02:项目二:感应开关盖垃圾桶
感应开关盖垃圾桶
- 1、PWM开发SG90
- 1.1、怎样通过C51单片机输出PWM波?
- 1.2、通过定时器输出PWM波来控制SG90
- 2、超声波测距模块的使用
- 3、感应开关盖垃圾桶
需要材料:
1、SG90舵机模块
2、HC-SR04超声波模块
3、震动传感器
4、蜂鸣器
5、若干杜邦线
1、PWM开发SG90
- PWM波为脉冲宽度调制,对模拟信号电平进行数字编码。通过调节占空比的变化来调节信号。
- 占空比:高电平的时间/整个信号的周期。
1.1、怎样通过C51单片机输出PWM波?
如果芯片内部模块能集成输出,一般观察手册或者芯片IO口都会标明这个是否是PWM口
如果没有集成PWM功能,可以通过IO口软件模拟,
1.2、通过定时器输出PWM波来控制SG90

如图为SG90舵机模块,黄色为PWM信号控制,红色和褐色分别为VCC和GND。当输入的PWM的占空比不同的时候,舵机模块的摆头幅度不同。一般情况如下:
- PWM波的频率不能太高,大约50HZ,即周期=1/频率=1/50=0.02s,20ms左右
0.5ms-------------0度; 2.5% 对应1/40,
1.0ms------------45度; 5.0% 对应2/40
1.5ms------------90度; 7.5% 对应3/40
2.0ms-----------135度; 10.0% 对应4/40
2.5ms-----------180度; 12.5% 对应5/40
接下来通过C51单片机输出PWM波控制舵机的摆头(黄线连接P1.1口)代码如下:
#include <REGX52.H>sbit sg_90 = P1^1;//黄线连接P1.1口
int cnt = 0; //标志位
int jd; //占空比的分子void Delay300ms() //@11.0592MHz
{unsigned char i, j, k;i = 3;j = 26;k = 223;do{do{while (--k);} while (--j);} while (--i);
}void Delay2000ms() //@11.0592MHz
{unsigned char i, j, k;i = 15;j = 2;k = 235;do{do{while (--k);} while (--j);} while (--i);
}void Timer0_Init(void)
{TMOD = 0x01;//配置定时器T0为16位定时器TL0 = 0x33; //定时器计1个数为1.085us,则当舵机为0度的时候,需要0.5ms, TH0 = 0xFE; //则定一个0.5ms的定时器TF0 = 0; //清除TF0标志TR0 = 1; //定时器0开始计时ET0 = 1;EA = 1;
}void main(void)
{ Delay300ms();//给硬件准备时间Timer0_Init();jd = 1;//一上电,开始占空比为1/40,为0度cnt = 0;sg_90 = 1;//先给输出引脚一个高电平while(1){//角度由135度到0度来回摆动jd = 4;cnt = 0;Delay2000ms();jd = 1;cnt = 0;Delay2000ms();}
}void Timer0_Handler() interrupt 1//中断函数
{cnt++;TL0 = 0x33; TH0 = 0xFE;//控制PWM波的占空比if(cnt < jd){sg_90 = 1;}else{sg_90 = 0;}if(cnt == 40){cnt = 0;sg_90 = 1;}
}
2、超声波测距模块的使用

- 怎么让它发送波
Trig ,给Trig端口至少10us的高电平 - 怎么知道它开始发了
Echo信号,由低电平跳转到高电平,表示开始发送波 - 怎么知道接收了返回波
Echo,由高电平跳转回低电平,表示波回来了 - 怎么算时间
Echo引脚维持高电平的时间!
波发出去的那一下,开始启动定时器。波回来的那一下,我们开始停止定时器,计算出中间经过多少时间。距离 = 速度 (340m/s)* 时间/2

