STM32——IIC总线(MPU6050应用)
目录
一、IIC介绍
二、MPU6050
三、MPU6050实例
四、EEPROM
----------------------------------------------------------------------------------------------------------------------------
每次都是IIC好没新意啊,我决定这次录视频的时候举两个例子,一个是EEPROM在加上老客户MPU6050.视频老规律录完发bilibili然后放评论区。
----------------------------------------------------------------------------------------------------------------------------
一、IIC介绍
I2C总线介绍
I2C(Inter-Integrated Circuit)总线(也称IIC或I2C)是由PHILIPS公司开发的两线式串行总线,用于连接微控制器及其外围设备,是微电子通信控制领域广泛采用的一种总线标准。它是同步通信的一种特殊形式,具有接口线少,控制方式简单,期间封装形式少,通信速率高等优点。
IIC总线特点
可达3.4Mbit/s。一般通过I2C总线接口可编程时钟来实现传输速率的调整,同时也跟所接的上拉电阻的阻值有关。
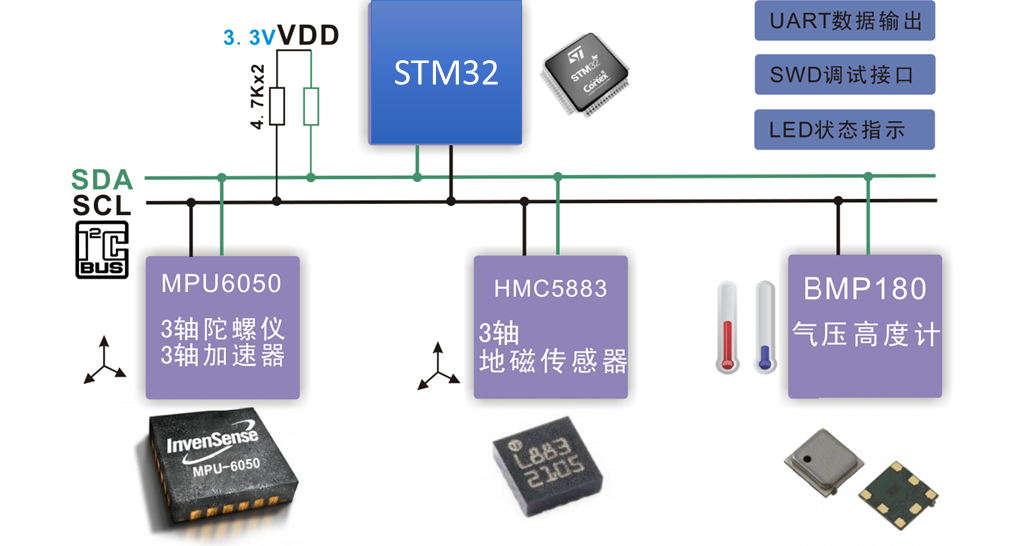
IIC总线拓朴结构
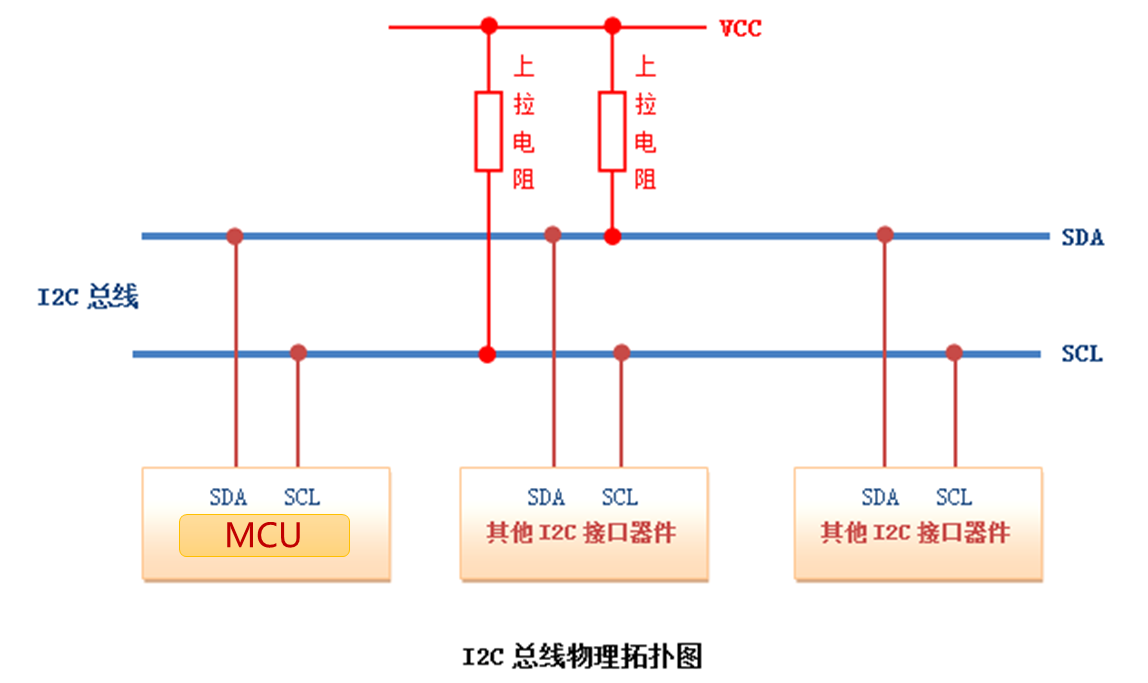
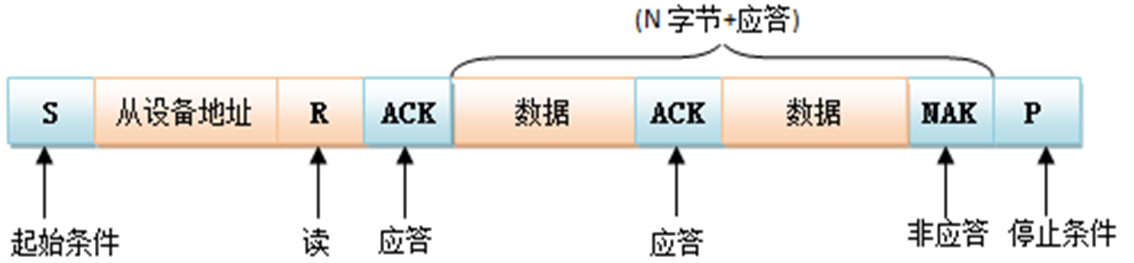
数据传输数据传输以字节为单位 , 主设备在SCL线上产生每个时钟脉冲的过程中将在SDA线上传输一个数据位,数据在时钟的高电平被采样,一个字节按数据位从高位到低位的顺序进行传输
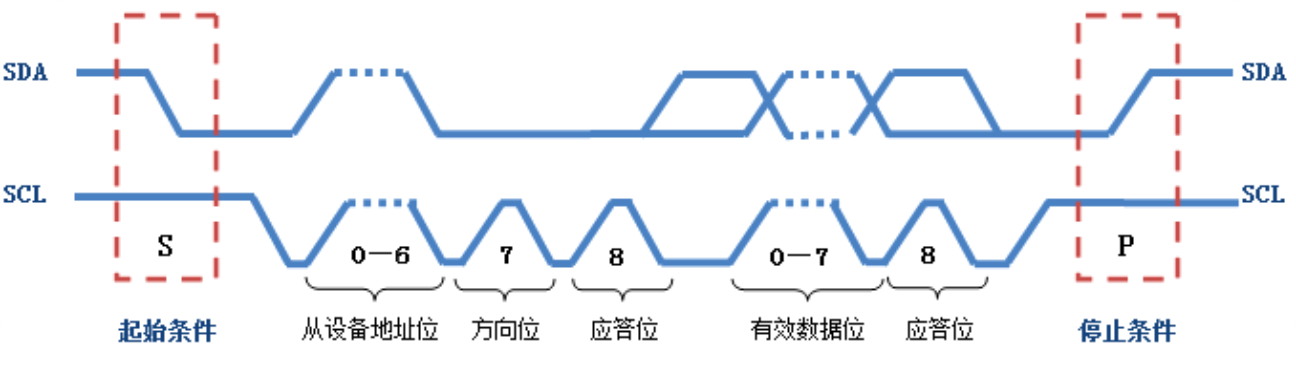
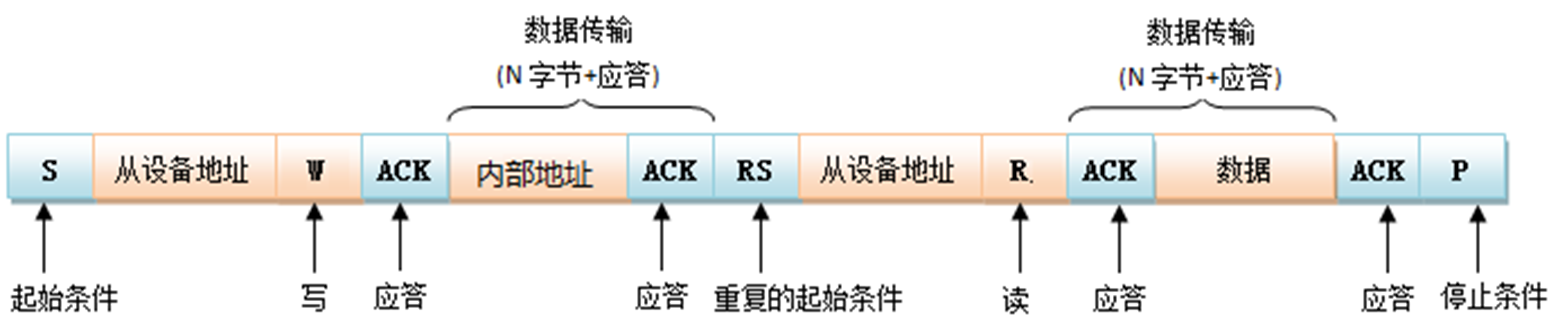
主设备在传输有效数据之前 要先指定从设备的地址,一般为7位,然后再发生数据传输的方向位, 0表示主设备向从设备写数据,1表示主设备向从设备读数据
应答信号接收数据的器件在接收到 8bit 数据后,向发送数据的器件发出低电平的应答信号,表示已收到数据。这个信号可以是主控器件发出,也可以是从动器件发出。总之,由接收数据的器件发出。
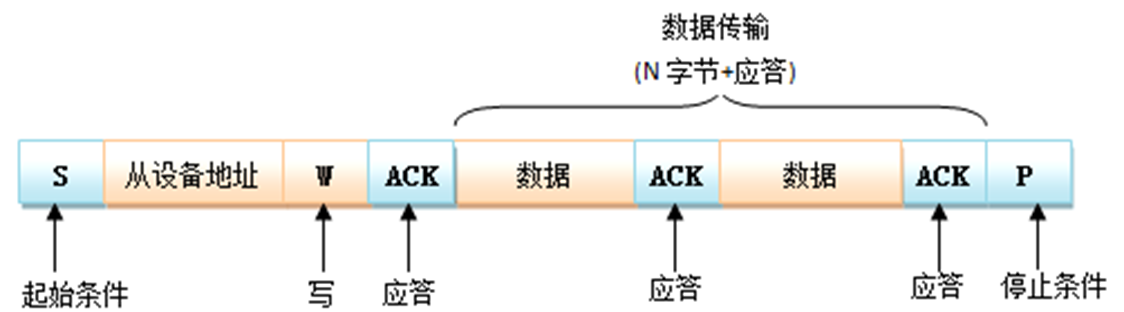
主设备给从设备发数据
主设备读从设备数据
主设备读从设备某个寄存器
软件模拟IIC
由于直接控制 GPIO 引脚电平产生通讯时序时,需要由 CPU 控制每个时刻的引脚状态,所以称之为“软件模拟协议”方式。
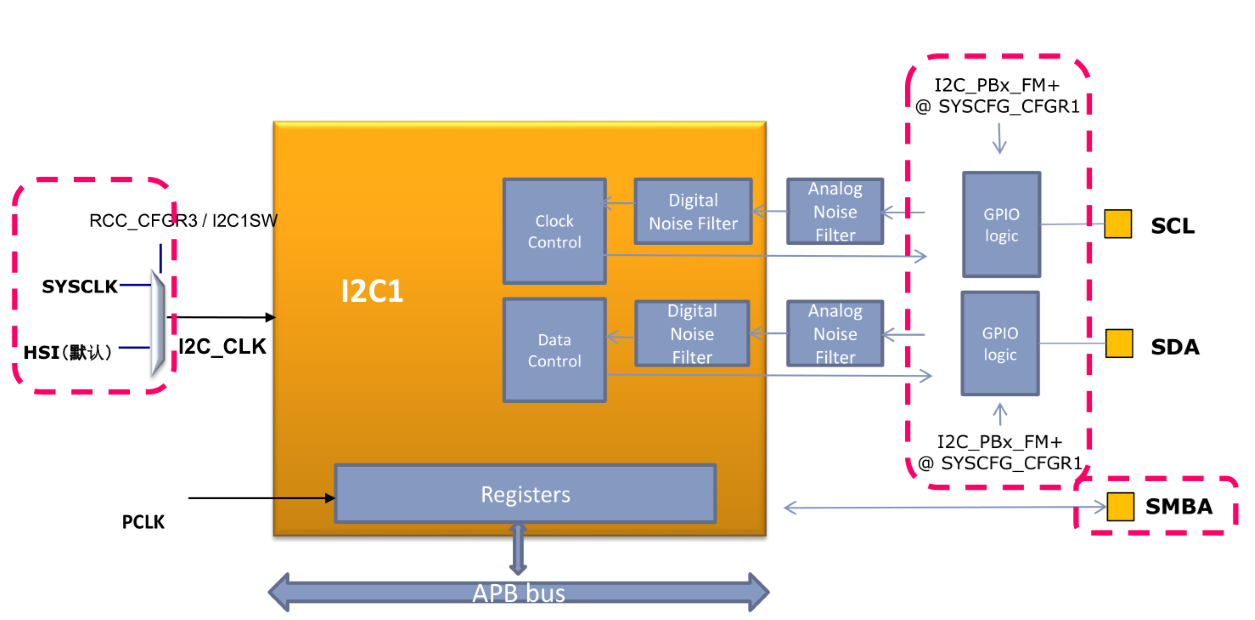
硬件控制IIC
STM32 的 I2C 片上外设专门负责实现 I2C 通讯协议,只要配置好该外设,它就会自动根据协议要求产生通讯信号,收发数据并缓存起来,CPU只要检测该外设的状态和访问数据寄存器,就能完成数据收发。这种由硬件外设处理 I2C协议的方式减轻了 CPU 的工作,且使软件设计更加简单。
IIC的特点
● I2C总线规范 rev03 兼容性:
- 从机模式和主机模式
- 多主机功能
- 标准模式(高达 100kHz )
- 快速模式(高达 400kHz )
- 超快速模式(高达 1 MHz )
- 7 位和 10 位地址模式
- 软件复位
● 1 字节缓冲带 DMA 功能
64KB片上闪存的F0带2个I2C:I2C1和I2C232KB片上闪存的F0只带1个I2C:I2C1I2C2比I2C1所支持的功能少些,不具备对SMBus的硬件支持
20mA的驱动能力
模块双时钟域以及从停止模式唤醒

二、MPU6050
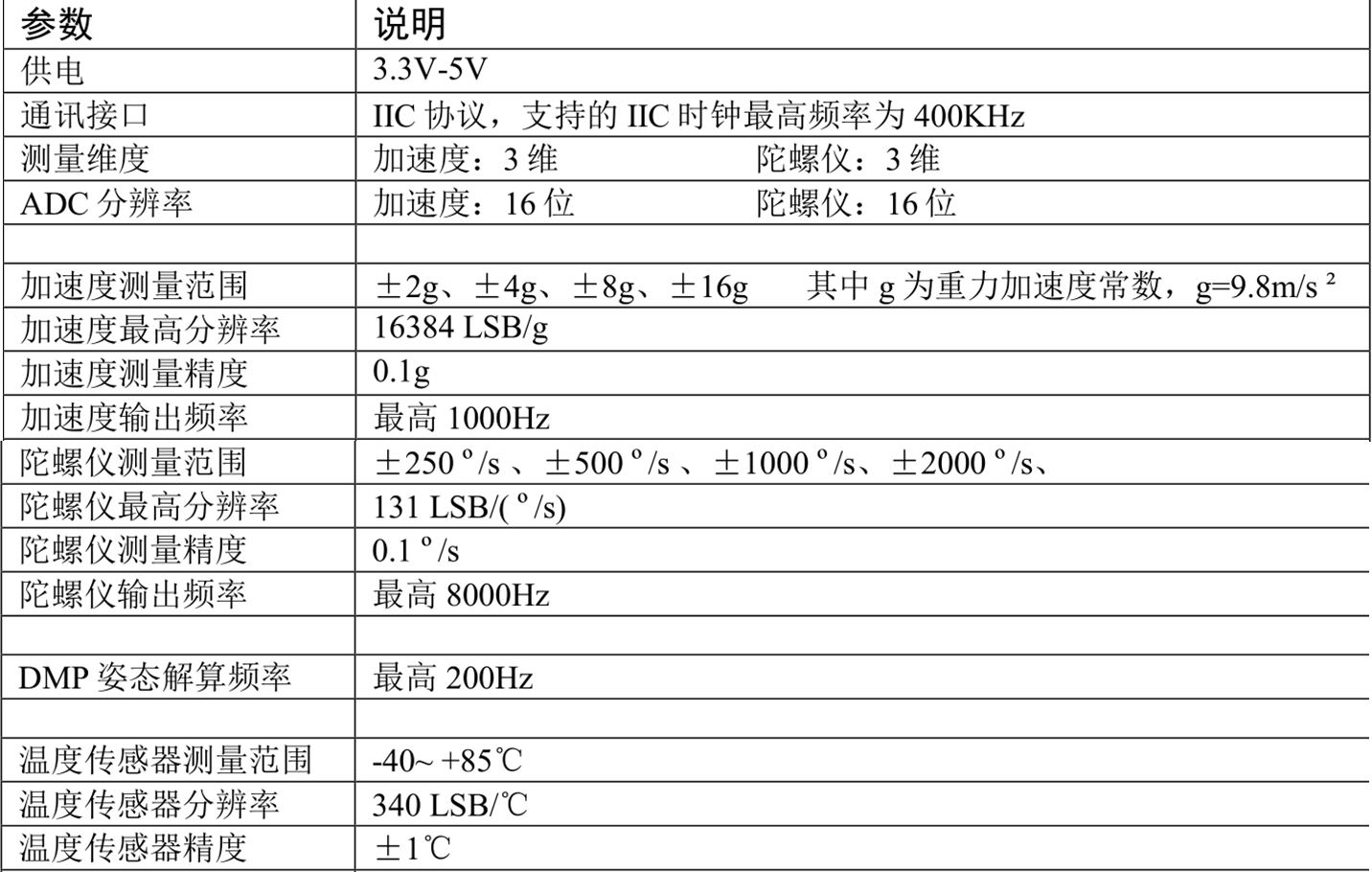
MPU-6050 是全球首例 6轴运动处理传感器。它集成了 3 轴 MEMS 陀螺仪,3 轴 MEMS 加速度计,以及一个可扩展的数字运动处理器 DMP(Digital Motion Processor),可用I2C 接口连接一个第三方的数字传感器,比如磁力计。扩展之后还可以通过其 I2C 输出一个 9 轴的信号。MPU-6050 也可以通过其 I2C 接口连接非惯性的数字传感器,比如压力传感器。
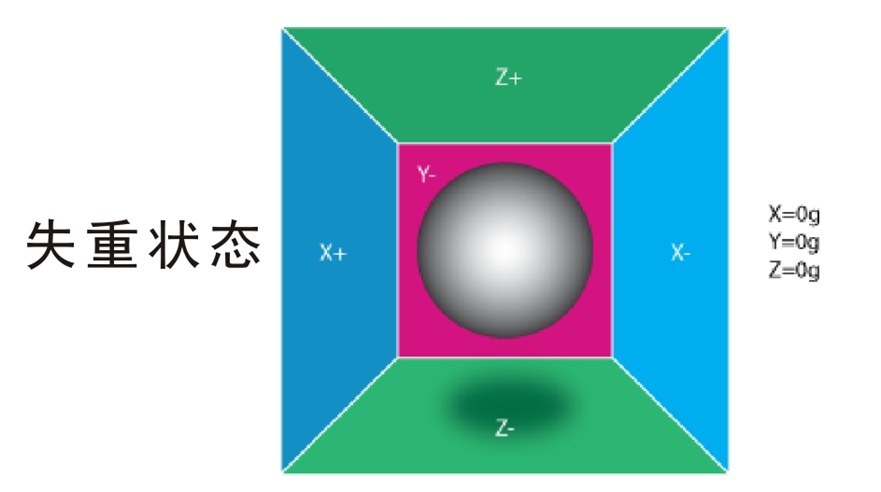
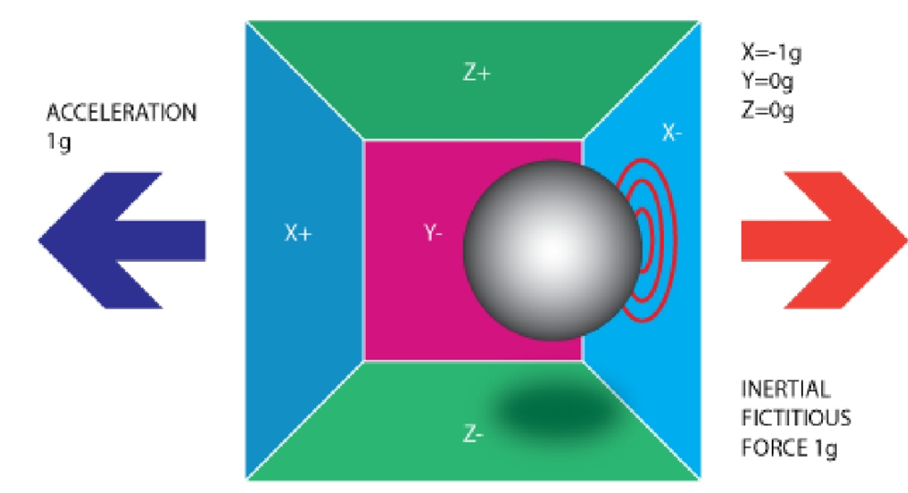
注意:加速度测量计反应的加速向量与当前的受力方向是相反的,如上图,受力方向向左,但是加速度的向量方向为右
陀螺仪,是用来测量角速度的,单位为度每秒(deg/s)
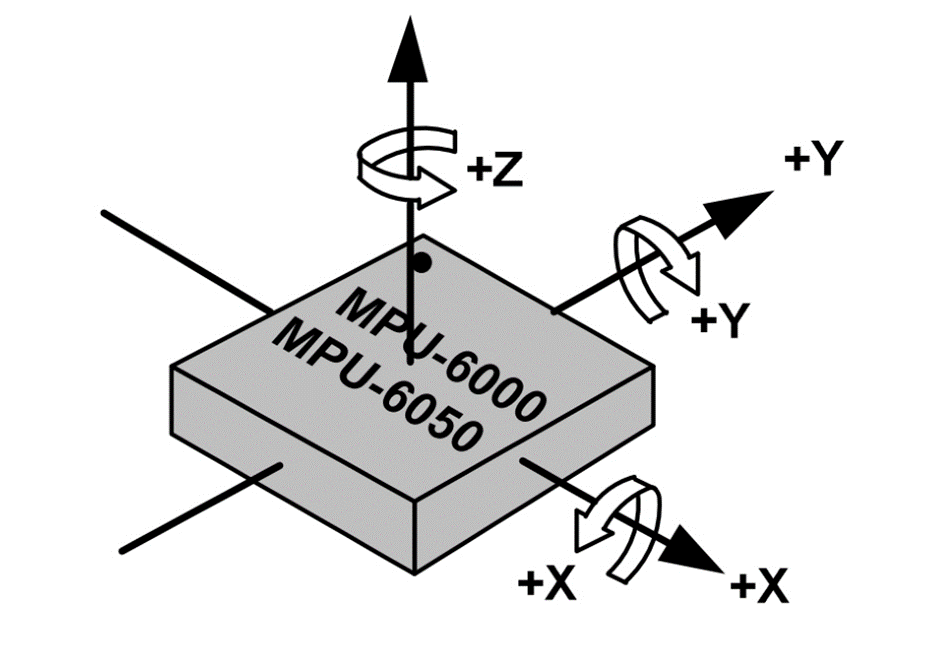
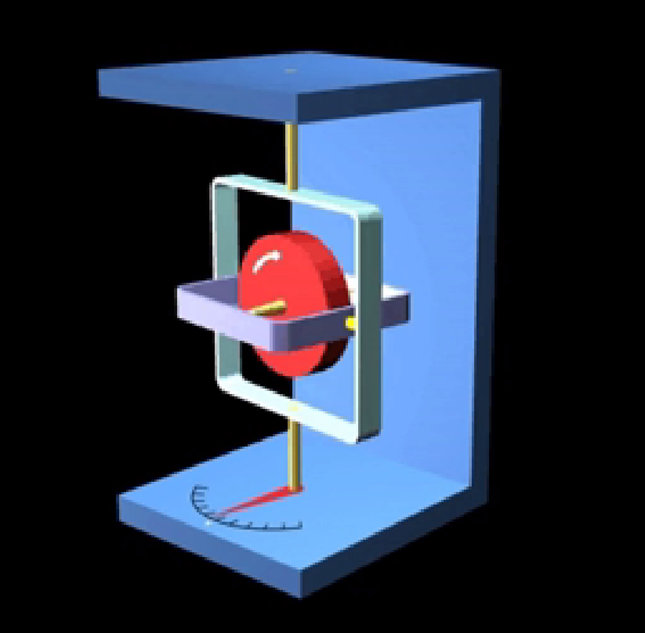
一个旋转物体的旋转轴所指的方向在不受外力影响时,是不会改变的。人们根据这个道理,用它来保持方向。Mpu6050有3个陀螺仪,可测X,Y,Z方向的角速度值
POWER MANAGEMENT电源管理寄存器
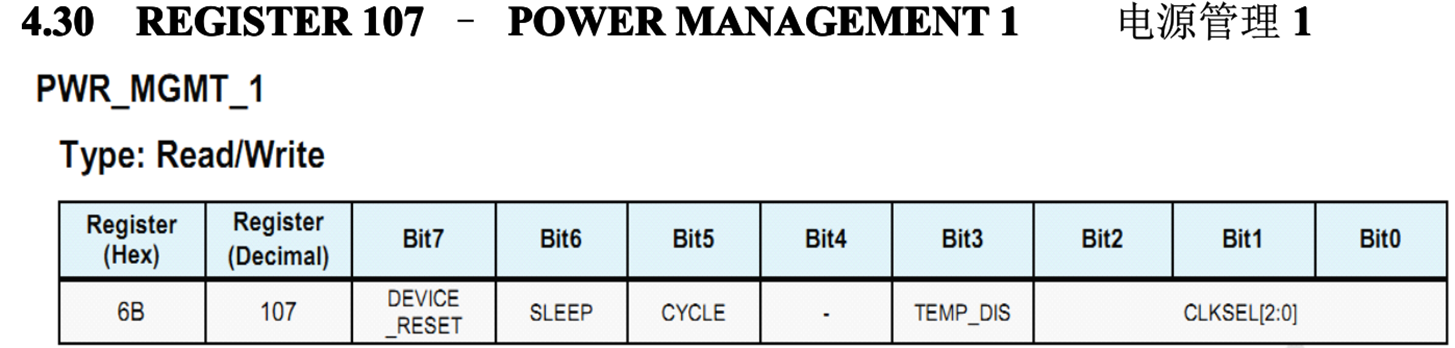
//解除休眠状态
I2C_WriteReg(MPU6050_RA_PWR_MGMT_1, 0x00);
