利用OSMnx求路网最短路径并可视化(二)
书接上回,为了增加多路径的可视化效果和坐标匹配最近点来实现最短路可视化,我们使用图形化工具matplotlib结合OSMnx的绘图功能来展示整个路网图,并特别高亮显示计算出的最短路径。
多起终点最短路路径并计算距离和时间
完整代码#运行环境 Python 3.11
import operator
import igraph as ig # 引入igraph库,用于图的复杂网络分析与可视化
import networkx as nx # 引入networkx库,用于构建与操作复杂网络
import matplotlib.pyplot as plt # 引入matplotlib.pyplot,用于数据可视化
import osmnx as ox # 引入osmnx库,用于处理OpenStreetMap数据
from osmnx import routing # 从osmnx导入路由模块
from pyproj import CRS # 引入pyproj库中的CRS类,用于处理坐标参考系统# 设置matplotlib的字体,以便支持中文显示
plt.rcParams['font.sans-serif'] = ['SimHei'] # 使用黑体# 设置权重属性为道路长度,用于后续路径计算
weight = "length"# 定义绘制地图的地点,本例中为厦门思明区
place = "Siming Qu, Xiamen,Fujian,China"# 使用osmnx的graph_from_place函数,根据地点和驾驶网络类型创建图形G
G = ox.graph_from_place(place, network_type="drive")# 保存原始的OSM节点ID,并将G中的节点标签转换为整数,因为igraph需要整数索引
osmids = list(G.nodes)
G = nx.relabel.convert_node_labels_to_integers(G) # 节点重标记
osmid_values = {old_id: new_id for old_id, new_id in zip(G.nodes, osmids)} # 创建旧ID到新ID的映射
nx.set_node_attributes(G, osmid_values, "osmid") # 将OSM ID作为属性添加回每个节点# 在igraph中创建一个新图G_ig,复制G中的所有节点和边,并设定边的权重及节点的OSM ID属性
G_ig = ig.Graph(directed=True)
G_ig.add_vertices(G.nodes) # 添加节点
G_ig.add_edges(G.edges()) # 添加边
G_ig.vs["osmid"] = osmids # 设置节点的OSM ID属性
G_ig.es[weight] = list(nx.get_edge_attributes(G, weight).values()) # 设置边的权重属性# 使用osmnx绘制原始地图,但不显示,仅用于保存图像文件
fig, ax = ox.plot_graph(G, show=False, close=True, edge_color="#999999", edge_alpha=0.5, node_size=0, figsize=(10, 10))# 为图中的边补充缺失的速度信息,并据此计算通行时间
G = ox.add_edge_speeds(G)
G = ox.add_edge_travel_times(G)# 定义三个起始和结束节点对,用于计算最短路径
orig_dest_pairs = [(list(G)[10], list(G)[114]), (list(G)[0], list(G)[1123]), (list(G)[100], list(G)[2100])]
# 计算每一对节点间的最短路径,优化目标为通行时间
routes = [ox.shortest_path(G, orig, dest, weight="travel_time") for orig, dest in orig_dest_pairs]# 使用不同的颜色绘制这三条路径在地图上
route_colors = ["r", "y", "c"]
fig, ax = ox.plot_graph_routes(G, routes, route_colors=route_colors, route_linewidth=6, node_size=0, show=False, close=False)# 定义新函数calculate_path_stats,用于获取路径的GeoDataFrame,转换坐标系后计算总距离和通行时间
def calculate_path_stats(route, G):gdf_route = routing.route_to_gdf(G, route) # 将路径转化为GeoDataFrameproj_crs = CRS.from_epsg(3857) # 定义适合测量距离的Web Mercator坐标系gdf_route_proj = gdf_route.to_crs(proj_crs) # 将GeoDataFrame投影到新坐标系distance = gdf_route_proj.length.sum() # 计算路径总长度travel_time = gdf_route['travel_time'].sum() # 计算路径总通行时间return distance, travel_time# 应用新函数计算并打印每条路径的总距离和通行时间
stats = {f"Route {i+1}": calculate_path_stats(route, G) for i, route in enumerate(routes)}
for i, (route_name, (distance, travel_time)) in enumerate(stats.items(), start=1):print(f"{route_name}: 距离 = {distance:.2f} 米, 通行时间 = {travel_time:.2f} 秒")# 显示最终的地图,包含三条计算出的最短路径
plt.title('节点间最短路径')
plt.axis('off') # 隐藏坐标轴以聚焦于路径
plt.show()多起终点最短路路径可视化展示;

