XTDrone-固定翼无人机编队跟踪无人车-配置教程
配置使用ROS版本为Neotic
1 配置
1.1 加载固定翼无人机编队跟踪控制工程文件
cp -r ~/XTDrone/coordination/fixed_wing_formation_control ~/catkin_ws/src1.2 加载一些用到的功能包
sudo apt-get install ros-noetic-serial #根据自己的ROS版本修改
sudo apt-get install libpcap-dev
sudo apt-get install ros-noetic-velocity-controllers
sudo apt-get install ros-noetic-gazebo-msgs1.3 安装一些必要的依赖
cp -r ~/XTDrone/sitl_config/gazebo_ros_pkgs ~/catkin_ws/src #若已在基础配置中完成则忽略此步骤
cp -r ~/XTDrone/sitl_config/ugv/* ~/catkin_ws/src
cp -r ~/XTDrone/sitl_config/gazebo_plugin/velodyne ~/catkin_ws/src1.4 将launch文件装入PX4的launch文件夹中
cd ~/catkin_ws/src/fixed_wing_formation_control/launchfile
cp fixed_wing_formation_control.launch ~/PX4_Firmware/launch1.5 在/catkin_ws/devel/include下创建一个功能包fixed_wing_formation_control,并将/catkin_ws/src/fixed_wing_formation_control/headerfile中的头文件拷贝到创建的fixed_wing_formation_control中。
mkdir -p ~/catkin_ws/devel/include/fixed_wing_formation_control
cd ~/catkin_ws/src/fixed_wing_formation_control/headerfile
cp Formation_control_states.h FWcmd.h Fw_cmd_mode.h Fw_current_mode.h Fwmonitor.h FWstates.h Leaderstates.h ~/catkin_ws/devel/include/fixed_wing_formation_control备注:一定要先执行这个一步之后再编译,否则会出现如下报错:
1.6 编译
cd ~/catkin_ws
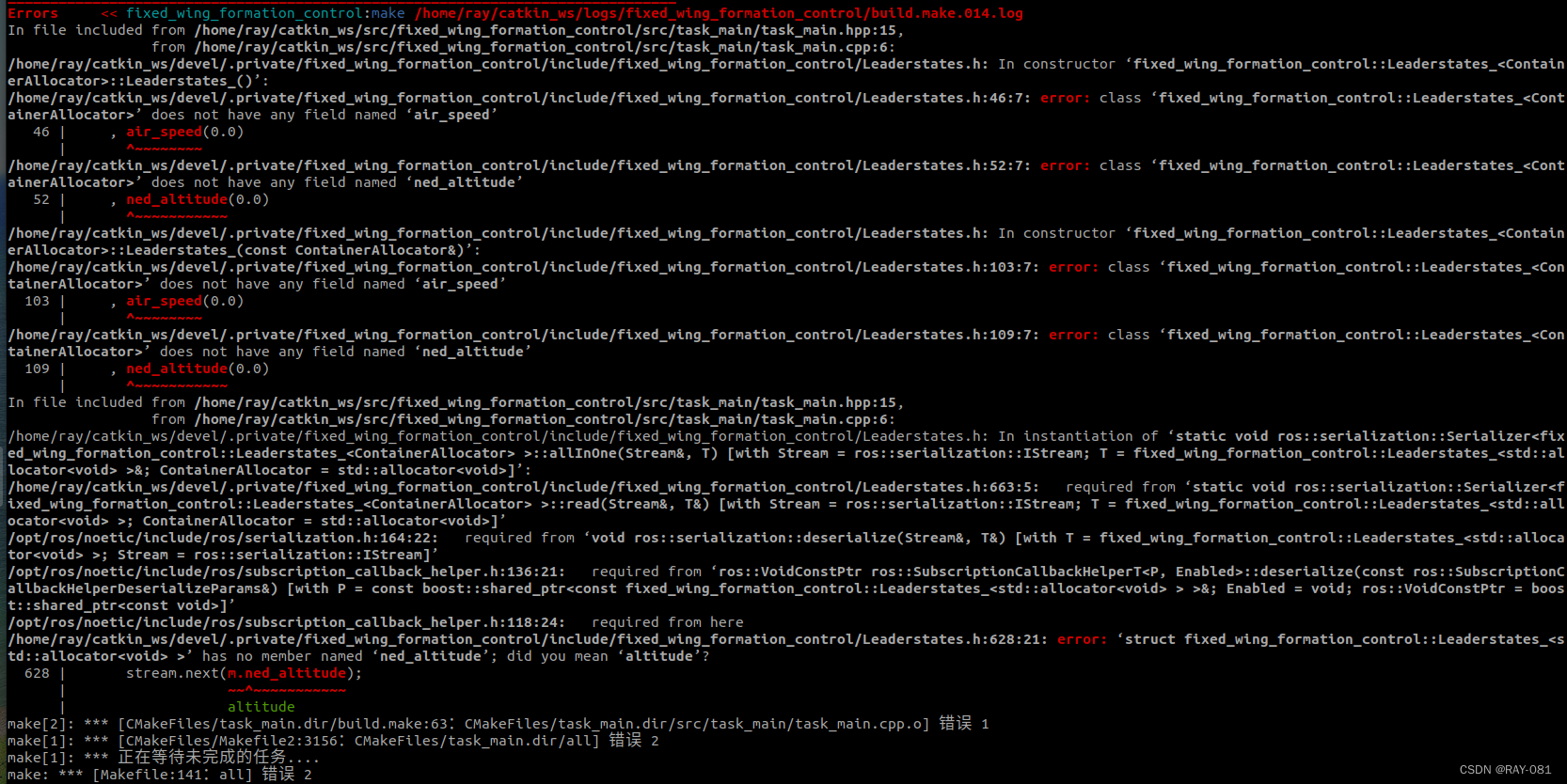
catkin build编译的过程中可能会出现如下报错:

错因分析:task_main.cpp文件中的参数“airspeed“与Leaderstates. msg文件中的参数名不同。
解决方法:
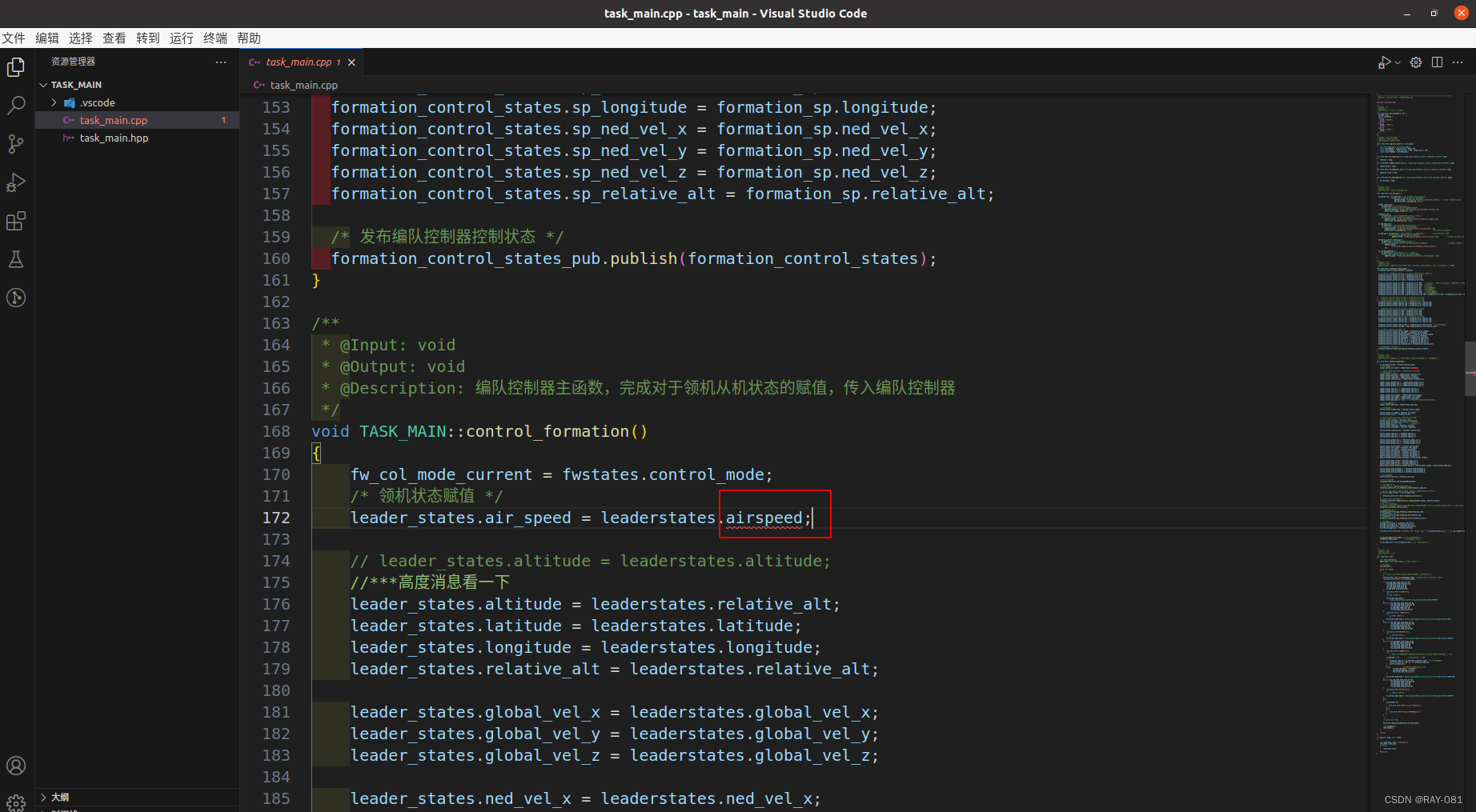
a.打开Leaderstates. msg文件,检查参数名是否为:air_speed,如下图所示。