SAMPLE RATE DIVIDER 采样频率分频器
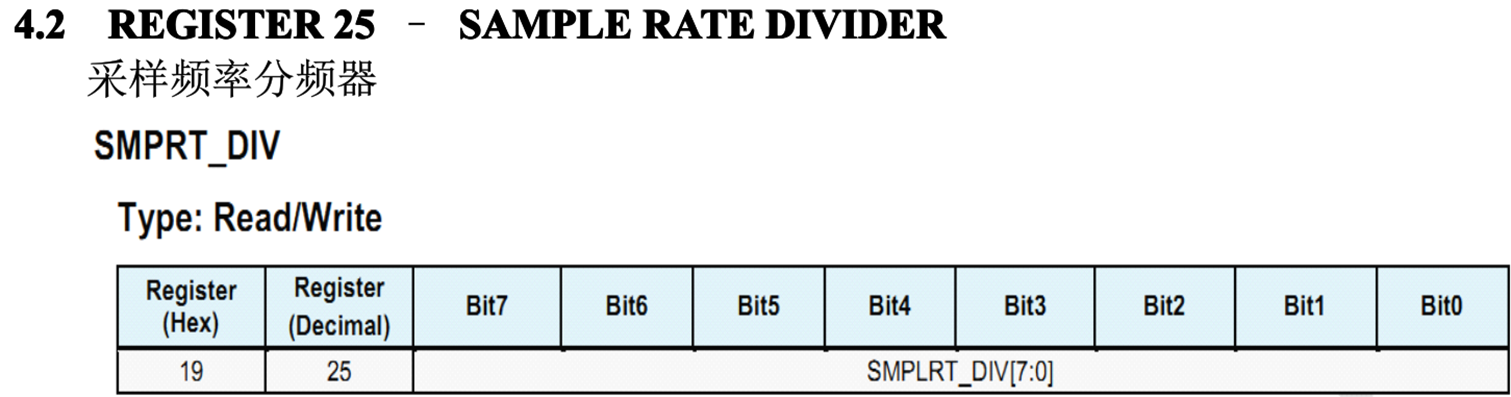
//陀螺仪采样率,1KHz
I2C_WriteReg(MPU6050_RA_SMPLRT_DIV , 0x07);
CONFIGURATION 低通滤波配置寄存器
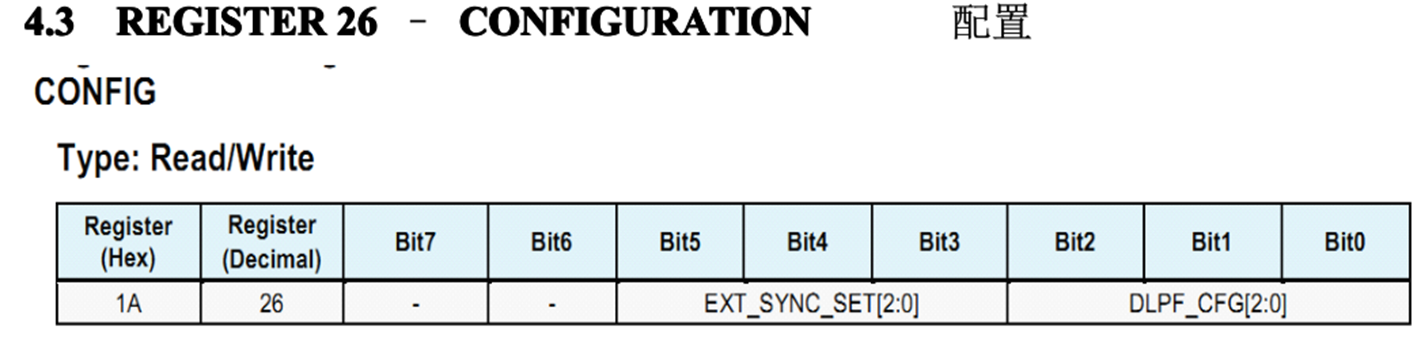
//低通滤波频率,典型值:0x06(带宽5KHz)
I2C_WriteReg(MPU6050_RA_CONFIG , 0x06);
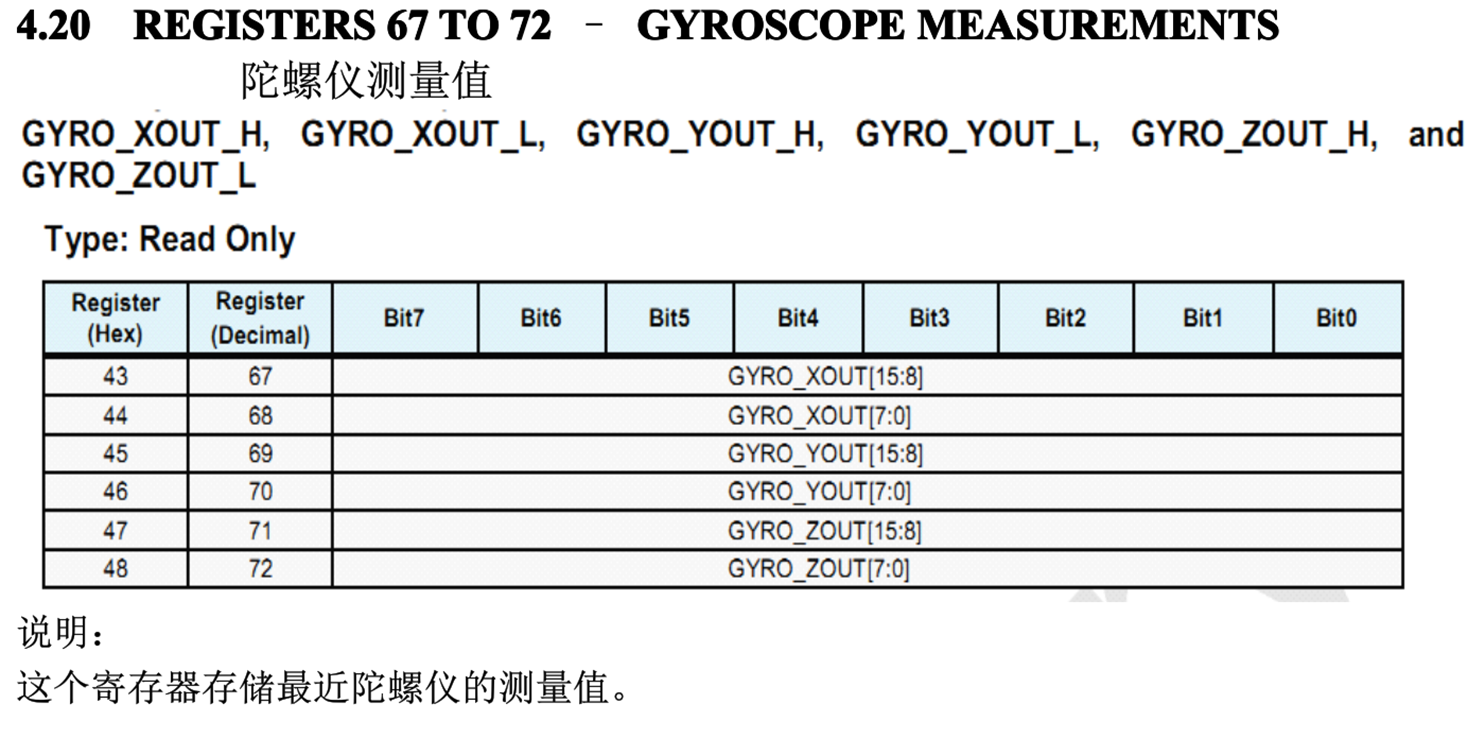
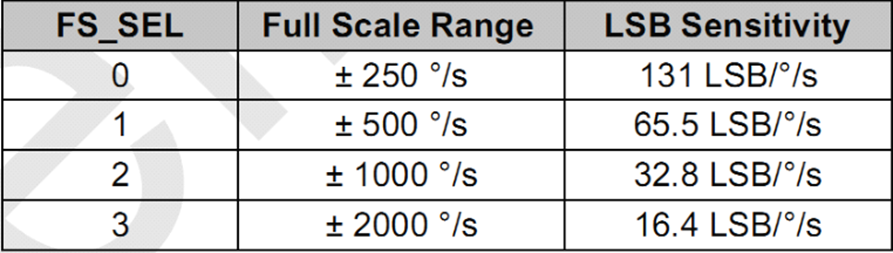
GYROSCOPE CONFIGURATION 陀螺仪配置寄存器
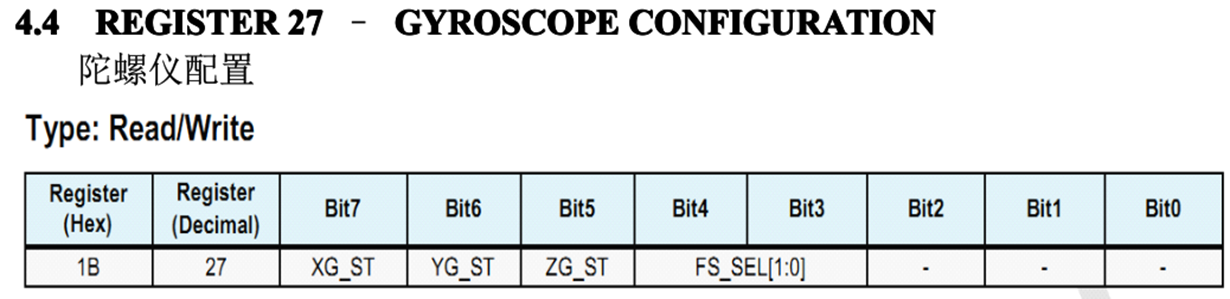
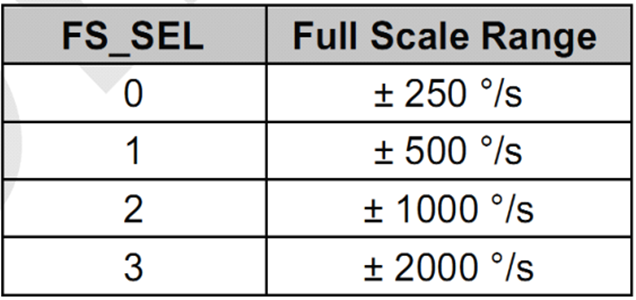
该寄存器是用来触发陀螺仪自检和配置陀螺仪的满量程范围。
陀螺仪自检及测量范围,典型值:0x18(不自检,2000deg/s)
I2C_WriteReg(MPU6050_RA_GYRO_CONFIG, 0x18);
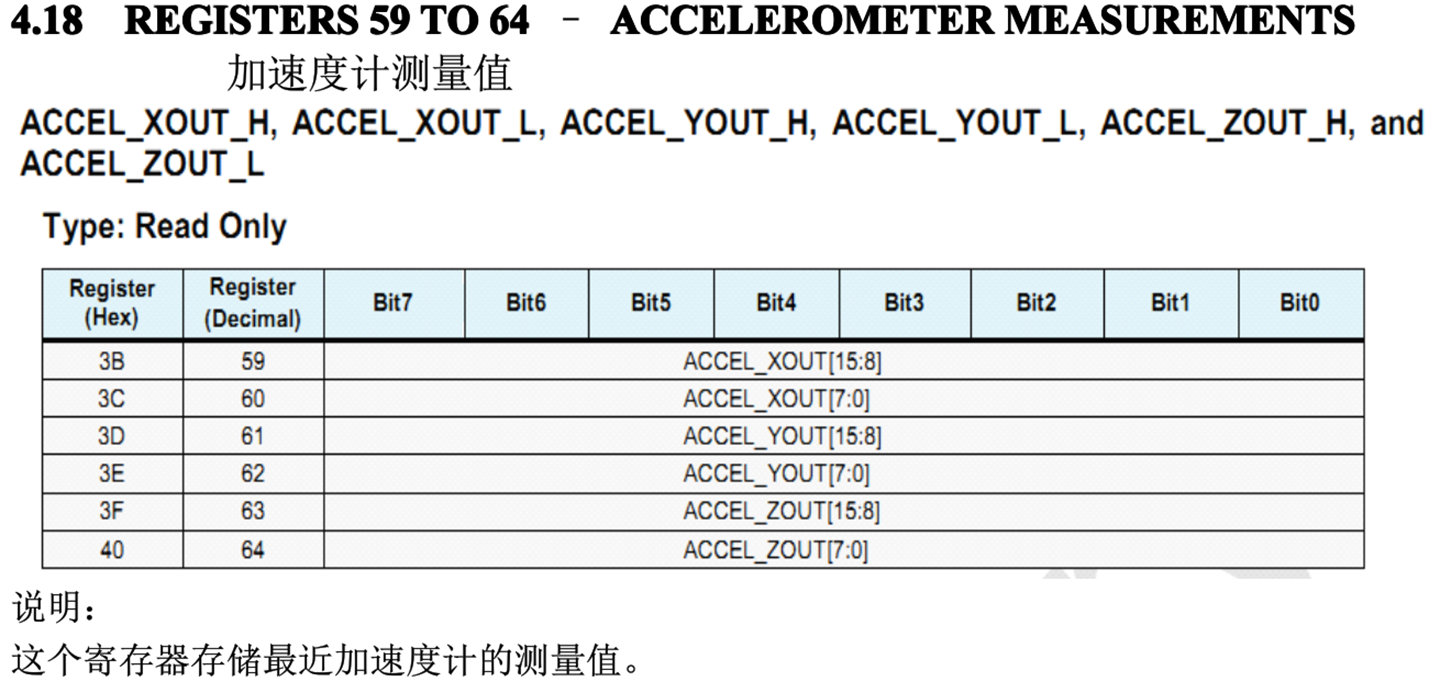
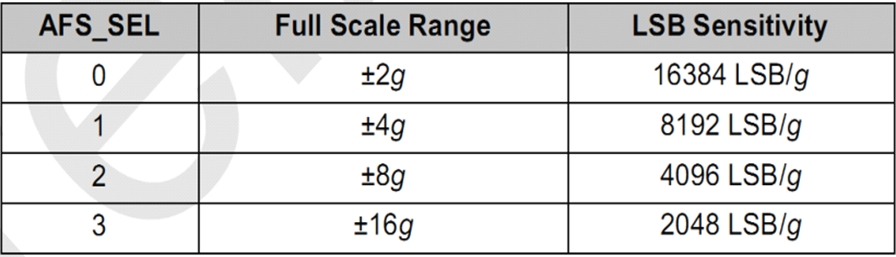
ACCELEROMETER CONFIGURATION 加速度配置寄存器
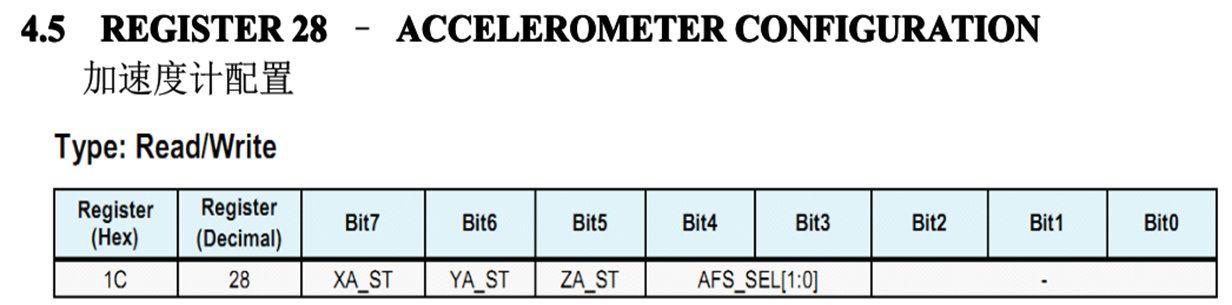
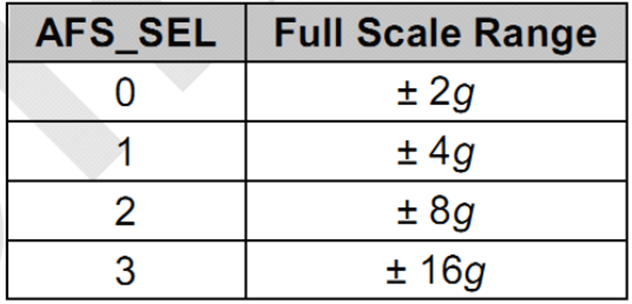
该寄存器是用来触发加速度计自检和配置加速度计的满量程范围。
//配置加速度传感器工作在 2G 模式,不自检
I2C_WriteReg(MPU6050_RA_ACCEL_CONFIG , 0x00);
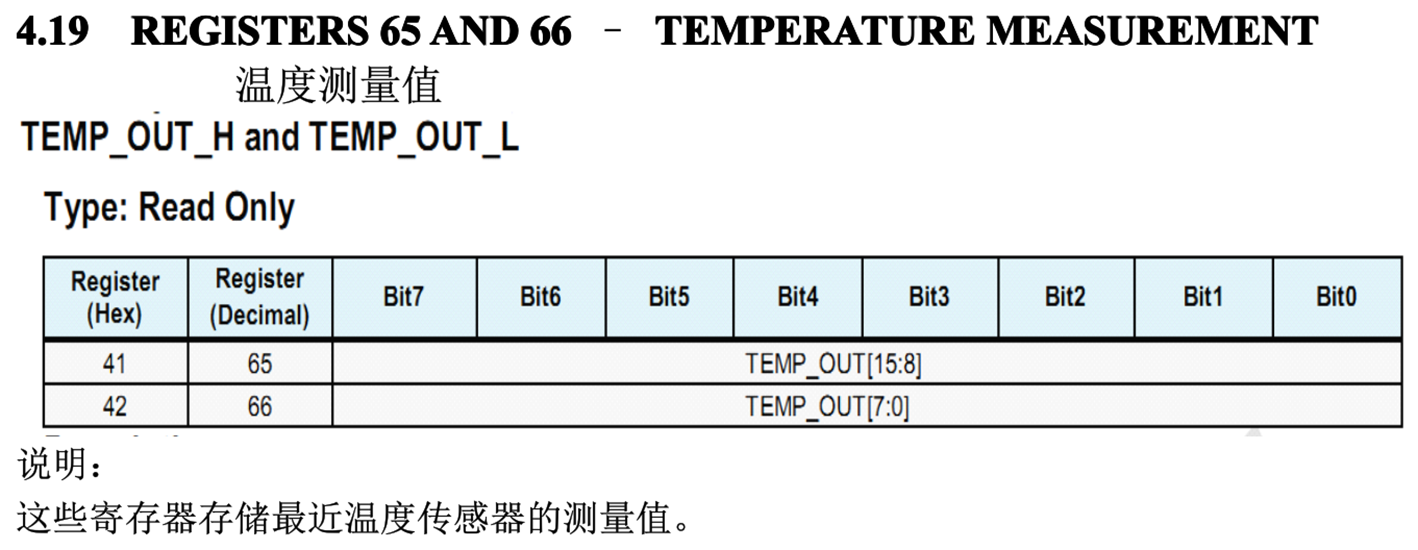
摄氏度的温度可以用寄存器的置这么计算:
Temperature n in s degrees C =
(TEMP_OUT Register e Value as a signed quantity)/340 + 36.53
三、MPU6050实例
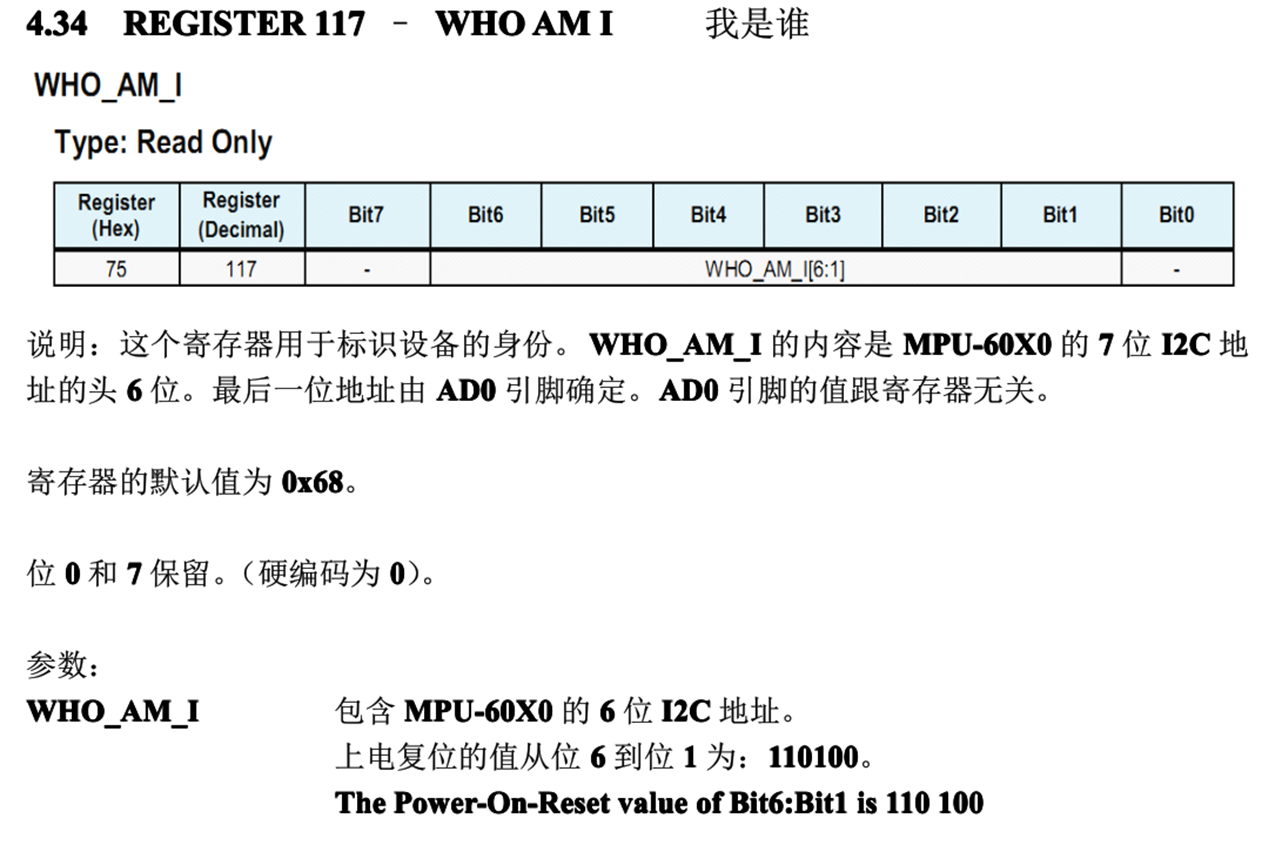
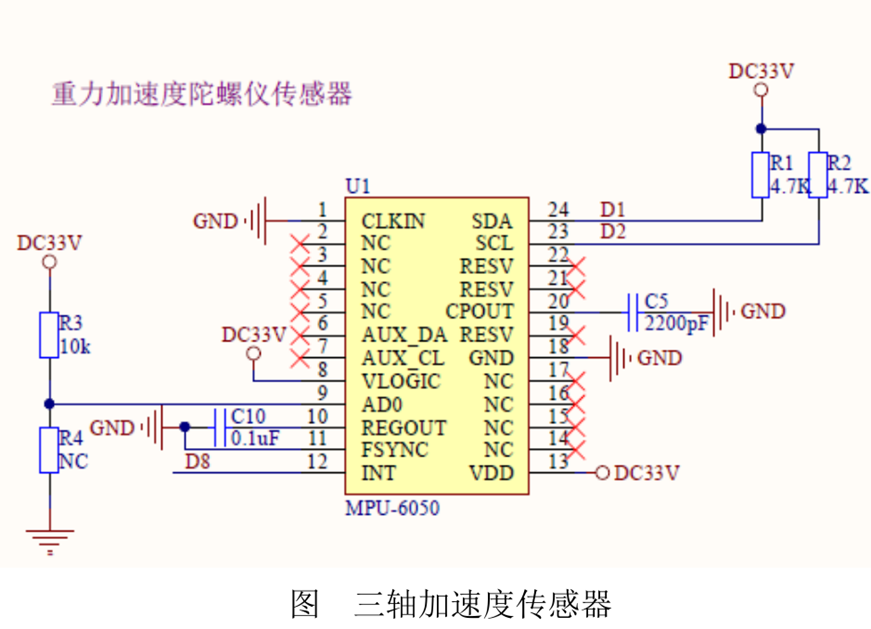
 注:R4未接,AD0直接接到电源上,因此设备地址为110 1001既0x69
注:R4未接,AD0直接接到电源上,因此设备地址为110 1001既0x69
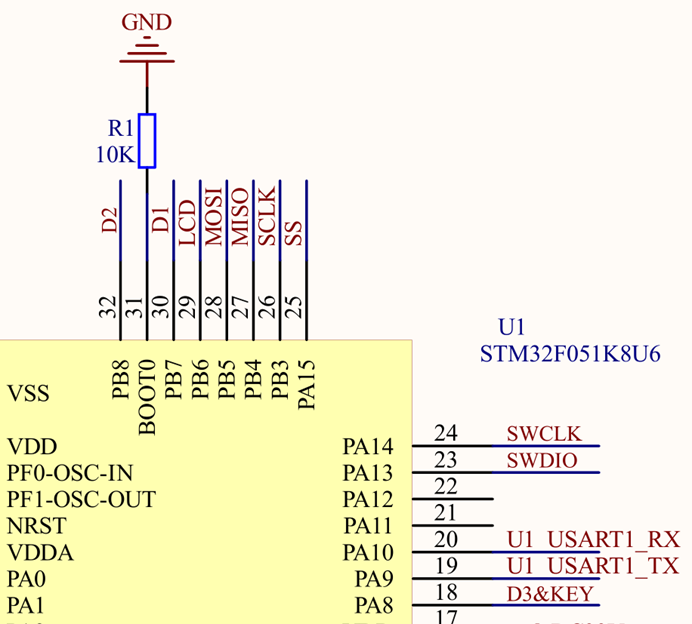
例子是用F051做的,视频我用我的板子
#include"mpu6050.h" #include "i2c.h" #include "usart.h"void mpu6050_init(void) { uint8_t temp ;temp = 0x00;HAL_I2C_Mem_Write(&hi2c1, ADDRESS_Write, PWR_MGMT_1, I2C_MEMADD_SIZE_8BIT, &temp, 1, 0x10);temp = 0x07;HAL_I2C_Mem_Write(&hi2c1, ADDRESS_Write, SMPLRT_DIV, I2C_MEMADD_SIZE_8BIT, &temp, 1, 0x10);temp = 0x06;HAL_I2C_Mem_Write(&hi2c1, ADDRESS_Write, CONFIG, I2C_MEMADD_SIZE_8BIT, &temp, 1, 0x10);temp = 0x18;HAL_I2C_Mem_Write(&hi2c1, ADDRESS_Write, GYRO_CONFIG, I2C_MEMADD_SIZE_8BIT, &temp, 1, 0x10);temp = 0x00;HAL_I2C_Mem_Write(&hi2c1, ADDRESS_Write, ACCEL_CONFIG, I2C_MEMADD_SIZE_8BIT, &temp, 1, 0x10);}void mpu6050_getaccel(int16_t *x, int16_t *y, int16_t *z) {uint8_t value[2];HAL_I2C_Mem_Read(&hi2c1, ADDRESS_Read, ACCEL_XOUT_L,I2C_MEMADD_SIZE_8BIT, &value[0], 1,0x10);HAL_I2C_Mem_Read(&hi2c1, ADDRESS_Read, ACCEL_XOUT_H,I2C_MEMADD_SIZE_8BIT, &value[1], 1,0x10);*x = (value[1] << 8) + value[0];HAL_I2C_Mem_Read(&hi2c1, ADDRESS_Read, ACCEL_YOUT_L,I2C_MEMADD_SIZE_8BIT, &value[0], 1,0x10);HAL_I2C_Mem_Read(&hi2c1, ADDRESS_Read, ACCEL_YOUT_H,I2C_MEMADD_SIZE_8BIT, &value[1], 1,0x10);*y = (value[1] << 8) + value[0];HAL_I2C_Mem_Read(&hi2c1, ADDRESS_Read, ACCEL_ZOUT_L,I2C_MEMADD_SIZE_8BIT, &value[0], 1,0x10);HAL_I2C_Mem_Read(&hi2c1, ADDRESS_Read, ACCEL_ZOUT_H,I2C_MEMADD_SIZE_8BIT, &value[1], 1,0x10);*z = (value[1] << 8) + value[0];printf("acce value: %d %d %d\n",*x,*y,*z);}#ifndef __MPU6050_H #define __MPU6050_H/* Includes ------------------------------------------------------------------*///**************************************** // MPU6050 IIC测试程序 // 使用单片机STC89C52 // 晶振:11.0592M // 显示:LCD1602 // 编译环境 IAR // 功能: 显示加速度计和陀螺仪的10位原始数据 //**************************************** #include <math.h> //IAR library #include <stdio.h> //IAR library #include <stdint.h> //typedef unsigned char uchar; typedef unsigned short ushort; //typedef unsigned int uint;typedef short int16_t;//**************************************** // 定义MPU6050内部地址 //**************************************** #define ADDRESS_Write SlaveAddress | 0x00 // #define ADDRESS_Read SlaveAddress | 0x01 //#define PWR_MGMT_1 0x6B //电源管理,典型值:0x00(正常启用) #define SMPLRT_DIV 0x19 //陀螺仪采样率,典型值:0x07(125Hz) #define CONFIG 0x1A //低通滤波频率,典型值:0x06(5Hz) #define GYRO_CONFIG 0x1B //陀螺仪自检及测量范围,典型值:0x18(不自检,2000deg/s) #define ACCEL_CONFIG 0x1C //加速计自检、测量范围及高通滤波频率,典型值:0x00(不自检,2G,5Hz)#define ACCEL_XOUT_H 0x3B #define ACCEL_XOUT_L 0x3C #define ACCEL_YOUT_H 0x3D #define ACCEL_YOUT_L 0x3E #define ACCEL_ZOUT_H 0x3F #define ACCEL_ZOUT_L 0x40#define TEMP_OUT_H 0x41 #define TEMP_OUT_L 0x42#define GYRO_XOUT_H 0x43 #define GYRO_XOUT_L 0x44 #define GYRO_YOUT_H 0x45 #define GYRO_YOUT_L 0x46 #define GYRO_ZOUT_H 0x47 #define GYRO_ZOUT_L 0x48#define WHO_AM_I 0x75 //IIC地址寄存器(默认数值0x68,只读) //#define SlaveAddress //IIC写入时的地址字节数据,+1为读取 #define MPU6050_ADDRESS_AD0_LOW 0x68 // address pin low (GND), default for InvenSense evaluation board #define MPU6050_ADDRESS_AD0_HIGH 0x69 // address pin high (VCC) #define SlaveAddress (MPU6050_ADDRESS_AD0_HIGH<<1)void mpu6050_init(void); void mpu6050_getaccel(int16_t *x, int16_t *y, int16_t *z);#endif
int fputc(int ch, FILE *f)
{while(!(USART1->ISR & (1<<7)));USART1->TDR = ch;return ch;
}
/* USER CODE END 0 */int main(void)
{/* USER CODE BEGIN 1 */int16_t x, y, z;/* USER CODE END 1 *//* MCU Configuration----------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_I2C1_Init();MX_USART1_UART_Init();/* USER CODE BEGIN 2 */mpu6050_init();printf("this is mpu6050 test\n");/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){mpu6050_getaccel(&x, &y, &z);HAL_Delay(1000);/* USER CODE END WHILE *//* USER CODE BEGIN 3 */}/* USER CODE END 3 */}四、EEPROM
