uboot 设置bootargs配置内核网络挂载根文件系统
uboot 设置bootargs配置内核网络挂载根文件系统
uboot设置bootargs
env set bootargs "mem=256M console=ttyAMA0,115200 root=/dev/nfs init=/linuxrc nfsroot=nfs主机地址:nfs路径/busybox/rootfs_glibc_arm64,proto=tcp rw nfsvers=3 rootwait ip=板子地址:nfs主机地址:网关:255.255.255.0::eth0:off"
saveenv

内核配置:






遇到问题如下:
问题一: bootargs 没有ip这里写错了
问题二: 不是nfs路径cat /etc/exports 修改该路径重启nfs:sudo /etc/init.d/nfs-kernel-server restartxxxx/rootfs_glibc_arm64 *(rw,sync,no_root_squash,no_subtree_check) 问题三: 内核没有使能nfs
问题四:当前ubuntu系统nfs版本和板子nfs挂载的不支持 1. 修改 NFS 配置文件:2. sudo vim /etc/default/nfs-kernel-server3. 末尾增加: RPCNFSDOPTS="--nfs-version 2,3,4 --debug --syslog"4. sudo /etc/init.d/nfs-kernel-server restart[ 101.800373] VFS: Unable to mount root fs via NFS, trying floppy.
[ 101.807335] VFS: Cannot open root device "nfs" or unknown-block(2,0): error -6
[ 101.814718] Please append a correct "root=" boot option; here are the available partitions:
[ 101.823160] 0100 65536 ram0 (driver?)
[ 101.827880] 0101 65536 ram1 (driver?)
[ 101.832573] 0102 65536 ram2 (driver?)
[ 101.837347] 0103 65536 ram3 (driver?)
[ 101.841988] 0104 65536 ram4 (driver?)
[ 101.846695] 0105 65536 ram5 (driver?)
[ 101.851335] 0106 65536 ram6 (driver?)
[ 101.856027] 0107 65536 ram7 (driver?)
[ 101.860667] 0108 65536 ram8 (driver?)
[ 101.865333] 0109 65536 ram9 (driver?)
[ 101.869974] 010a 65536 ram10 (driver?)
[ 101.874720] 010b 65536 ram11 (driver?)
[ 101.879446] 010c 65536 ram12 (driver?)
[ 101.884194] 010d 65536 ram13 (driver?)
[ 101.888922] 010e 65536 ram14 (driver?)
[ 101.893669] 010f 65536 ram15 (driver?)
[ 101.898410] b300 15273984 mmcblk0 driver: mmcblk
[ 101.903768] b301 15269888 mmcblk0p1 9be55837-01
[ 101.909104] b308 7634944 mmcblk1 driver: mmcblk
[ 101.914503] b309 131072 mmcblk1p1 5edd22ea-01
[ 101.919862] b30a 7493632 mmcblk1p2 5edd22ea-02
[ 101.925247] b320 512 mmcblk1rpmb (driver?)
[ 101.930494] b318 4096 mmcblk1boot1 (driver?)
[ 101.935857] b310 4096 mmcblk1boot0 (driver?)
[ 101.941192] Kernel panic - not syncing: VFS: Unable to mount root fs on unknown-block(2,0)
[ 101.949470] ---[ end Kernel panic - not syncing: VFS: Unable to mount root fs on unknown-block(2,0)
[ 112.942790] random: nonblocking pool is initialized 最终成功:


相关文章:
uboot 设置bootargs配置内核网络挂载根文件系统
uboot 设置bootargs配置内核网络挂载根文件系统 uboot设置bootargs env set bootargs "mem256M consolettyAMA0,115200 root/dev/nfs init/linuxrc nfsrootnfs主机地址:nfs路径/busybox/rootfs_glibc_arm64,prototcp rw nfsvers3 rootwait ip板子地址:nfs主机地址:网关:2…...