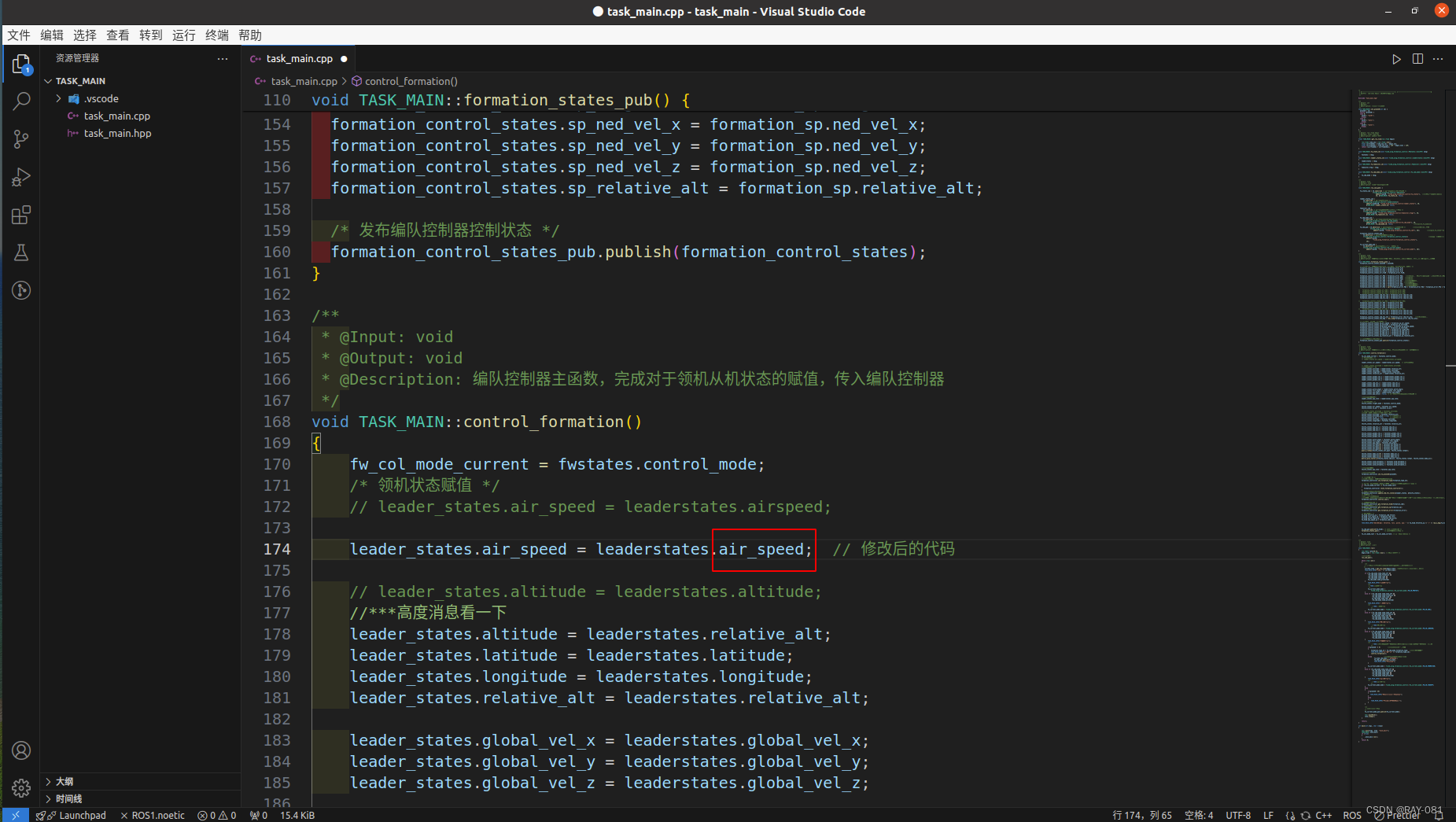
b.打开task_main.cpp文件,将173行的代码中的airspeed修改为air_speed,然后保存,如下面两张图所示。
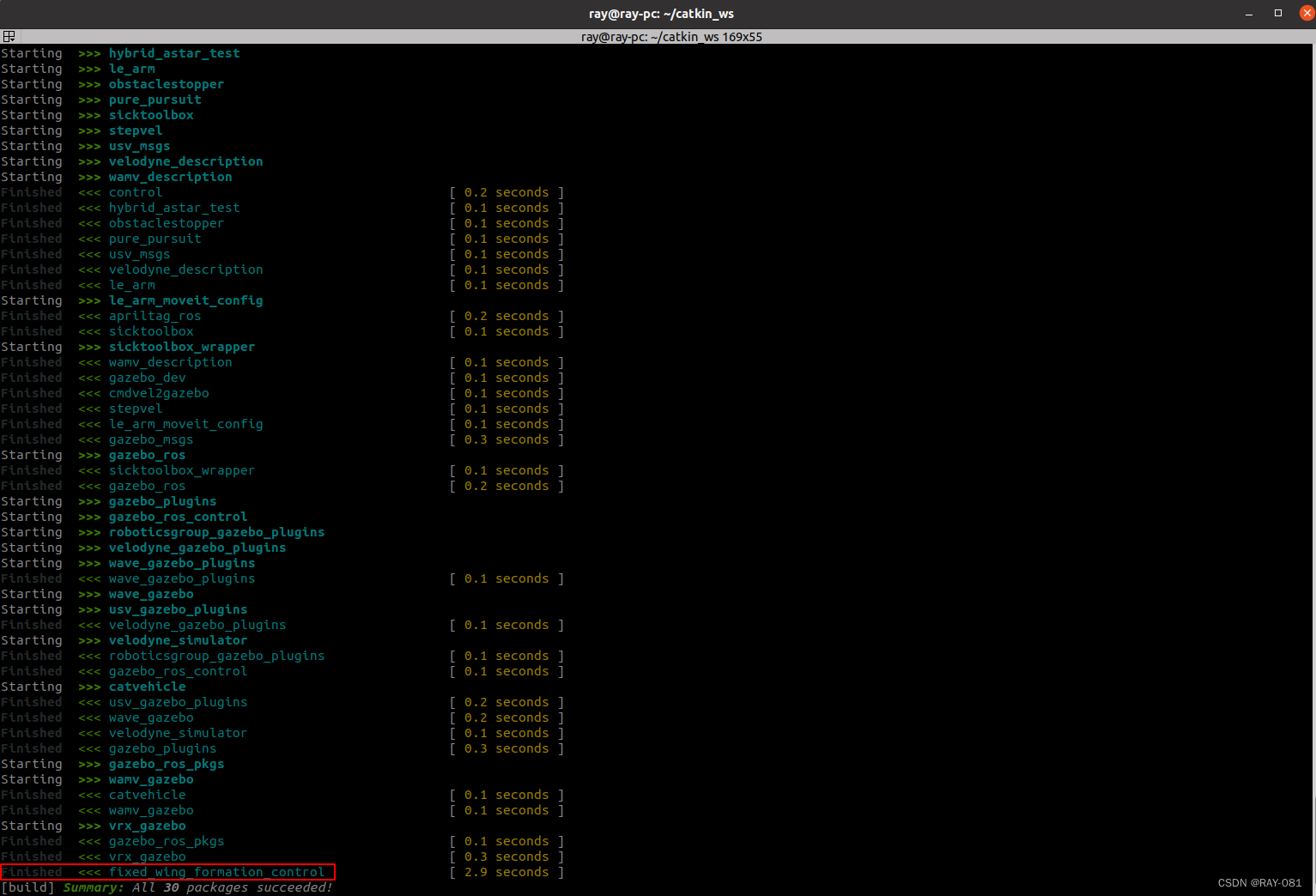
c.修改完成后再次编译
cd ~/catkin_ws
catkin build出现下图所示的情况,则说明编译成功。
2 启动仿真
2.1 借助bash文件一键启动
cd ~/catkin_ws/src/fixed_wing_formation_control/scripts/
bash multi_uav_sim_ba_3vtol.sh这个过程中可能出现如下报错:
2.1.1 报错1:
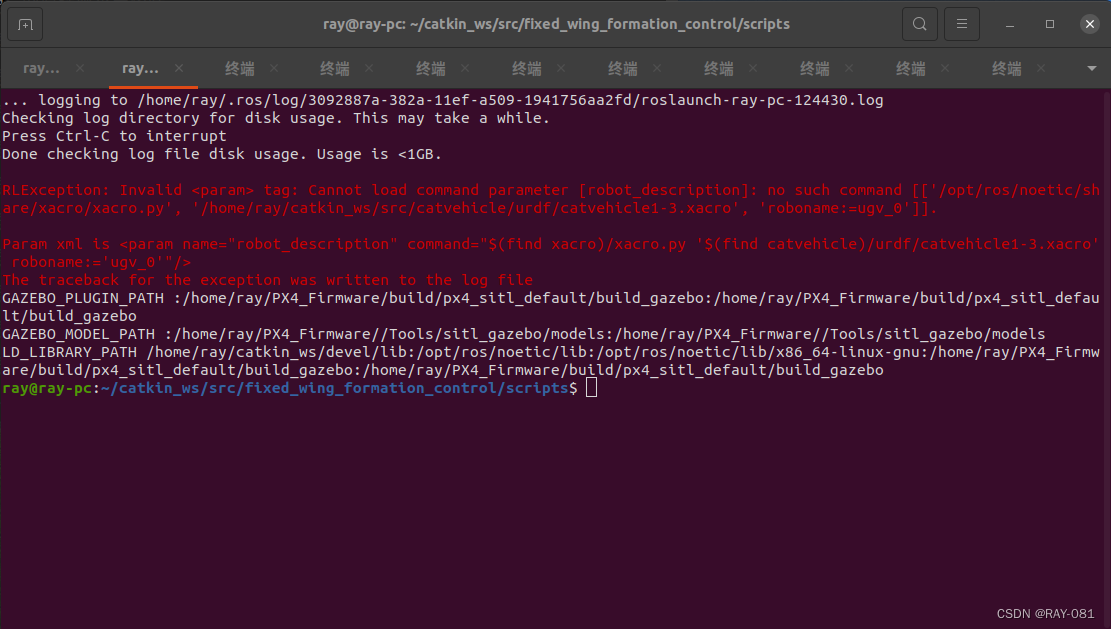
错因分析:
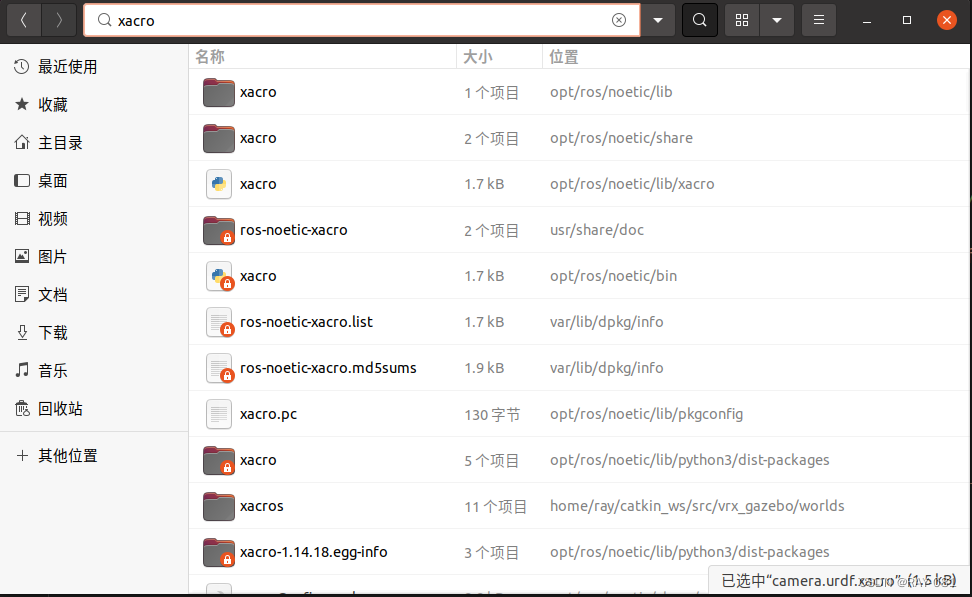
这个问题是由于ROS在Noetic版本中xacro包的路径有所变化导致的。launch文件中尝试使用xacro来生成URDF时,指定的路径不正确。Noetic版本中,xacro命令行工具的路径应该是/opt/ros/noetic/lib/xacro/xacro。
也就是说ROS neotic中/opt/ros/noetic/share/xacro下没有xacro.py 而是在opt/ros/noetic/lib/xacro/xacro中,如下两张图所示。

