【状态估计】线性高斯系统的状态估计——离散时间的递归滤波
前两篇文章介绍了离散时间的批量估计、离散时间的递归平滑,本文着重介绍离散时间的递归滤波。
前两篇位置:【状态估计】线性高斯系统的状态估计——离散时间的批量估计、【状态估计】线性高斯系统的状态估计——离散时间的递归平滑。
离散时间的递归滤波算法
批量优化的方案及其对应的平滑算法方案,是LG问题下能找到的最好的方法了。它利用了所有能用的数据,来估计所有时刻的状态。不过这个方法有一个致命的问题:无法在线运行,因为它需要用未来时刻的信息估计过去的状态。为了在实时场合下使用,当前时刻的状态只能由它之前时间的信息决定,而卡尔曼滤波则是对这样一个问题的传统解决方案。
之前讲述了如何从Cholesky分解推导出卡尔曼滤波,实际上并不需要这么复杂,接下来介绍几种推导卡尔曼滤波的方法。
通过MAP推导卡尔曼滤波
假设已经有了 k − 1 k-1 k−1时刻的前向估计:
{ x ^ k − 1 , P ^ k − 1 } \{\hat x_{k-1},\hat P_{k-1}\} {x^k−1,P^k−1}
这两个量是根据初始时刻到 k − 1 k-1 k−1时刻的数据推导出来的。目标是计算:
{ x ^ k , P ^ k } \{\hat x_k,\hat P_k\} {x^k,P^k}
其中,需要用到直到 k k k时刻的数据。实际上没有必要再从初始时刻开始,而是简单地用 k − 1 k-1 k−1时刻的状态,以及 k k k时刻的 v k v_k vk、 y k y_k yk就能估计出 k k k时刻的状态了:
{ x ^ k − 1 , P ^ k − 1 , v k , y k } − − > { x ^ k , P ^ k } \{\hat x_{k-1},\hat P_{k-1},v_k,y_k\}-->\{\hat x_k,\hat P_k\} {x^k−1,P^k−1,vk,yk}−−>{x^k,P^k}
为了推导这个过程,定义:
z = [ x ^ k − 1 v k y k ] z=\begin{bmatrix}\hat x_{k-1}\\v_k\\y_k\end{bmatrix} z= x^k−1vkyk
H = [ 1 − A k − 1 1 C k ] H=\begin{bmatrix}1\\-A_{k-1}&1\\&C_k\end{bmatrix} H= 1−Ak−11Ck
W = [ P ^ k − 1 Q k R k ] W=\begin{bmatrix}\hat P_{k-1}\\&Q_k\\&&R_k\end{bmatrix} W= P^k−1QkRk
x ^ = [ x ^ k − 1 ′ x ^ k ] \hat x=\begin{bmatrix}\hat x_{k-1}^{'}\\\hat x_k\end{bmatrix} x^=[x^k−1′x^k]
其中, x ^ k − 1 ′ \hat x_{k-1}^{'} x^k−1′表示使用了直到 k k k时刻的数据计算的 k − 1 k-1 k−1时刻的状态估计,而 x ^ k − 1 \hat x_{k-1} x^k−1表示使用了直到 k − 1 k-1 k−1时刻的数据计算的 k − 1 k-1 k−1时刻的状态估计,两者之间相差一个 k k k时刻的后向估计。
通常MAP的最优解 x ^ \hat x x^写成:
( H T W − 1 H ) x ^ = H T W − 1 z (H^TW^{-1}H)\hat x=H^TW^{-1}z (HTW−1H)x^=HTW−1z
将上面的定义代入:
[ P ^ k − 1 − 1 + A k − 1 T Q k − 1 A k − 1 − A k − 1 T Q k − 1 − Q k − 1 A k − 1 Q k − 1 + C k T R k − 1 C k ] [ x ^ k − 1 ′ x ^ k ] = [ P ^ k − 1 − 1 x ^ k − 1 − A k − 1 T Q k − 1 v k Q k − 1 v k + C k T R k − 1 y k ] \begin{bmatrix}\hat P_{k-1}^{-1}+A_{k-1}^TQ_k^{-1}A_{k-1}&-A_{k-1}^TQ_k^{-1}\\-Q_k^{-1}A_{k-1}&Q_k^{-1}+C_k^TR_k^{-1}C_k\end{bmatrix}\begin{bmatrix}\hat x_{k-1}^{'}\\\hat x_k\end{bmatrix}=\begin{bmatrix}\hat P_{k-1}^{-1}\hat x_{k-1}-A_{k-1}^TQ_k^{-1}v_k\\Q_k^{-1}v_k+C^T_kR_k^{-1}y_k\end{bmatrix} [P^k−1−1+Ak−1TQk−1Ak−1−Qk−1Ak−1−Ak−1TQk−1Qk−1+CkTRk−1Ck][x^k−1′x^k]=[P^k−1−1x^k−1−Ak−1TQk−1vkQk−1vk+CkTRk−1yk]
由于并不关心 x ^ k − 1 ′ \hat x_{k-1}^{'} x^k−1′的实际值,因此可以将它边缘化,等式两侧左乘:
[ 1 0 Q k − 1 A k − 1 ( P ^ k − 1 − 1 + A k − 1 T Q k − 1 A k − 1 ) − 1 1 ] \begin{bmatrix}1&0\\Q_k^{-1}A_{k-1}(\hat P_{k-1}^{-1}+A_{k-1}^TQ_k^{-1}A_{k-1})^{-1}&1\end{bmatrix} [1Qk−1Ak−1(P^k−1−1+Ak−1TQk−1Ak−1)−101]
这是一元线性方程的行操作,于是变成:
[ P ^ k − 1 − 1 + A k − 1 T Q k − 1 A k − 1 − A k − 1 T Q k − 1 0 Q k − 1 − Q k − 1 A k − 1 ( P ^ k − 1 − 1 + A k − 1 T Q k − 1 A k − 1 ) − 1 A k − 1 T Q k − 1 + C k T R k − 1 C k ] [ x ^ k − 1 ′ x ^ k ] = [ P ^ k − 1 − 1 x ^ k − 1 − A k − 1 T Q k − 1 v k Q k − 1 A k − 1 ( P ^ k − 1 − 1 + A k − 1 T Q k − 1 A k − 1 ) − 1 ( P ^ k − 1 − 1 x ^ k − 1 − A k − 1 T Q k − 1 v k ) + Q k − 1 v k + C k T R k − 1 y k ] \begin{bmatrix}\hat P_{k-1}^{-1}+A_{k-1}^TQ_k^{-1}A_{k-1}&-A_{k-1}^TQ_k^{-1}\\0&Q_k^{-1}-Q_k^{-1}A_{k-1}(\hat P_{k-1}^{-1}+A_{k-1}^TQ_k^{-1}A_{k-1})^{-1}A_{k-1}^TQ_k^{-1}+C_k^TR_k^{-1}C_k\end{bmatrix}\begin{bmatrix}\hat x_{k-1}^{'}\\\hat x_k\end{bmatrix}=\begin{bmatrix}\hat P_{k-1}^{-1}\hat x_{k-1}-A_{k-1}^TQ_k^{-1}v_k\\Q_k^{-1}A_{k-1}(\hat P_{k-1}^{-1}+A_{k-1}^TQ_k^{-1}A_{k-1})^{-1}(\hat P_{k-1}^{-1}\hat x_{k-1}-A_{k-1}^TQ_k^{-1}v_k)+Q_k^{-1}v_k+C_k^TR_k^{-1}y_k\end{bmatrix} [P^k−1−1+Ak−1TQk−1Ak−10−Ak−1TQk−1Qk−1−Qk−1Ak−1(P^k−1−1+Ak−1TQk−1Ak−1)−1Ak−1TQk−1+CkTRk−1Ck][x^k−1′x^k]=[P^k−1−1x^k−1−Ak−1TQk−1vkQk−1Ak−1(P^k−1−1+Ak−1TQk−1Ak−1)−1(P^k−1−1x^k−1−Ak−1TQk−1vk)+Qk−1vk+CkTRk−1yk]
因此,只需要关注 x ^ k \hat x_k x^k:
( Q k − 1 − Q k − 1 A k − 1 ( P ^ k − 1 − 1 + A k − 1 T Q k − 1 A k − 1 ) − 1 A k − 1 T Q k − 1 + C k T R k − 1 C k ) x ^ k = Q k − 1 A k − 1 ( P ^ k − 1 − 1 + A k − 1 T Q k − 1 A k − 1 ) − 1 ( P ^ k − 1 − 1 x ^ k − 1 − A k − 1 T Q k − 1 v k ) + Q k − 1 v k + C k T R k − 1 y k (Q_k^{-1}-Q_k^{-1}A_{k-1}(\hat P_{k-1}^{-1}+A_{k-1}^TQ_k^{-1}A_{k-1})^{-1}A_{k-1}^TQ_k^{-1}+C_k^TR_k^{-1}C_k)\hat x_k=Q_k^{-1}A_{k-1}(\hat P_{k-1}^{-1}+A_{k-1}^TQ_k^{-1}A_{k-1})^{-1}(\hat P_{k-1}^{-1}\hat x_{k-1}-A_{k-1}^TQ_k^{-1}v_k)+Q_k^{-1}v_k+C_k^TR_k^{-1}y_k (Qk−1−Qk−1Ak−1(P^k−1−1+Ak−1TQk−1Ak−1)−1Ak−1TQk−1+CkTRk−1Ck)x^k=Qk−1Ak−1(P^k−1−1+Ak−1TQk−1Ak−1)−1(P^k−1−1x^k−1−Ak−1TQk−1vk)+Qk−1vk+CkTRk−1yk
