__HAL_RCC_SPI1_CLK_DISABLE();/**SPI1 GPIO ConfigurationPA5 ------> SPI1_SCKPA6 ------> SPI1_MISOPA7 ------> SPI1_MOSI*/HAL_GPIO_DeInit(GPIOA, GPIO_PIN_5|GPIO_PIN_6|GPIO_PIN_7);/* USER CODE BEGIN SPI1_MspDeInit 1 *//* USER CODE END SPI1_MspDeInit 1 */}
}/* USER CODE BEGIN 1 *//*通过SPI1同时读写一个字节数据
主机只向从机进行写操作,调用此函数时忽略返回值
主机只向从机进行读操作,调用此函数时随便传入一个字符,尽量是0xFF
*/
uint8_t spi1_read_write_byte(uint8_t data)
{uint8_t rec_data = 0;HAL_SPI_TransmitReceive(&hspi1, &data, &rec_data, 1, 1000); //spi读写数据函数,参数2存放用来发送的数据,参数3存放用来接收的数据return rec_data;
}/* USER CODE END 1 */
spi.h文件编写
/* USER CODE BEGIN Header */
/********************************************************************************* @file spi.h* @brief This file contains all the function prototypes for* the spi.c file******************************************************************************* @attention** Copyright (c) 2023 STMicroelectronics.* All rights reserved.** This software is licensed under terms that can be found in the LICENSE file* in the root directory of this software component.* If no LICENSE file comes with this software, it is provided AS-IS.********************************************************************************/
/* USER CODE END Header */
/* Define to prevent recursive inclusion -------------------------------------*/
#ifndef __SPI_H__
#define __SPI_H__#ifdef __cplusplus
extern "C" {
#endif/* Includes ------------------------------------------------------------------*/
#include "main.h"/* USER CODE BEGIN Includes *//* USER CODE END Includes */extern SPI_HandleTypeDef hspi1;/* USER CODE BEGIN Private defines *//* USER CODE END Private defines */void MX_SPI1_Init(void);/* USER CODE BEGIN Prototypes */uint8_t spi1_read_write_byte(uint8_t data);/* USER CODE END Prototypes */#ifdef __cplusplus
}
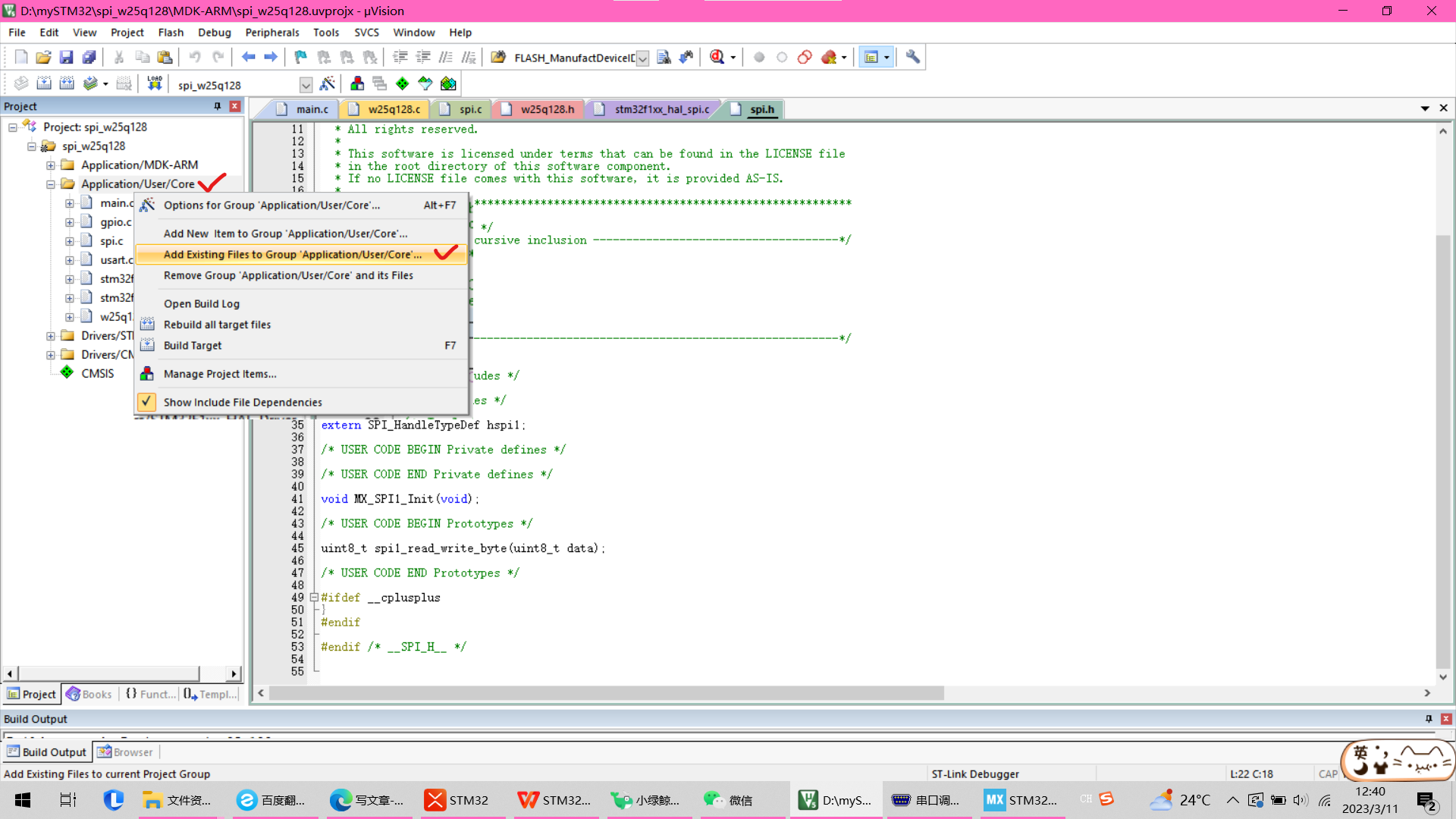
#endif#endif /* __SPI_H__ */向STM32工程添加.c和.h文件
在创建好的STM32工程中找到Core的文件夹