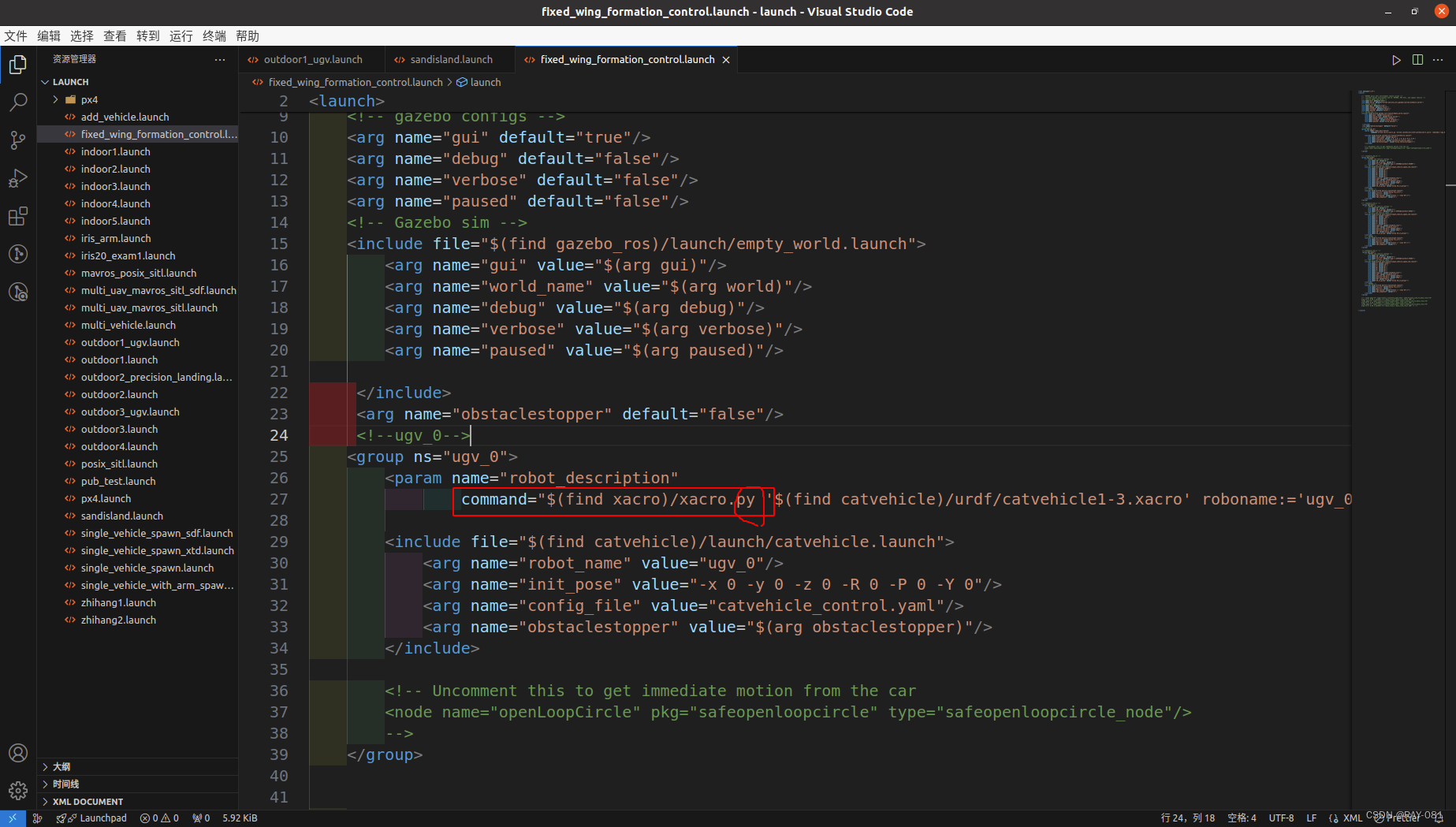
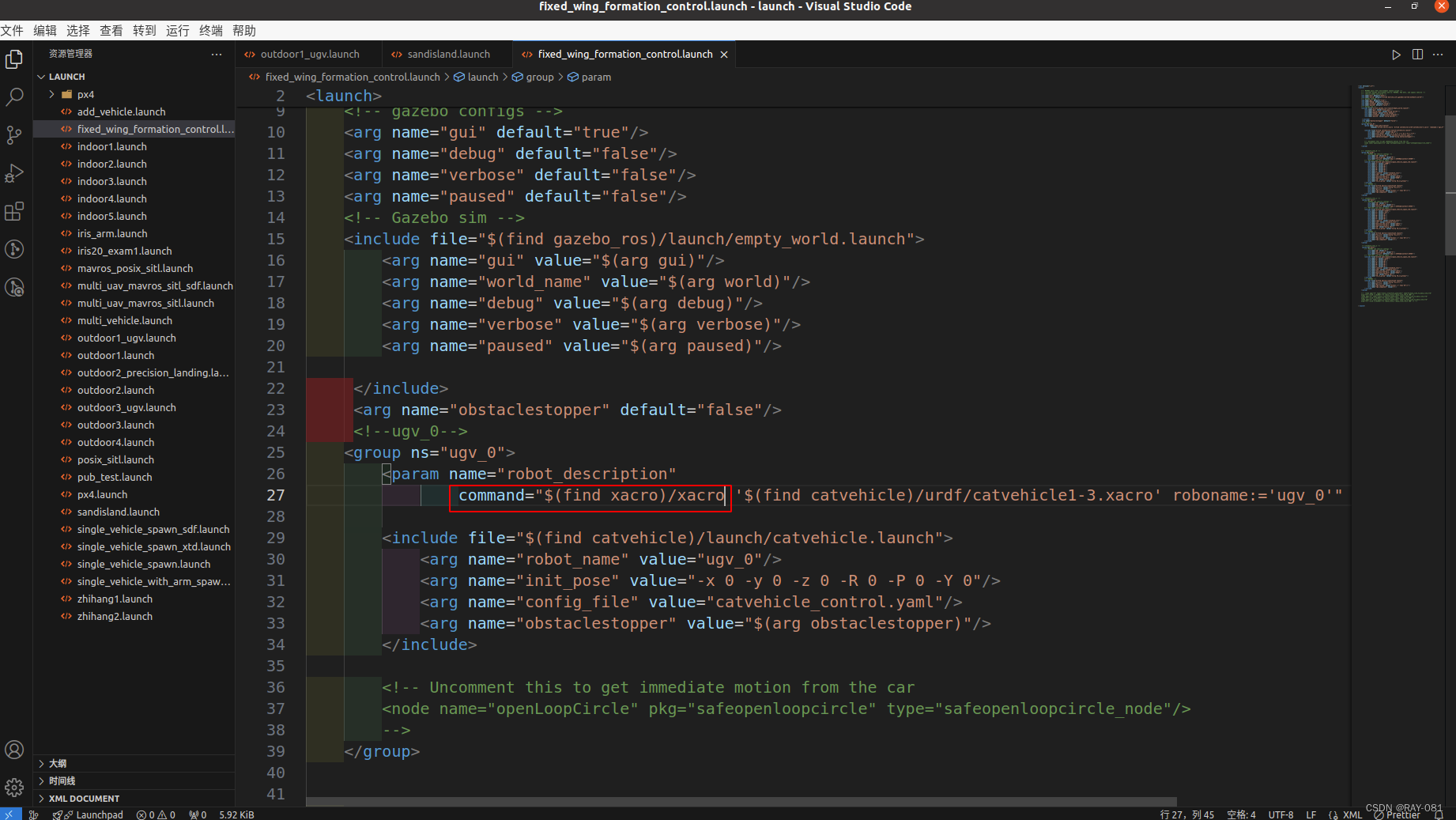
解决方法:
打开fixed_wing_formation_control.launch,将其中的xacro.py中的.py去掉后并保存,具体修改位置如下两图所示。文件路径:/home/ray/PX4_Firmware/launch
2.1.2 报错2
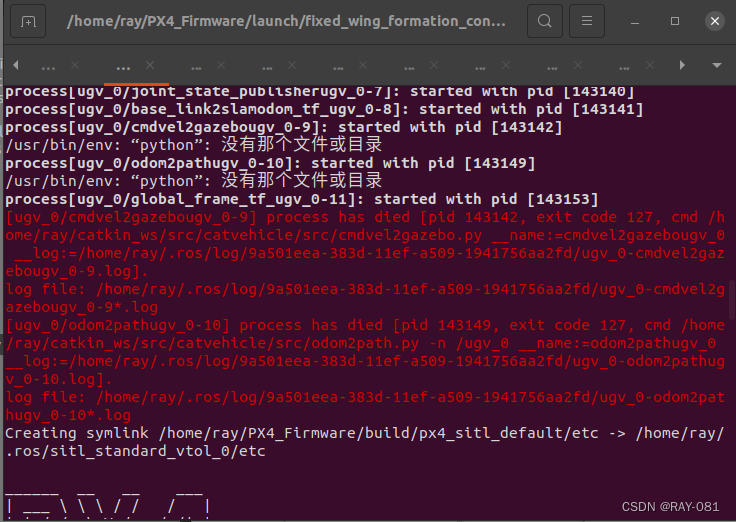
错因分析:#!/usr/bin/env python用的是pyhton2,而neotic用的是python3。
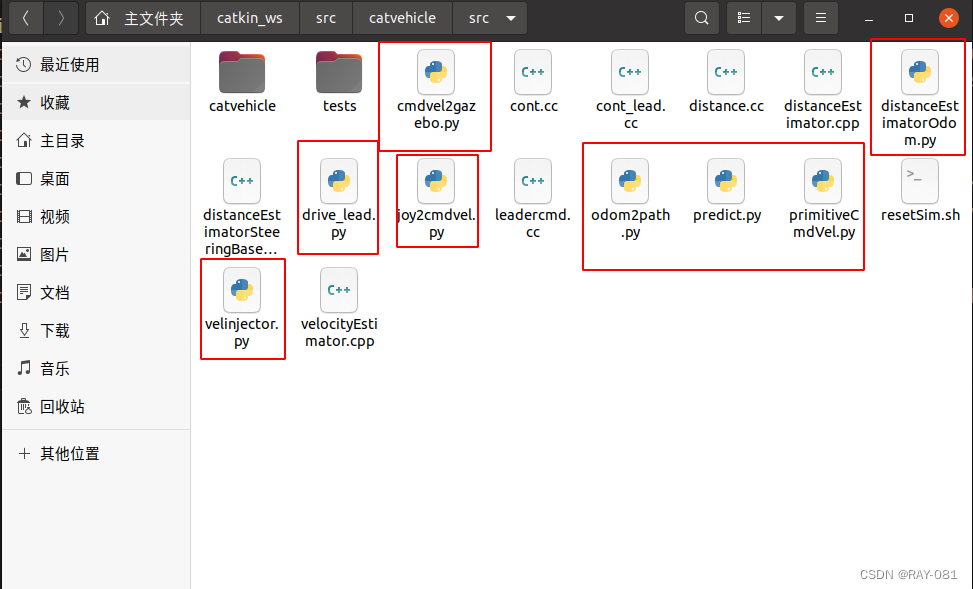
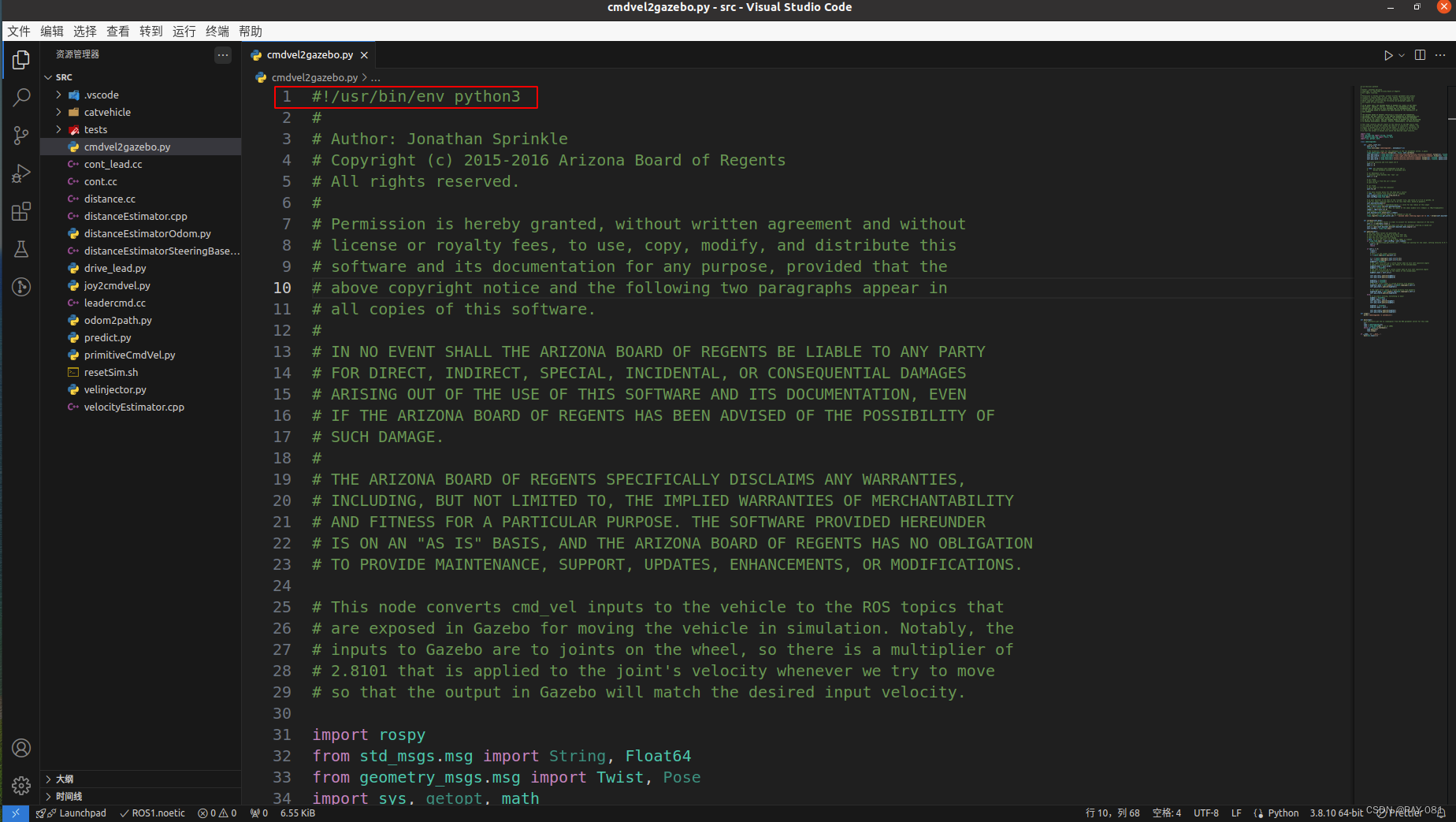
解决办法:将/home/ray/catkin_ws/src/catvehicle/src下的所有py文件中的#!/usr/bin/env python修改为#!/usr/bin/env python3并保存即可。如下列几张图所示。