根据SMW恒等式:
Q k − 1 − Q k − 1 A k − 1 ( P ^ k − 1 − 1 + A k − 1 T Q k − 1 A k − 1 ) − 1 A k − 1 T Q k − 1 = ( Q k + A k − 1 P ^ k − 1 A k − 1 T ) − 1 Q_k^{-1}-Q_k^{-1}A_{k-1}(\hat P_{k-1}^{-1}+A_{k-1}^TQ_k^{-1}A_{k-1})^{-1}A_{k-1}^TQ_k^{-1}=(Q_k+A_{k-1}\hat P_{k-1}A_{k-1}^T)^{-1} Qk−1−Qk−1Ak−1(P^k−1−1+Ak−1TQk−1Ak−1)−1Ak−1TQk−1=(Qk+Ak−1P^k−1Ak−1T)−1
定义:
P ˇ k = Q k + A k − 1 P ^ k − 1 A k − 1 T \check P_k=Q_k+A_{k-1}\hat P_{k-1}A_{k-1}^T Pˇk=Qk+Ak−1P^k−1Ak−1T
P ^ k = ( P ˇ k − 1 + C k T R k − 1 C k ) − 1 \hat P_k=(\check P_k^{-1}+C_k^TR_k^{-1}C_k)^{-1} P^k=(Pˇk−1+CkTRk−1Ck)−1
原式可化简为:
P ^ k − 1 x ^ k = Q k − 1 A k − 1 ( P ^ k − 1 − 1 + A k − 1 T Q k − 1 A k − 1 ) − 1 ( P ^ k − 1 − 1 x ^ k − 1 − A k − 1 T Q k − 1 v k ) + Q k − 1 v k + C k T R k − 1 y k = Q k − 1 A k − 1 ( P ^ k − 1 − 1 + A k − 1 T Q k − 1 A k − 1 ) − 1 P ^ k − 1 − 1 x ^ k − 1 + ( Q k − 1 − Q k − 1 A k − 1 ( P ^ k − 1 − 1 + A k − 1 T Q k − 1 A k − 1 ) − 1 A k − 1 T Q k − 1 ) v k + C k T R k − 1 y k = P ˇ k − 1 A k − 1 x ^ k − 1 + P ˇ k − 1 v k + C k T R k − 1 y k = P ˇ k − 1 ( A k − 1 x ^ k − 1 + v k ) + C k T R k − 1 y k = P ˇ k − 1 x ˇ k + C k T R k − 1 y k \begin{aligned}\hat P_k^{-1}\hat x_k&=Q_k^{-1}A_{k-1}(\hat P_{k-1}^{-1}+A_{k-1}^TQ_k^{-1}A_{k-1})^{-1}(\hat P_{k-1}^{-1}\hat x_{k-1}-A_{k-1}^TQ_k^{-1}v_k)+Q_k^{-1}v_k+C_k^TR_k^{-1}y_k \\&=Q_k^{-1}A_{k-1}(\hat P_{k-1}^{-1}+A_{k-1}^TQ_k^{-1}A_{k-1})^{-1}\hat P_{k-1}^{-1}\hat x_{k-1}+(Q_k^{-1}-Q_k^{-1}A_{k-1}(\hat P_{k-1}^{-1}+A_{k-1}^TQ_k^{-1}A_{k-1})^{-1}A_{k-1}^TQ_k^{-1})v_k+C_k^TR_k^{-1}y_k \\&=\check P_k^{-1}A_{k-1}\hat x_{k-1}+\check P_k^{-1}v_k+C_k^TR_k^{-1}y_k \\ &=\check P_k^{-1}(A_{k-1}\hat x_{k-1}+v_k)+C_k^TR_k^{-1}y_k \\ &=\check P_k^{-1}\check x_k+C_k^TR_k^{-1}y_k\end{aligned} P^k−1x^k=Qk−1Ak−1(P^k−1−1+Ak−1TQk−1Ak−1)−1(P^k−1−1x^k−1−Ak−1TQk−1vk)+Qk−1vk+CkTRk−1yk=Qk−1Ak−1(P^k−1−1+Ak−1TQk−1Ak−1)−1P^k−1−1x^k−1+(Qk−1−Qk−1Ak−1(P^k−1−1+Ak−1TQk−1Ak−1)−1Ak−1TQk−1)vk+CkTRk−1yk=Pˇk−1Ak−1x^k−1+Pˇk−1vk+CkTRk−1yk=Pˇk−1(Ak−1x^k−1+vk)+CkTRk−1yk=Pˇk−1xˇk+CkTRk−1yk
梳理一下整个过程:
预测:
x ˇ k = A k − 1 x ^ k − 1 + v k P ˇ k = A k − 1 P ^ k − 1 A k − 1 T + Q k \begin{aligned}\check x_k&=A_{k-1}\hat x_{k-1}+v_k \\ \check P_k&=A_{k-1}\hat P_{k-1}A_{k-1}^T+Q_k\end{aligned} xˇkPˇk=Ak−1x^k−1+vk=Ak−1P^k−1Ak−1T+Qk
更新:
P ^ k = ( P ˇ k − 1 + C k T R k − 1 C k ) − 1 P ^ k − 1 x ^ k = P ˇ k − 1 x ˇ k + C k T R k − 1 y k \begin{aligned}\hat P_k&=(\check P_k^{-1}+C_k^TR_k^{-1}C_k)^{-1} \\ \hat P_k^{-1}\hat x_k&=\check P_k^{-1}\check x_k+C_k^TR_k^{-1}y_k\end{aligned} P^kP^k−1x^k=(Pˇk−1+CkTRk−1Ck)−1=Pˇk−1xˇk+CkTRk−1yk
这是逆协方差形式(信息形式)的卡尔曼滤波。为了得到经典形式的卡尔曼滤波,需要定义卡尔曼增益 K k K_k Kk:
K k = P ^ k C k T R k − 1 K_k=\hat P_kC_k^TR_k^{-1} Kk=P^kCkTRk−1
经过化简,更新:
K k = P ˇ k C k T ( C k P ˇ k C k T + R k ) − 1 P ^ k = ( 1 − K k C k ) P ˇ k x ^ k = x ˇ k + K k ( y k − C k x ˇ k ) \begin{aligned}K_k&=\check P_kC_k^T(C_k\check P_kC_k^T+R_k)^{-1} \\ \hat P_k&=(1-K_kC_k)\check P_k \\\hat x_k&=\check x_k+K_k(y_k-C_k\check x_k)\end{aligned} KkP^kx^k=PˇkCkT(CkPˇkCkT+Rk)−1=(1−KkCk)Pˇk=xˇk+Kk(yk−Ckxˇk)
其中, y k − C k x ˇ k y_k-C_k\check x_k yk−Ckxˇk称为更新量,指的是实际与期望观测量的误差,而卡尔曼增益则是这部分更新量对估计值的权重。
通过贝叶斯推断推导卡尔曼滤波
使用贝叶斯推断方法还能够以更简洁的方式推出卡尔曼滤波。假设 k − 1 k-1 k−1时刻的高斯先验为:
p ( x k − 1 ∣ x ˇ 0 , v 1 : k − 1 , y 0 : k − 1 ) = N ( x ^ k − 1 , P ^ k − 1 ) p(x_{k-1}|\check x_0,v_{1:k-1},y_{0:k-1})=N(\hat x_{k-1},\hat P_{k-1}) p(xk−1∣xˇ0,v1:k−1,y0:k−1)=N(x^k−1,P^k−1)
首先,对于预测部份,考虑最近时刻的输入 v k v_{k} vk,来计算 k k k时刻的先验:
p ( x k ∣ x ˇ 0 , v 1 : k , y 0 : k − 1 ) = N ( x ˇ k , P ˇ k ) p(x_k|\check x_0,v_{1:k},y_{0:k-1})=N(\check x_k,\check P_k) p(xk∣xˇ0,v1:k,y0:k−1)=N(xˇk,Pˇk)
其中:
x ˇ k = E [ x k ] = E [ A k − 1 x k − 1 + v k + w k ] = A k − 1 x ^ k − 1 + v k \check x_k=E[x_k]=E[A_{k-1}x_{k-1}+v_k+w_k]=A_{k-1}\hat x_{k-1}+v_k xˇk=E[xk]=E[Ak−1xk−1+vk+wk]=Ak−1x^k−1+vk
P ˇ k = E [ ( x k − E [ x k ] ) ( x k − E [ x k ] ) T ] = A k − 1 E [ ( x k − 1 − x ^ k − 1 ) ( x k − 1 − x ^ k − 1 ) T ] A k − 1 T + E [ w k w k t ] = A k − 1 P ^ k − 1 A k − 1 T + Q k \begin{aligned}\check P_k&=E[(x_k-E[x_k])(x_k-E[x_k])^T]\\&=A_{k-1}E[(x_{k-1}-\hat x_{k-1})(x_{k-1}-\hat x_{k-1})^T]A_{k-1}^T+E[w_kw_k^t]\\&=A_{k-1}\hat P_{k-1}A_{k-1}^T+Q_k\end{aligned} Pˇk=E[(xk−E[xk])(xk−E[xk])T]=Ak−1E[(xk−1−x^k−1)(xk−1−x^k−1)T]Ak−1T+E[wkwkt]=Ak−1P^k−1Ak−1T+Qk
