关于xilinx的FFTIP的使用和仿真
工具:vivado2018.3,modelsim10.6d
场景:在进行数据进行频谱分析的时候,使用FPGA来完成FFT的计算可以加快数据的计算速度。
下面使用仿真完成DDS产生的数据的FFT以及IFFT。原始数据使用DDSIP产生,通过IP产生的波形数据直接输入到FFT进行傅里叶正变换。然后再使用FFT对数据进行IFFT傅里叶逆变换还原波形数据。过程中完成了fftshift(将零频分量搬移到频谱中心),以及使用cordic计算平方根的过程。
FFT端口说明

| 端口名称 | 方向 | 描述 |
| aclk | I | 时钟 |
| aresetn | I | 复位 |
| s_axis_config_tvalid | I | 配置有效 |
| s_axis_config_tready | O | 配置准备好 |
| s_axis_config_tdata | I | 针对配置通道的TDATA。携带配置信息: CP_LEN、FWD/INV、NFFT和SCALE_SCH。关于FWD/INV为FFTIP的方式,1为FFT,0为IFFT。当选择FFT点数可配置时NFFT为点数。SCALE_SCH为缩放计划,以确保在计算过程中不溢出。对于不同的IO架构有不同的规则。 |
| s_axis_data_tdata | I | 输入数据 |
| s_axis_data_tvalid | I | 数据有效 |
| s_axis_data_tready | O | 数据准备好 |
| s_axis_data_tlast | I | 输入的一帧最后一个数据 |
| m_axis_data_tvalid | O | 输出数据有效 |
| m_axis_data_tready | I | 输出数据准备好 |
| m_axis_data_tdata | O | 输出数据 |
| m_axis_data_tuser | O | 输出数据状态参数。包含XK_INDEX, OVFLO, and BLK_EXP. XK_INDEX输出数据索引 OVFLO溢出标志 |
| m_axis_data_tlast | O | 输出的最后一个数据。 |
| m_axis_status_tvalid | O | 状态有效 |
| m_axis_status_tready | I | 状态准备好 |
| m_axis_status_tdata | O | 状态数据。包含每一帧的状态休息。 |
| event_frame_started | O | 事件帧开始 |
| event_tlast_unexpected | O | 当核心在不是帧中最后一个的数据样本上看到s_axis_data_tlast高时有效 |
| event_tlast_missing | O | 当一帧的最后一个数据样本上的s_axis_data_tlast为低时断言。 |
| event_fft_overflow | O | 当正在从数据输出通道卸载的数据样本中出现溢出时断言。仅在溢出是一个有效的选项时才会出现。 |
| event_data_in_channel_halt | O | 当核心从数据输入通道请求数据而没有数据可用时断言。 |
| event_data_out_channel_halt | O | 当核心从数据输入通道请求数据而没有数据可用时断言。 |
| event_status_in_channel_halt | O | 当核心试图将数据写入状态通道而无法这样做时,将被断言。仅在非实时模式下出现。 |
FFT IP的配置界面

Channels:从1到12中选择通道数。三种Burst I/O架构均可使用多通道操作。对于浮点格式,通道必须为1。
Transform Length: 选择一次处理所需点的大小。
The Pipelined Streaming I/O:运行连续处理。
Radix-4,Radix-2,Radix-2 Lite Burst I/O。几种不同的实现方式,延迟依次增大,资源依次减少。
Run time configurable Transform Length:允许运行的过程中改变点数。勾选此后注意,s_axis_config_tdata的字段的意义。

DataFormat:选择输入和输出数据样本是否为定点格式,或在IEEE-754单精度(32位)浮点格式中。浮点格式不是当核心处于多通道配置时可用。
Scaling Options:
Scaling:用户自定义缩放格式。注意s_axis_config_tdata的字段需要配置每个阶段的缩放信息。
Block Floating-Point:由核心来判断所需的缩放程度,以实现对可用动态范围的最佳利用,并以块指数的形式报告缩放因子。注意m_axis_data_tuser字段的块指数报告。
Output ordering:自然顺序和反转顺序。这里使用自然顺序。
Optional Output Fields:XK_INDEX,输出数据索引。