2.1.3 报错3:
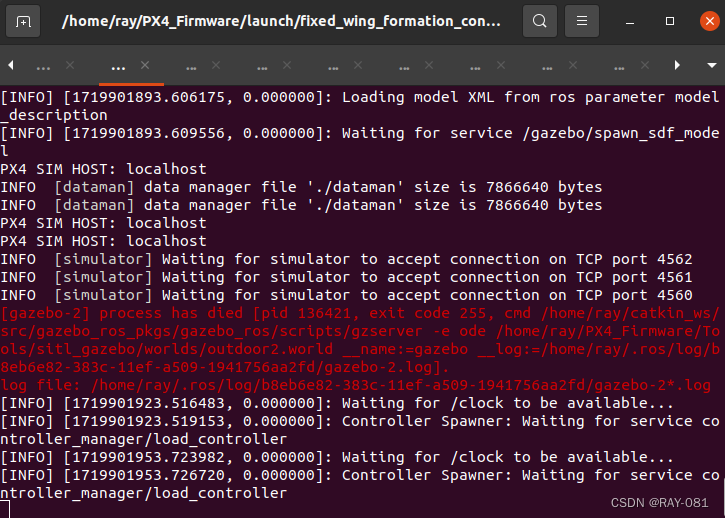
错因分析及解决方法:说明gazebo进程已经被占用,需要输入如下两条命令关闭之前的gazebo进程。
killall gzserver
killall gzclient 2.1.4 再次启动仿真:
cd ~/catkin_ws/src/fixed_wing_formation_control/scripts/
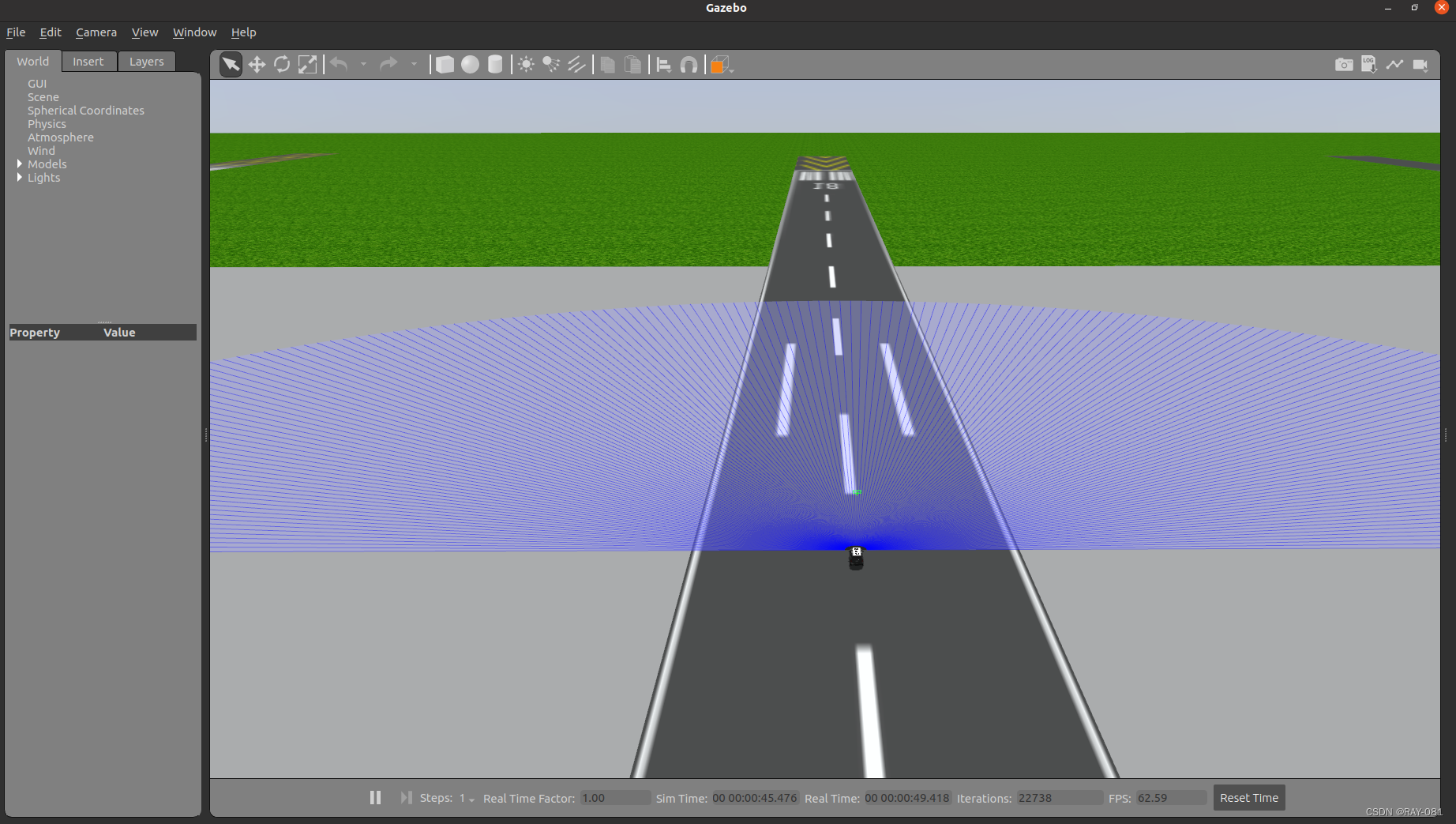
bash multi_uav_sim_ba_3vtol.sh正常启动后的效果如下图所示:
2.2 启动QGC地面站
进入你的QGC地面站的安装位置,然后在该文件在中打开终端,输入以下命令即可打开地面站。
./QGroundControl.AppImage如果进去的界面如下:
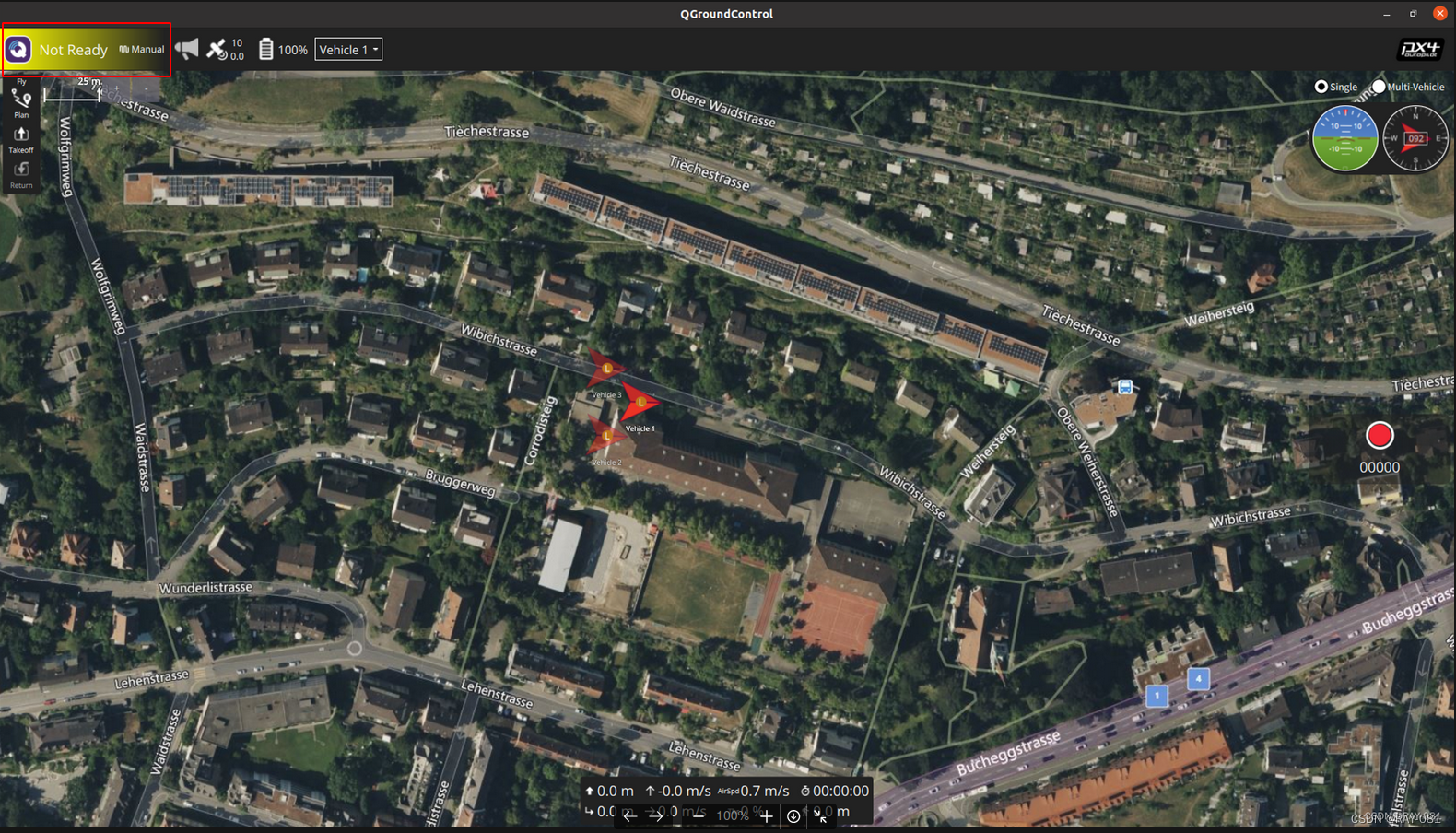
这可有能是你的rcS文件中的参数未正确设置,详见PX4飞控EKF配置 · 语雀 ,检查你的rcS文件的参数是否设置如下:
# GPS usedparam set EKF2_AID_MASK 1# Vision used and GPS denied#param set EKF2_AID_MASK 24# Barometer used for hight measurementparam set EKF2_HGT_MODE 0# Barometer denied and vision used for hight