目标检测——YOLOv10: Real-Time End-to-End Object Detection
YOLOv10是在YOLOv8的基础上,借鉴了RT-DETR的一些创新点改进出来的
标题:YOLOv10: Real-Time End-to-End Object Detection
论文:https://arxiv.org/pdf/2405.14458
源码:https://github.com/THU-MIG/yolov10

1. 论文介绍
在过去的几年中,YOLO(You Only Look Once)算法因其在计算成本和检测性能之间有效的平衡而成为实时目标检测领域的主导范式。研究人员已经探索了YOLO的架构设计、优化目标、数据增强策略等,取得了显著的进展。然而,对非极大值抑制(Non-Maximum Suppression, NMS)的依赖限制了YOLO的端到端部署,并负面影响了推理延迟。此外,YOLO中各个组件的设计缺乏全面和深入的检查,导致明显的计算冗余,并限制了模型的能力。这导致了次优的效率,并且有很大的性能提升空间。在这项工作中,我们旨在从后处理和模型架构两个方面进一步推进YOLO的性能-效率边界。为此,我们首先提出了一致的双重分配,用于无需NMS的YOLO训练,这同时带来了竞争性的性能和低推理延迟。此外,我们引入了针对YOLO的整体效率-准确性驱动模型设计策略。我们从效率和准确性两个角度全面优化了YOLO的各个组件,大大减少了计算开销并增强了能力。我们的努力成果是新一代的YOLO系列,用于实时端到端目标检测,被称为YOLOv10。广泛的实验表明,YOLOv10在各种模型规模上实现了最先进的性能和效率。例如,我们的YOLOv10-S在COCO上与RT-DETR-R18具有相似的AP时,速度是其1.8倍,同时参数和浮点运算(FLOPs)数量分别减少了2.8倍。与YOLOv9-C相比,YOLOv10-B在相同性能下延迟减少了46%,参数减少了25%。
2. 主要创新点

2.1. 引入了一种双重标签分配策略
其核心思想便是在训练阶段使用一对多的检测头提供更多的正样本来丰富模型的训练;而在推理阶段则通过梯度截断的方式,切换为一对一的检测头,如此一来便不在需要 NMS 后处理,在保持性能的同时减少了推理开销。
YOLOv10的检测头相关代码如下:
#https://github.com/THU-MIG/yolov10/blob/main/ultralytics/nn/modules/head.py
class v10Detect(Detect):max_det = -1def __init__(self, nc=80, ch=()):super().__init__(nc, ch)c3 = max(ch[0], min(self.nc, 100)) # channelsself.cv3 = nn.ModuleList(nn.Sequential(nn.Sequential(Conv(x, x, 3, g=x), Conv(x, c3, 1)), \nn.Sequential(Conv(c3, c3, 3, g=c3), Conv(c3, c3, 1)), \nn.Conv2d(c3, self.nc, 1)) for i, x in enumerate(ch))self.one2one_cv2 = copy.deepcopy(self.cv2)self.one2one_cv3 = copy.deepcopy(self.cv3)def forward(self, x):one2one = self.forward_feat([xi.detach() for xi in x], self.one2one_cv2, self.one2one_cv3)if not self.export:one2many = super().forward(x)if not self.training:one2one = self.inference(one2one)if not self.export:return {"one2many": one2many, "one2one": one2one}else:assert(self.max_det != -1)boxes, scores, labels = ops.v10postprocess(one2one.permute(0, 2, 1), self.max_det, self.nc)return torch.cat([boxes, scores.unsqueeze(-1), labels.unsqueeze(-1)], dim=-1)else:return {"one2many": one2many, "one2one": one2one}def bias_init(self):super().bias_init()"""Initialize Detect() biases, WARNING: requires stride availability."""m = self # self.model[-1] # Detect() module# cf = torch.bincount(torch.tensor(np.concatenate(dataset.labels, 0)[:, 0]).long(), minlength=nc) + 1# ncf = math.log(0.6 / (m.nc - 0.999999)) if cf is None else torch.log(cf / cf.sum()) # nominal class frequencyfor a, b, s in zip(m.one2one_cv2, m.one2one_cv3, m.stride): # froma[-1].bias.data[:] = 1.0 # boxb[-1].bias.data[: m.nc] = math.log(5 / m.nc / (640 / s) ** 2) # cls (.01 objects, 80 classes, 640 img)
2.2 架构改进