资源消耗设置界面。
关于matlab仿真,产生1MHZ的正弦波余弦波信号,采样率为100MHZ。共计1024个点。对其进行FFT。
matlab仿真程序
% 生成正弦波
fc = 1e6; % 频率
fs = 100e6; % 采样率
t1 = 0:1/fs:1e-3; % 时间序列,1微秒
t = t1(1:1024); %RW需要取整数计算出的频率是真实sin_wave = sin(2 * pi * fc * t);
cos_wave = cos(2 * pi * fc * t);% 复数
plural_wave = cos_wave+ 1i*sin_wave;% 加噪声
data =awgn(cos_wave,100) ;
% data =awgn(plural_wave,100) ;% 绘制原始正弦波数据
figure;
subplot(1,1,1);
plot(t*1e9, imag(plural_wave));
title('原始正弦波');
xlabel('时间 (ns)');
ylabel('幅值');%%做FT变化,算平均功率谱,并画谱输出
FFT_data = data; N = length(FFT_data); w = blackman(N);Fs =100e6;
% Sf_I_Q_wave=fftshift(fft((FFT_data).*w',N)*2.381);
% w = gausswin(N);%高斯窗函数,窗长度为N
gauss_data = fft((FFT_data).*w',N)*2.396;%%做FFT变换,加窗并还原窗系数
Sf_I_Q_wave=fftshift(gauss_data);
Sf_I_Q_wave_dBm =(abs(Sf_I_Q_wave));
% Sf_I_Q_wave_dBm =20*log10(1/N*abs(Sf_I_Q_wave));
X_freq=Fs.*(-N/2:N/2-1)/N;figure(2);plot(X_freq,Sf_I_Q_wave_dBm);title('plural_wave原始数据普');对实信号余弦波进行傅里叶变换,频谱图如下。

对复信号进行进行傅里叶变换频谱。

在逻辑中我们使用DDSIP来产生我们需要的波形数据。
DDS IP配置界面


可以看到我需要控制DDS的控制字来生成不同频率的波形数据,输出数据的格式为高16位为正弦,低16位为余弦。
输出频率计算公式。
![]()
其中X为频率控制字,Fs采样率,即系统时钟。N为多少位的控制字。要输出1MHZ的波形信号的控制字为X=655。

输出波形正好为一个周期1000ns。即1MHZ。
1024点FFT实信号输入。
FFTSHIFT频谱搬移模块
对于FFTSHIFT模块我们打开matlab帮助后可以发现,搬移的效果就是以频谱中心左右两端谱线互换。