measurement#param set EKF2_HGT_MODE 3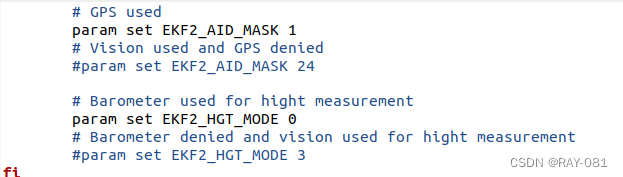
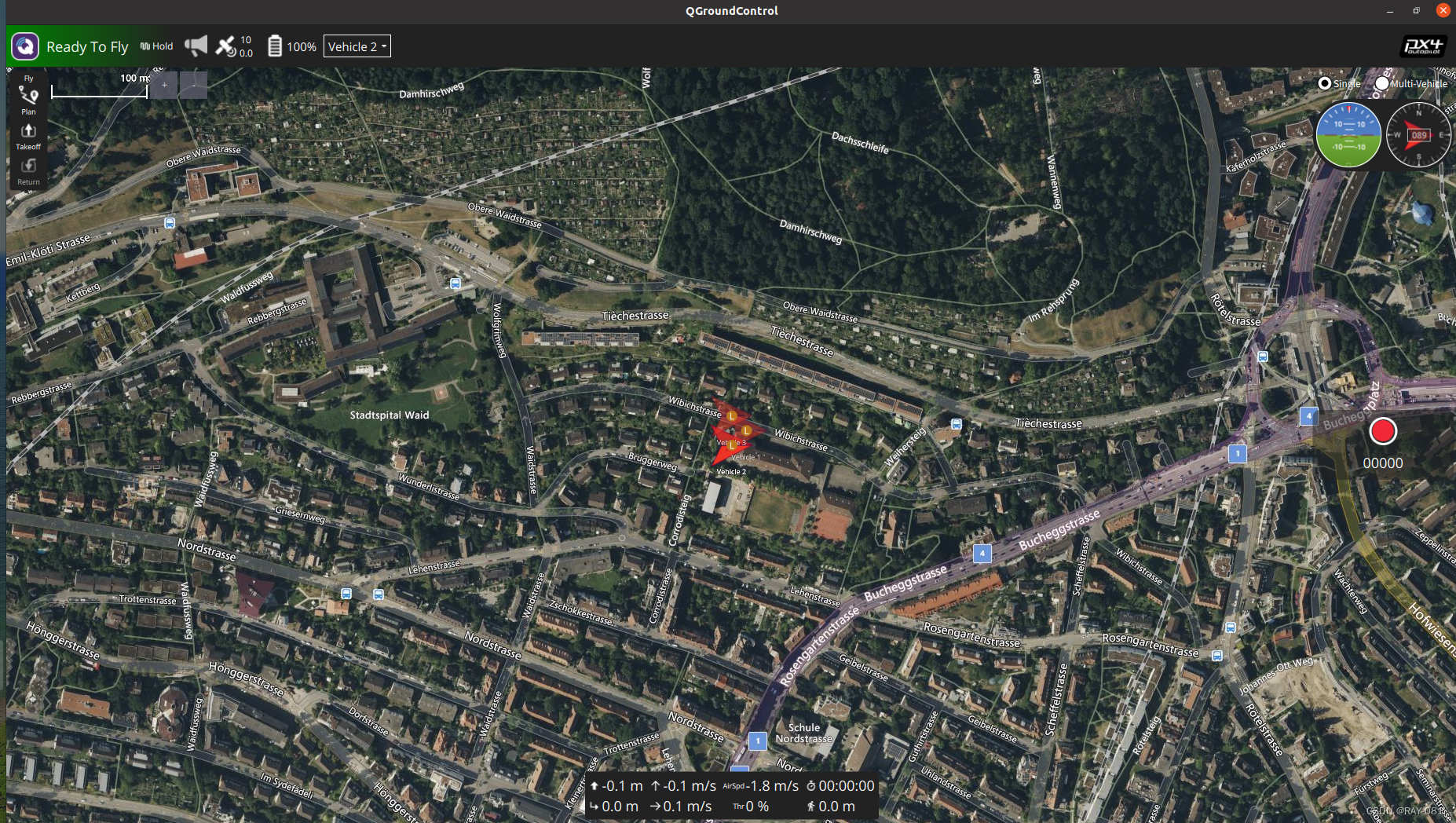
修改并保存后,再次重启gazebo仿真和QGC地面站。
正常打开后的界面如下:
2.3 借助QGC首先在旋翼模式下实现升空
备注:以下的每一步操作,每个无人机都需要进行。
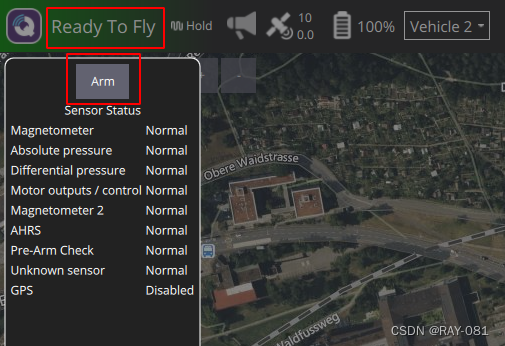
2.3.1 解锁
按照下列顺序的图片中红框位置依次点击或滑动来解锁无人机。
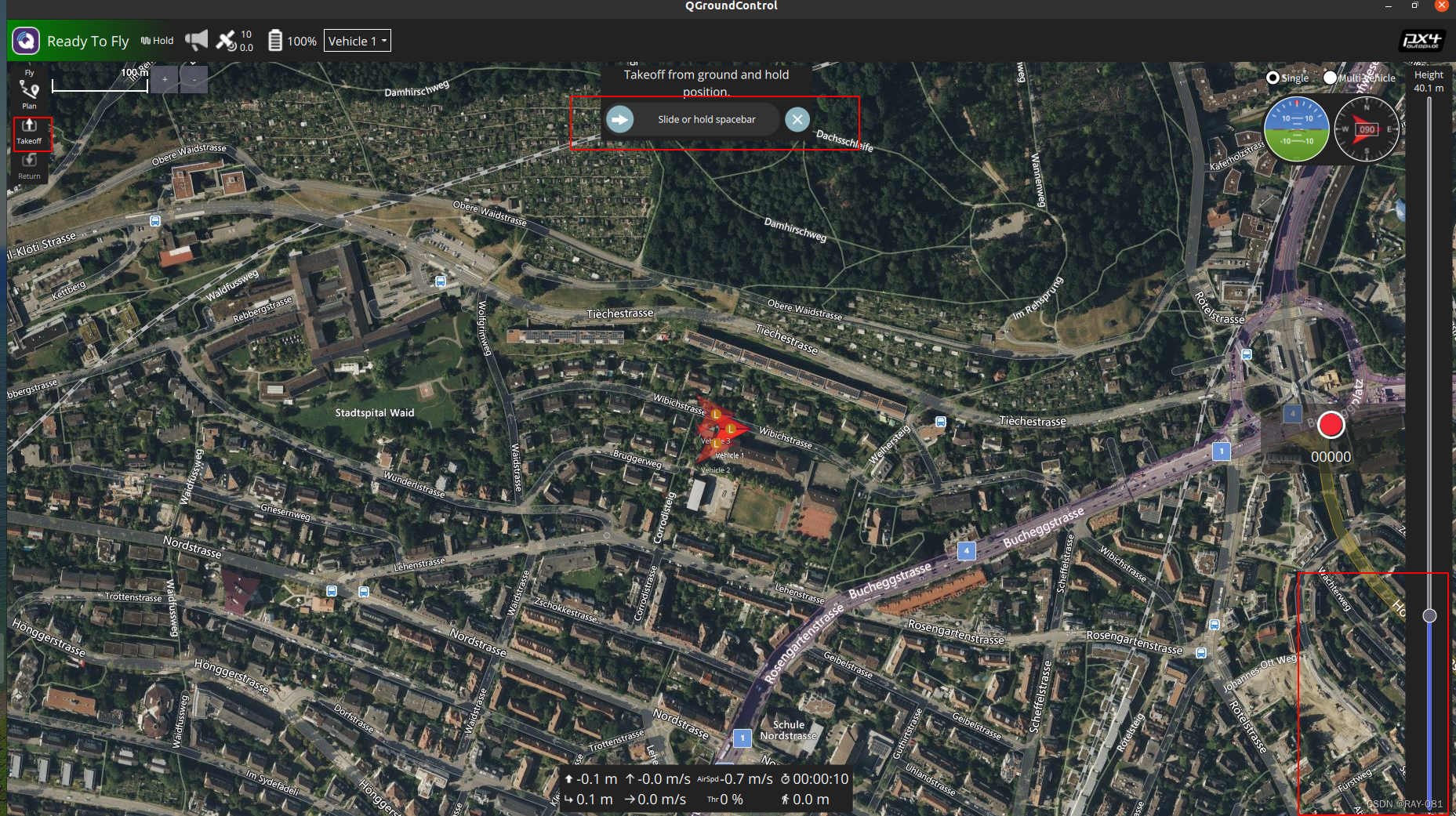
2.3.2 利用takeoff分别起飞各个无人机
按照下列顺序的图片中红框位置依次点击或滑动来起飞无人机。
2.3.3 达到预定起飞高度后,切换为固定翼模式
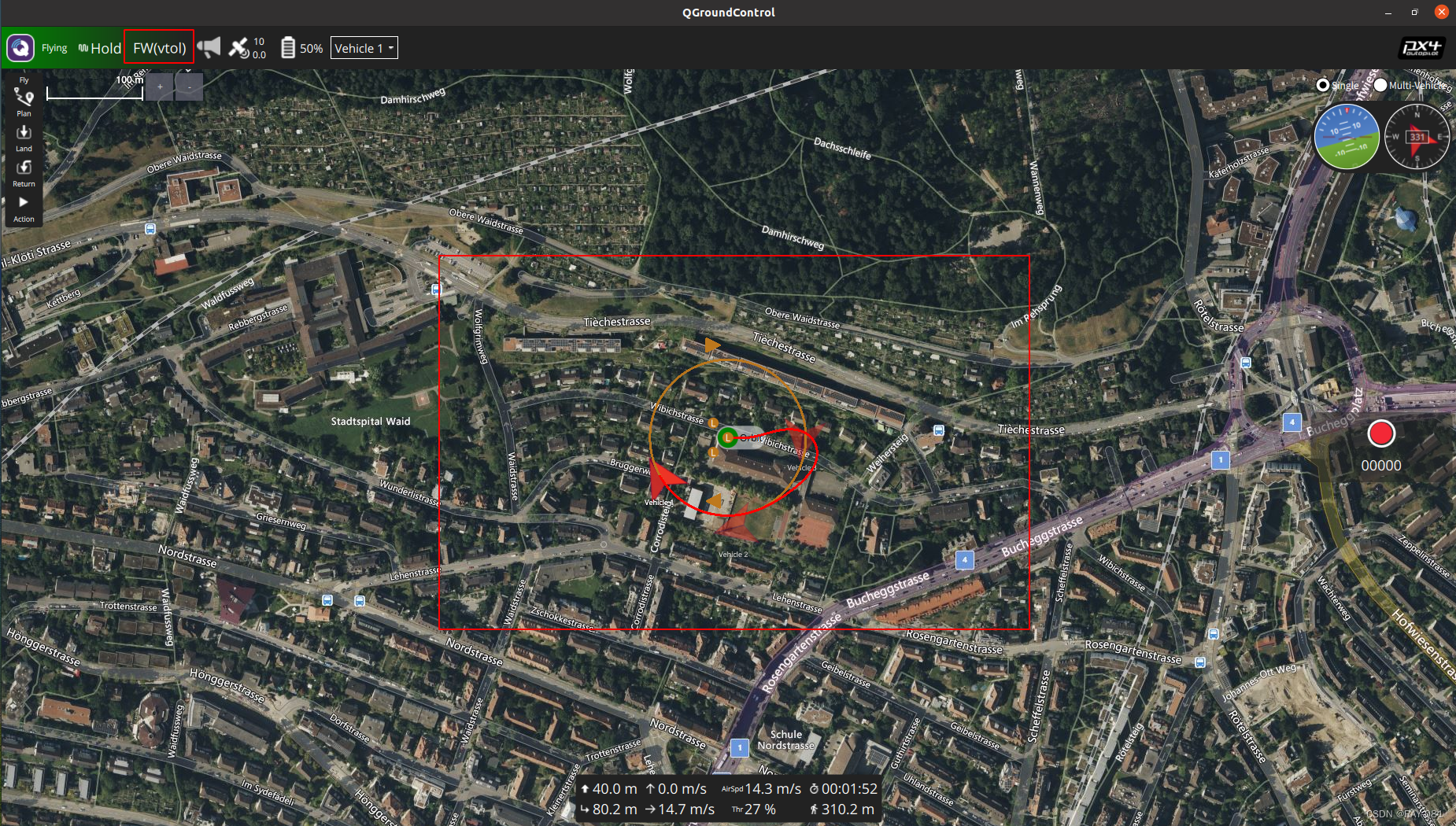
按照下列顺序的图片中红框位置依次点击来切换无人机模式。
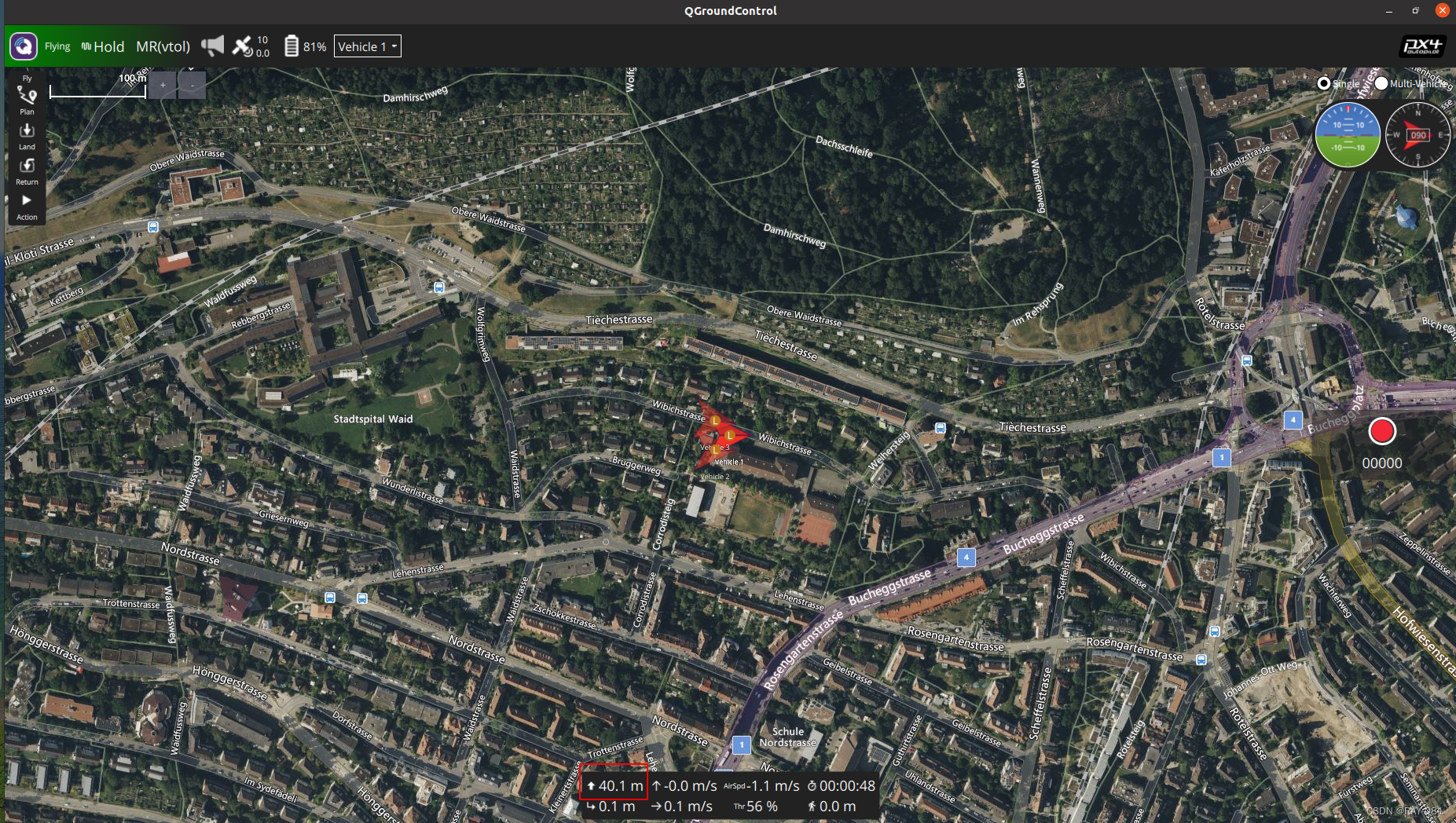
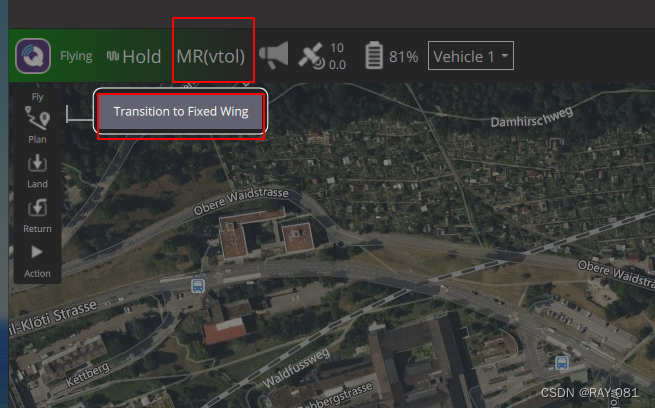
切换完成后,无人机开始盘旋,效果如下图所示。
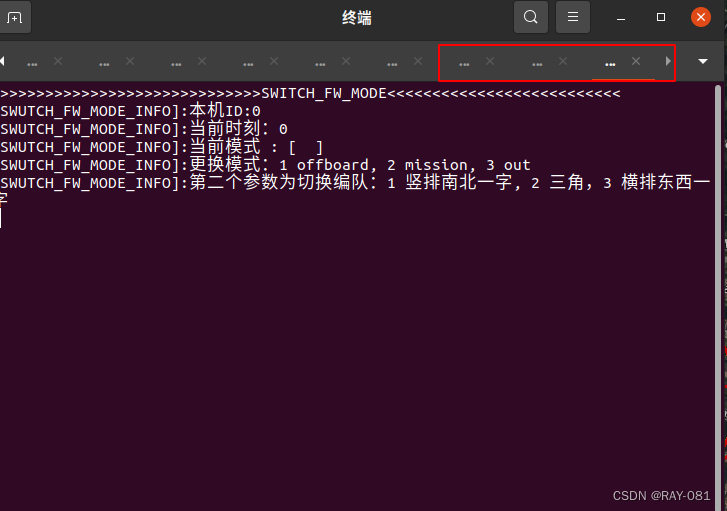
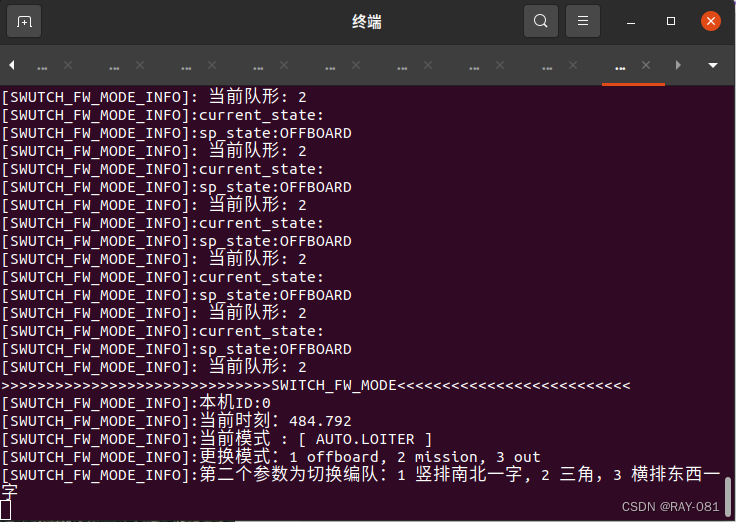
2.4 切换为offboard模式