- Backbone & Neck:使用了先进的结构如 CSPNet 作为骨干网络,和 PAN 作为颈部网络,优化了特征提取和多尺度特征融合。
- 大卷积核与分区自注意力:这些技术用于增强模型从大范围上下文中学习的能力,提高检测准确性而不显著增加计算成本。
- 整体效率:引入空间-通道解耦下采样和基于秩引导的模块设计,减少计算冗余,提高整体模型效率。
3. 实验结果
表1:与最先进技术的比较。延迟是使用官方预训练模型测量的。延迟指标指的是模型前向传播过程中的延迟,不包括后处理。†表示使用原始的一对多训练并采用NMS的YOLOv10的结果。以下所有结果都没有采用额外的高级训练技术,如知识蒸馏或PGI,以进行公平比较。

平均精度(AP),分别减少了 51% 和 61% 的参数以及分别减少了 41% 和 52% 的计算量。在中型模型方面,与 YOLOv9-C 和 YOLO-MS 相比,YOLOv10-B 和 Men 在保持相同或更好的性能的同时,分别实现了 46% 和 62% 的延迟降低。对于大型模型,与 Gold-YOLO-L 相比,我们的 YOLOv10-L 拥有 68% 更少的参数,延迟降低了 32%,并且平均精度提升了 1.4%。此外,与 RT-DETR 相比,YOLOv10 在性能和延迟方面都取得了显著的改进。特别值得注意的是,YOLOv10-S 和 X 在相似的性能条件下,推理速度分别比 RT-DETR-R18 和 R101 快了 1.8 倍和 1.3 倍。这些结果充分展示了 YOLOv10 作为实时端到端检测器的卓越性能。我们还按照原始的一对多训练方法,将 YOLOv10 与其他 YOLO 版本进行了比较。在这种情况下,我们考虑的是模型前向传播过程的性能和延迟,遵循了文献 [56,20,54] 中的方法。正如表 1 所示,YOLOv10 在不同规模的模型上也展现了最先进的性能和效率,这表明了我们架构设计的有效性。
参考博客
YOLOv10 正式发布!原理、部署、应用一站式齐全_yolov10出了么-CSDN博客
相关文章:
目标检测——YOLOv10: Real-Time End-to-End Object Detection
YOLOv10是在YOLOv8的基础上,借鉴了RT-DETR的一些创新点改进出来的 标题:YOLOv10: Real-Time End-to-End Object Detection论文:https://arxiv.org/pdf/2405.14458源码:https://github.com/THU-MIG/yolov10 1. 论文介绍 在过去的几…...

堡垒机简单介绍
堡垒机(Bastion Host),也被称为跳板机、跳板服务器或堡垒服务器,是一种在网络安全中扮演重要角色的设备或服务。以下是关于堡垒机的详细介绍: 一、定义与功能 堡垒机是一种用于控制和管理网络安全的重要工具…...

【星闪开发连载】WS63E 星闪开发板和hi3861开发板的对比
此次星闪开发者体验官活动使用的开发板都是NearLink_DK_WS63E开发板,它和NearLink_DK_WS63开发板的区别在于具有雷达感知功能。从开发板的照片也可以看到WS63E有一个雷达天线接口。 我们把WS63E开发板和hi3861开发板的功能做了简单的对比,见下表。 参数…...
-- Jenkins持续集成)
Python接口自动化测试框架(实战篇)-- Jenkins持续集成
文章目录 一、前言二、[Jenkins](https://www.jenkins.io/)2.1、环境搭建2.2、插件准备2.3、创建job2.4、小结2.5、构建策略2.6、报告展示2.7、扩展三、总结一、前言 温馨提示:在框架需要集成jenkins的时候,一定要注意环境切换问题,如果jenkins和开发环境是同样的系统且都有…...

