滑模变结构控制仿真实例(s-function代码详解)
目录
- 一、建立系统数学模型
- 二、控制器设计
- 1. 设计滑模面(切换面)
- 2.设计控制器 u
- 3. 稳定性证明
- 三、 Matlab 仿真
- 1. s-function 模型
- 2. 主要代码
- 3. 仿真结果(采用符号函数sign(s))
- 4. 仿真结果(采用饱和函数sat(s))
一、建立系统数学模型
{ x ˙ 1 = x 2 x ˙ 2 = x 3 x ˙ 3 = x 1 + x 2 x 3 + u \begin{aligned} \left\{ \begin{array}{l} \dot{x}_1 = x_2 \\ \dot{x}_2 = x_3 \\ \dot{x}_3 = x_1 + x_2 x_3 + u \end{array} \right. \end{aligned} ⎩ ⎨ ⎧x˙1=x2x˙2=x3x˙3=x1+x2x3+u
该数学模型参考:通俗理解滑模变结构控制
二、控制器设计
设计滑模控制器需要满足以下条件:
- 稳定性条件:在s=0的滑模面上,状态是收敛的,即滑动模态存在;
- 可达性条件:在切换面s=0以外的运动点将于有限时间内到达切换面;
- 保证滑模运动的稳定性;
- 达到控制系统运动品质要求。
1. 设计滑模面(切换面)
s = x 1 + 2 x 2 + x 3 \begin{align*} s = x_1 + 2x_2+x_3 \end{align*} s=x1+2x2+x3
2.设计控制器 u
对滑模面函数求导得
s ˙ = x ˙ 1 + 2 x ˙ 2 + x ˙ 3 \dot{s} = \dot{x}_1+2\dot{x}_2+\dot{x}_3 s˙=x˙1+2x˙2+x˙3
将数学模型中状态变量表达式代入可得
s ˙ = x ˙ 1 + 2 x ˙ 2 + x ˙ 3 = x 2 + 2 x 3 + x 1 + x 2 x 3 + u = x 1 + x 2 + 2 x 3 + x 2 x 3 + u \begin{align*} \dot{s} &= \dot{x}_1+2\dot{x}_2+\dot{x}_3 \\ &=x_2+2x_3+x_1+x_2 x_3+u \\ &= x_1+x_2+2x_3+x_2 x_3 + u \end{align*} s˙=x˙1+2x˙2+x˙3=x2+2x3+x1+x2x3+u=x1+x2+2x3+x2x3+u
取 s ˙ \dot{s} s˙ = 趋近律, 采用指数趋近律 s ˙ = − s g n ( s ) − s \dot{s} = -sgn(s)-s s˙=−sgn(s)−s ( s g n ( s ) sgn(s) sgn(s)为符号函数)求得控制器 u u u
u = − s g n ( s ) − s − x 1 − x 2 − 2 x 3 − x 2 x 3 \begin{align*} u = -sgn(s) - s -x_1 -x_2 -2x_3-x_2 x_3 \end{align*} u=−sgn(s)−s−x1−x2−2x3−x2x3
3. 稳定性证明
设计 L y a p u n v o Lyapunvo Lyapunvo函数 V = 1 2 s 2 V = \frac{1}{2}s^2 V=21s2 , 求得其导数 V ˙ = s s ˙ = − ∣ s ∣ − s 2 \dot{V} = s\dot{s} = -|s|-s^2 V˙=ss˙=−∣s∣−s2
由此可知,该 L y a p u n v o Lyapunvo Lyapunvo 函数的导数负定,系统渐进稳定, t → ∞ t \rightarrow \infty t→∞ 时, s → 0 s \rightarrow 0 s→0。因此 x 1 , x 2 , x 3 x_1, x_2, x_3 x1,x2,x3都趋于 0 0 0。
三、 Matlab 仿真
1. s-function 模型