ABS求平方根模块
求复数的模,定义为
复数的
在逻辑中我们使用cordic来计算平方根。
cordicIP配置如下所示

模块仿真
`timescale 1ns / 1ps
//
// Company:
// Engineer:
//
// Create Date: 2024/08/12 14:14:51
// Design Name:
// Module Name: vtf_fft_test
// Project Name:
// Target Devices:
// Tool Versions:
// Description:
//
// Dependencies:
//
// Revision:
// Revision 0.01 - File Created
// Additional Comments:
//
//module vtf_fft_test;
//fft
//input
wire [31:0] s_axis_data_tdata ;
wire s_axis_data_tvalid ;
wire s_axis_data_tready ;
wire s_axis_data_tlast ;
//output
wire [31:0] m_axis_data_tdata ;
wire m_axis_data_tvalid ;
wire m_axis_data_tready ;
wire m_axis_data_tlast ;
wire [23:0] m_axis_data_tuser ; //dds
wire m_dds_tvalid ;
wire [31:0] m_dds_tdata ; //system signal
reg clk ;
reg rst_n ;
reg data_gen ;
reg data_flog ;
reg douta_vld ;
reg [15:0] cnt ; //fftshift
wire [31:0] fftshift_data ; //
wire fftshift_data_valid ; //
wire [9:0] fftshift_cnt ; // //abswire [15:0] abs_data ; // (output)
wire abs_data_valid ; // (output)
//system signal//
assign s_axis_data_tdata = douta_vld ? m_dds_tdata : 32'h0;//给复信号
//assign s_axis_data_tdata = douta_vld ? {16'd0,m_dds_tdata[15:0]} : 32'h0;//实信号
assign s_axis_data_tvalid = douta_vld;
assign s_axis_data_tlast = (cnt == 16'd1023 );assign m_axis_data_tready = 1'b1;//FFT后数据
//取实部
wire [15:0] f_imag ;
wire [15:0] f_real ;
wire [31:0] f_abs ; assign f_imag = m_axis_data_tdata[31:16];
assign f_real = m_axis_data_tdata[15:0];
assign f_abs = f_imag + f_real;//=========================================================
dds_compiler_0 u_dds (.aclk (clk ), // input wire aclk.s_axis_config_tvalid (1'b1 ), // input wire s_axis_config_tvalid.s_axis_config_tdata (16'd655 ), // input wire [15 : 0] s_axis_config_tdata.m_axis_data_tvalid (m_dds_tvalid ), // output wire m_axis_data_tvalid.m_axis_data_tdata (m_dds_tdata ), // output wire [31 : 0] m_axis_data_tdata.m_axis_phase_tvalid ( ), // output wire m_axis_phase_tvalid.m_axis_phase_tdata ( )// output wire [15 : 0] m_axis_phase_tdata
);//=========================================================
xfft_0 u_fft (.aclk ( clk ), // input wire aclk.aresetn ( rst_n ), // input wire aresetn.s_axis_config_tdata (8'd1 ), // input wire [7 : 0] s_axis_config_tdata.s_axis_config_tvalid (1'b1 ), // input wire s_axis_config_tvalid.s_axis_config_tready ( ), // output wire s_axis_config_tready.s_axis_data_tdata (s_axis_data_tdata ), // input wire [31 : 0] s_axis_data_tdata.s_axis_data_tvalid (s_axis_data_tvalid ), // input wire s_axis_data_tvalid.s_axis_data_tready (s_axis_data_tready ), // output wire s_axis_data_tready.s_axis_data_tlast (s_axis_data_tlast ), // input wire s_axis_data_tlast.m_axis_data_tdata (m_axis_data_tdata ), // output wire [31 : 0] m_axis_data_tdata.m_axis_data_tuser (m_axis_data_tuser ), // output wire [23 : 0] m_axis_data_tuser.m_axis_data_tvalid (m_axis_data_tvalid ), // output wire m_axis_data_tvalid.m_axis_data_tready (m_axis_data_tready ), // input wire m_axis_data_tready.m_axis_data_tlast (m_axis_data_tlast ), // output wire m_axis_data_tlast.m_axis_status_tdata ( ), // output wire [7 : 0] m_axis_status_tdata.m_axis_status_tvalid ( ), // output wire m_axis_status_tvalid.m_axis_status_tready (1'b1 ), // input wire m_axis_status_tready.event_frame_started ( ), // output wire event_frame_started.event_tlast_unexpected ( ), // output wire event_tlast_unexpected.event_tlast_missing ( ), // output wire event_tlast_missing.event_status_channel_halt ( ), // output wire event_status_channel_halt.event_data_in_channel_halt ( ), // output wire event_data_in_channel_halt.event_data_out_channel_halt ( )// output wire event_data_out_channel_halt