【leetcode】根据二叉树创建字符串、二叉树的前中后遍历(非递归链表实现二叉树)
Hi~!这里是奋斗的明志,很荣幸您能阅读我的文章,诚请评论指点,欢迎欢迎 ~~ 🌱🌱个人主页:奋斗的明志 🌱🌱所属专栏:数据结构、LeetCode专栏 📚本系…...

【RabbitMQ】RabbitMQ交换机概述
一、交换机的类型 RabbitMQ提供了以下四种主要类型的交换机: 直连交换机(Direct Exchange) 特点:直连交换机是最基本的交换机类型,它根据完全匹配的路由键(Routing Key)将消息路由到绑定的队列…...
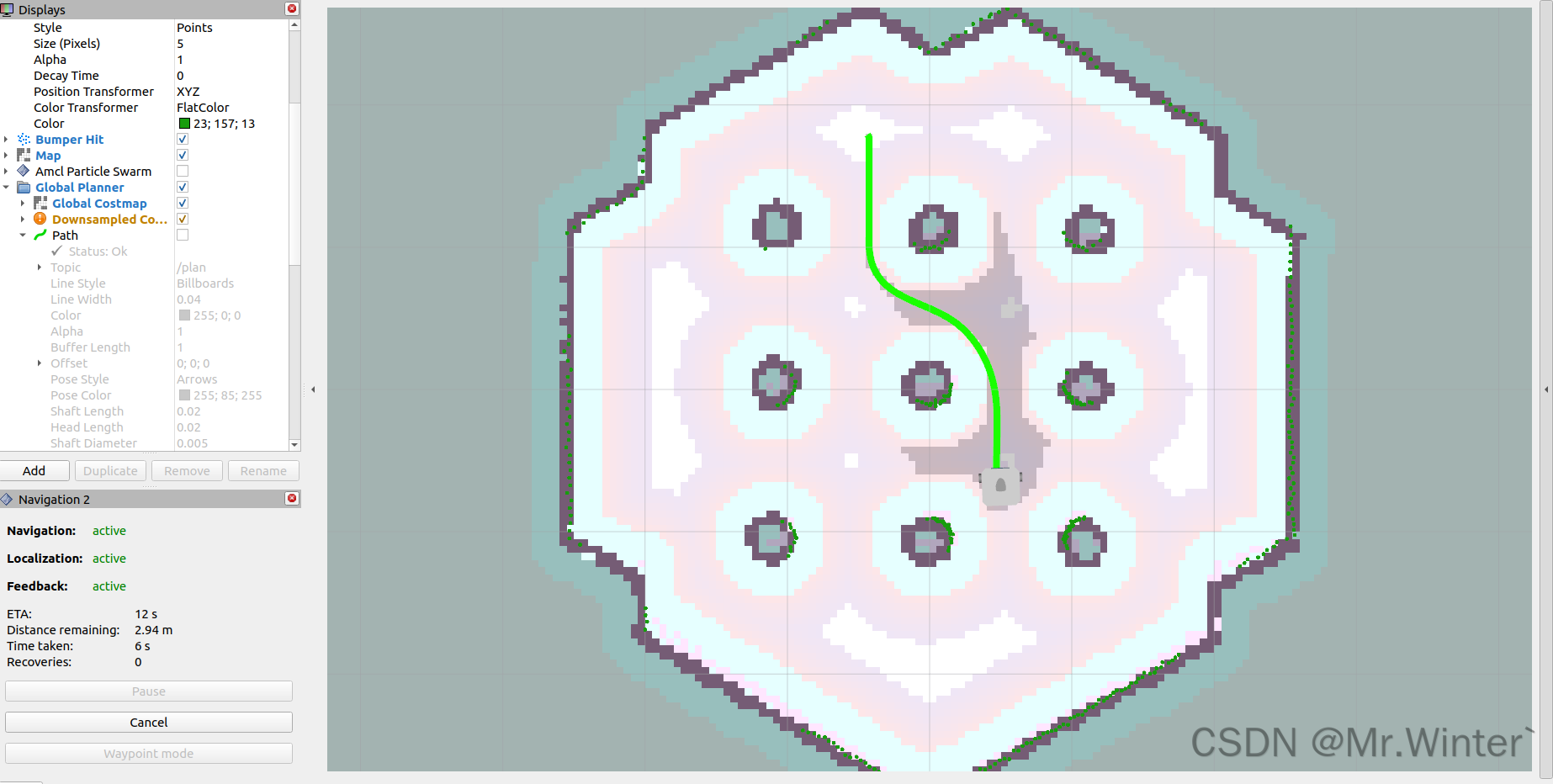
ROS2从入门到精通4-6:路径平滑插件开发案例(以B样条曲线平滑为例)
目录 0 专栏介绍1 ROS2路径平滑器介绍2 平滑器插件编写模板2.1 构造平滑器插件类2.2 注册并导出插件2.3 编译与使用插件 3 基于B样条曲线的路径平滑 0 专栏介绍 本专栏旨在通过对ROS2的系统学习,掌握ROS2底层基本分布式原理,并具有机器人建模和应用ROS2…...