计算出最短路距离和通行时间;

任意二点坐标最短路
路网底图和出行类型需要改的话改这里,出行方式包括'walk'、bike'、'drive';
G_nx = ox.graph_from_place("Siming Qu, Xiamen,Fujian,China", network_type="drive")需要调整坐标的话改这个就好,坐标用的wgs84,可以用这个直接拾取新的坐标地图坐标系转换 - 在线工具 (tool.lu);
# 定义起点和终点的经纬度坐标
origin = (24.463087, 118.092150) # 起点坐标
destination = (24.477719, 118.138935) # 终点坐标完整代码#运行环境 Python 3.11
import osmnx as ox # 导入osmnx库,用于空间网络分析和可视化
import networkx as nx # 导入networkx库,用于图论计算# 使用osmnx.graph_from_place函数,根据地点名称和道路类型创建路网图
# 参数是地点名称(厦门市思明区)和网络类型(驾驶道路)
G2 = ox.graph_from_place("Siming Qu, Xiamen,Fujian,China", network_type="drive")# 定义起点和终点的经纬度坐标
origin = (24.463087, 118.092150) # 起点坐标
destination = (24.477719, 118.138935) # 终点坐标# 使用ox.distance.nearest_nodes函数,找到离起点和终点最近的路网图中的节点
# 注意:经纬度顺序在函数调用中是(y, x),即先经度后纬度,与中国常用的坐标表示相反
origin_node = ox.distance.nearest_nodes(G2, origin[1], origin[0]) # 起点最近节点
destination_node = ox.distance.nearest_nodes(G2, destination[1], destination[0]) # 终点最近节点# 计算路网图中从起点节点到终点节点的最短路径
route = ox.shortest_path(G2, origin_node, destination_node)# 使用osmnx.plot_graph_route函数绘制路网图,并突出显示计算出的最短路径
# 参数包括路网图G2、最短路径route、路径的颜色、节点的大小(设置为0以不显示节点)
fig, ax = ox.plot_graph_route(G2, route, route_color="c", node_size=0)二点坐标最短路结果如下图所示;

文章仅用于分享个人学习成果与个人存档之用,分享知识,如有侵权,请联系作者进行删除。所有信息均基于作者的个人理解和经验,不代表任何官方立场或权威解读。
相关文章:
利用OSMnx求路网最短路径并可视化(二)
书接上回,为了增加多路径的可视化效果和坐标匹配最近点来实现最短路可视化,我们使用图形化工具matplotlib结合OSMnx的绘图功能来展示整个路网图,并特别高亮显示计算出的最短路径。 多起终点最短路路径并计算距离和时间 完整代码#运行环境 P…...
及其Python和MATLAB实现)
双向门控循环神经网络(BiGRU)及其Python和MATLAB实现
BiGRU是一种常用的深度学习模型,用于处理序列数据的建模和预测。它是基于GRU(Gated Recurrent Unit)模型的改进版本,通过引入更多的隐藏层和增加网络的宽度,能够更好地捕捉复杂的序列数据中的模式。 背景:…...

【BUG】已解决:ERROR: Failed building wheel for jupyter-nbextensions-configurator
ERROR: Failed building wheel for jupyter-nbextensions-configurator 目录 ERROR: Failed building wheel for jupyter-nbextensions-configurator 【常见模块错误】 【解决方案】 欢迎来到英杰社区https://bbs.csdn.net/topics/617804998 欢迎来到我的主页,我…...

Unity UGUI 之 自动布局组件
本文仅作学习笔记与交流,不作任何商业用途 本文包括但不限于unity官方手册,唐老狮,麦扣教程知识,引用会标记,如有不足还请斧正 本文在发布时间选用unity 2022.3.8稳定版本,请注意分别 1.什么是自动布局组件…...

网络基础之(11)优秀学习资料
网络基础之(11)优秀学习资料 Author:Once Day Date: 2024年7月27日 漫漫长路,有人对你笑过嘛… 全系列文档可参考专栏:通信网络技术_Once-Day的博客-CSDN博客。 参考文档: 网络工程初学者的学习方法及成长之路(红…...