向文件夹里添加新的xxx.c文件或xxx.h文件

在keil5中导入工程后,将这两个文件添加到工程列表中
相关文章:
STM32之SPI
SPISPI介绍SPI是串行外设接口(Serial Peripherallnterface)的缩写,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为PCB的布局上节省空间,提供方便…...

02 深度学习环境搭建
1、查看对应版本关系 详细见:https://blog.csdn.net/qq_41946216/article/details/129476095?spm1001.2014.3001.5501此案例环境使用 CUDA 11.7、Pytouch1.12.1、Miniconda3_py38(含Python3.8) 2. 安装Anaconda 或 Miniconda 本案例重点一为Miniconda准 2.1 安…...

PHP导入大量CSV数据的方法分享
/** * @description 迭代器读取csv文件 * @param $strCsvPath * @return \Generator */ public static function readPathCsvFile($strCsvPath) { if ($handle = fopen($strCsvPath, r)) { while (!feof($handle)) { yield fgetcsv($handle); } …...

代码看不懂?ChatGPT 帮你解释,详细到爆!
偷个懒,用ChatGPT 帮我写段生物信息代码如果 ChatGPT 给出的的代码不太完善,如何请他一步步改好?网上看到一段代码,不知道是什么含义?输入 ChatGPT 帮我们解释下。生信宝典 1: 下面是一段 Linux 代码,请帮…...

【MyBatis】篇三.自定义映射resultMap和动态SQL
MyBatis整理 篇一.MyBatis环境搭建与增删改查 篇二.MyBatis查询与特殊SQL 篇三.自定义映射resultMap和动态SQL 篇四.MyBatis缓存和逆向工程 文章目录1、自定义映射P1:测试数据准备P2:字段和属性的映射关系P3:多对一的映射关系P4:一对多的映射关系2、动态SQL2.1 IF标签2.2 w…...
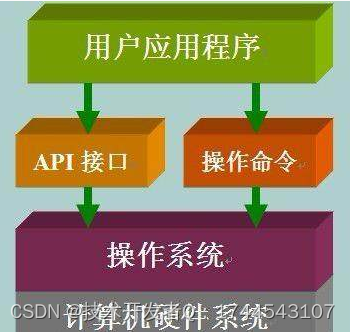
什么是API?(详细解说)
编程资料时经常会看到API这个名词,网上各种高大上的解释估计放倒了一批初学者。初学者看到下面这一段话可能就有点头痛了。 API(Application Programming Interface,应用程序编程接口)是一些预先定义的函数,目的是提供应用程序与开…...
比cat更好用的命令!
大家好,我是良许。 作为程序员,大家一定对 cat 这个命令不陌生。它主要的功能就是用来显示文本文件的具体内容。 但 cat 命令两个很重大的缺陷:1. 不能语法高亮输出;2. 文本太长的话无法翻页输出。正是这两个不足,使…...
MySQL、HBase、ElasticSearch三者对比
1、概念介绍 MySQL:关系型数据库,主要面向OLTP,支持事务,支持二级索引,支持sql,支持主从、Group Replication架构模型(本文全部以Innodb为例,不涉及别的存储引擎)。 HBas…...