Tensorflow训练视觉模型(CPU)
目录 零、模型下载 一、清理C盘 二、 配置环境 三、运行项目前提操作 (1)根据自己的项目设置路径。每次激活虚拟环境(tensorflow115)都得重设一次 (2)执行setup 这个项目的路径移动了位置也需要重设一…...

从根儿上学习spring 十 之run方法启动第四段(4)
我们接着上一节已经准备开始分析AbstractAutowireCapableBeanFactory#doCreateBean方法,该方法是spring真正开始创建bean实例并初始化bean的入口方法,属于核心逻辑,所以我们新开一节开始分析。 图12 图12-530到536行 这几行的主要就是创建b…...
如果我的发明有修改,需要如何处理?
如果我的发明有修改,需要如何处理?...

java:File与MultipartFile互转
1 概述 当我们在处理文件上传的功能时,通常会使用MultipartFile对象来表示上传的文件数据。然而,有时候我们可能已经有了一个File对象,而不是MultipartFile对象,需要将File对象转换为MultipartFile对象进行进一步处理。 在Java中…...

高级java每日一道面试题-2024年8月04日-web篇-如果客户端禁止cookie能实现session还能用吗?
如果有遗漏,评论区告诉我进行补充 面试官: 如果客户端禁止cookie能实现session还能用吗? 我回答: 当客户端禁用了Cookie时,传统的基于Cookie的Session机制会受到影响,因为Session ID通常是通过Cookie在客户端和服务器之间传递的。然而,尽…...

leetcode 107.二叉树的层序遍||
1.题目要求: 给你二叉树的根节点 root ,返回其节点值 自底向上的层序遍历 。 (即按从叶子节点所在层到根节点所在的层,逐层从左向右遍历)2.此题步骤: 1.先创建好队列,出队和入队函数: //创建队列 typedef struct que…...

C++在网络安全领域的应用
前言: 在当今的数字化时代,网络安全已经成为一个至关重要的领域。随着网络威胁和攻击手段的不断演变,开发高效、安全的系统和工具变得尤为重要。C作为一种功能强大且高性能的编程语言,在网络安全领域发挥着不可替代的作用。本文简…...

Chapter 26 Python魔术方法
欢迎大家订阅【Python从入门到精通】专栏,一起探索Python的无限可能! 文章目录 前言一、什么是魔术方法?二、常见的魔术方法① __init__构造方法② __str__字符串方法③ __lt__比较方法④ __le__比较方法⑤ __eq__比较方法 前言 本章将详细讲…...

基于Transformer的语音识别与音频分类
重磅推荐专栏: 《大模型AIGC》 《课程大纲》 《知识星球》 本专栏致力于探索和讨论当今最前沿的技术趋势和应用领域,包括但不限于ChatGPT和Stable Diffusion等。我们将深入研究大型模型的开发和应用,以及与之相关的人工智能生成内容(AIGC)技术。通过深入的技术解析和实践经…...
)
leetcode数论(1362. 最接近的因数)
前言 经过前期的基础训练以及部分实战练习,粗略掌握了各种题型的解题思路。现阶段开始专项练习。 数论包含最大公约数(>2个数)、最大公约数性质、最小公倍数、区间范围质因素计数(最下间隔)、质因素分解、判断质数、平方根、立方根、互质、同余等等。 描述 给…...

sqli-labs-master less1-less6
目录 通关前必看 1、判断是否存在sql注入以及是字符型还是数值型: 2、各种注入方式以及方法 有回显型: 报错注入(只有ok和no的提示以及报错提示): 详细思路,后面的题都可以这样去思考 关卡实操 less…...