QT自定义无边框窗口(可移动控制和窗口大小调整)
QT是一个功能强大的跨平台开发框架,它提供了丰富的界面设计工具和组件。在界面开发中,QT窗口自带的标题栏无法满足我们的需求。我们就需要自定义无边框窗口,包括自定义标题栏和窗口大小调整功能。本文将介绍如何在QT中实现这些功能。 一、简…...

Typora 【最新1.8.6】版本安装下载教程 (轻量级 Markdown 编辑器),图文步骤详解,免费领取(软件可激活使用)
文章目录 软件介绍软件下载安装步骤激活步骤 软件介绍 Typora 是一款专为 Markdown 爱好者设计的文本编辑器,它结合了简洁的界面设计与强大的 Markdown 渲染能力,为用户提供了一个流畅、高效的写作环境。以下是对 Typora 更详细的介绍: 核心特…...

RxJava 面试题及其答案
以下是一个全面的 RxJava 面试题及其答案,涵盖了 RxJava 的各个方面,包括基本概念、操作符、线程管理、错误处理、背压处理等: 基本概念 1. RxJava 的基本概念和原理是什么? 答案: RxJava 是一个用于响应式编程的库…...

【Rust】所有权OwnerShip
什么是所有权 rust使用由编译器检查的一些规则构成的所有权系统来管理内存。且这不会影响程序的运行效率。 所有权规则 rust中每一个每一个值都有一个owner。在同一时刻,只能有一个owner。当这个owner超过范围,则该值会被丢弃。 String类型 为什么需…...

qt总结--翻金币案例
完成了一个小项目的在qt5.15.2环境下的运行,并使用NSIS editNSIS打包完成.有待改进之处:增加计时功能,随机且能通关功能,过关后选择下一关功能.打包后仅仅有安装包有图标 安装后应用图标并未改变 在qt .pro中有待改进对qt的基本操作和帮助文档有了基本的认识.对C制作小游戏有了…...

最清楚的 BIO、NIO、AIO 详解!
一、什么是 I/O? I/O 描述了计算机系统与外部设备(磁盘)之间通信的过程。 为了保证操作系统的稳定性和安全性,一个进程的地址空间划分为 用户空间(User space) 和 内核空间(Kernel space &…...

八股文学习第二天| HTTP请求报文和响应报文是怎样的,有哪些常见的字段?,HTTP有哪些请求方式?,GET请求和POST请求的区别?
1、HTTP请求报文和响应报文是怎样的,有哪些常见的字段? 答: HTTP报文分为请求报文和响应报文。 (1) 请求报文 请求报文主要由请求行、请求头、空行、请求体构成。 请求行包括如下字段: 方法(…...

C++初阶学习第四弹——类与对象(中)
目录 一. 类的默认成员函数 二.六种默认成员函数 1、构造函数 1.1 构造函数的作用 1.2 特性 1.3 默认构造函数 2、析构函数 2.1 析构函数的作用 2.2 析构函数的用法 3、拷贝构造函数 3.1 拷贝构造函数的作用 3.2 特征 3.3 默认拷贝构造函数 三.总结 类与对象&…...

【计算机网络】期末实验答辩
注意事项: 1)每位同学要在下面做过的实验列表中选取三个实验进行答辩准备,并将自己的姓名,学号以及三个实验序号填入共享文档"1(2)班答辩名单"中。 2)在答辩当日每位同学由老师在表…...

一步步教你学会如何安装VMare虚拟机(流程参考图)
前言:一步步教你安装VMare虚拟机(此版本为17.5。2版本)。 1、安装 2、确认协议 3、选择位置存放 4、选择第二个 5、都不选。 6、都选提供便捷操作 7、点击许可证,将密钥输入(可以在网络寻找自己版本的密钥ÿ…...

WebGoC题解(14) 151.(2017dloi小乙)第5题 巧克力甜度(sweet)
题目描述 妈妈买了n颗甜度不同的巧克力,规定小C只能吃最大甜度之和是S。 例如:有5颗巧克力,s6,每个的甜度分别为: 4 2 3 1 1,那么小C最多可以吃3颗。 请问你能帮小C计算一下最多能吃多少颗巧克力吗? 输入格…...