/*通过超声波模块控制LED1灯的亮灭,当手靠近超声波模块时,灯亮*/
#include <REGX52.H>sbit Trig = P1^5;
sbit Echo = P1^6;
sbit LED1 = P3^7;void Delay10us() //@11.0592MHz
{unsigned char i;i = 2;while (--i);
}void Timer0_Init(void)
{TMOD = 0x01;TL0 = 0;TH0 = 0;//设置定时器T0从0开始数数
}void Delay200ms() //@11.0592MHz
{unsigned char i, j, k;i = 2;j = 103;k = 147;do{do{while (--k);} while (--j);} while (--i);
}void main(void)
{double time;double dis;Timer0_Init();while(1){Delay200ms();//先给单片机准备时间//1、开始发波Trig = 0;Trig = 1;Delay10us();Trig = 0;//2、检测ECHO引脚电平while(Echo == 0);TR0 = 1; //启动定时器while(Echo == 1);TR0 = 0; //关闭定时器//3、计算定时开到定时关的时间(计算数的个数),//2位二进制11,01。合并位1101怎么算?1101为(11*2^2)+01=13time = (TH0 * 256 + TL0) * 1.085; //us为单位//34000cm/s = 34cm/ms = 0.034cm/usdis = time * 0.017; //cm为单位if(dis < 10){LED1 = 0;}else{LED1 = 1;}TL0 = 0;TH0 = 0;//定时器清零,以便下次测距}
}
代码优化②:
/**优化:将定时器0改为定时器1,然后将超声波测距封装成为一个函数*/
#include <REGX52.H>sbit Trig = P1^5;
sbit Echo = P1^6;
sbit LED1 = P3^7;void Delay10us() //@11.0592MHz
{unsigned char i;i = 2;while (--i);
}void Delay200ms() //@11.0592MHz
{unsigned char i, j, k;i = 2;j = 103;k = 147;do{do{while (--k);} while (--j);} while (--i);
}void Timer1_Init(void)
{//使用定时器1TMOD &= 0x0F;TMOD |= 0x10;TL1 = 0;TH1 = 0;//设置定时器T1从0开始数数
}double get_distance()//超声波获得距离的函数
{double time;TL1 = 0;TH1 = 0;//定时器清零,以便下次测距//1、开始发波Trig = 0;Trig = 1;Delay10us();Trig = 0;//2、检测ECHO引脚电平while(Echo == 0);TR1 = 1; //启动定时器while(Echo == 1);TR1 = 0; //关闭定时器//3、计算定时开到定时关的时间(计算数的个数),//2位二进制11,01。合并位1101怎么算?1101为(11*2^2)+01=13time = (TH1 * 256 + TL1) * 1.085; //us为单位//34000cm/s = 34cm/ms = 0.034cm/usreturn (time * 0.017); //cm为单位;
}void main(void)
{double dis;Timer1_Init();while(1){Delay200ms();//先给单片机准备时间dis = get_distance();if(dis < 10){LED1 = 0;}else{LED1 = 1;}}
}
3、感应开关盖垃圾桶
舵机和超声波代码整合,舵机用定时器0,超声波用定时器1。
1、实现物体靠近后,自动开盖,2秒后关盖。
2、查询的方式添加按键控制
3、 查询的方式添加震动控制
#include <REGX52.H>sbit SW1 = P2^1;//按键SW1连接的是P2.1口
sbit Trig = P1^5;
sbit Echo = P1^6;
sbit LED1 = P3^7;
sbit sg_90 = P1^1;//黄线连接P1.1口
sbit vibrate = P3^2;//震动传感器连接P3.2口,使用外部中断0int cnt = 0; //标志位
int jd; //占空比的分子
int vib_mark; //震动传感器的标志位void Delay10us() //@11.0592MHz