2. 主要代码
仿真中,为避免与模板中的 u u u 冲突,将输入 u 用 control_u 替代。
pa = struct('c1',1, ...'c2',2);
case 1,sys=mdlDerivatives(t,x,u,pa);
case 3,sys=mdlOutputs(t,x,u,pa);
sizes.NumContStates = 3; %3个连续状态变量
sizes.NumDiscStates = 0; %input只有输出,没有输入,即没有自身状态
sizes.NumOutputs = 4; %输出为:dx1,dx2,dx3,control_u
sizes.NumInputs = 0; %输入个数为0
sizes.DirFeedthrough = 0; %输入不会直接影响输出。输出是仅仅由状态变量决定的
sizes.NumSampleTimes = 1; % at least one sample time is needed
%状态方程的更新通过输入u 来计算新的状态值,然后输出这些状态值。
%这意味着输入u 不直接影响输出,而是通过状态更新来间接影响输出。
%所以 DirFeedthrough 应该设置为 0。
% 初始化状态变量
x0 = [3;0;0];
function sys=mdlDerivatives(t,x,u,pa)
c1 = pa.c1;
c2 = pa.c2;
x1 = x(1);
x2 = x(2);
x3 = x(3);
%滑模面
s = x3+c2*x2+c1*x1;
%控制输入
control_u = -sign(s)-s-x1-x2-2*x3-x2*x3;
%系统状态方程
dx1 = x2;
dx2 = x3;
dx3 = x1+x2*x3+control_u;
sys = [dx1;dx2;dx3];
%输出函数
function sys=mdlOutputs(t,x,u,pa)
c1 = pa.c1;
c2 = pa.c2;
x1 = x(1);
x2 = x(2);
x3 = x(3);
%滑模面
s = x3+c2*x2+c1*x1;
%控制输入
control_u = -sign(s)-s-x1-x2-2*x3-x2*x3; %使用符号函数sign(s)
%control_u = -sat(s)-s-x1-x2-2*x3-x2*x3; %使用饱和函数消除抖振(改进)
% 输出状态变量 x1, x2, x3 以及 control_u
sys = [x;control_u]; %或者sys = [x(1);x(2);x(3);control_u];
3. 仿真结果(采用符号函数sign(s))

使用符号函数的控制器u,会产生明显抖振,为了消除抖振,可以采用饱和函数来替代符号函数
即指数趋近律 s ˙ = − s g n ( s ) − s \dot{s} = -sgn(s)-s s˙=−sgn(s)−s 换为 s ˙ = − s a t ( s ) − s \dot{s} = -sat(s)-s s˙=−sat(s)−s
其中
s a t ( s ) = { 1 s > Δ k s ∣ s ∣ ≤ Δ , k = 1 / Δ − 1 s < − Δ sat(s)= \left\{ \begin{array}{ll} 1 & s > \Delta \\ ks & |s| \leq \Delta, k = 1/\Delta\\ -1 & s < -\Delta \end{array} \right. sat(s)=⎩ ⎨ ⎧1ks−1s>Δ∣s∣≤Δ,k=1/Δs<−Δ
取阈值 Δ = 1 \Delta = 1 Δ=1 , 改进后的控制器u为
u = − s a t ( s ) − s − x 1 − x 2 − 2 x 3 − x 2 x 3 \begin{align*} u = -sat(s) - s -x_1 -x_2 -2x_3 -x_2 x_3 \end{align*} u=−sat(s)−s−x1−x2−2x3−x2x3
更改代码实现饱和函数控制器,只需把之前函数输出部分代码中 s i g n ( s ) sign(s) sign(s)改为 s a t ( s ) sat(s) sat(s),其余不变
function sys=mdlOutputs(t,x,u,pa)
c1 = pa.c1;
c2 = pa.c2;
x1 = x(1);
x2 = x(2);
x3 = x(3);
%滑模面
s = x3+c2*x2+c1*x1;
%控制输入
%control_u = -sign(s)-s-x1-x2-2*x3-x2*x3; %使用符号函数sign(s)
control_u = -sat(s)-s-x1-x2-2*x3-x2*x3; %使用饱和函数消除抖振% 输出状态变量 x1, x2, x3 以及 control_u
sys = [x;control_u]; %或者sys = [x(1);x(2);x(3);control_u];
并在s-function函数最下方(即 m d l T e r m i n a t e ( t , x , u ) mdlTerminate(t,x,u) mdlTerminate(t,x,u)函数后面)添加 s a t ( s ) sat(s) sat(s)饱和函数的实现:
%function sys=mdlTerminate(t,x,u)
%sys = [];
% end mdlTerminate% y = sat(s) 将输入 s 限制在 [-1, 1] 范围内,其中 k = 1 / D
function y = sat(s)
D = 1; %设置阈值 D
k = 1 / D; %设置比例常数 k
if s > Dy = 1;
elseif s < -Dy = -1;
elsey = k * s;
end
4. 仿真结果(采用饱和函数sat(s))