力扣287【寻找重复数】
给定一个包含 n 1 个整数的数组 nums ,其数字都在 [1, n] 范围内(包括 1 和 n),可知至少存在一个重复的整数。 假设 nums 只有 一个重复的整数 ,返回 这个重复的数 。 你设计的解决方案必须 不修改 数组 nums 且只用常…...
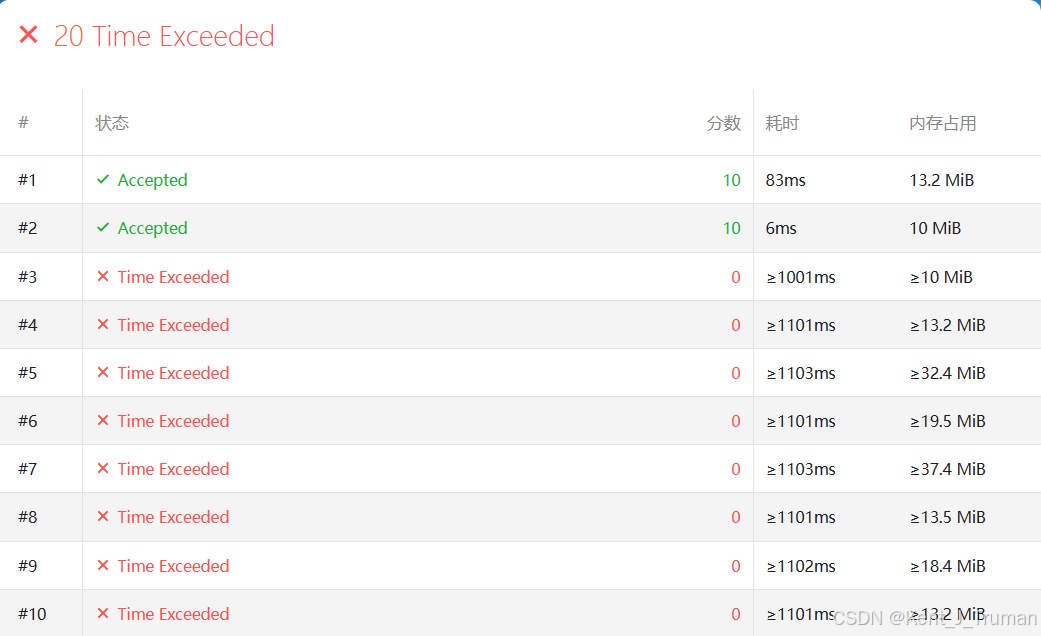
【2024蓝桥杯/C++/B组/传送阵】
题目 问题代码 #include<bits/stdc.h> using namespace std;const int N 1e610; int n; int porter[N]; int ans; int sign[N]; bool