{unsigned char i;i = 2;while (--i);
}void Delay200ms() //@11.0592MHz
{unsigned char i, j, k;i = 2;j = 103;k = 147;do{do{while (--k);} while (--j);} while (--i);
}void Delay2000ms() //@11.0592MHz
{unsigned char i, j, k;i = 15;j = 2;k = 235;do{do{while (--k);} while (--j);} while (--i);
}void EX0_Init()//触发中断0初始化
{EX0 = 1;EA = 1;IT0 = 0;//低电平触发
}void Timer0_Init(void)//定时器T0中断初始化
{TMOD &= 0xF0;//配置定时器T0为16位定时器TMOD |= 0x01;TL0 = 0x33; //定时器计1个数为1.085us,则当舵机为0度的时候,需要0.5ms, TH0 = 0xFE; //则定一个0.5ms的定时器TF0 = 0; //清除TF0标志TR0 = 1; //定时器0开始计时ET0 = 1;EA = 1;
}void Timer1_Init(void)//定时器T1初始化
{//使用定时器1TMOD &= 0x0F;TMOD |= 0x10;TL1 = 0;TH1 = 0;//设置定时器T1从0开始数数
}double get_distance()
{double time;TL1 = 0;TH1 = 0;//定时器清零,以便下次测距//1、开始发波Trig = 0;Trig = 1;Delay10us();Trig = 0;//2、检测ECHO引脚电平while(Echo == 0);TR1 = 1; //启动定时器while(Echo == 1);TR1 = 0; //关闭定时器//3、计算定时开到定时关的时间(计算数的个数),//2位二进制11,01。合并位1101怎么算?1101为(11*2^2)+01=13time = (TH1 * 256 + TL1) * 1.085; //us为单位//34000cm/s = 34cm/ms = 0.034cm/usreturn (time * 0.017); //cm为单位;
}void sg90_0(void) //舵机0度
{sg_90 = 1;//先给输出引脚一个高电平jd = 1;//一上电,开始占空比为1/40,为0度cnt = 0;
}void sg90_90(void)//舵机90度
{sg_90 = 1;//先给输出引脚一个高电平jd = 3;//一上电,开始占空比为3/40,为90度cnt = 0;
}void main(void)
{double dis;Timer0_Init();Timer1_Init();EX0_Init();sg90_0();while(1){Delay200ms();//先给单片机准备时间dis = get_distance();if(dis < 10 || SW1 == 0 || vib_mark == 1){vib_mark = 0;LED1 = 0;sg90_90();Delay2000ms();}else{LED1 = 1;sg90_0();Delay200ms();} }
}void Timer0_Handler() interrupt 1//中断函数
{cnt++;TL0 = 0x33; TH0 = 0xFE;//控制PWM波的占空比if(cnt < jd){sg_90 = 1;}else{sg_90 = 0;}if(cnt == 40){cnt = 0;sg_90 = 1;}
}void EX0_Handler() interrupt 0//触发中断0函数
{vib_mark = 1;
}
为什么我们使用震动传感器控制的时候不直接if(dis < 10 || SW1 == 0 || vibrate== 0)喃?这样判断不是跟简单吗?原因:因为震动传感器因为震动而发出的低电平0不仅微弱,而且时间比较断。当震动传感器给出低电平的时候,而单片机还在执Delay2000ms();而当进入判断的时候,可能震动传感器发出的低电平已经消失了,已经变成高电平了。这样就会导致震动传感器不灵敏。所以,通过外部中断来改变标志位,这样就会规避这个问题。当震动时,触发中断,标志位变为1,等待判断。只有进入判断后标志位才变回0。
相关文章:
02:项目二:感应开关盖垃圾桶
感应开关盖垃圾桶 1、PWM开发SG901.1、怎样通过C51单片机输出PWM波?1.2、通过定时器输出PWM波来控制SG90 2、超声波测距模块的使用3、感应开关盖垃圾桶 需要材料: 1、SG90舵机模块 2、HC-SR04超声波模块 3、震动传感器 4、蜂鸣器 5、若干杜邦线 1、PWM开…...