可以看出,抖振被有效消除。
相关文章:
滑模变结构控制仿真实例(s-function代码详解)
目录 一、建立系统数学模型二、控制器设计1. 设计滑模面(切换面)2.设计控制器 u3. 稳定性证明 三、 Matlab 仿真1. s-function 模型2. 主要代码3. 仿真结果(采用符号函数sign(s))4. 仿真结果(采用饱和函数sat(s)) 一、建立系统数学模型 { x ˙ 1 x 2 x ˙ 2 x 3 x ˙ 3 x 1 …...

MySQL处理引擎
MySQL中的数据用各种不同的技术存储在文件(或者内存)中。这些技术中的每一种都 使用不同的存储机制、索引技巧、锁定水平并且最终提供广泛的、不同的功能和能力。通过 选择不同的技术,能够获得额外的速度或者功能,从而改善应用的整体性能。 这些不同的技…...

HTTP 方法详解:GET、POST 和 PUT
HTTP 方法详解:GET、POST 和 PUT HTTP 方法(GET、POST、PUT)用于客户端和服务器之间的通信。它们在输入、输出和传输内容上有显著区别。 1. GET 方法 – 获取资源 用途:从服务器获取资源。 输入: 请求行ÿ…...
被工信部认可的开源软件治理解决方案
近日,工信部网络安全产业发展中心正式发布了“2023年信息技术应用创新解决方案”,开源网安凭借“基于SCA技术开源软件治理解决方案”顺利入选,成为经工信部认可的优秀解决方案,这是开源网安连续两届荣获此荣誉。 工业和信息化部网…...

文件包含漏洞--pyload
文章目录 前言一、pandas是什么?二、使用步骤 1.引入库2.读入数据总结 一.PHP伪协议利用 php://协议 php://filter :用于在读取作用和写入文件时进行过滤和转换操作。 作用1:利用base64编码过滤器读取源码 通常利用文件包含执行php://filte…...

C++包管理之`vcpkg`简介
文章目录 工程文件安装vcpkg安装fmt库安装全局的库安装仅该工程使用的库 在CMake中使用vcpkg通过CMAKE_TOOLCHAIN_FILE使用vcpkg通过CMakePresets.json使用vcpkg 在C开发中,我们经常会使用一些第三方库,比如说Boost、fmt、spdlog等等。这些库的安装和使用…...

【机器学习】必会核函数之:高斯核函数
高斯核函数 1、引言2、高斯核函数2.1 定义2.2 核心原理2.3 应用场景2.4 代码示例3、总结1、引言 在机器学习和数据科学领域,核方法 ( K e r n e l M e t h o d s ) (Kernel Methods) (Kerne...

51单片机和STM32区别
51单片机和 STM32 区别 51单片机和 STM32 是两种常见的微控制器,它们在架构、性能、外设接口、功耗和开发环境等方面有所不同。 1. 架构差异 51单片机基于传统的哈佛总线结构,采用 CISC 架构,而 STM32 基于 ARM Cortex-M 系列的32位处理器核…...