EEPROM_百度百科
EEPROM一般通过IIC使用所以拿这个举个例子
这是板子的测试demo
/********************************************************************************* 文件名程: bsp_EEPROM.c * 作 者: 硬石嵌入式开发团队* 版 本: V1.0* 编写日期: 2015-10-04* 功 能: 板载EEPROM(AT24C02)底层驱动程序******************************************************************************* 说明:* 本例程配套硬石stm32开发板YS-F1Pro使用。* * 淘宝:* 论坛:http://www.ing10bbs.com* 版权归硬石嵌入式开发团队所有,请勿商用。*******************************************************************************/ /* 包含头文件 ----------------------------------------------------------------*/ #include "i2c/bsp_EEPROM.h"/* 私有类型定义 --------------------------------------------------------------*/ /* 私有宏定义 ----------------------------------------------------------------*/ #define EVAL_I2Cx_TIMEOUT_MAX 3000/* 私有变量 ------------------------------------------------------------------*/ I2C_HandleTypeDef hi2c_eeprom; uint32_t I2cxTimeout = EVAL_I2Cx_TIMEOUT_MAX;/* 扩展变量 ------------------------------------------------------------------*/ /* 私有函数原形 --------------------------------------------------------------*/ /* 函数体 --------------------------------------------------------------------*/ /*** 函数功能: I2C外设初始化* 输入参数: 无* 返 回 值: 无* 说 明:无*/ void MX_I2C_EEPROM_Init(void) {hi2c_eeprom.Instance = EEPROM_I2Cx;hi2c_eeprom.Init.ClockSpeed = I2C_SPEEDCLOCK;hi2c_eeprom.Init.DutyCycle = I2C_DUTYCYCLE;hi2c_eeprom.Init.OwnAddress1 = 0;hi2c_eeprom.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;hi2c_eeprom.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE;hi2c_eeprom.Init.OwnAddress2 = 0;hi2c_eeprom.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;hi2c_eeprom.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE;HAL_I2C_Init(&hi2c_eeprom); }/*** 函数功能: I2C外设硬件初始化配置* 输入参数: hi2c:I2C句柄类型指针* 返 回 值: 无* 说 明: 该函数被HAL库内部调用*/ void HAL_I2C_MspInit(I2C_HandleTypeDef* hi2c) {GPIO_InitTypeDef GPIO_InitStruct;if(hi2c->Instance==EEPROM_I2Cx){ /* 使能外设时钟 */EEPROM_I2C_RCC_CLK_ENABLE(); EEPROM_I2C_GPIO_CLK_ENABLE();/**I2C1 GPIO Configuration PB6 ------> I2C1_SCLPB7 ------> I2C1_SDA */GPIO_InitStruct.Pin = EEPROM_I2C_SCL_PIN|EEPROM_I2C_SDA_PIN;GPIO_InitStruct.Mode = GPIO_MODE_AF_OD;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;HAL_GPIO_Init(EEPROM_I2C_GPIO_PORT, &GPIO_InitStruct);} }/*** 函数功能: I2C外设硬件反初始化配置* 输入参数: hi2c:I2C句柄类型指针* 返 回 值: 无* 说 明: 该函数被HAL库内部调用*/ void HAL_I2C_MspDeInit(I2C_HandleTypeDef* hi2c) {if(hi2c->Instance==EEPROM_I2Cx){/* 禁用外设时钟 */EEPROM_I2C_GPIO_CLK_DISABLE();/**I2C1 GPIO Configuration PB6 ------> I2C1_SCLPB7 ------> I2C1_SDA */HAL_GPIO_DeInit(EEPROM_I2C_GPIO_PORT, EEPROM_I2C_SCL_PIN|EEPROM_I2C_SDA_PIN);} }/*** 函数功能: I2C通信错误处理函数* 输入参数: 无* 返 回 值: 无* 说 明: 一般在I2C通信超时时调用该函数*/ static void I2C_EEPROM_Error (void) {/* 反初始化I2C通信总线 */HAL_I2C_DeInit(&hi2c_eeprom);/* 重新初始化I2C通信总线*/MX_I2C_EEPROM_Init();printf("EEPROM I2C通信超时!!! 重新启动I2C...\n"); }/*** 函数功能: 通过I2C写入一个值到指定寄存器内* 输入参数: Addr:I2C设备地址* Reg:目标寄存器* Value:值* 返 回 值: 无* 说 明: 无*/ void I2C_EEPROM_WriteData(uint16_t Addr, uint8_t Reg, uint8_t Value) {HAL_StatusTypeDef status = HAL_OK;status = HAL_I2C_Mem_Write(&hi2c_eeprom, Addr, (uint16_t)Reg, I2C_MEMADD_SIZE_8BIT, &Value, 1, I2cxTimeout);/* 检测I2C通信状态 */if(status != HAL_OK){/* 调用I2C通信错误处理函数 */I2C_EEPROM_Error();} }/*** 函数功能: 通过I2C写入一段数据到指定寄存器内* 输入参数: Addr:I2C设备地址* Reg:目标寄存器* RegSize:寄存器尺寸(8位或者16位)* pBuffer:缓冲区指针* Length:缓冲区长度* 返 回 值: HAL_StatusTypeDef:操作结果* 说 明: 在循环调用是需加一定延时时间*/ HAL_StatusTypeDef I2C_EEPROM_WriteBuffer(uint16_t Addr, uint8_t Reg, uint16_t RegSize, uint8_t *pBuffer, uint16_t Length) {HAL_StatusTypeDef status = HAL_OK;status = HAL_I2C_Mem_Write(&hi2c_eeprom, Addr, (uint16_t)Reg, RegSize, pBuffer, Length, I2cxTimeout); /* 检测I2C通信状态 */if(status != HAL_OK){/* 调用I2C通信错误处理函数 */I2C_EEPROM_Error();} return status; }/*** 函数功能: 通过I2C读取一个指定寄存器内容* 输入参数: Addr:I2C设备地址* Reg:目标寄存器* 返 回 值: uint8_t:寄存器内容* 说 明: 无*/ uint8_t I2C_EEPROM_ReadData(uint16_t Addr, uint8_t Reg) {HAL_StatusTypeDef status = HAL_OK;uint8_t value = 0;status = HAL_I2C_Mem_Read(&hi2c_eeprom, Addr, Reg, I2C_MEMADD_SIZE_8BIT, &value, 1, I2cxTimeout);/* 检测I2C通信状态 */if(status != HAL_OK){/* 调用I2C通信错误处理函数 */I2C_EEPROM_Error();}return value; }/*** 函数功能: 通过I2C读取一段寄存器内容存放到指定的缓冲区内* 输入参数: Addr:I2C设备地址* Reg:目标寄存器* RegSize:寄存器尺寸(8位或者16位)* pBuffer:缓冲区指针* Length:缓冲区长度* 返 回 值: HAL_StatusTypeDef:操作结果* 说 明: 无*/ HAL_StatusTypeDef I2C_EEPROM_ReadBuffer(uint16_t Addr, uint8_t Reg, uint16_t RegSize, uint8_t *pBuffer, uint16_t Length) {HAL_StatusTypeDef status = HAL_OK;status = HAL_I2C_Mem_Read(&hi2c_eeprom, Addr, (uint16_t)Reg, RegSize, pBuffer, Length, I2cxTimeout);/* 