eNsp公司管理的网络NAT策略搭建
实验拓扑图 实验需求: 7,办公区设备可以通过电信链路和移动链路上网(多对多的NAT,并且需要保留一个公网IP不能用来转换) 8,分公司设备可以通过总公司的移动链路和电信链路访问到Dmz区的http服务器 9,多出口环境基于带…...

MUR2060CTR-ASEMI无人机专用MUR2060CTR
编辑:ll MUR2060CTR-ASEMI无人机专用MUR2060CTR 型号:MUR2060CTR 品牌:ASEMI 封装:TO-220 批号:最新 最大平均正向电流(IF):20A 最大循环峰值反向电压(VRRM&#…...
Manim的代码练习02:在manim中Dot ,Arrow和NumberPlane对象的使用
Dot:指代点对象或者表示点的符号。Arrow:指代箭头对象,包括直线上的箭头或者向量箭头等。NumberPlane:指代数轴平面对象,在Manim中用来创建包含坐标轴的数学坐标系平面。Text:指代文本对象,用来…...
)
datawhale - 基于术语词典干预的机器翻译挑战赛 (一)
文章目录 torchtext 库是干什么用的 ?TranslationDataset 类定义 Seq2Seq模型EncoderDecoderSeq2Seq 类 load_terminology_dictionary 函数示例用法 train 函数主程序代码模型评价load_sentences 函数translate_sentence 函数evaluate_bleu 函数主程序 测试集上进行…...

【JavaScript脚本宇宙】提升用户体验:探索 JavaScript 命令行界面开发工具
构建交互式命令行:JavaScript 中的 CLI 开发利器 前言 在现代软件开发中,命令行界面(CLI)和终端应用程序的开发变得越来越重要。为了提高用户体验和交互性,使用合适的工具和库是至关重要的。本文将介绍一些用于构建命…...

ubuntu18.04安装显卡驱动后无法进入桌面的解决办法
我没有尝试完美恢复的方法,只尝试了卸载nvidia显卡的方法 1.第一步 进 安开机键进入 1 开机进入 选项界面,选择高级模式(ubuntu 高级选项) 2.第二步 进去以后选择一个括号里面带recovery mode的选项,数字选最高最大的。 3.然后…...

javaScript的面试重点--预解析
目录 一.前言 二.预解析案例 一.前言 关于预解析,我们通过今天学习就能够知道解析器运行JS分为哪两步;能够说出变量提升的步骤和运行过程;能够说出函数提升的步骤和运行过程。 二.预解析案例 预解析,简而言之,也就是…...

Gitea 仓库事件触发Jenkins远程构建
文章目录 引言I Gitea 仓库事件触发Jenkins远程构建1.1 Jenkins配置1.2 Gitea 配置引言 应用场景:项目部署 I Gitea 仓库事件触发Jenkins远程构建 Gitea支持用于仓库事件的Webhooks 1.1 Jenkins配置 高版本Jenkins需要关闭跨域限制和开启匿名用户访问 在Jenkins启动前加入…...

springboot+vue 开发记录(九)后端打包部署运行
本篇文章主要内容是后端项目写好了,怎么打包部署到服务器上运行。 文章目录 1. 在服务器上安装Docker2. 在Docker中装MySQL3. 在Docker中设置网桥,实现容器间的网络通信4. 修改后端配置文件5. 修改pom.xml文件6. 打包7. 编写DockerFile文件8. 上传文件到…...

昇思25天学习打卡营第20天 | 基于MindNLP+MusicGen生成自己的个性化音乐
基于MindNLPMusicGen生成个性化音乐 实验简介 MusicGen是Meta AI提出的音乐生成模型,能够根据文本描述或音频提示生成高质量音乐。该模型基于Transformer结构,分为三个阶段:文本编码、音频token预测和音频解码。此实验将演示如何使用MindSpo…...

windows USB 设备驱动开发-USB主控制开发(一)
下面介绍主机驱动程序开发的高级概念和任务。 如果你正在编写与 Microsoft 提供的 USB 主机控制器扩展驱动程序 (Ucx01000.sys) 通信的新主机控制器驱动程序,则这部分内容适用于你。 下面是 Windows 中 USB 主机端驱动程序中显示的图表的修改版本。 此版本隐藏 USB…...
)
Dubbo 负载均衡(Load Balance)
在分布式系统中,负载均衡是确保系统高效稳定运行的关键技术之一。Dubbo 作为一款高性能的 RPC 框架,提供了多种负载均衡策略以满足不同场景的需求。本文将深入介绍 Dubbo 中常用的几种负载均衡策略:随机(Random)、轮询…...
几何 3 点)
ArcGIS Pro SDK (九)几何 3 点
ArcGIS Pro SDK (九)几何 3 点 文章目录 ArcGIS Pro SDK (九)几何 3 点1 构造地图点2 地图点生成器属性3 地图点的相等性4 缩放至指定点 环境:Visual Studio 2022 .NET6 ArcGIS Pro SDK 3.0 1 构造地图点 // 使用生…...