Python 伪随机数生成器
random.sample() 函数原理 在 Python 中,随机数的生成通常依赖于伪随机数生成器(PRNG)。random 模块提供了一个易于使用的接口来生成伪随机数。以下是 random 模块中随机数生成的基本原理和方法: 伪随机数生成器(PRN…...
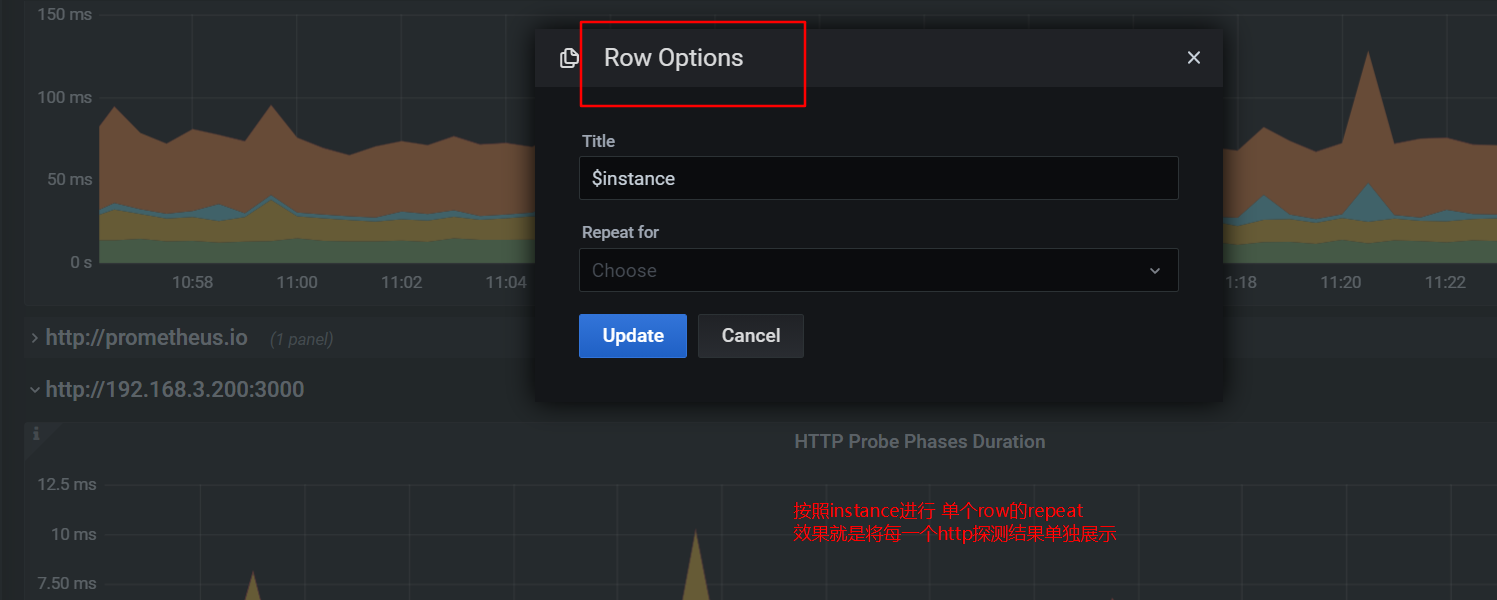
7.5 grafana上导入模板看图并讲解告警
本节重点介绍 : blackbox_exporter grafana大盘导入和查看告警配置讲解 grafana大盘 grafana 上导入 blackbox_exporter dashboard 地址 https://grafana.com/grafana/dashboards/13659举例图片http总览图value_mapping设置 展示设置阈值,展示不同背景色 告警配…...

BUG解决(vue3+echart报错):Cannot read properties of undefined (reading ‘type‘)
这是 vue3echart5 遇到的报错:Cannot read properties of undefined (reading ‘type‘) 这个问题需要搞清楚两个关键方法: toRaw: 作用:将一个由reactive生成的响应式对象转为普通对象。 使用场景: 用于读取响应式…...

VSCode+git的gitee仓库搭建
在此之前你已经在gitee创建好了账号,并新建了一个仓库。 1. 安装 Visual Studio Code Visual Studio Code 是编辑 Markdown 和站点配置文件的基础,以下将其简称为 VSCode,你可以在它的 官方网站 下载到它。 如若不理解各个版本之间的区别…...

Golang | Leetcode Golang题解之第297题二叉树的序列化与反序列化
题目: 题解: type Codec struct{}func Constructor() (_ Codec) {return }func (c Codec) serialize(root *TreeNode) string {if root nil {return "X"}left : "(" c.serialize(root.Left) ")"right : "("…...