然后,对于更新部分,将状态与最新一次测量(即 k k k时刻)写成联合高斯分布的形式:
p ( x k , y k ∣ x ˇ 0 , v 1 : k , y 0 : k − 1 ) = N ( [ μ x μ y ] , [ Σ x x Σ x y Σ y x Σ y y ] ) = N ( [ x ˇ k C k x ˇ k ] , [ P ˇ k P ˇ k C k T C k P ˇ k C k P ˇ k C k T + R k ] ) p(x_k,y_k|\check x_0,v_{1:k},y_{0:k-1})=N(\begin{bmatrix}\mu_x\\\mu_y\end{bmatrix},\begin{bmatrix}\Sigma_{xx}&\Sigma_{xy}\\\Sigma_{yx}&\Sigma_{yy}\end{bmatrix})=N(\begin{bmatrix}\check x_k\\C_k\check x_k\end{bmatrix},\begin{bmatrix}\check P_k&\check P_kC_k^T\\C_k\check P_k&C_k\check P_kC_k^T+R_k\end{bmatrix}) p(xk,yk∣xˇ0,v1:k,y0:k−1)=N([μxμy],[ΣxxΣyxΣxyΣyy])=N([xˇkCkxˇk],[PˇkCkPˇkPˇkCkTCkPˇkCkT+Rk])
根据高斯推断,可以得到:
p ( x k ∣ x ˇ 0 , v 1 : k , y 0 : k ) = N ( μ x + Σ x y Σ y y − 1 ( y k − μ y ) , Σ x x − Σ x y Σ y y − 1 Σ y x ) p(x_k|\check x_0,v_{1:k},y_{0:k})=N(\mu_x+\Sigma_{xy}\Sigma_{yy}^{-1}(y_k-\mu_y),\Sigma_{xx}-\Sigma_{xy}\Sigma_{yy}^{-1}\Sigma_{yx}) p(xk∣xˇ0,v1:k,y0:k)=N(μx+ΣxyΣyy−1(yk−μy),Σxx−ΣxyΣyy−1Σyx)
代入之前的结果,有:
K k = P ˇ k C k T ( C k P ˇ k C k T + R k ) − 1 P ^ k = ( 1 − K k C k ) P ˇ k x ^ k = x ˇ k + K k ( y k − C k x ˇ k ) \begin{aligned}K_k&=\check P_kC_k^T(C_k\check P_kC_k^T+R_k)^{-1} \\ \hat P_k&=(1-K_kC_k)\check P_k \\ \hat x_k&=\check x_k+K_k(y_k-C_k\check x_k)\end{aligned} KkP^kx^k=PˇkCkT(CkPˇkCkT+Rk)−1=(1−KkCk)Pˇk=xˇk+Kk(yk−Ckxˇk)
这与MAP给出的更新步骤的方程是完全一致的。
重申一遍,这件事情的根本在于使用了线性模型,且噪声和先验也都是高斯的。在这些条件下,后验概率也是高斯的,于是它的均值和模正巧是一样的。然而在使用非线性模型之后就不能保证这个性质了。
从增益最优化的角度来看卡尔曼滤波
通常来说,卡尔曼滤波是线性高斯系统下的最优解。因此,也可以从其他的角度来看卡尔曼滤波的最优特性。下面介绍其中的一个:
假设有一个估计器,形式如下:
x ^ k = x ˇ k + K k ( y k − C k x ˇ k ) \hat x_k=\check x_k+K_k(y_k-C_k\check x_k) x^k=xˇk+Kk(yk−Ckxˇk)
但是此时并不知道如何选取 K k K_k Kk的值,才能正确地衡量修正部分的权重。如果定义状态的误差为(估计值 - 真值):
e ^ k = x ^ k − x k \hat e_k=\hat x_k-x_k e^k=x^k−xk
那么有:
P ^ k = E [ e ^ k e ^ k T ] = E [ ( x ^ k − x k ) ( x ^ k − x k ) T ] = E [ ( x ˇ k + K k ( C k x k + n k − C k x ˇ k ) − x k ) ( x ˇ k + K k ( C k x k + n k − C k x ˇ k ) − x k ) T ] = E [ ( ( 1 − K k C k ) ( x ˇ k − x k ) + K k n k ) ( ( 1 − K k C k ) ( x ˇ k − x k ) + K k n k ) T ] = ( 1 − K k C k ) E [ ( x ˇ k − x k ) ( x ˇ k − x k ) T ] ( 1 − K k C k ) T + K k E [ C k C k T ] K k T = ( 1 − K k C k ) P ˇ k ( 1 − K k C k ) T + K k R k K k T = P ˇ k − K k C k P ˇ k − P ˇ k C k T K k T + K k ( C k P ˇ k C k T + R k ) K k T \begin{aligned}\hat P_k&=E[\hat e_k\hat e_k^T]\\&=E[(\hat x_k-x_k)(\hat x_k-x_k)^T]\\&=E[(\check x_k+K_k(C_kx_k+n_k-C_k\check x_k)-x_k)(\check x_k+K_k(C_kx_k+n_k-C_k\check x_k)-x_k)^T]\\&=E[((1-K_kC_k)(\check x_k-x_k)+K_kn_k)((1-K_kC_k)(\check x_k-x_k)+K_kn_k)^T]\\&=(1-K_kC_k)E[(\check x_k-x_k)(\check x_k-x_k)^T](1-K_kC_k)^T+K_kE[C_kC_k^T]K_k^T\\&=(1-K_kC_k)\check P_k(1-K_kC_k)^T+K_kR_kK_k^T \\ &=\check P_k-K_kC_k\check P_k-\check P_kC_k^TK_k^T+K_k(C_k\check P_kC_k^T+R_k)K_k^T\end{aligned} P^k=E[e^ke^kT]=E[(x^k−xk)(x^k−xk)T]=E[(xˇk+Kk(Ckxk+nk−Ckxˇk)−xk)(xˇk+Kk(Ckxk+nk−Ckxˇk)−xk)T]=E[((1−KkCk)(xˇk−xk)+Kknk)((1−KkCk)(xˇk−xk)+Kknk)T]=(1−KkCk)E[(xˇk−xk)(xˇk−xk)T](1−KkCk)T+KkE[CkCkT]KkT=(1−KkCk)Pˇk(1−KkCk)T+KkRkKkT=Pˇk−KkCkPˇk−PˇkCkTKkT+Kk(CkPˇkCkT+Rk)KkT
接下来最小均方差开始正式登场了。由于协方差矩阵的对角线元素就是方差,这样一来,把协方差矩阵的对角线元素求和,用 t r tr tr来表示这种算子,它的学名叫矩阵的迹。
于是,可以由它定义出一个代价函数:
J ( K k ) = t r ( E [ e ^ k e ^ k T ] ) = t r ( P ˇ k ) − 2 t r ( K k C k P ˇ k ) + t r ( K k ( C k P ˇ k C k T + R k ) K k T ) \begin{aligned}J(K_k)&=tr(E[\hat e_k\hat e_k^T])\\&=tr(\check P_k)-2tr(K_kC_k\check P_k)+tr(K_k(C_k\check P_kC_k^T+R_k)K_k^T)\end{aligned} J(Kk)=tr(E[e^ke^kT])=tr(Pˇk)−2tr(KkCkPˇk)+tr(Kk(CkPˇkCkT+Rk)KkT)
最小均方差就是使得 J ( K k ) J(K_k) J(Kk)最小,对未知量 K k K_k Kk求导,令导函数等于0:
d J ( K k ) d K k = − 2 ( C k P ˇ k ) T + 2 K k ( C k P ˇ k C k T + R k ) \frac{dJ(K_k)}{dK_k}=-2(C_k\check P_k)^T+2K_k(C_k\check P_kC_k^T+R_k) dKkdJ(Kk)=−2(CkPˇk)T+2Kk(CkPˇkCkT+Rk)
因此:
K k = P ˇ k C k T ( C k P ˇ k C k T + R k ) − 1 K_k=\check P_kC_k^T(C_k\check P_kC_k^T+R_k)^{-1} Kk=PˇkCkT(CkPˇkCkT+Rk)−1
这正是卡尔曼增益的通常表达式。
关于卡尔曼滤波的讨论
以下是卡尔曼滤波的要点:
- 对于高斯噪声的线性系统,卡尔曼滤波器是最优线性无偏估计;
- 必须有初始状态: { x ˇ 0 , P ˇ 0 } \{\check x_0,\check P_0\} {xˇ0,Pˇ0};
- 协方差部分与均值部分可以独立地递推。有时甚至可以计算一个固定的 K k K_k Kk,用于所有时刻的均值修正,这种做法称为固定状态的卡尔曼滤波。
相关文章:

【状态估计】线性高斯系统的状态估计——离散时间的递归滤波
前两篇文章介绍了离散时间的批量估计、离散时间的递归平滑,本文着重介绍离散时间的递归滤波。 前两篇位置:【状态估计】线性高斯系统的状态估计——离散时间的批量估计、【状态估计】线性高斯系统的状态估计——离散时间的递归平滑。 离散时间的递归滤波…...
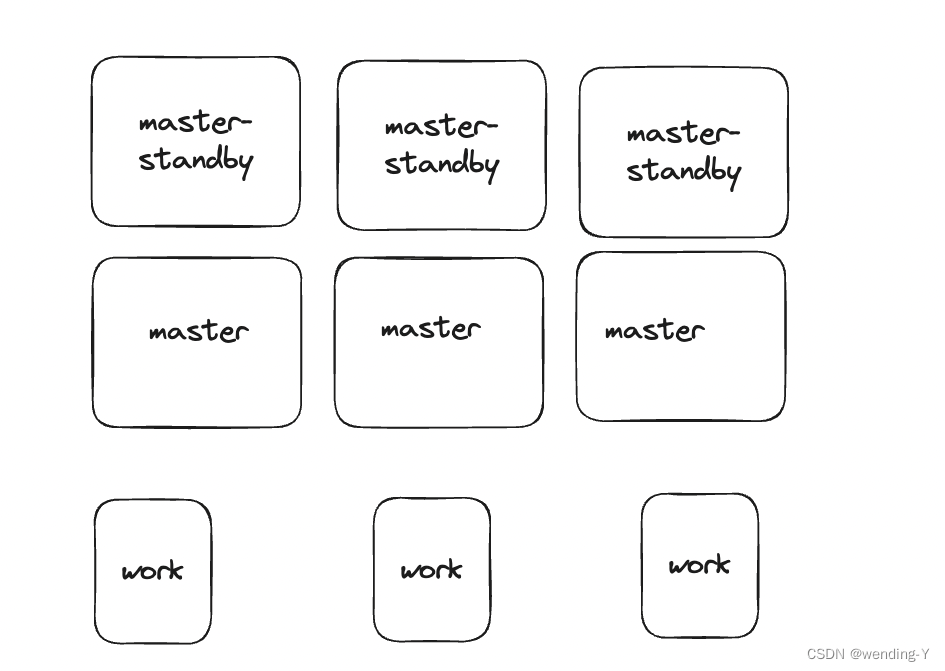
架构设计上中的master三种架构,单节点,主从节点,多节点分析
文章目录 背景单节点优点缺点 主从节点优点缺点 多节点优点缺点 多节点,多backup设计优点缺点 总结 背景 在很多分布式系统里会有master,work这种结构。 master 节点负责管理资源,分发任务。下面着重讨论下master 数量不同带来的影响 单节点 优点 1.设…...