在后三个窗口根据提示按数(数字间有空格)切换offboard模式并选择固定翼无人机编队队形,如果切换不成功可以尝试多切换几次。
输入示例:1 2 然后再按回车即可
但是,当0号机切换为offboard模式之后出现了如下报错,而后就自动降落了。
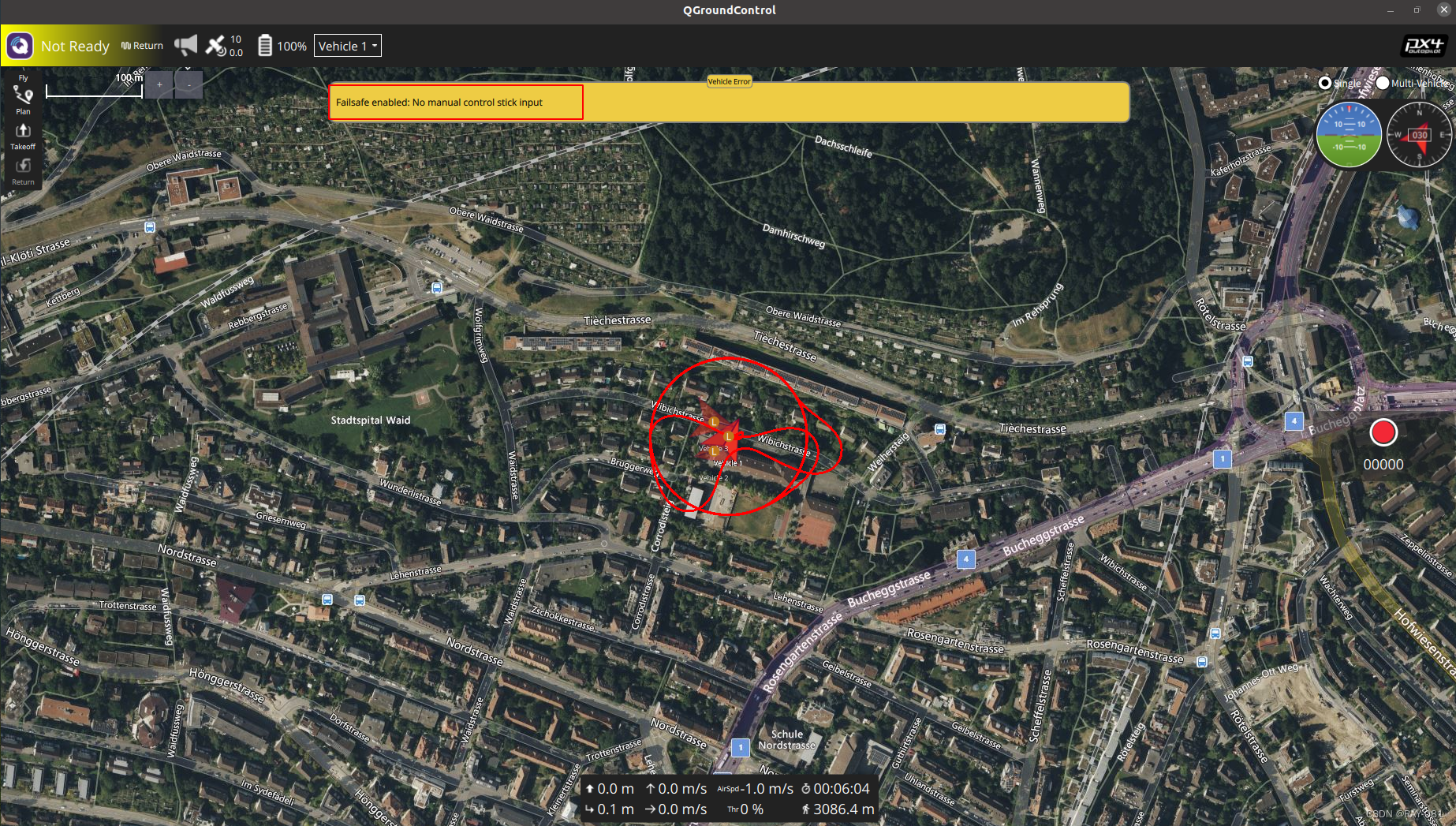
报错可能原因如下:
在QGroundControl (QGC) 地面站中,出现 "Failsafe enabled: No manual control stick input" 的提示意味着无人机进入了失效保护(Failsafe)模式,原因是未检测到手动控制杆的输入信号。这通常表示遥控器与无人机之间的通信中断,或者遥控器未发送控制信号。
至此,配置结束,剩下的教程可参考官方教程。
备注:目前“Failsafe enabled: No manual control stick input“这个问题还没有解决,后续解决后会及时更新,如果有会的大佬可以私信交流。
参考:固定翼无人机编队跟踪无人车 · 语雀
相关文章:
XTDrone-固定翼无人机编队跟踪无人车-配置教程
配置使用ROS版本为Neotic 1 配置 1.1 加载固定翼无人机编队跟踪控制工程文件 cp -r ~/XTDrone/coordination/fixed_wing_formation_control ~/catkin_ws/src 1.2 加载一些用到的功能包 sudo apt-get install ros-noetic-serial #根据自己的ROS版本修改 sudo apt-get insta…...