基于神经网络的分类和预测
基于神经网络的分类和预测 一、基础知识(一)引言(二)神经网络的基本概念(1)神经网络(2)神经元(3)常用的激活函数(非线性映射函数)&…...

VR头显如何低延迟播放8K的RTSP|RTMP流
技术背景 我们在做Unity平台RTSP、RTMP播放器的时候,有公司提出来这样的技术需求,希望在头显播放全景的8K RTSP|RTMP直播流,8K的数据,对头显和播放器,都提出了新的要求,我们从几个方面,探讨下V…...

2、ASPX、.NAT(环境/框架)安全
ASPX、.NAT(环境/框架)安全 源自小迪安全b站公开课 1、搭建组合: WindowsIISaspxsqlserver .NAT基于windows C开发的框架/环境 对抗Java xx.dll <> xx.jar 关键源码封装在dll文件内。 2、.NAT配置调试-信息泄露 功能点…...

在家上网IP地址是固定的吗?
在数字化时代,互联网已成为我们日常生活中不可或缺的一部分。无论是工作、学习还是娱乐,我们都离不开网络的支持。然而,当我们在家中接入互联网时,可能会产生这样一个疑问:在家上网IP地址是固定的吗?下面一…...

交换机和路由器的工作流程
1、交换机工作流程: 将接口中的电流识别为二进制,并转换成数据帧,交换机会记录学习该数据帧的源MAC地址,并将其端口关联起来记录在MAC地址表中。然后查看MAC地址表来查找目标MAC地址,会有一下一些情况: MA…...

算法笔记——LCR
一.LCR 152. 验证二叉搜索树的后序遍历序列 题目描述: 给你一个二叉搜索树的后续遍历序列,让你判断该序列是否合法。 解题思路: 根据二叉搜索树的特性,二叉树搜索的每一个结点,大于左子树,小于右子树。…...
)
rknn优化教程(二)
文章目录 1. 前述2. 三方库的封装2.1 xrepo中的库2.2 xrepo之外的库2.2.1 opencv2.2.2 rknnrt2.2.3 spdlog 3. rknn_engine库 1. 前述 OK,开始写第二篇的内容了。这篇博客主要能写一下: 如何给一些三方库按照xmake方式进行封装,供调用如何按…...

五年级数学知识边界总结思考-下册
目录 一、背景二、过程1.观察物体小学五年级下册“观察物体”知识点详解:由来、作用与意义**一、知识点核心内容****二、知识点的由来:从生活实践到数学抽象****三、知识的作用:解决实际问题的工具****四、学习的意义:培养核心素养…...
HBuilderX安装(uni-app和小程序开发)
下载HBuilderX 访问官方网站:https://www.dcloud.io/hbuilderx.html 根据您的操作系统选择合适版本: Windows版(推荐下载标准版) Windows系统安装步骤 运行安装程序: 双击下载的.exe安装文件 如果出现安全提示&…...