如何在 SQL 中删除一条记录?
如何在 SQL 中删除一条记录? 在 SQL 中,您可以使用DELETE查询和WHERE子句删除表中的一条记录。在本文中,我将向您介绍如何使用DELETE查询和WHERE子句删除记录。我还将向您展示如何一次从表中删除多条记录 如何在 SQL 中使用 DELETE 这是使…...
JavaSE (Java基础):面向对象(上)
8 面向对象 面向对象编程的本质就是:以类的方法组织代码,以对象的组织(封装)数据。 8.1 方法的回顾 package com.oop.demo01;// Demo01 类 public class Demo01 {// main方法public static void main(String[] args) {int c 10…...

flink使用StatementSet降低资源浪费
背景 项目中有很多ods层(mysql 通过cannal)kafka,需要对这些ods kakfa做一些etl操作后写入下一层的kafka(dwd层)。 一开始采用的是executeSql方式来执行每个ods→dwd层操作,即类似: def main(…...
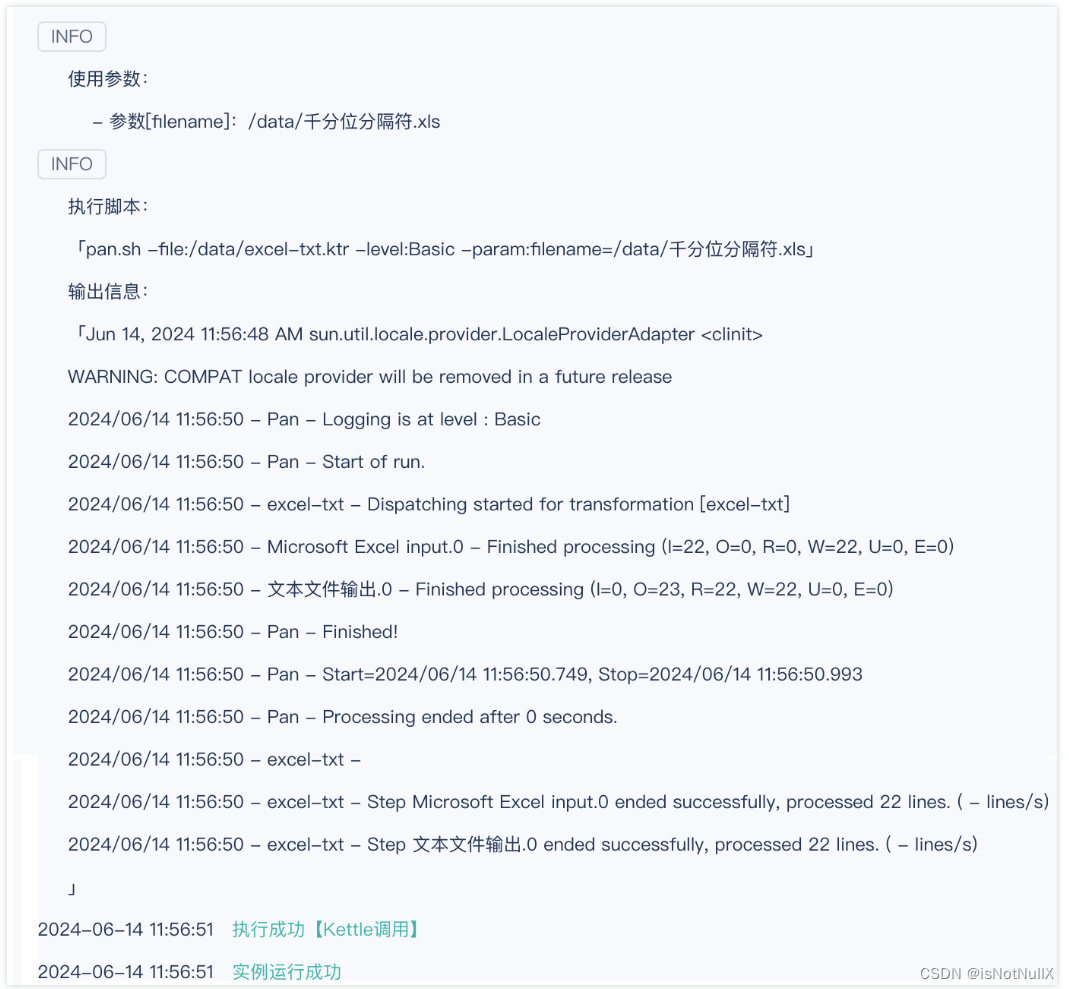
FineDataLink4.1.9支持Kettle调用
FDL更新至4.1.9后,新增kettle调用功能,支持不增加额外负担的情况下,将现有的Kettle任务平滑迁移到FineDataLink。 一、更新版本前存在的问题与痛点 在此次功能更新前,用户可能会遇到以下问题: 1.对于仅使用kettle的…...