深入探索PHP框架:Symfony框架全面解析
1. 引言 在现代Web开发领域,PHP作为一种广泛使用的服务器端脚本语言,其框架的选择对于项目的成功至关重要。PHP框架不仅能够提高开发效率,还能确保代码的质量和可维护性。本文将深入探讨Symfony框架,这是一个功能强大且灵活的PHP…...

内卷的利与弊
“内卷”原指一类文化模式达到了某种最终的形态以后,既没有办法稳定下来,也没有办法转变为新的形态,而只能不断地在内部变得更加复杂的现象。经网络流传,很多大学生用其来指代非理性的内部竞争或“被自愿”竞争。现指同行间竞相付…...

用Java手写jvm之实现查找class
写在前面 完成类加载器加载class的三阶段,加载,解析,初始化中的加载😀😀😀 源码 。 jvm想要运行class,是根据类全限定名称来从特定的位置基于类加载器来查找的,分别如下:…...

【React】组件:全面解析现代前端开发的基石
文章目录 一、什么是组件?二、组件的类型三、组件的生命周期四、状态管理五、属性传递六、组合与继承七、最佳实践 在现代前端开发中,React 已成为开发者构建用户界面的首选框架之一。React 的强大之处在于其组件化设计,允许开发者将 UI 拆分…...
Opencv中的addweighted函数
一.addweighted函数作用 addweighted()是OpenCV库中用于图像处理的函数,主要功能是将两个输入图像(尺寸和类型相同)按照指定的权重进行加权叠加(图像融合),并添加一个标量值&#x…...
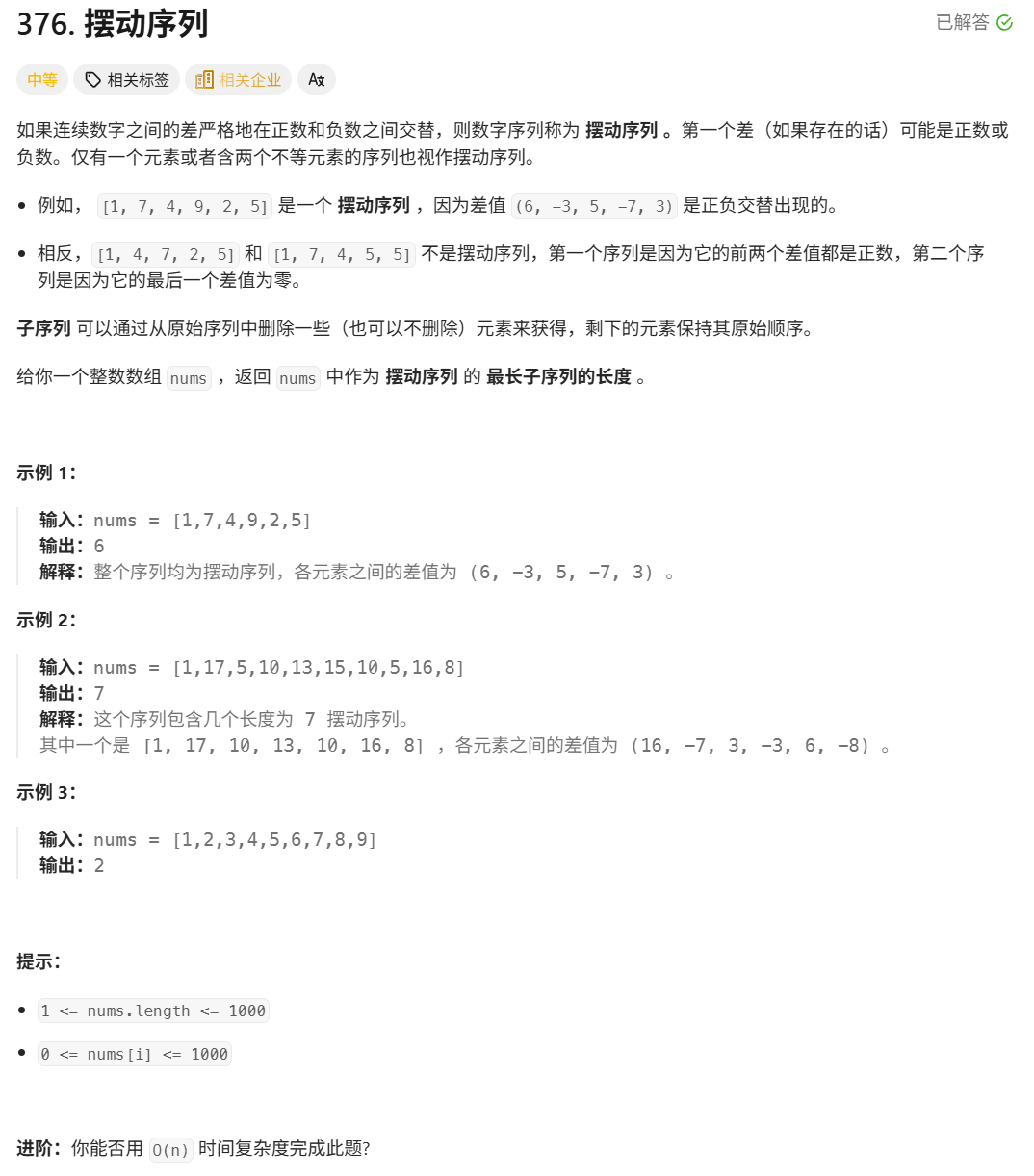
376. Wiggle Subsequence
376. Wiggle Subsequence 代码 class Solution { public:int wiggleMaxLength(vector<int>& nums) {int n nums.size();int res 1;int prediff 0;int curdiff 0;for(int i 0;i < n-1;i){curdiff nums[i1] - nums[i];if( (prediff > 0 && curdif…...