);//==========================================================
fft_shift u_fft_shift(
//.fft_data (m_axis_data_tdata ), // (input ) .fft_cnt (m_axis_data_tuser[9:0] ), // (input ) .fft_last (m_axis_data_tlast ), // (input ) .fft_data_valid (m_axis_data_tvalid ), // (input ) .fftshift_data (fftshift_data ), // (output) .fftshift_data_valid (fftshift_data_valid ), // (output) .fftshift_cnt (fftshift_cnt[9:0] ), // (output)
//system signal.sys_clk (clk ), // (input ) .rst_n (rst_n )// (input ) );//==========================================================
abs_top u_abs_top(
//.plural_data (fftshift_data[31:0] ), // (input ) (input ).plural_data_valid (fftshift_data_valid ), // (input ) (input ).abs_data (abs_data[15:0] ), // (output) (output).abs_data_valid (abs_data_valid ), // (output) (output)
//system signal.clk (clk ), // (input ) (input ).rst_n (rst_n ) // (input ) (input )
);//==========================================================
xfft_0 u_ifft (.aclk ( clk ), // input wire aclk.aresetn ( rst_n ), // input wire aresetn.s_axis_config_tdata (8'd1 ), // input wire [7 : 0] s_axis_config_tdata.s_axis_config_tvalid (1'b1 ), // input wire s_axis_config_tvalid.s_axis_config_tready ( ), // output wire s_axis_config_tready.s_axis_data_tdata (m_axis_data_tdata ), // input wire [31 : 0] s_axis_data_tdata.s_axis_data_tvalid (m_axis_data_tvalid ), // input wire s_axis_data_tvalid.s_axis_data_tready (m_axis_data_tready ), // output wire s_axis_data_tready.s_axis_data_tlast (m_axis_data_tlast ), // input wire s_axis_data_tlast.m_axis_data_tdata ( ), // output wire [31 : 0] m_axis_data_tdata.m_axis_data_tuser ( ), // output wire [23 : 0] m_axis_data_tuser.m_axis_data_tvalid ( ), // output wire m_axis_data_tvalid.m_axis_data_tready (1'b1 ), // input wire m_axis_data_tready.m_axis_data_tlast ( ), // output wire m_axis_data_tlast.m_axis_status_tdata ( ), // output wire [7 : 0] m_axis_status_tdata.m_axis_status_tvalid ( ), // output wire m_axis_status_tvalid.m_axis_status_tready (1'b1 ), // input wire m_axis_status_tready.event_frame_started ( ), // output wire event_frame_started.event_tlast_unexpected ( ), // output wire event_tlast_unexpected.event_tlast_missing ( ), // output wire event_tlast_missing.event_status_channel_halt ( ), // output wire event_status_channel_halt.event_data_in_channel_halt ( ), // output wire event_data_in_channel_halt.event_data_out_channel_halt ( )// output wire event_data_out_channel_halt
);//================================================================
//================================================================
initial
beginclk = 0;rst_n=0;data_gen =0;#100;rst_n =1;#1000;data_gen =1;#100;data_gen =0;endalways @ (posedge clk or negedge rst_n)
beginif(rst_n == 1'b0)begin data_flog <= 1'b0;endelse if(data_gen == 1'b1)begindata_flog <= 1'b1;end else if(cnt >= 10'd1022)begindata_flog <= 1'b0;end
endalways @ (posedge clk or negedge rst_n)
beginif(rst_n == 1'b0)begin douta_vld <= 1'b0;endelse begindouta_vld <= data_flog;end endalways @ (posedge clk or negedge rst_n)
beginif(rst_n == 1'b0)begin cnt <= 16'd0;endelse if(s_axis_data_tvalid == 1'b1 && s_axis_data_tready == 1'b1)begincnt <= cnt + 1'b1;end else begincnt <= cnt;endend//================================================================
//================================================================always #5 clk = ~clk;endmodule
复信号输入。