交叉熵和MSE的区别
交叉熵 交叉熵损失通常用于分类问题,尤其是二分类和多分类问题。它度量的是预测概率分布与真实标签概率分布之间的差异。 适用于分类问题。常用于神经网络中的Softmax层之后作为损失函数。适用于二分类、多分类中的模型优化(如图像分类、文本分类等&am…...
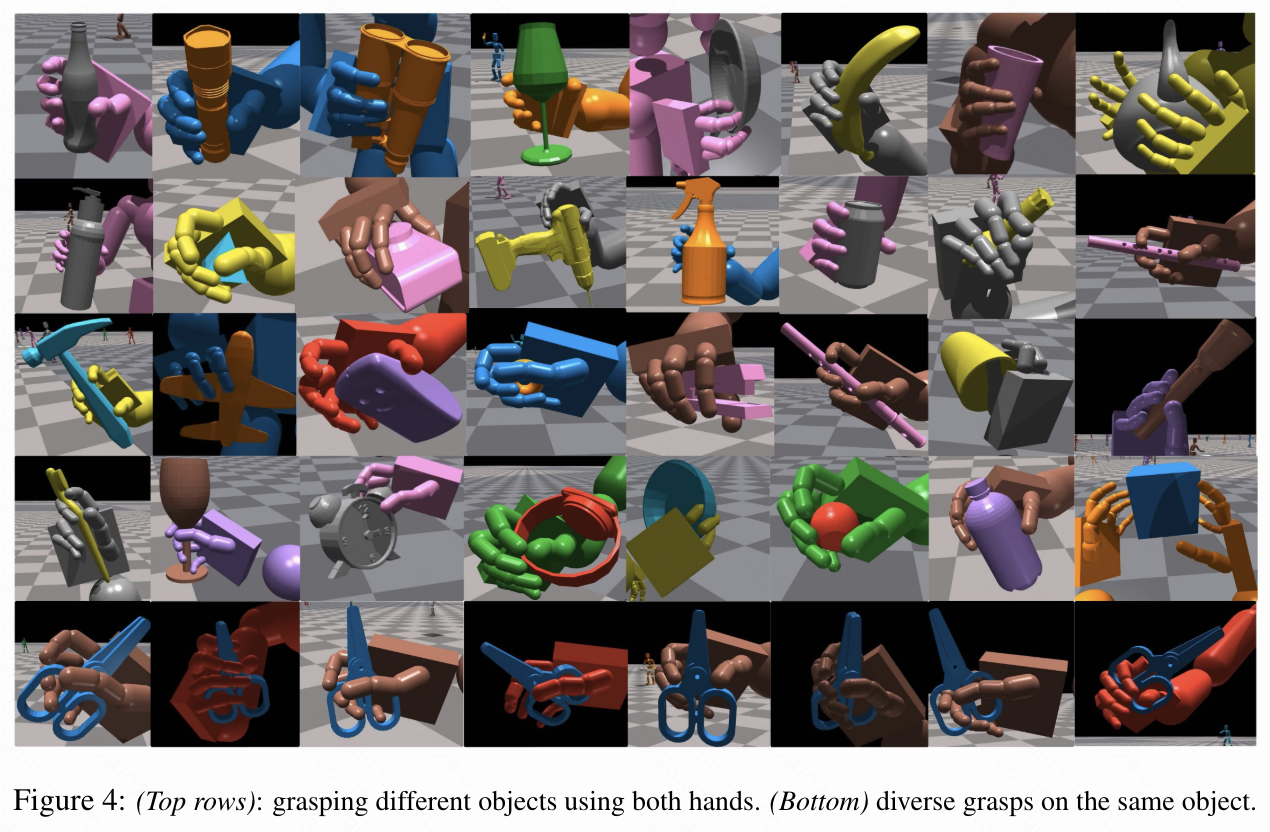
具身智能又进一步!卡内基梅隆Meta苏黎世联邦实现虚拟人超灵活抓取
论文链接:https://arxiv.org/pdf/2407.11385 github链接:https://www.zhengyiluo.com/Omnigrasp-Site/ 亮点直击 本文设计了一种灵巧且通用的人形机器人运动表示,这显著提高了样本效率,并使得通过简单而有效的状态和奖励设计来学习…...

嘉盛:货币政策走向与市场预期
在当前经济背景下,美联储的政策决策备受关注。尽管本周的会议可能不会带来实质性利率变动,但其后的走向可能对未来产生深远影响。市场预期与政策走向 随着近几个月大量通胀数据公布,市场普遍预计,美联储将为即将到来的降息措施奠定…...