检测I2C通信状态 */if(status != HAL_OK){/* 调用I2C通信错误处理函数 */I2C_EEPROM_Error();} return status; }/*** 函数功能: 检测I2C设备是否处于准备好可以通信状态* 输入参数: DevAddress:I2C设备地址* Trials:尝试测试次数* 返 回 值: HAL_StatusTypeDef:操作结果* 说 明: 无*/ HAL_StatusTypeDef I2C_EEPROM_IsDeviceReady(uint16_t DevAddress, uint32_t Trials) { return (HAL_I2C_IsDeviceReady(&hi2c_eeprom, DevAddress, Trials, I2cxTimeout)); }/******************* (C) COPYRIGHT 2015-2020 硬石嵌入式开发团队 *****END OF FILE****/#ifndef __I2C_EEPROM_H__ #define __I2C_EEPROM_H__ /* 包含头文件 ----------------------------------------------------------------*/ #include "stm32f1xx_hal.h"/* 类型定义 ------------------------------------------------------------------*/ /* 宏定义 --------------------------------------------------------------------*/ #define I2C_OWN_ADDRESS 0x0A // stm32本机I2C地址 #define I2C_SPEEDCLOCK 400000 // I2C通信速率(最大为400K) #define I2C_DUTYCYCLE I2C_DUTYCYCLE_2 // I2C占空比模式:1/2 #define EEPROM_I2Cx I2C1 #define EEPROM_I2C_RCC_CLK_ENABLE() __HAL_RCC_I2C1_CLK_ENABLE() #define EEPROM_I2C_RCC_CLK_DISABLE() __HAL_RCC_I2C1_CLK_DISABLE()#define EEPROM_I2C_GPIO_CLK_ENABLE() __HAL_RCC_GPIOB_CLK_ENABLE() #define EEPROM_I2C_GPIO_CLK_DISABLE() __HAL_RCC_GPIOB_CLK_DISABLE() #define EEPROM_I2C_GPIO_PORT GPIOB #define EEPROM_I2C_SCL_PIN GPIO_PIN_6 #define EEPROM_I2C_SDA_PIN GPIO_PIN_7/* * EEPROM 2kb = 2048bit = 2048/8 B = 256 B* 32 pages of 8 bytes each** Device Address* 1 0 1 0 A2 A1 A0 R/W* 1 0 1 0 0 0 0 0 = 0XA0* 1 0 1 0 0 0 0 1 = 0XA1 */ /* EEPROM Addresses defines */ #define EEPROM_I2C_ADDRESS 0xA0/* 扩展变量 ------------------------------------------------------------------*/ extern I2C_HandleTypeDef hi2c_eeprom;/* 函数声明 ------------------------------------------------------------------*/ void MX_I2C_EEPROM_Init(void); void I2C_EEPROM_WriteData(uint16_t Addr, uint8_t Reg, uint8_t Value); HAL_StatusTypeDef I2C_EEPROM_WriteBuffer(uint16_t Addr, uint8_t Reg, uint16_t RegSize, uint8_t *pBuffer, uint16_t Length); uint8_t I2C_EEPROM_ReadData(uint16_t Addr, uint8_t Reg); HAL_StatusTypeDef I2C_EEPROM_ReadBuffer(uint16_t Addr, uint8_t Reg, uint16_t RegSize, uint8_t *pBuffer, uint16_t Length); HAL_StatusTypeDef I2C_EEPROM_IsDeviceReady(uint16_t DevAddress, uint32_t Trials);#endif /* __I2C_EEPROM_H__ *//******************* (C) COPYRIGHT 2015-2020 硬石嵌入式开发团队 *****END OF FILE****//********************************************************************************* 文件名程: main.c * 作 者: 硬石嵌入式开发团队* 版 本: V1.0* 编写日期: 2015-10-04* 功 能: 板载EEPROM(AT24C02)读写测试******************************************************************************* 说明:* 本例程配套硬石stm32开发板YS-F1Pro使用。