实信号输入。

逆傅里叶变换结果

相关文章:
关于xilinx的FFTIP的使用和仿真
工具:vivado2018.3,modelsim10.6d 场景:在进行数据进行频谱分析的时候,使用FPGA来完成FFT的计算可以加快数据的计算速度。 下面使用仿真完成DDS产生的数据的FFT以及IFFT。原始数据使用DDSIP产生,通过IP产生的波形数据…...

ant design pro 如何去保存颜色
上图 就是实现这样的效果 后端是这样的,这个颜色肯定是存到字符串里的 这是第一步 import mongoose, { Schema, Document } from mongoose;interface IDiscountCard extends Document {title: string;subtitle: string;image: string;shopUrl: string;bgColor: s…...

【Hadoop】建立圈内组件的宏观认识
01存储02计算03调度04其他05回忆 众多组件们构建了大规模分布式计算和存储平台。本文介绍Hadoop生态圈中各个组件的主要功能和作用,辅助学者理解每个组件的定位和用途,从而建立对圈内组件的宏观认识。梳理清楚HDFS、MapReduce、YARN、Hive、HBase、Spark…...

C++:命名空间与输入输出
目录 前言 一、命名空间 1.1 namespace的价值 1.2 namespace的定义 1.3 命名空间的使用 二、C输入&输出 前言 C是一种面向对象的计算机程序设计语言,它扩展了C语言的功能,并引入了面向对象编程的概念,如类、继承和多态等&a…...

Azure DevOps Server 数据库日志已满,TF30042: The database is full
Contents 1. 问题描述2. 处理方式 2.1 系统备份2.2 收缩日志2.3 恢复模式2.4 日志增长无法控制 1. 问题描述 Azure DevOps Server 作为微软的软件开发管理平台产品,理所当然地使用了微软的数据库软件SQL Server。 在一个大型的开发团队中,Azure DevOps S…...

[C#]OpenCvSharp 实现Bitmap和Mat的格式相互转换
//转为 bitmap方法一: Bitmap map OpenCvSharp.Extensions.BitmapConverter.ToBitmap(mat); process_pictureBox.Image map; //转为 bitmap方法二: Bitmap map new Bitmap(mat.ToMemoryStream()); process_pictureBox.Image map; //Image img 转为…...

【区块链+金融服务】基于区块链的供应链金融系统 | FISCO BCOS应用案例
传统供应链金融存在着信息不对称、信任问题和繁琐流程等弊端。为了解决这些问题,京北方搭建了基于区块链 的供应链金融系统,提供了更高效、透明、安全和可信的交易环境。 系 统 采 用 FISCO BCOS 为 底 层 链, 技 术 栈 使 用 Java 语 言 进…...

AI语言大模型商业价值深度解析
点击蓝字 关注我 随着人工智能(AI)技术的飞速发展,特别是深度学习算法的进步,AI语言大模型在自然语言处理领域的表现日益突出。国内外多种语言大模型如:OpenAi 的 ChatGpt,阿里通义千问,百度文心…...

理解DDD领域驱动设计思想
一、引言 在软件开发的广袤领域中,领域驱动设计(Domain-Driven Design,简称 DDD)犹如一颗璀璨的明星,备受瞩目。对于期望运用 DDD 开展项目的研发人员而言,明晰 DDD 的本质是实现其有效应用的基石。需注意…...

音频剪辑软件哪个好用?五大音频剪辑软件分享
如果你正打算在家自学视频制作,那么恭喜你,你已经踏上了一段充满魔法与惊喜的旅程!不过,别忘了,视频的灵魂不仅仅在于画面,更在于那直击心灵的音效。 想象一下,一个精心剪辑的片段,…...

12.2 使用prometheus-sdk向pushgateway打点
本节重点介绍 : 使用golang sdk打prometheus4种指标,推送到pushgateway gauge、counter、histogram、summary的初始化4种类似的设置值的方法推送到pushgateway的方法 prometheus配置采集pushgateway,grafana上配大盘 golang-sdk 项目地址 https://git…...

HTTPS 详解
HTTPS 是以安全为目标的 HTTP 通道,它在 HTTP 中加入 SSL 层以提高数据传输的安全性。HTTP 被用于在 Web 浏览器和网站服务器之间传递信息,但以明文形式发送内容,不提供任何方式的数据加密,如果攻击者截取了 Web 浏览器和网站服务…...

Microsoft Edge 使用方法与秘诀概览
目录 编辑引言 Microsoft Edge 功能与技巧概览 掌握这些设置技巧,让 Edge 浏览器的体验更干净 1. 使用阅读视图 2. 开启广告过滤 3. 管理扩展 4. 个性化新标签页 5. 使用网页截图 6. 清理浏览器缓存 7. 管理启动设置 8. 自定义地址栏建议 9. 使用内置笔…...