[C#]基于wpf实现的一百多种音色的Midi键盘软件
键盘 音色库 源码地址:https://download.csdn.net/download/FL1623863129/89599322...

关于香橙派系统烧录,1.1.8或者1.1.10两个版本都无法启动Orangepi5
先执行 git clone https://github.com/orangepi-xunlong/orangepi-build.gitgit log 默认会显示较新的提交记录。如果你需要查看更多的提交记录,可以使用以下方法: git log --oneline --graph --all这会以简洁的方式显示所有分支的提交记录,…...

深入解析Python `httpx`源码,探索现代HTTP客户端的秘密!
🔸 第一部分:httpx请求入口 我们从最常用的入口开始,看看如何使用httpx库发送HTTP请求。通常,我们会使用 httpx.get() 或 httpx.post() 方法: import httpxresponse httpx.get(https://example.com) print(response…...

python爬虫【3】—— 爬虫反反爬
一、常见的反爬手段和解决方法 二、splash 介绍与安装 三、验证码识别 图片验证码的处理方案 手动输入(input) 这种方法仅限于登录一次就可持续使用的情况图像识别引擎解析 使用光学识别引擎处理图片中的数据,目前常用于图片数据提取,较少用于验证码…...
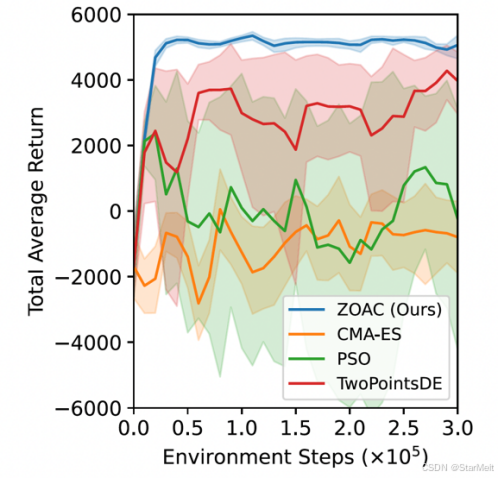
突破不可导策略的训练难题:零阶优化与强化学习的深度嵌合
强化学习(Reinforcement Learning, RL)是工业领域智能控制的重要方法。它的基本原理是将最优控制问题建模为马尔可夫决策过程,然后使用强化学习的Actor-Critic机制(中文译作“知行互动”机制),逐步迭代求解…...
CMake基础:构建流程详解
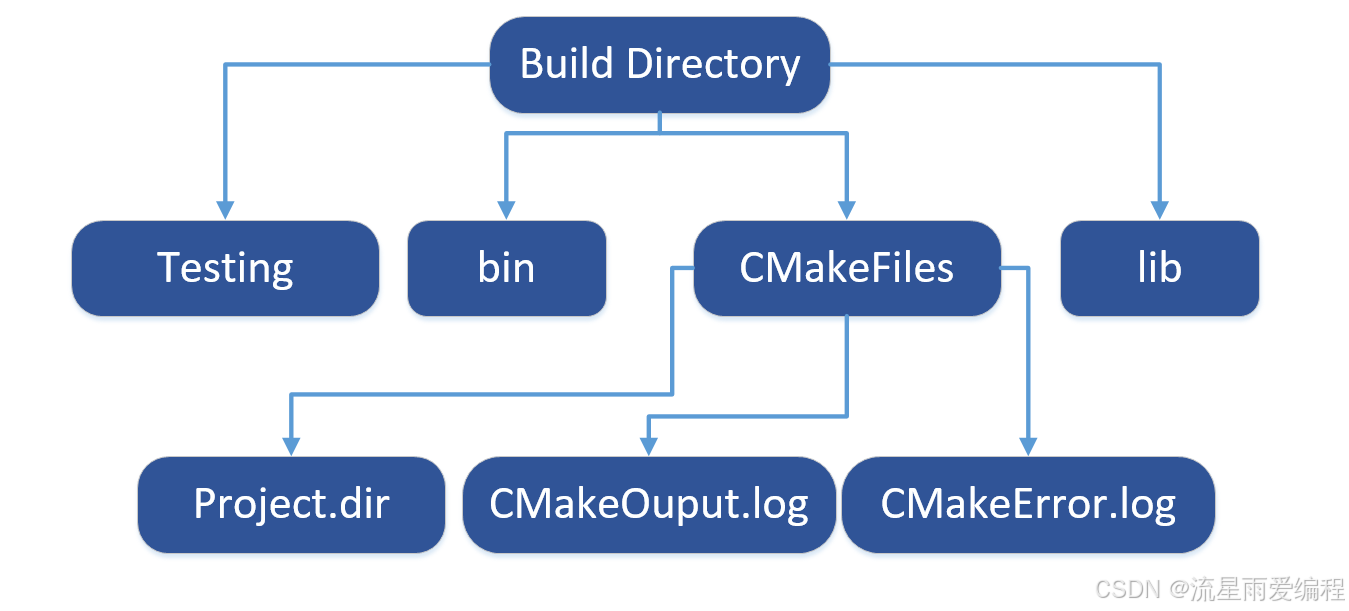
目录 1.CMake构建过程的基本流程 2.CMake构建的具体步骤 2.1.创建构建目录 2.2.使用 CMake 生成构建文件 2.3.编译和构建 2.4.清理构建文件 2.5.重新配置和构建 3.跨平台构建示例 4.工具链与交叉编译 5.CMake构建后的项目结构解析 5.1.CMake构建后的目录结构 5.2.构…...