SwanLinkOS首批实现与HarmonyOS NEXT互联互通,软通动力子公司鸿湖万联助力鸿蒙生态统一互联
在刚刚落下帷幕的华为开发者大会2024上,伴随全场景智能操作系统HarmonyOS Next的盛大发布,作为基于OpenHarmony的同根同源系统生态,软通动力子公司鸿湖万联全域智能操作系统SwanLinkOS首批实现与HarmonyOS NEXT互联互通,率先攻克基…...
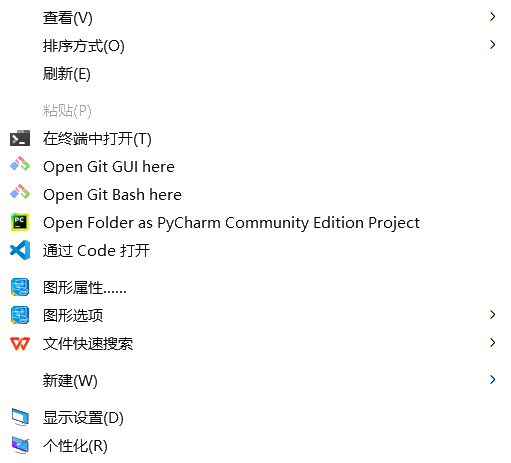
Win11禁止右键菜单折叠的方法
背景 在使用windows11的时候,会发现默认情况下,右键菜单折叠了。以至于在使用一些软件的右键菜单时总是要点击“显示更多选项”菜单展开所有菜单,然后再点击。而且每次在显示菜单时先是全部展示,再隐藏一下,看着着实难…...
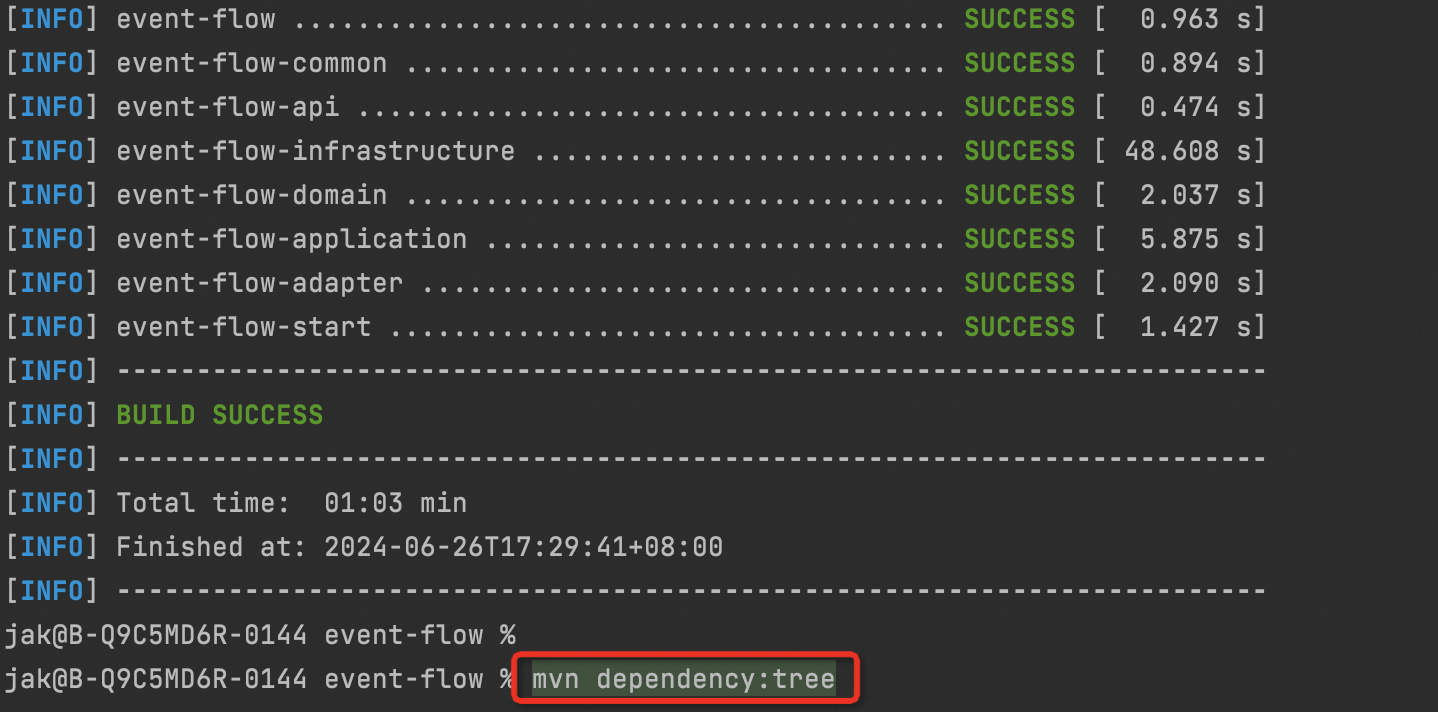
Maven列出所有的依赖树
在 IntelliJ IDEA 中,你可以使用 Maven 插件来列出项目的依赖树。Maven 插件提供了一个名为dependency:tree的目标,可以帮助你获取项目的依赖树详细信息。 要列出项目的依赖树,可以执行以下步骤: 打开 IntelliJ IDEA,…...