IoT/HCIP实验-3/LiteOS操作系统内核实验(任务、内存、信号量、CMSIS..)
文章目录 概述HelloWorld 工程C/C配置编译器主配置Makefile脚本烧录器主配置运行结果程序调用栈 任务管理实验实验结果osal 系统适配层osal_task_create 其他实验实验源码内存管理实验互斥锁实验信号量实验 CMISIS接口实验还是得JlINKCMSIS 简介LiteOS->CMSIS任务间消息交互…...

【C++从零实现Json-Rpc框架】第六弹 —— 服务端模块划分
一、项目背景回顾 前五弹完成了Json-Rpc协议解析、请求处理、客户端调用等基础模块搭建。 本弹重点聚焦于服务端的模块划分与架构设计,提升代码结构的可维护性与扩展性。 二、服务端模块设计目标 高内聚低耦合:各模块职责清晰,便于独立开发…...

Java面试专项一-准备篇
一、企业简历筛选规则 一般企业的简历筛选流程:首先由HR先筛选一部分简历后,在将简历给到对应的项目负责人后再进行下一步的操作。 HR如何筛选简历 例如:Boss直聘(招聘方平台) 直接按照条件进行筛选 例如:…...
LLMs 系列实操科普(1)
写在前面: 本期内容我们继续 Andrej Karpathy 的《How I use LLMs》讲座内容,原视频时长 ~130 分钟,以实操演示主流的一些 LLMs 的使用,由于涉及到实操,实际上并不适合以文字整理,但还是决定尽量整理一份笔…...