(转)什么是DockerCompose?它有什么作用?
一、什么是DockerCompose? DockerCompose可以基于Compose文件帮我们快速的部署分布式应用,而无需手动一个个创建和运行容器。 Compose文件是一个文本文件,通过指令定义集群中的每个容器如何运行。 DockerCompose就是把DockerFile转换成指令去运行。 …...
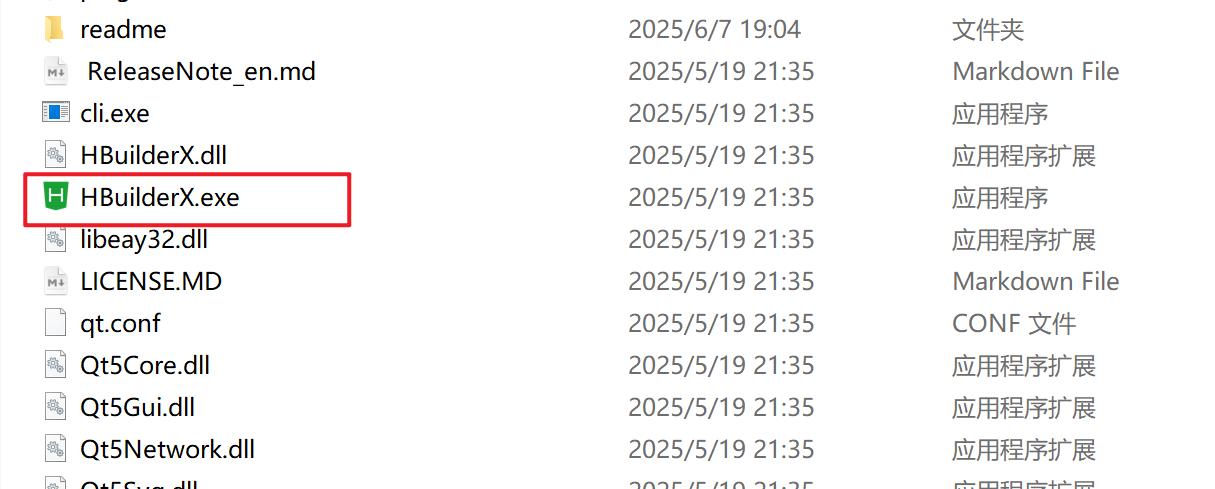
让回归模型不再被异常值“带跑偏“,MSE和Cauchy损失函数在噪声数据环境下的实战对比
在机器学习的回归分析中,损失函数的选择对模型性能具有决定性影响。均方误差(MSE)作为经典的损失函数,在处理干净数据时表现优异,但在面对包含异常值的噪声数据时,其对大误差的二次惩罚机制往往导致模型参数…...

【笔记】WSL 中 Rust 安装与测试完整记录
#工作记录 WSL 中 Rust 安装与测试完整记录 1. 运行环境 系统:Ubuntu 24.04 LTS (WSL2)架构:x86_64 (GNU/Linux)Rust 版本:rustc 1.87.0 (2025-05-09)Cargo 版本:cargo 1.87.0 (2025-05-06) 2. 安装 Rust 2.1 使用 Rust 官方安…...