Vue3+.NET6前后端分离式管理后台实战(三十一)
1,Vue3.NET6前后端分离式管理后台实战(三十一)...

22集 如何minimax密钥和groupid-《MCU嵌入式AI开发笔记》
22集 如何获取minimax密钥和groupid-《MCU嵌入式AI开发笔记》 minimax密钥获取 https://www.minimaxi.com/platform 进入minimax网站,注册登录后,进入“账户管理”, 然后再点击“接口密钥”,然后再点击“创建新的密钥”。 之…...

决策树的概念
决策树的概念 决策树是一种监督学习算法,主要用于分类任务。它通过构建一棵树结构模型来进行预测,其中每个内部节点表示一个特征属性上的判断条件,每条边代表一个判断结果对应的分支,而叶节点则代表最终的类别标签。 应用领域 …...

C++《类和对象》(中)
一、 类的默认成员函数介绍二、构造函数 构造函数名与类同名内置类型与自定义类型析构函数拷贝构造函数 C《类和对象》(中) 一、 类的默认成员函数介绍 默认成员函数就是⽤⼾没有显式实现,编译器会⾃动⽣成的成员函数称为默认成员函数。 那么我们主要学习的是1&…...

SpringBoot中JSR303校验
JSR是 Java EE 的一种标准,用于基于注解的对象数据验证。在Spring Boot应用中,你可以通过添加注解直接在POJO类中声明验证规则。这样可以确保在使用这些对象进行操作之前,它们满足业务规则。个人认为非常有用的,因为它减少了代码中…...

图像数据增强方法概述
图像数据增强方法概述 1. 什么是图像数据增强技术?2. 图像数据增强技术分类2.1 几何变换Python 示例代码 2.2 颜色变换2.3 噪声添加 3. 参考文献 1. 什么是图像数据增强技术? 基础概念:图像增强技术是计算机视觉和图像处理领域中的一个关键技术,主要用…...

【学习笔记】无人机系统(UAS)的连接、识别和跟踪(五)-无人机跟踪
目录 引言 5.3 无人机跟踪 5.3.1 无人机跟踪模型 5.3.2 无人机位置报告流程 5.3.3 无人机存在监测流程 引言 3GPP TS 23.256 技术规范,主要定义了3GPP系统对无人机(UAV)的连接性、身份识别、跟踪及A2X(Aircraft-to-Everyth…...

分享从零开始学习网络设备配置--任务6.1 实现计算机的安全接入
项目描述 随着网络技术的发展和应用范围的不断扩大,网络已经成为人们日常生活中必不可少的一部分。园区网作为给终端用户提供网络接入和基础服务的应用环境,其存在的网络安全隐患不断显现出来,如非人为的或自然力造成的故障、事故;…...

双向链表(C语言版)
1. 双向链表的结构 注意:这里的“带头”跟单链表的“头结点”是两个概念,实际上在单链表阶段称呼不太严谨,但是为了更好地理解就直接称为单链表的头结点。带头链表里的头结点,实际为“哨兵位”,哨兵位结点不存储任何有…...

【算法/学习】前缀和差分
前缀和&&差分目录 1. 前缀和的概念及作用 🌈概念 🌈用途 🌙一维前缀和 🌙二维前缀和 2. 差分的概念及用途 🌈概念: 🌈用途 🌙一维差分 🌙二维差分 1. …...

idea Project 不显示文件和目录
idea Project 不显示文件和目录 File - Close Project - 重新打开项目即可删除.idea文件夹,重新打开项目即可。 原因分析: 可能与使用不同ide例如java、python打开同一项目有关 参考: https://blog.csdn.net/hgnuxc_1993/article/details/132595900 解决打开IDE…...

Linux--Socket编程预备
目录 1. 理解源 IP 地址和目的 IP 地址 2.端口号 2.1端口号(port)是传输层协议的内容 2.2端口号范围划分 2.3理解 "端口号" 和 "进程 ID" 2.4理解 socket 3.传输层的典型代表 3.1认识 TCP 协议 3.2认识 UDP 协议 4. 网络字节序 5. socket 编程接…...