【C++从零实现Json-Rpc框架】第六弹 —— 服务端模块划分
一、项目背景回顾 前五弹完成了Json-Rpc协议解析、请求处理、客户端调用等基础模块搭建。 本弹重点聚焦于服务端的模块划分与架构设计,提升代码结构的可维护性与扩展性。 二、服务端模块设计目标 高内聚低耦合:各模块职责清晰,便于独立开发…...

第 86 场周赛:矩阵中的幻方、钥匙和房间、将数组拆分成斐波那契序列、猜猜这个单词
Q1、[中等] 矩阵中的幻方 1、题目描述 3 x 3 的幻方是一个填充有 从 1 到 9 的不同数字的 3 x 3 矩阵,其中每行,每列以及两条对角线上的各数之和都相等。 给定一个由整数组成的row x col 的 grid,其中有多少个 3 3 的 “幻方” 子矩阵&am…...

MySQL 主从同步异常处理
阅读原文:https://www.xiaozaoshu.top/articles/mysql-m-s-update-pk MySQL 做双主,遇到的这个错误: Could not execute Update_rows event on table ... Error_code: 1032是 MySQL 主从复制时的经典错误之一,通常表示ÿ…...

全面解析数据库:从基础概念到前沿应用
在数字化时代,数据已成为企业和社会发展的核心资产,而数据库作为存储、管理和处理数据的关键工具,在各个领域发挥着举足轻重的作用。从电商平台的商品信息管理,到社交网络的用户数据存储,再到金融行业的交易记录处理&a…...
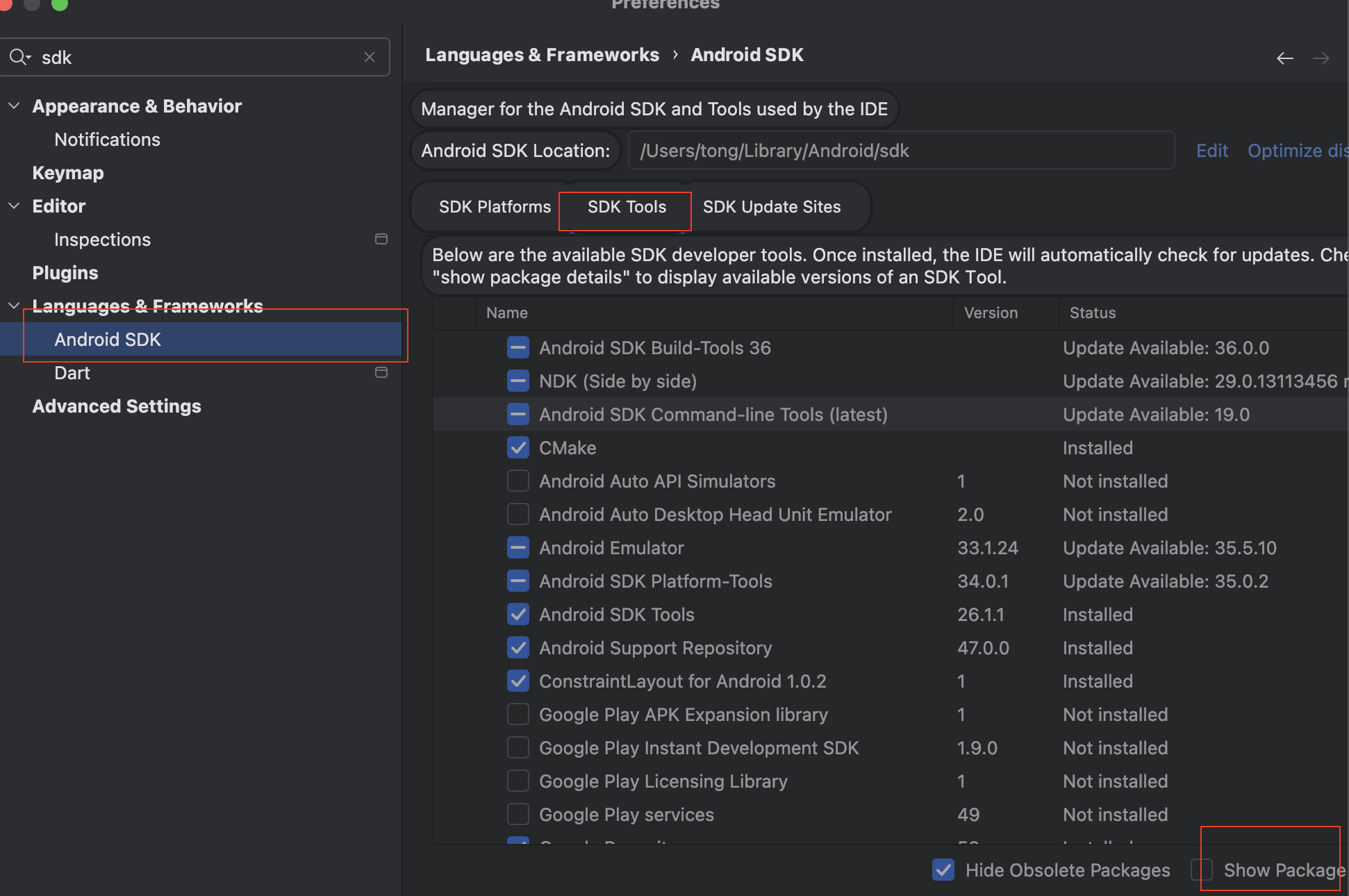