JS手写代码篇----使用Promise封装AJAX请求
15、使用Promise封装AJAX请求 promise就有reject和resolve了,就不必写成功和失败的回调函数了 const BASEURL ./手写ajax/test.jsonfunction promiseAjax() {return new Promise((resolve, reject) > {const xhr new XMLHttpRequest();xhr.open("get&quo…...
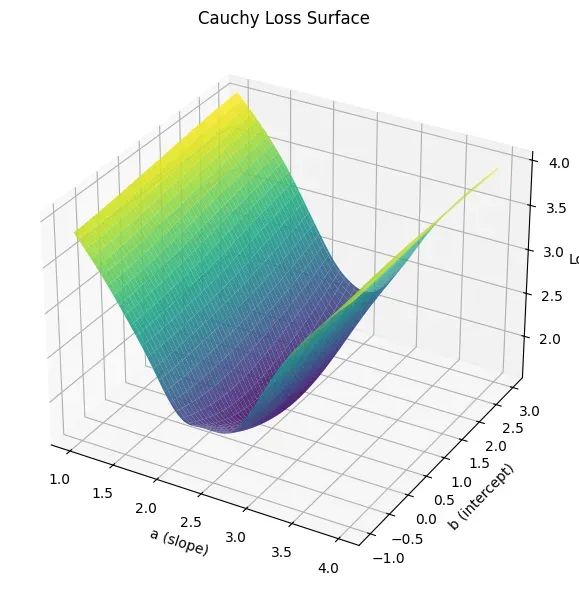
搭建DNS域名解析服务器(正向解析资源文件)
正向解析资源文件 1)准备工作 服务端及客户端都关闭安全软件 [rootlocalhost ~]# systemctl stop firewalld [rootlocalhost ~]# setenforce 0 2)服务端安装软件:bind 1.配置yum源 [rootlocalhost ~]# cat /etc/yum.repos.d/base.repo [Base…...
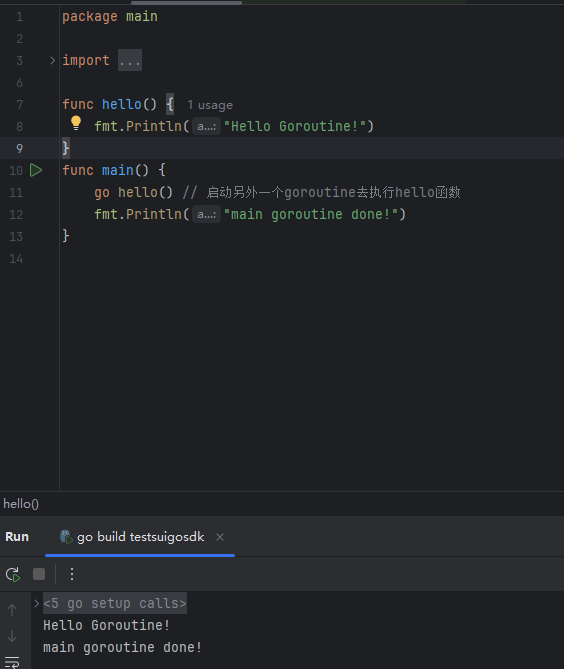
GO协程(Goroutine)问题总结
在使用Go语言来编写代码时,遇到的一些问题总结一下 [参考文档]:https://www.topgoer.com/%E5%B9%B6%E5%8F%91%E7%BC%96%E7%A8%8B/goroutine.html 1. main()函数默认的Goroutine 场景再现: 今天在看到这个教程的时候,在自己的电…...
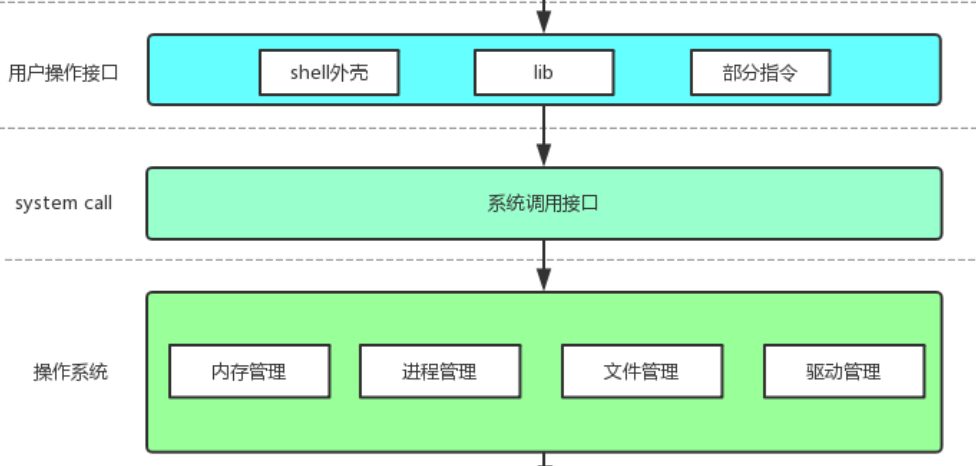
【Linux手册】探秘系统世界:从用户交互到硬件底层的全链路工作之旅
目录 前言 操作系统与驱动程序 是什么,为什么 怎么做 system call 用户操作接口 总结 前言 日常生活中,我们在使用电子设备时,我们所输入执行的每一条指令最终大多都会作用到硬件上,比如下载一款软件最终会下载到硬盘上&am…...