【视频】onvif、RTP、RTCP、SDP、RTSP、gb21818区别
ONVIF (Open Network Video Interface Forum): ONVIF是一个全球性的开放网络视频接口论坛,致力于发展基于IP网络的物联网设备的标准化。它提供了一个通用的标准接口,使不同厂商生产的网络视频产品能够互相兼容。 RTP (Real-time Transport Protocol): R…...

8-4 循环神经网络
对于 (8.4.2)中的函数 f f f,隐变量模型不是近似值。 毕竟 h t h_{t} ht是可以仅仅存储到目前为止观察到的所有数据, 然而这样的操作可能会使计算和存储的代价都变得昂贵。 回想一下,我们在前面讨论过的具有隐藏单元的隐藏层。 值得注意的…...

Linux系统编程 --- 多线程
线程:是进程内的一个执行分支,线程的执行粒度,要比进程要细。 一、线程的概念 1、Linux中线程该如何理解 地址空间就是进程的资源窗口。 在一个程序里的一个执行路线就叫做线程(thread)。更准确的定义是࿱…...

Grafana中的rate与irate以及histogram
用法 rate rate函数用于计算一个时间序列在给定时间范围内的平均速率。它对每个数据点进行线性插值来计算速率,因此对于平滑和稳定的数据来说,rate是一个不错的选择。语法如下: rate(metric_name[time_range])metric_name: 指标名称。time…...

什么是网络安全态势感知
态势感知是一种基于环境的、动态、整体地洞悉安全风险的能力,是以安全大数据为基础,从全局视角提升对安全威胁的发现识别、理解分析、响应处置能力的一种方式、最终是为了决策与行动,是安全能力的落地 态势感知的重要性 随着网络与信息技术的…...

php 在app中唤起微信app进行支付,并处理回调通知
<?phpnamespace app\api\controller;use think\facade\Db; use think\facade\Log;class Wxzf {...
高效同步与处理:ADTF流服务在自动驾驶数采中的应用
目录 一、ADTF 流服务 1、流服务源(Streaming Source) 2、流服务汇(Streaming Sink) 二、数据链路 1、数据管道(Data Pipe) 2、子流(Substreams) 3、触发管道(Tri…...

基于Flask实现的医疗保险欺诈识别监测模型
基于Flask实现的医疗保险欺诈识别监测模型 项目截图 项目简介 社会医疗保险是国家通过立法形式强制实施,由雇主和个人按一定比例缴纳保险费,建立社会医疗保险基金,支付雇员医疗费用的一种医疗保险制度, 它是促进社会文明和进步的…...
大数据零基础学习day1之环境准备和大数据初步理解
学习大数据会使用到多台Linux服务器。 一、环境准备 1、VMware 基于VMware构建Linux虚拟机 是大数据从业者或者IT从业者的必备技能之一也是成本低廉的方案 所以VMware虚拟机方案是必须要学习的。 (1)设置网关 打开VMware虚拟机,点击编辑…...

电脑插入多块移动硬盘后经常出现卡顿和蓝屏
当电脑在插入多块移动硬盘后频繁出现卡顿和蓝屏问题时,可能涉及硬件资源冲突、驱动兼容性、供电不足或系统设置等多方面原因。以下是逐步排查和解决方案: 1. 检查电源供电问题 问题原因:多块移动硬盘同时运行可能导致USB接口供电不足&#x…...
全球首个30米分辨率湿地数据集(2000—2022)
数据简介 今天我们分享的数据是全球30米分辨率湿地数据集,包含8种湿地亚类,该数据以0.5X0.5的瓦片存储,我们整理了所有属于中国的瓦片名称与其对应省份,方便大家研究使用。 该数据集作为全球首个30米分辨率、覆盖2000–2022年时间…...

基于当前项目通过npm包形式暴露公共组件
1.package.sjon文件配置 其中xh-flowable就是暴露出去的npm包名 2.创建tpyes文件夹,并新增内容 3.创建package文件夹...
高等数学(下)题型笔记(八)空间解析几何与向量代数
目录 0 前言 1 向量的点乘 1.1 基本公式 1.2 例题 2 向量的叉乘 2.1 基础知识 2.2 例题 3 空间平面方程 3.1 基础知识 3.2 例题 4 空间直线方程 4.1 基础知识 4.2 例题 5 旋转曲面及其方程 5.1 基础知识 5.2 例题 6 空间曲面的法线与切平面 6.1 基础知识 6.2…...