测试开发面试题和答案
Python 请解释Python中的列表推导式(List Comprehension)是什么,并给出一个示例。 答案: 列表推导式是Python中一种简洁的构建列表的方法。它允许从一个已存在的列表创建新列表,同时应用一个表达式来修改或选择元素。…...
llm学习-3(向量数据库的使用)
1:数据读取和加载 接着上面的常规操作 加载环境变量---》获取所有路径---》加载文档---》切分文档 代码如下: import os from dotenv import load_dotenv, find_dotenvload_dotenv(find_dotenv()) # 获取folder_path下所有文件路径,储存在…...
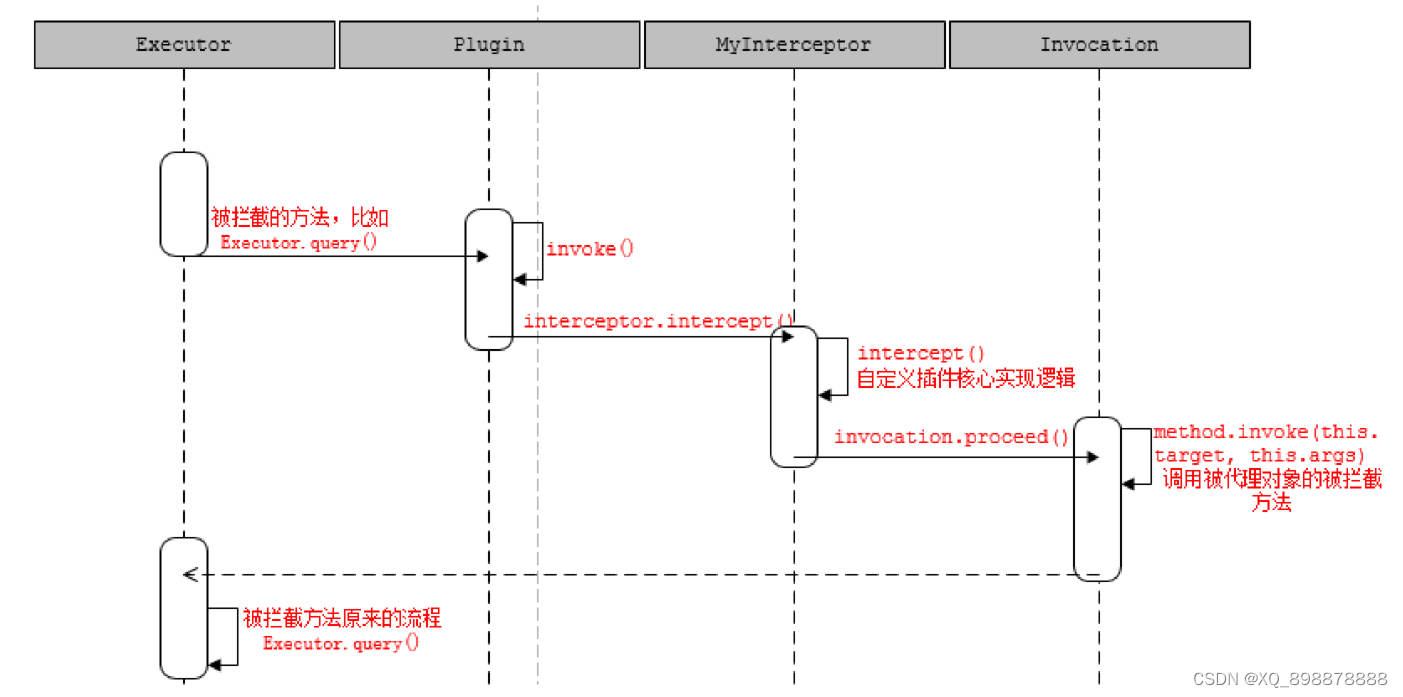
【01-02】Mybatis的配置文件与基于XML的使用
1、引入日志 在这里我们引入SLF4J的日志门面,使用logback的具体日志实现;引入相关依赖: <!--日志的依赖--><dependency><groupId>org.slf4j</groupId><artifactId>slf4j-api</artifactId><version&g…...
)
Linux-进程间通信(IPC)
进程间通信(IPC)介绍 进程间通信(IPC,InterProcess Communication)是指在不同的进程之间传播或交换信息。IPC 的方式包括管道(无名管道和命名管道)、消息队列、信号量、共享内存、Socket、Stre…...