used;void dfs(int now, int cnt) {if(sign[now] && used){ans max(ans, cnt);return;}if(!sign[now]){cnt, sign[now] 1; …...
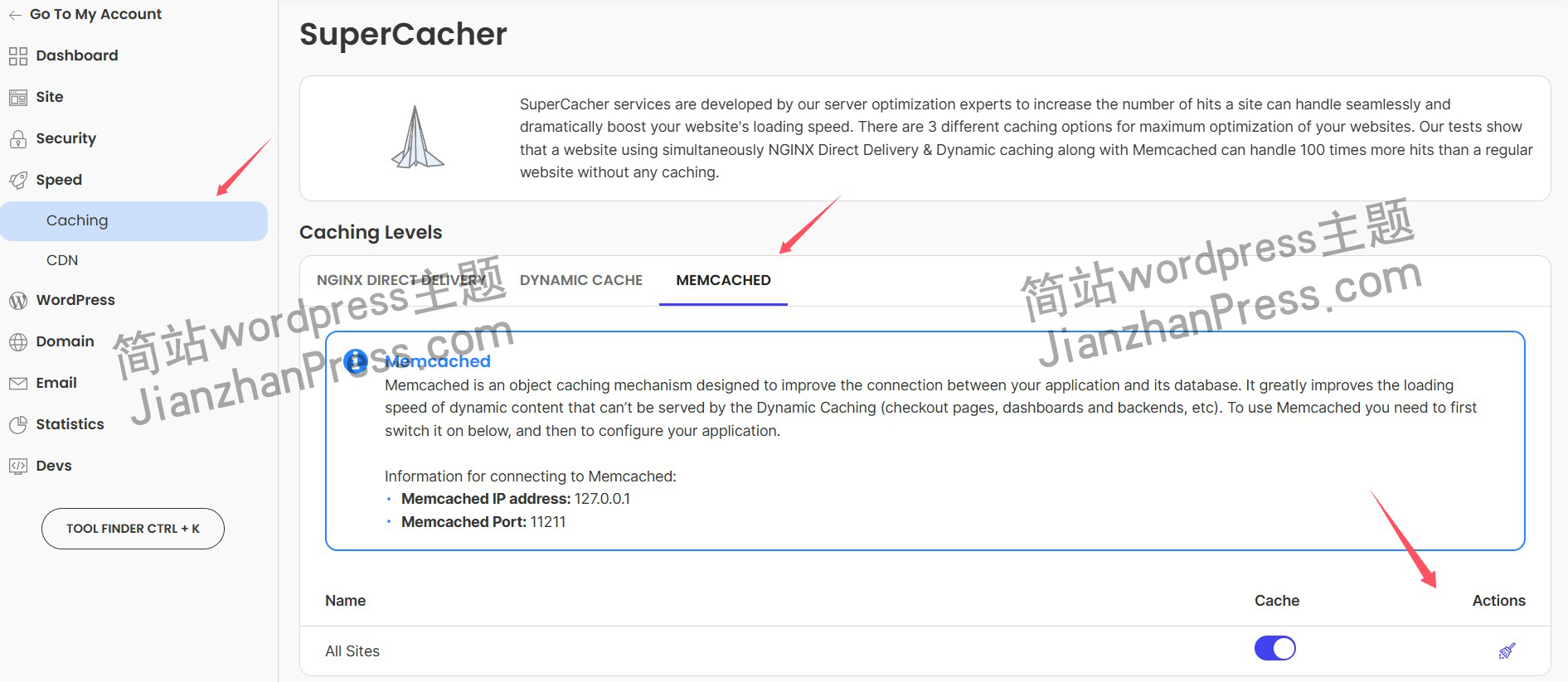
wordpress后台更新后 前端没变化的解决方法
使用siteground主机的wordpress网站,会出现更新了网站内容和修改了php模板文件、js文件、css文件、图片文件后,网站没有变化的情况。 不熟悉siteground主机的新手,遇到这个问题,就很抓狂,明明是哪都没操作错误&#x…...