* * 淘宝:* 论坛:http://www.ing10bbs.com* 版权归硬石嵌入式开发团队所有,请勿商用。*******************************************************************************/ /* 包含头文件 ----------------------------------------------------------------*/ #include "stm32f1xx_hal.h" #include "usart/bsp_debug_usart.h" #include "i2c/bsp_EEPROM.h"/* 私有类型定义 --------------------------------------------------------------*/ /* 私有宏定义 ----------------------------------------------------------------*/ /* 私有变量 ------------------------------------------------------------------*/ uint8_t I2c_Buf_Write[256]={0}; uint8_t I2c_Buf_Read[256]={0};;/* 扩展变量 ------------------------------------------------------------------*/ /* 私有函数原形 --------------------------------------------------------------*/ /* 函数体 --------------------------------------------------------------------*/ /*** 函数功能: 系统时钟配置* 输入参数: 无* 返 回 值: 无* 说 明: 无*/ void SystemClock_Config(void) {RCC_OscInitTypeDef RCC_OscInitStruct;RCC_ClkInitTypeDef RCC_ClkInitStruct;RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE; // 外部晶振,8MHzRCC_OscInitStruct.HSEState = RCC_HSE_ON;RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9; // 9倍频,得到72MHz主时钟HAL_RCC_OscConfig(&RCC_OscInitStruct);RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK; // 系统时钟:72MHzRCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1; // AHB时钟:72MHzRCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2; // APB1时钟:36MHzRCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1; // APB2时钟:72MHzHAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2);// HAL_RCC_GetHCLKFreq()/1000 --> 1ms中断一次// HAL_RCC_GetHCLKFreq()/100000 --> 10us中断一次// HAL_RCC_GetHCLKFreq()/1000000 --> 1us中断一次HAL_SYSTICK_Config(HAL_RCC_GetHCLKFreq()/1000); // 配置并启动系统滴答定时器/* 系统滴答定时器时钟源 */HAL_SYSTICK_CLKSourceConfig(SYSTICK_CLKSOURCE_HCLK);/* 系统滴答定时器中断优先级配置 */HAL_NVIC_SetPriority(SysTick_IRQn, 0, 0); }/*** 函数功能: 主函数.