Vue+ElementUI+Vuex购物车
最完整最能理解的Vuex版本的购物车购物车是最经典的小案例。Vuex代码:import Vue from vue import Vuex from vuex import $http from ../request/http Vue.use(Vuex)const store new Vuex.Store({state:{shopList:[],},mutations:{setShopCarList(state,payload)…...

Android 录屏 实现
https://lixiaogang03.github.io/2021/11/02/Android-%E5%BD%95%E5%B1%8F/ https://xie.infoq.cn/article/dd40cd5d753c896225063f696 视频地址: https://time.geekbang.org/dailylesson/detail/100056832 概述 在视频会议、线上课堂、游戏直播等场景下&#x…...

【CSAPP】家庭作业2.55~2.76
文章目录2.55*2.56*2.57*2.58**2.59**2.60**位级整数编码规则2.61**2.62***2.63***2.64*2.65****2.66***2.67**2.68**2.69***2.70**2.71*2.72**2.73**2.74**2.75***2.76*2.55* 问:在你能访问的不同的机器上,编译show_bytes.c并运行代码,确定…...

Python操作MySQL数据库详细案例
Python操作MySQL数据库详细案例一、前言二、数据准备三、建立数据库四、处理和上传数据五、下载数据六、完整项目数据和代码一、前言 本文通过案例讲解如何使用Python操作MySQL数据库。具体任务为:假设你已经了解MySQL和知识图谱标注工具Brat,将Brat标注…...
:AXI_CAN的使用)
MicroBlaze系列教程(8):AXI_CAN的使用
文章目录 @[toc]CAN总线概述AXI_CAN简介MicroBlaze硬件配置常用函数使用示例波形实测参考资料工程下载本文是Xilinx MicroBlaze系列教程的第8篇文章。 CAN总线概述 **CAN(Controller Area Network)**是 ISO 国际标准化的串行通信协议,是由德国博世(BOSCH)公司在20世纪80年代…...

网络安全领域中八大类CISP证书
CISP注册信息安全专业人员 注册信息安全专业人员(Certified Information Security Professional),是经中国信息安全产品测评认证中心实施的国家认证,对信息安全人员执业资质的认可。该证书是面向信息安全企业、信息安全咨询服务…...
stm32学习笔记-5EXIT外部中断
5 EXIT外部中断 [toc] 注:笔记主要参考B站 江科大自化协 教学视频“STM32入门教程-2023持续更新中”。 注:工程及代码文件放在了本人的Github仓库。 5.1 STM32中断系统 图5-1 中断及中断嵌套示意图 中断 是指在主程序运行过程中,出现了特定…...

MySQL Workbench 图形化界面工具
Workbench 介绍 MySQL官方提供了一款免费的图形工具——MySQL Workbench,它是一款功能强大且易于使用的数据库设计、管理和开发工具,总之,MySQL Workbench是一款非常好用的MySQL图形工具,可以满足大多数MySQL用户的需求。 目录 W…...
雪花算法(SnowFlake)
简介现在的服务基本是分布式、微服务形式的,而且大数据量也导致分库分表的产生,对于水平分表就需要保证表中 id 的全局唯一性。对于 MySQL 而言,一个表中的主键 id 一般使用自增的方式,但是如果进行水平分表之后,多个表…...

Linux防火墙
一、Linux防火墙Linux的防火墙体系主要在网络层,针对TCP/IP数据包实施过滤和限制,属于典型的包过滤防火墙(或称为网络层防火墙)。Linux系统的防火墙体系基于内核编码实现,具有非常稳定的性能和极高的效率,因…...

网络安全系列-四十七: IP协议号大全
IP协议号列表 这是用在IPv4头部和IPv6头部的下一首部域的IP协议号列表。 十进制十六进制关键字协议引用00x00HOPOPTIPv6逐跳选项RFC 246010x01ICMP互联网控制消息协议(ICMP)RFC 79220x02IGMP...