C++ STL: std::vector与std::array的深入对比
什么是 std::vector 和 std::array 首先,让我们简要介绍一下这两种容器: • std::vector:一个动态数组,可以根据需要动态调整其大小。 • std::array:一个固定大小的数组,其大小在编译时确定。 虽然…...
哈哈看到这条消息感觉就像是打开了窗户
在这个信息爆炸的时代,每一条动态可能成为我们情绪的小小触发器。今天,当我无意间滑过那条由杜海涛亲自发布的“自曝式”消息时,不禁心头一颤——如果这是我的另一半,哎呀,那画面,简直比烧烤摊还要“热辣”…...

10、matlab中字符、数字、矩阵、字符串和元胞合并为字符串并将字符串以不同格式写入读出excel
1、前言 在 MATLAB 中,可以使用不同的数据类型(字符、数字、矩阵、字符串和元胞)合并为字符串,然后将字符串以不同格式写入 Excel 文件。 以下是一个示例代码,展示如何将不同数据类型合并为字符串,并以不…...

如何正确面对GPT-5技术突破
随着人工智能技术的快速发展,预训练语言模型在自然语言处理领域取得了显著的成果。其中,GPT系列模型作为代表之一,受到了广泛关注。2023年,GPT-5模型的发布引起了业界的热烈讨论。本文将从以下几个方面分析GPT-5的发布及其对人工智…...

HarmonyOS ArkUi 官网踩坑:单独隐藏导航条无效
环境: 手机:Mate 60 Next版本: NEXT.0.0.26 导航条介绍 导航条官网设计指南 setSpecificSystemBarEnabled 设置实际效果: navigationIndicator:隐藏导航条无效status:会把导航条和状态栏都隐藏 官方…...
)
解决跨域问题(vite、axios/koa)
两种方法选其一即可 一、后端koa设置中间件 app.use(async (ctx, next)> {ctx.set(Access-Control-Allow-Origin, *);ctx.set(Access-Control-Allow-Headers, Content-Type, Content-Length, Authorization, Accept, X-Requested-With , yourHeaderFeild);ctx.set(Access-C…...

echarts实现3D柱状图(视觉层面)
一、第一种效果 效果图 使用步骤 完整实例,copy就可直接使用 <template><div :class"className" :style"{height:height,width:width}" /> </template><script>import echarts from echartsrequire(echarts/theme/…...

[连载] C++ 零基础入门-4.C++ 键盘输入 cin 一步一步学
作者:咏方舟-长江支流 日期:2026-03-15 免费《C 零基础到底层实战-全套31篇 体系化教程》,从环境安装→基础语法 → 面向对象 → 多线程 → 智能指针 → 鸿蒙原生开发,一套打通:桌面开发 / 嵌入式 / 鸿蒙 / 高薪底层…...

AI博主实测|2026最新PPT工具合集,覆盖全场景,告别熬夜手搓
一、引言作为常年和PPT打交道的AI博主,每天都会收到粉丝提问:“做PPT用什么工具高效?”“AI能帮我快速做PPT吗?”“新手零基础,哪款工具最容易上手?”其实PPT工具没有“最好”,只有“最适配”—…...

如何实现Pyecharts自定义事件处理:从前端到后端的完整联动指南
如何实现Pyecharts自定义事件处理:从前端到后端的完整联动指南 【免费下载链接】pyecharts 🎨 Python Echarts Plotting Library 项目地址: https://gitcode.com/gh_mirrors/py/pyecharts Pyecharts是一款强大的Python数据可视化库,它…...

OFA图像描述模型部署案例:中小企业低成本GPU算力下高效运行WebUI
OFA图像描述模型部署案例:中小企业低成本GPU算力下高效运行WebUI 模型简介:iic/ofa_image-caption_coco_distilled_en是基于OFA架构的蒸馏版图像描述模型,专门针对COCO数据集优化,能够在通用视觉场景中生成简洁准确的英文描述&…...

Gemma-3-12b-it非遗保护应用:古籍插图识别+文言文内容转述案例
Gemma-3-12b-it非遗保护应用:古籍插图识别文言文内容转述案例 1. 项目背景与价值 古籍保护是文化遗产数字化的重要课题。传统古籍包含大量珍贵插图和文言文内容,但面临两大挑战: 插图内容难以被现代人理解文言文表述晦涩难懂 Gemma-3-12b…...

2025年智能座舱交互革命:从语音助手到多模态AI中枢
1. 告别“人工智障”:为什么你的车载语音助手总在关键时刻掉链子? 不知道你有没有过这样的经历:开车时想调低空调温度,对着车机喊了好几声“你好,XX”,它要么没反应,要么答非所问,最…...

【 Windows 操作系统】.bat 与 .ps1 的区别和作用
很多人“会用脚本”,但说不清脚本。 真正的差距,往往从 bat 和 ps1 的理解深度 开始拉开。一、为什么 Windows 会同时存在 .bat 和 .ps1?这是一个历史 架构演进的问题。.ps1 是 PowerShell 脚本文件的扩展名,用于编写和执行 Powe…...

Phi-3-mini-128k-instruct效果对比:4K vs 128K上下文在法律条款解析中的差异
Phi-3-mini-128k-instruct效果对比:4K vs 128K上下文在法律条款解析中的差异 1. 模型简介 Phi-3-Mini-128K-Instruct是一个38亿参数的轻量级开放模型,属于Phi-3系列的最新成员。该模型经过专门训练,能够处理长达128K token的上下文窗口&…...

qKnow 知识平台核心能力解析|第 02 期:非结构化数据的知识图谱自动化抽取能力全景
在企业知识建设过程中,90% 以上的信息都以非结构化形式存在:文档、制度、报告、网页、说明书…… 这些内容信息密度高,却长期沉睡在文件系统中,难以被计算、难以被复用,更难支撑智能应用。 本期《qKnow 知识平台核心能…...

comsol连续移动激光抛光,采用固体传热+层流+动网格实现,包含表面张力和马兰戈尼效应
comsol连续移动激光抛光,采用固体传热层流动网格实现,包含表面张力和马兰戈尼效应激光抛光中的熔池动力学总是让人着迷。今天咱们来聊聊怎么用COMSOL实现带移动激光的热-流耦合仿真,重点是把表面张力和马兰戈尼效应这对好基友装进模型里。先上…...