实现高性能、可扩展的实时数据采集系统:go-zero的应用与实践
随着互联网技术的高速发展,数据采集也越来越受到重视,成为企业获取商业价值的重要手段。在实际应用中,我们往往面临着数据量大、并发高、系统响应速度要求高、压力测试等挑战。如何实现高性能、可扩展的实时数据采集系统?本文将介…...
)
AUTOSAR NvM模块(五)
NvMRbCallbackSignatureAR45 改变回调函数的参数类型。 TRUE:根据AR44及之后版本,回调函数使用NvM_<Multi;Init>BlockRequestType参数类型。详细的函数调用参数请参考回调参数。 FALSE:根据AR43及之前版本,回调函数使用S…...

输出feign调用详细日志
开发新增一个feign调用类,调用另一个微服务的接口,总是报调用失败,想输出下调用的详细日志看看怎么回事。 第一步:查看feign的输出级别。 这个在qlm_config包里: /*** feign 日志记录级别* NONE:无日志记录…...

mac编译r2frida问题解决
在编译 https://github.com/nowsecure/r2frida 时报错: {"category": "error","code": 7006,"file": {"path": "/Users/xxx/Documents/Library/r2frida/src/agent/lib/info/index.ts","line": 494,&qu…...

中介者模式在金融业务中的应用及其框架实现
引言 中介者模式(Mediator Pattern)是一种行为设计模式,它通过引入一个中介对象来封装对象之间的交互,从而使对象不需要显式地相互引用,从而降低了对象之间的耦合性。在金融业务中,中介者模式常用于实现复…...

javaSE期末练习题
文章目录 前言一、程序控制1.顺序结构问题描述解题思路题解 2.选择结构2.1 题1问题描述解题思路题解 2.1 题2问题描述解题思路题解 3.循环结构3.1 阶乘的求取问题描述解题思路题解 3.2 水仙花数问题描述解题思路题解 二、数组三、类与对象1.类与对象1.1圆类问题描述解题思路题解…...

Linux文件数据写入
结构体 fd fd也就是文件描述符,用于标识已经打开的文件、管道、socket等。是进程和内核的桥梁,允许进程执行各种文件操作 struct fd {struct file *file;unsigned int flags; };file Linux内核中表示打开文件的结构体,包含了文件操作所需…...

vue2 中如何使用 vuedraggable 库实现拖拽功能
1.通过 npm 或 yarn 安装 vuedraggable 库 npm install vuedraggableyarn add vuedraggable 2. 引入组件内部使用,以下代码是一个Demo,可直接复制粘贴演示 注意:因项目使用了 vant,需要安装 vant 才能正常运行 <template&g…...

0基础学C++ | 第13天 | 基础知识 | 类 | 对象
目录 前言 封装 封装的意义 struct 和 class 的区别 成员属性设置为私有 前言 众所周知, C是一个面向对象的编程语言(面向对象的C语言的特点就是:封装、继、 多态),它与面向过程的C语言不通,对面向…...

Java | Leetcode Java题解之第212题单词搜索II
题目: 题解: class Solution {int[][] dirs {{1, 0}, {-1, 0}, {0, 1}, {0, -1}};public List<String> findWords(char[][] board, String[] words) {Trie trie new Trie();for (String word : words) {trie.insert(word);}Set<String> a…...

Flink面试题总结
一、简单介绍一下 Flink Apache Flink 是一个实时计算框架和分布式处理引擎,用于在无边界和有边界数据流上进行有状态的计算 二、Flink集群有哪些角色?各自有什么作用?(flink架构) --JobManager: JobManag…...

人工智能与云计算
项目要求 一个简单的集群。您需要在此项目中创建计算机集群。这些机器是 docker 容器。集群管理器是一个 Python 程序。群集的状态将写入文件。 希望通过这个 Python 文件,首先它能够通过获取输入来得到要创建的集群中包含的容器数量,并与用户进行交互(用户可以执行此集群…...