HTTP协议格式以及Fiddler用法
目录 今日良言:焦虑和恐惧改变不了明天,唯一能做的就是把握今天 一、HTTP协议的基本格式 二、Fiddler的用法 1.Fidder的下载 2.Fidder的使用 今日良言:焦虑和恐惧改变不了明天,唯一能做的就是把握今天 一、HTTP协议的基本格式 先来介绍一下http协议: http 协议(全称为 &q…...

OpenClaw新手教程:Windows下用QwQ-32B搭建第一个自动化流程
OpenClaw新手教程:Windows下用QwQ-32B搭建第一个自动化流程 1. 为什么选择OpenClawQwQ-32B组合 去年我开始研究本地化AI自动化工具时,发现市面上的方案要么需要复杂编程,要么必须上传数据到云端。直到遇见OpenClaw这个能直接在Windows上操控…...
Pixel Dimension Fissioner开发者案例:为内容SaaS平台嵌入像素化文本增强SDK
Pixel Dimension Fissioner开发者案例:为内容SaaS平台嵌入像素化文本增强SDK 1. 项目背景与核心价值 在内容创作领域,文本改写与增强工具已成为提升生产力的关键组件。传统AI工具往往过于功能化,缺乏创意激发和用户体验设计。Pixel Dimensi…...

视频编解码技术入门:从YUV到H.265的实战解析
1. 视频编解码技术的基础概念 当你用手机拍摄一段视频时,系统会经历一系列复杂的处理过程。首先摄像头捕捉到的光信号会转换为电信号,再经过模数转换变成数字信号。这个原始的数字视频数据量非常大,比如一段1080p分辨率、30帧/秒的未压缩视频…...

CBAM注意力机制实战:如何在PyTorch中轻松集成通道与空间注意力模块
CBAM注意力机制实战:PyTorch中通道与空间注意力模块的高效集成指南 在计算机视觉领域,注意力机制已经成为提升卷积神经网络性能的关键技术。CBAM(Convolutional Block Attention Module)通过同时关注"什么特征重要"&…...

GPT4、Claude3和Suno,哪个AI工具做音乐和写歌词更厉害?我的横向测评
GPT-4、Claude 3与Suno:三大AI音乐创作工具深度横评 去年夏天,当我第一次尝试用AI工具为旅行vlog配乐时,面对十几个音乐生成平台彻底陷入选择困难。经过半年实测三大主流工具——擅长文本的GPT-4与Claude 3、专攻音乐的Suno,终于整…...

用PANN模型识别鸟叫声:从环境音中分离特定声音的完整流程
用PANN模型识别鸟叫声:从环境音中分离特定声音的完整流程 清晨的森林录音中,鸟鸣往往与风声、虫鸣、流水声交织在一起。传统的声音识别技术很难从这种复杂环境音中准确分离特定物种的叫声。PANN(Pretrained Audio Neural Networks)模型的出现,…...

如何用AI实现专业级歌声转换?3大核心步骤+5个避坑指南
如何用AI实现专业级歌声转换?3大核心步骤5个避坑指南 【免费下载链接】diff-svc Singing Voice Conversion via diffusion model 项目地址: https://gitcode.com/gh_mirrors/di/diff-svc AI歌声转换技术正逐渐成为音乐创作和音频处理领域的新宠。Diff-SVC作为…...

选错方法后果多严重?参数vs非参数估计的7个真实业务场景对比
参数与非参数估计的7个业务决策陷阱:从AB测试到风控的实战避坑指南 当电商平台的AB测试结果出现矛盾时,你可能不会想到问题出在点击率分析方法的底层假设上。去年某跨境电商大促期间,运营团队发现使用核密度估计(KDE)分…...

电动车终章:最后一页的告别
电驭之尽:所有故事都有最后一页在所有关于电动车的叙事即将收尾之际,在所有出发与归来的循环终于停歇之时,有一个不可回避的事实——所有故事都有最后一页。不是终结,不是消亡,只是翻到了那一页,然后合上。…...

通义千问1.8B轻量模型入门:从部署到对话完整教程
通义千问1.8B轻量模型入门:从部署到对话完整教程 1. 为什么选择通义千问1.8B轻量模型 如果你正在寻找一个能在消费级GPU甚至边缘设备上运行的对话模型,通义千问1.5-1.8B-Chat-GPTQ-Int4绝对值得考虑。这个由阿里云推出的轻量级模型,经过GPT…...