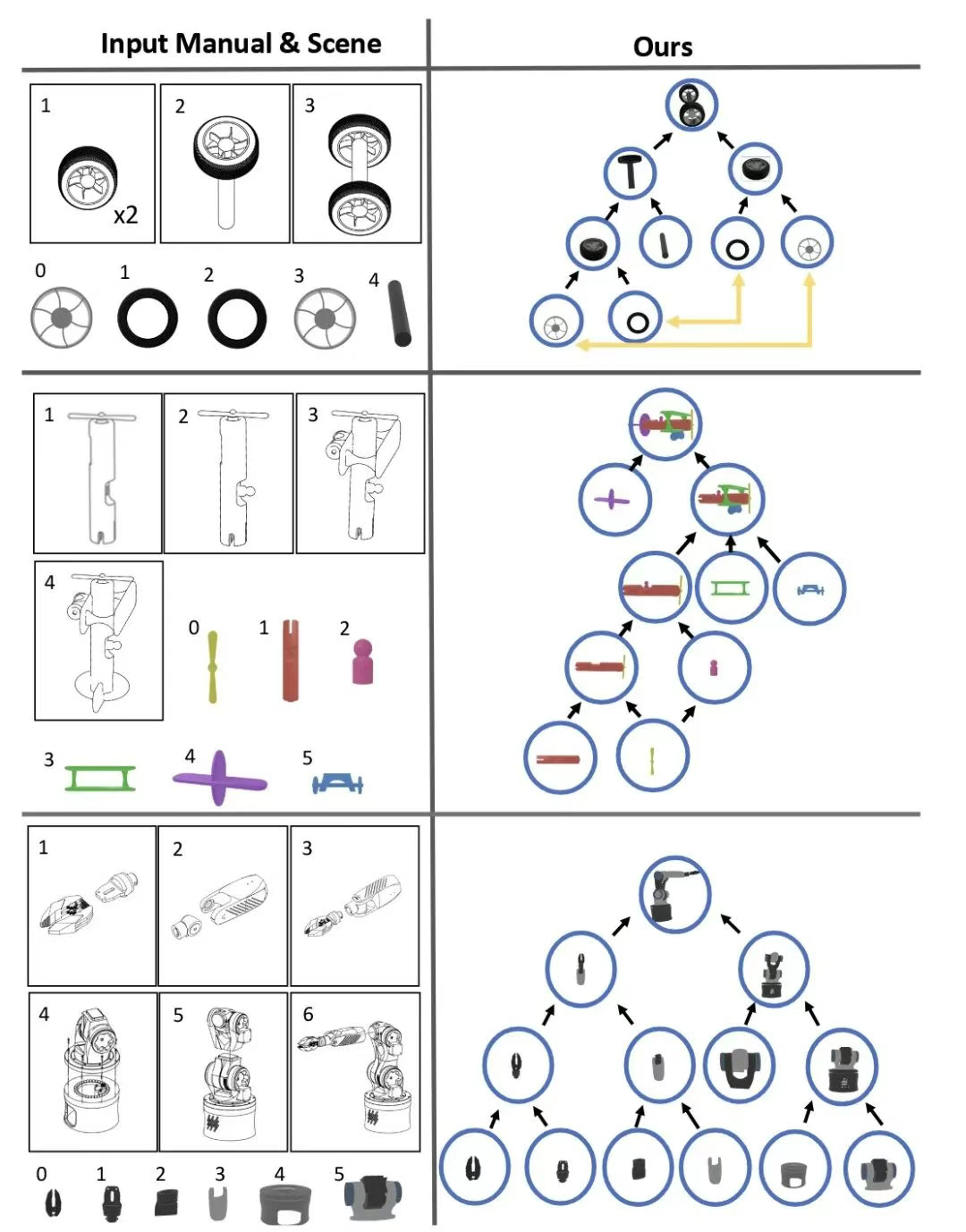
RSS 2025|从说明书学习复杂机器人操作任务:NUS邵林团队提出全新机器人装配技能学习框架Manual2Skill
视觉语言模型(Vision-Language Models, VLMs),为真实环境中的机器人操作任务提供了极具潜力的解决方案。 尽管 VLMs 取得了显著进展,机器人仍难以胜任复杂的长时程任务(如家具装配),主要受限于人…...
三分算法与DeepSeek辅助证明是单峰函数
前置 单峰函数有唯一的最大值,最大值左侧的数值严格单调递增,最大值右侧的数值严格单调递减。 单谷函数有唯一的最小值,最小值左侧的数值严格单调递减,最小值右侧的数值严格单调递增。 三分的本质 三分和二分一样都是通过不断缩…...
STM32---外部32.768K晶振(LSE)无法起振问题
晶振是否起振主要就检查两个1、晶振与MCU是否兼容;2、晶振的负载电容是否匹配 目录 一、判断晶振与MCU是否兼容 二、判断负载电容是否匹配 1. 晶振负载电容(CL)与匹配电容(CL1、CL2)的关系 2. 如何选择 CL1 和 CL…...
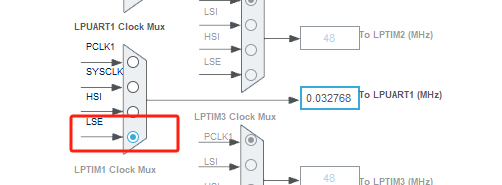
stm32wle5 lpuart DMA数据不接收
配置波特率9600时,需要使用外部低速晶振...