100个python的基本语法知识【下】
50. 压缩文件: import zipfilewith zipfile.ZipFile("file.zip", "r") as zip_ref:zip_ref.extractall("extracted")51. 数据库操作: import sqlite3conn sqlite3.connect("my_database.db") cursor conn.c…...

Git如何将一个分支上的修改转移到另一个分支
在我们使用git进行版本控制时,当代码写错分支,怎么将这些修改转移到正确的分支上去呢?这时,我们可以使用git stath命令来暂存我们的修改,然后再切换到其他分支 未commit(提交)操作时 1. 先将修…...

jvm-证明cpu指令是乱序执行的案例
package jvm;/*** 证明cpu指令是乱序执行的** author 1* version 1.0* description: TODO* date 2024-07-19 9:31*/ public class T04_Disorder {private static int x 0, y 0;private static int a 0, b 0;public static void main(String[] args) throws InterruptedExcep…...

《流程引擎原理与实践》开源电子书
流程引擎原理与实践 电子书地址:https://workflow-engine-book.shuwoom.com 第一部分:流程引擎基础 1 引言 1.1 流程引擎介绍 1.2 流程引擎技术的发展历程 1.3 相关产品国内外发展现状 1.4 本书的内容和结构安排 2 概念 2.1 基础概念 2.2 进阶…...

谷粒商城实战笔记-52~53-商品服务-API-三级分类-新增-修改
文章目录 一,52-商品服务-API-三级分类-新增-新增效果完成1,点击Append按钮,显示弹窗2,测试完整代码 二,53-商品服务-API-三级分类-修改-修改效果完成1,添加Edit按钮并绑定事件2,修改弹窗确定按…...

uni-app 影视类小程序开发从零到一 | 开源项目分享
引言 在数字娱乐时代,对于电影爱好者而言,随时随地享受精彩影片成为一种日常需求。分享一款基于 uni-app 开发的影视类小程序。它不仅提供了丰富的影视资源推荐,还融入了个性化知乎日报等内容,是不错的素材,同时对电影…...

Python使用正则替换字符串
Python小技:使用正则替换字符串 java中有String.replaceAll()方法使用正则替换字符串, 在Python中,字符串也有一个replace方法,但是这个方法只能精准替换, 如果想正则替换,就要改成re.sub方法,而…...

谷歌浏览器插件
项目中有时候会用到插件 sync-cookie-extension1.0.0:开发环境同步测试 cookie 至 localhost,便于本地请求服务携带 cookie 参考地址:https://juejin.cn/post/7139354571712757767 里面有源码下载下来,加在到扩展即可使用FeHelp…...
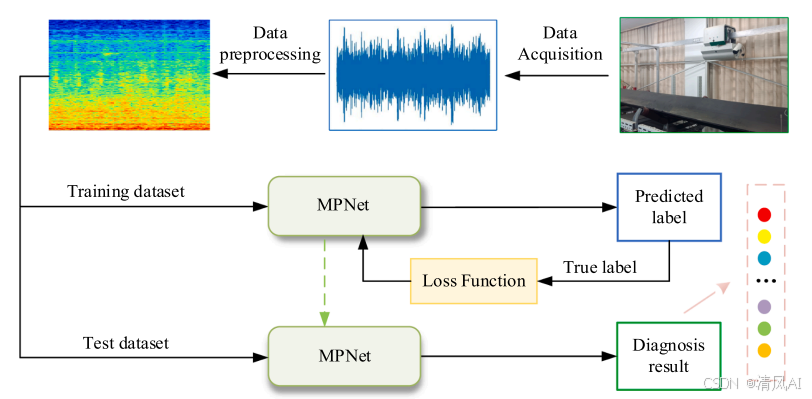
MPNet:旋转机械轻量化故障诊断模型详解python代码复现
目录 一、问题背景与挑战 二、MPNet核心架构 2.1 多分支特征融合模块(MBFM) 2.2 残差注意力金字塔模块(RAPM) 2.2.1 空间金字塔注意力(SPA) 2.2.2 金字塔残差块(PRBlock) 2.3 分类器设计 三、关键技术突破 3.1 多尺度特征融合 3.2 轻量化设计策略 3.3 抗噪声…...
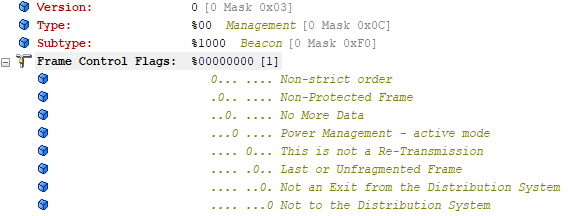
【WiFi帧结构】
文章目录 帧结构MAC头部管理帧 帧结构 Wi-Fi的帧分为三部分组成:MAC头部frame bodyFCS,其中MAC是固定格式的,frame body是可变长度。 MAC头部有frame control,duration,address1,address2,addre…...