鱼香ros docker配置镜像报错:https://registry-1.docker.io/v2/
使用鱼香ros一件安装docker时的https://registry-1.docker.io/v2/问题 一键安装指令 wget http://fishros.com/install -O fishros && . fishros出现问题:docker pull 失败 网络不同,需要使用镜像源 按照如下步骤操作 sudo vi /etc/docker/dae…...
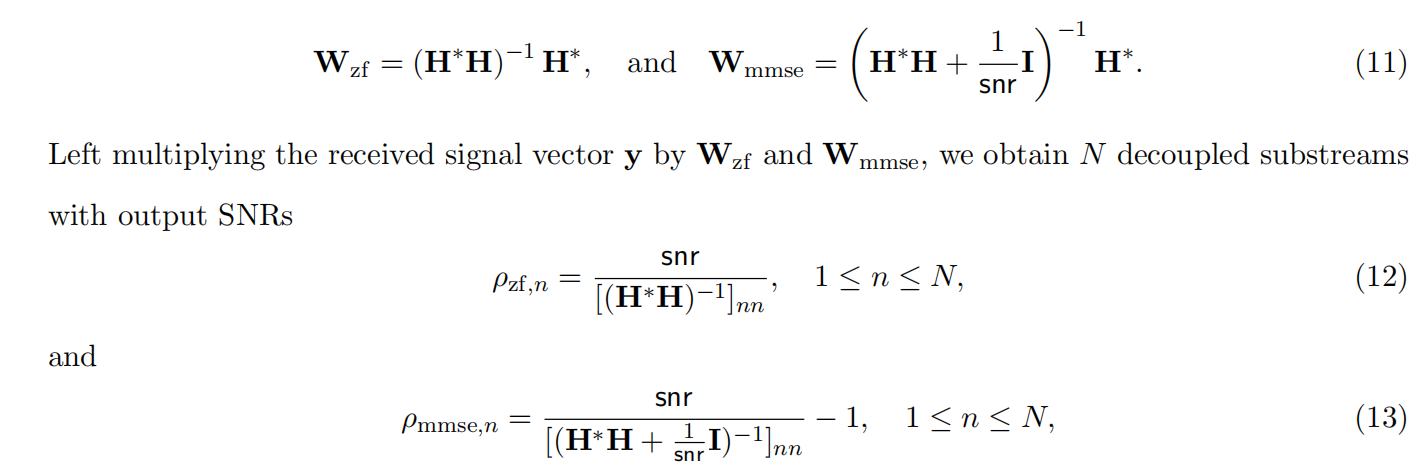
均衡后的SNRSINR
本文主要摘自参考文献中的前两篇,相关文献中经常会出现MIMO检测后的SINR不过一直没有找到相关数学推到过程,其中文献[1]中给出了相关原理在此仅做记录。 1. 系统模型 复信道模型 n t n_t nt 根发送天线, n r n_r nr 根接收天线的 MIMO 系…...

重启Eureka集群中的节点,对已经注册的服务有什么影响
先看答案,如果正确地操作,重启Eureka集群中的节点,对已经注册的服务影响非常小,甚至可以做到无感知。 但如果操作不当,可能会引发短暂的服务发现问题。 下面我们从Eureka的核心工作原理来详细分析这个问题。 Eureka的…...

【无标题】路径问题的革命性重构:基于二维拓扑收缩色动力学模型的零点隧穿理论
路径问题的革命性重构:基于二维拓扑收缩色动力学模型的零点隧穿理论 一、传统路径模型的根本缺陷 在经典正方形路径问题中(图1): mermaid graph LR A((A)) --- B((B)) B --- C((C)) C --- D((D)) D --- A A -.- C[无直接路径] B -…...