Mac flutter环境搭建
一、下载flutter sdk 制作 Android 应用 | Flutter 中文文档 - Flutter 中文开发者网站 - Flutter 1、查看mac电脑处理器选择sdk 2、解压 unzip ~/Downloads/flutter_macos_arm64_3.32.2-stable.zip \ -d ~/development/ 3、添加环境变量 命令行打开配置环境变量文件 ope…...

数据分析六部曲?
引言 上一章我们说到了数据分析六部曲,何谓六部曲呢? 其实啊,数据分析没那么难,只要掌握了下面这六个步骤,也就是数据分析六部曲,就算你是个啥都不懂的小白,也能慢慢上手做数据分析啦。 第一…...

LUA+Reids实现库存秒杀预扣减 记录流水 以及自己的思考
目录 lua脚本 记录流水 记录流水的作用 流水什么时候删除 我们在做库存扣减的时候,显示基于Lua脚本和Redis实现的预扣减 这样可以在秒杀扣减的时候保证操作的原子性和高效性 lua脚本 // ... 已有代码 ...Overridepublic InventoryResponse decrease(Inventor…...

shell脚本质数判断
shell脚本质数判断 shell输入一个正整数,判断是否为质数(素数)shell求1-100内的质数shell求给定数组输出其中的质数 shell输入一个正整数,判断是否为质数(素数) 思路: 1:1 2:1 2 3:1 2 3 4:1 2 3 4 5:1 2 3 4 5-------> 3:2 4:2 3 5:2 3…...