C++_核心编程_多态案例二-制作饮品
#include <iostream> #include <string> using namespace std;/*制作饮品的大致流程为:煮水 - 冲泡 - 倒入杯中 - 加入辅料 利用多态技术实现本案例,提供抽象制作饮品基类,提供子类制作咖啡和茶叶*//*基类*/ class AbstractDr…...

Linux 文件类型,目录与路径,文件与目录管理
文件类型 后面的字符表示文件类型标志 普通文件:-(纯文本文件,二进制文件,数据格式文件) 如文本文件、图片、程序文件等。 目录文件:d(directory) 用来存放其他文件或子目录。 设备…...
)
云计算——弹性云计算器(ECS)
弹性云服务器:ECS 概述 云计算重构了ICT系统,云计算平台厂商推出使得厂家能够主要关注应用管理而非平台管理的云平台,包含如下主要概念。 ECS(Elastic Cloud Server):即弹性云服务器,是云计算…...
visual studio 2022更改主题为深色
visual studio 2022更改主题为深色 点击visual studio 上方的 工具-> 选项 在选项窗口中,选择 环境 -> 常规 ,将其中的颜色主题改成深色 点击确定,更改完成...
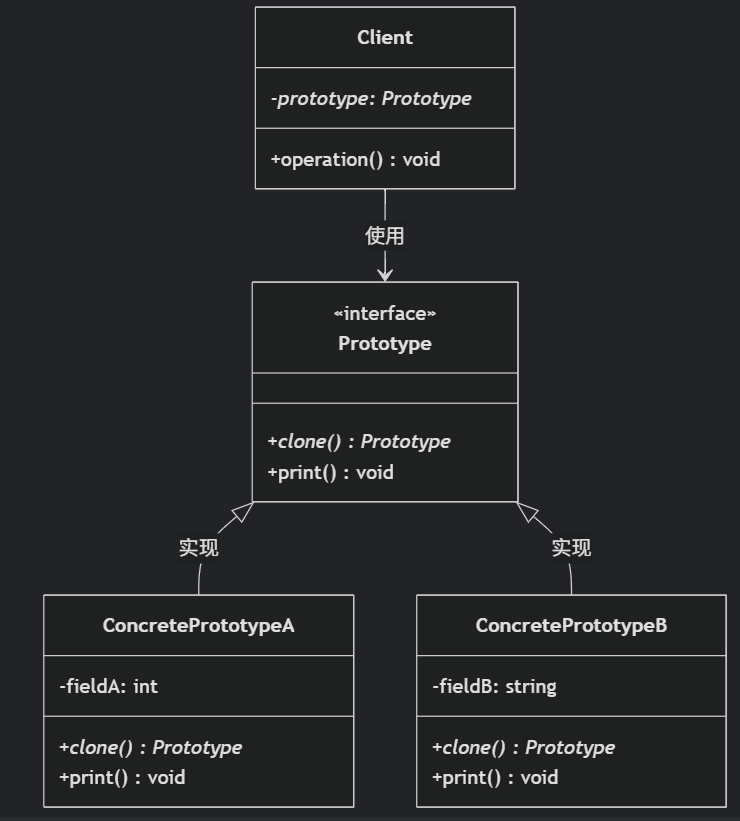
(二)原型模式
原型的功能是将一个已经存在的对象作为源目标,其余对象都是通过这个源目标创建。发挥复制的作用就是原型模式的核心思想。 一、源型模式的定义 原型模式是指第二次创建对象可以通过复制已经存在的原型对象来实现,忽略对象创建过程中的其它细节。 📌 核心特点: 避免重复初…...

高危文件识别的常用算法:原理、应用与企业场景
高危文件识别的常用算法:原理、应用与企业场景 高危文件识别旨在检测可能导致安全威胁的文件,如包含恶意代码、敏感数据或欺诈内容的文档,在企业协同办公环境中(如Teams、Google Workspace)尤为重要。结合大模型技术&…...

HTML前端开发:JavaScript 常用事件详解
作为前端开发的核心,JavaScript 事件是用户与网页交互的基础。以下是常见事件的详细说明和用法示例: 1. onclick - 点击事件 当元素被单击时触发(左键点击) button.onclick function() {alert("按钮被点击了!&…...

AI,如何重构理解、匹配与决策?
AI 时代,我们如何理解消费? 作者|王彬 封面|Unplash 人们通过信息理解世界。 曾几何时,PC 与移动互联网重塑了人们的购物路径:信息变得唾手可得,商品决策变得高度依赖内容。 但 AI 时代的来…...
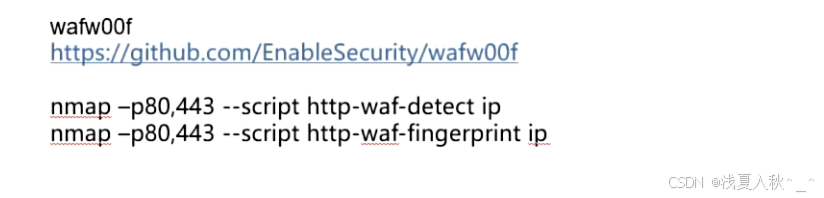
网站指纹识别
网站指纹识别 网站的最基本组成:服务器(操作系统)、中间件(web容器)、脚本语言、数据厍 为什么要了解这些?举个例子:发现了一个文件读取漏洞,我们需要读/etc/passwd,如…...