【Linux】C语言执行shell指令
在C语言中执行Shell指令 在C语言中,有几种方法可以执行Shell指令: 1. 使用system()函数 这是最简单的方法,包含在stdlib.h头文件中: #include <stdlib.h>int main() {system("ls -l"); // 执行ls -l命令retu…...
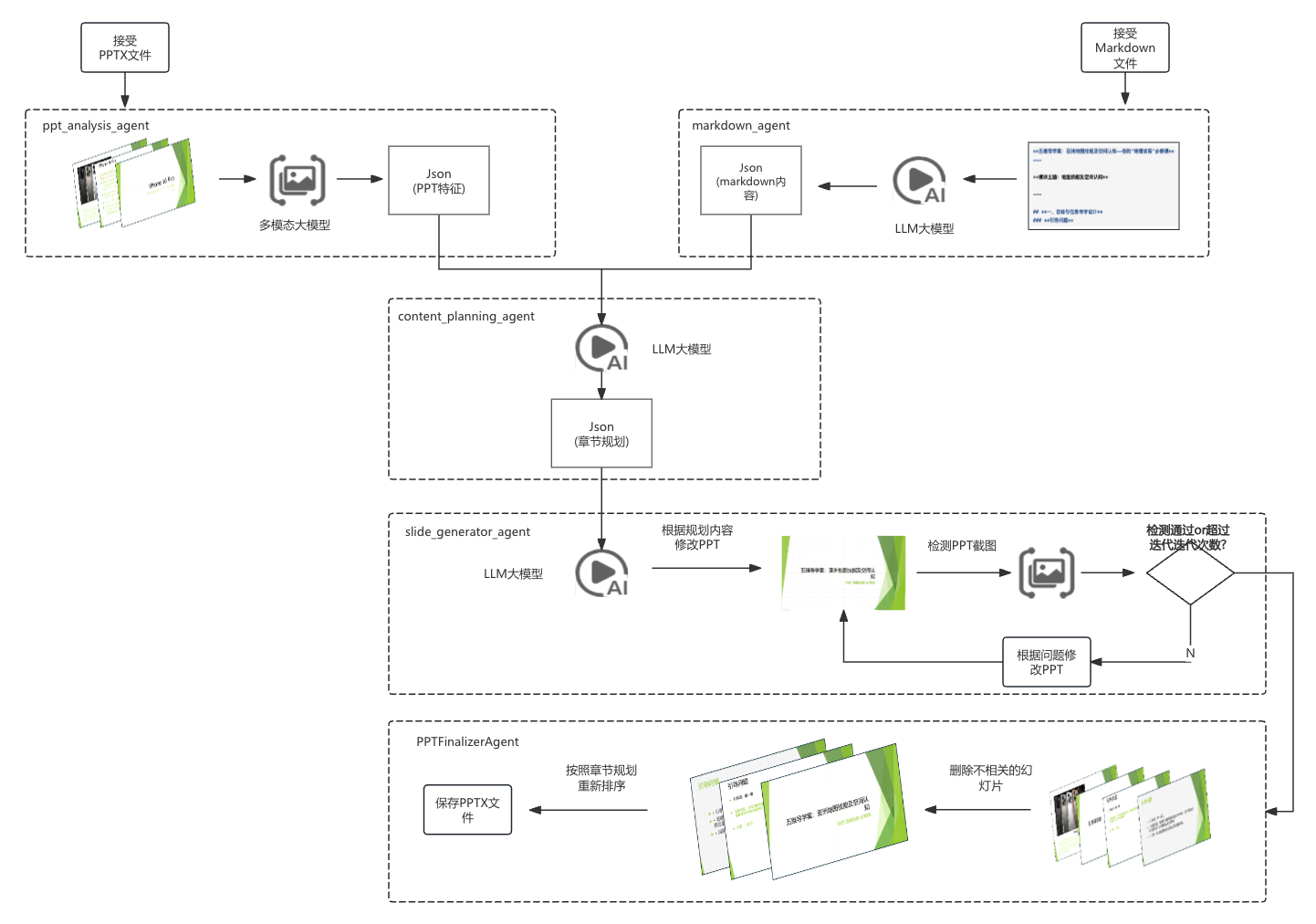
【项目实战】通过多模态+LangGraph实现PPT生成助手
PPT自动生成系统 基于LangGraph的PPT自动生成系统,可以将Markdown文档自动转换为PPT演示文稿。 功能特点 Markdown解析:自动解析Markdown文档结构PPT模板分析:分析PPT模板的布局和风格智能布局决策:匹配内容与合适的PPT布局自动…...