9.(vue3.x+vite)修改el-input,el-data-picker样式
效果预览 二:相关代码 <template><div style="padding: 50px"><el-input placeholder="请输入模型名称" style="width: 260px" /><br /...
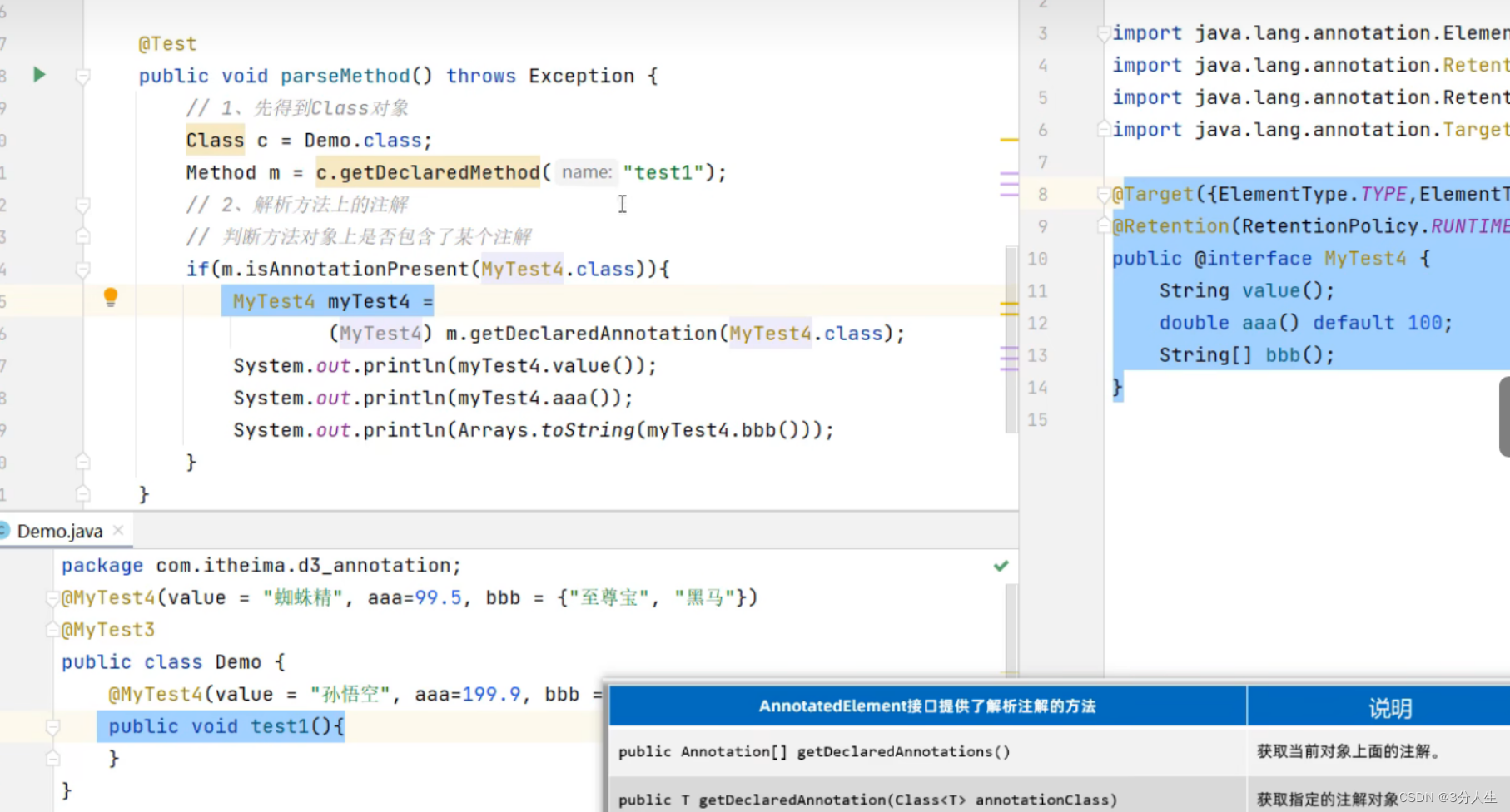
java反射和注解
反射 获取class对象的三种方法 ①:Class.forName("全类名"); ②:类名.class ③:对象.getclass(); 代码样例 package com.ithema;public class Main {public static void main(String[] args) throws ClassNotFoundException {//第…...

react_后台管理_项目
目录 1.运行项目 2. 项目结构 ①项目顶部导航栏 ②项目左侧导航栏 ③主页面-路由切换区 本项目使用的是 reacttsscss 技术栈。 1.运行项目 在当前页面顶部下载本项目,解压后使用编辑器打开,然后再终端输入命令: npm i 下载依赖后&am…...

【C语言】使用C语言编写并使用gcc编译动态链接库
【C语言】使用C 语言编写并使用 gcc 编译动态链接库 1.背景2.使用C编写代码3.使用gcc编译代码1.背景 在windows下开发很多程序接口被封装到动态链接库供其它开发者使用。 本博客使用C语言编写并使用gcc 编译 一个动态链接库文件FpdSys.dll; 然后使用C/C++/C#/Python去调用动态…...

使用supportFragmentManager管理多个fragment切换
android studio创建的项目就没有一个简单点的框架,生成的代码都是繁琐而复杂,并且不实用。 国内的页面一般都是TAB页面的比较多,老外更喜欢侧边菜单。 如果我们使用一个activity来创建程序,来用占位符管理多个fragment切换&…...

开源模型应用落地-FastAPI-助力模型交互-WebSocket篇(六)
一、前言 使用 FastAPI 可以帮助我们更简单高效地部署 AI 交互业务。FastAPI 提供了快速构建 API 的能力,开发者可以轻松地定义模型需要的输入和输出格式,并编写好相应的业务逻辑。 FastAPI 的异步高性能架构,可以有效支持大量并发的预测请求,为用户提供流畅的交互体验。此外,F…...
独立开发者系列(17)——MYSQL的常见异常整理
虽然安装MYSQL到本地很简单,但是数据库报错还是经常出现,这个时候,需要我们进行逐步检查与修复。作为我们最常用的开发软件,无论切换php/go/python/node/java,数据库的身影都少不了,对于我们储存数据而言&a…...
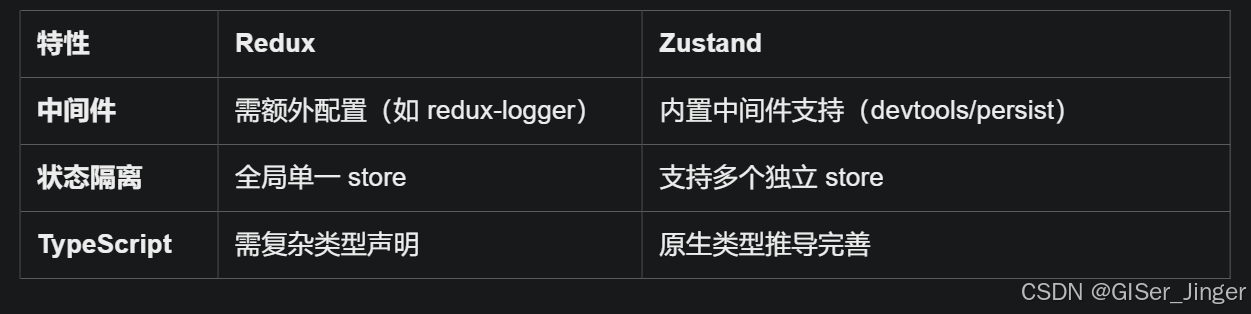
Zustand 状态管理库:极简而强大的解决方案
Zustand 是一个轻量级、快速和可扩展的状态管理库,特别适合 React 应用。它以简洁的 API 和高效的性能解决了 Redux 等状态管理方案中的繁琐问题。 核心优势对比 基本使用指南 1. 创建 Store // store.js import create from zustandconst useStore create((set)…...

在鸿蒙HarmonyOS 5中实现抖音风格的点赞功能
下面我将详细介绍如何使用HarmonyOS SDK在HarmonyOS 5中实现类似抖音的点赞功能,包括动画效果、数据同步和交互优化。 1. 基础点赞功能实现 1.1 创建数据模型 // VideoModel.ets export class VideoModel {id: string "";title: string ""…...

PHP和Node.js哪个更爽?
先说结论,rust完胜。 php:laravel,swoole,webman,最开始在苏宁的时候写了几年php,当时觉得php真的是世界上最好的语言,因为当初活在舒适圈里,不愿意跳出来,就好比当初活在…...

MongoDB学习和应用(高效的非关系型数据库)
一丶 MongoDB简介 对于社交类软件的功能,我们需要对它的功能特点进行分析: 数据量会随着用户数增大而增大读多写少价值较低非好友看不到其动态信息地理位置的查询… 针对以上特点进行分析各大存储工具: mysql:关系型数据库&am…...
Cilium动手实验室: 精通之旅---20.Isovalent Enterprise for Cilium: Zero Trust Visibility
Cilium动手实验室: 精通之旅---20.Isovalent Enterprise for Cilium: Zero Trust Visibility 1. 实验室环境1.1 实验室环境1.2 小测试 2. The Endor System2.1 部署应用2.2 检查现有策略 3. Cilium 策略实体3.1 创建 allow-all 网络策略3.2 在 Hubble CLI 中验证网络策略源3.3 …...

Auto-Coder使用GPT-4o完成:在用TabPFN这个模型构建一个预测未来3天涨跌的分类任务
通过akshare库,获取股票数据,并生成TabPFN这个模型 可以识别、处理的格式,写一个完整的预处理示例,并构建一个预测未来 3 天股价涨跌的分类任务 用TabPFN这个模型构建一个预测未来 3 天股价涨跌的分类任务,进行预测并输…...

《用户共鸣指数(E)驱动品牌大模型种草:如何抢占大模型搜索结果情感高地》
在注意力分散、内容高度同质化的时代,情感连接已成为品牌破圈的关键通道。我们在服务大量品牌客户的过程中发现,消费者对内容的“有感”程度,正日益成为影响品牌传播效率与转化率的核心变量。在生成式AI驱动的内容生成与推荐环境中࿰…...

聊一聊接口测试的意义有哪些?
目录 一、隔离性 & 早期测试 二、保障系统集成质量 三、验证业务逻辑的核心层 四、提升测试效率与覆盖度 五、系统稳定性的守护者 六、驱动团队协作与契约管理 七、性能与扩展性的前置评估 八、持续交付的核心支撑 接口测试的意义可以从四个维度展开,首…...

重启Eureka集群中的节点,对已经注册的服务有什么影响
先看答案,如果正确地操作,重启Eureka集群中的节点,对已经注册的服务影响非常小,甚至可以做到无感知。 但如果操作不当,可能会引发短暂的服务发现问题。 下面我们从Eureka的核心工作原理来详细分析这个问题。 Eureka的…...

HarmonyOS运动开发:如何用mpchart绘制运动配速图表
##鸿蒙核心技术##运动开发##Sensor Service Kit(传感器服务)# 前言 在运动类应用中,运动数据的可视化是提升用户体验的重要环节。通过直观的图表展示运动过程中的关键数据,如配速、距离、卡路里消耗等,用户可以更清晰…...