vue3 定时器-定义全局方法 vue+ts
1.创建ts文件 路径:src/utils/timer.ts 完整代码: import { onUnmounted } from vuetype TimerCallback (...args: any[]) > voidexport function useGlobalTimer() {const timers: Map<number, NodeJS.Timeout> new Map()// 创建定时器con…...

土地利用/土地覆盖遥感解译与基于CLUE模型未来变化情景预测;从基础到高级,涵盖ArcGIS数据处理、ENVI遥感解译与CLUE模型情景模拟等
🔍 土地利用/土地覆盖数据是生态、环境和气象等诸多领域模型的关键输入参数。通过遥感影像解译技术,可以精准获取历史或当前任何一个区域的土地利用/土地覆盖情况。这些数据不仅能够用于评估区域生态环境的变化趋势,还能有效评价重大生态工程…...

3403. 从盒子中找出字典序最大的字符串 I
3403. 从盒子中找出字典序最大的字符串 I 题目链接:3403. 从盒子中找出字典序最大的字符串 I 代码如下: class Solution { public:string answerString(string word, int numFriends) {if (numFriends 1) {return word;}string res;for (int i 0;i &…...

Spring Cloud Gateway 中自定义验证码接口返回 404 的排查与解决
Spring Cloud Gateway 中自定义验证码接口返回 404 的排查与解决 问题背景 在一个基于 Spring Cloud Gateway WebFlux 构建的微服务项目中,新增了一个本地验证码接口 /code,使用函数式路由(RouterFunction)和 Hutool 的 Circle…...
与常用工具深度洞察App瓶颈)
iOS性能调优实战:借助克魔(KeyMob)与常用工具深度洞察App瓶颈
在日常iOS开发过程中,性能问题往往是最令人头疼的一类Bug。尤其是在App上线前的压测阶段或是处理用户反馈的高发期,开发者往往需要面对卡顿、崩溃、能耗异常、日志混乱等一系列问题。这些问题表面上看似偶发,但背后往往隐藏着系统资源调度不当…...