* 输入参数: 无* 返 回 值: 无* 说 明: 无*/ int main(void) { uint16_t i;/* 复位所有外设,初始化Flash接口和系统滴答定时器 */HAL_Init();/* 配置系统时钟 */SystemClock_Config();/* 初始化串口并配置串口中断优先级 */MX_DEBUG_USART_Init();/* 调用格式化输出函数打印输出数据 */printf("******** EEPROM(AT24C02)数据读写(硬件I2C模式)测试 ********\n");MX_I2C_EEPROM_Init();printf("待写入的数据:\n"); for ( i=0; i<256; i++ ) //填充缓冲{I2c_Buf_Read[i]=0; // 清空接收缓冲区I2c_Buf_Write[i] = i; // 为发送缓冲区填充数据printf("0x%02X ", I2c_Buf_Write[i]);if(i%16 == 15) printf("\n");}for(i=0;i<256;i+=8){I2C_EEPROM_WriteBuffer(EEPROM_I2C_ADDRESS,i,I2C_MEMADD_SIZE_8BIT,&I2c_Buf_Write[i],8);HAL_Delay(5);// 短延时不能少}printf("读出的数据:\n");I2C_EEPROM_ReadBuffer(EEPROM_I2C_ADDRESS,0,I2C_MEMADD_SIZE_8BIT,&I2c_Buf_Read[0],256);for (i=0;i<256;i++){ if(I2c_Buf_Read[i] != I2c_Buf_Write[i]){printf("0x%02X ", I2c_Buf_Read[i]);printf("错误:I2C EEPROM写入与读出的数据不一致\n\r");break;}printf("0x%02X ", I2c_Buf_Read[i]);if(i%16 == 15) printf("\n");}if(i==256){printf("EEPROM(AT24C02)读写测试成功\n\r");}/* 无限循环 */while (1){} }/******************* (C) COPYRIGHT 2015-2020 硬石嵌入式开发团队 *****END OF FILE****/
串口都要写烂了,就不发了
相关文章:
STM32——IIC总线(MPU6050应用)
目录 一、IIC介绍 二、MPU6050 三、MPU6050实例 四、EEPROM ---------------------------------------------------------------------------------------------------------------------------- 每次都是IIC好没新意啊,我决定这次录视频的时候举两个例子&…...

ADB使用经验
adb是Android Debug Bridge的缩写,是一种用于与Android设备通信的命令行工具。它可以通过USB连接或Wi-Fi连接,允许开发者在计算机和Android设备之间进行文件传输、安装应用程序、调试应用程序等操作。要使用adb,需要先将Android设备与计算机连…...
详解LinkedHashSet和LinkedHashMap
目录 一.LinkedHashSet和LinkedHashMap 1.基本介绍 2.与HashSet和HashMap的区别 3.LinkedHashSet和LinkedHashMap具体的方法 1.LinkedHashSet 2.LinkedHashMap 二.模拟代码实现LinkedHashMap 三.具体应用 一.LinkedHashSet和LinkedHashMap 1.基本介绍 顾名思义,根据名…...
C++ LinuxWebServer 2万7千字的面经长文(下)
⭐️我叫忆_恒心,一名喜欢书写博客的在读研究生👨🎓。 如果觉得本文能帮到您,麻烦点个赞👍呗! Linux Web Server项目虽然是现在C求职者的人手一个的项目,但是想要吃透这个项目,还是…...
RK3568平台开发系列讲解(驱动基础篇)IO 模型的分类
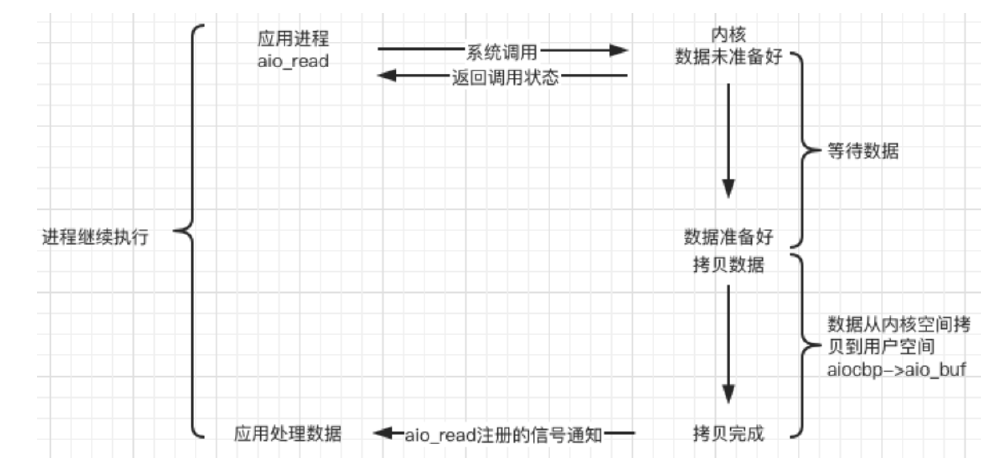
🚀返回专栏总目录 文章目录 一、阻塞 IO二、非阻塞 IO三、IO 多路复用四、信号驱动五、异步 IO沉淀、分享、成长,让自己和他人都能有所收获!😄 📢本篇将针对IO模型进行分类。 假设有这样一个场景,从磁盘中循环读取 100M 的数据并处理,磁盘读取 100M 需要花费 20 秒的…...

ChatGPT 有哪些 “激动人心的时刻“?以及自己的一些思考
文章目录一、前言二、主要内容三、一些思考🍉 CSDN 叶庭云:https://yetingyun.blog.csdn.net/ 一、前言 近日,英伟达创始人兼 CEO 黄仁勋与 OpenAI 联合创始人及首席科学家伊尔亚-苏茨克维 (Ilya Sutskever) 展开了一次 “炉边谈话”。 黄仁…...
Thingsboard开源物联网平台智慧农业实例快速部署教程(二)【手把手部署UI与动态数据】
Thingsboard开源物联网平台智慧农业实例快速部署教程(二)【部署UI与动态数据】 文章目录Thingsboard开源物联网平台智慧农业实例快速部署教程(二)【部署UI与动态数据】1. 页面总览2. 设备2.1 数据字段定义2.2 设备映射关系2.3 添加…...
Redis事务
1、事务概要 Redis事务是一个单独的隔离操作: 事务中的所有命令都会序列化、按顺序地执行。事务在执行的过程中,不会被其他客户端发送来的命令请求所打断。 Redis事务的主要作用 串联多个命令,防止别的命令插队。 事务的3个命令 MultiExe…...
【蛤蟆先生去看心理医生】
第一章 整个人都不太好 人物性格描述蛤蟆热情、时尚、爱冒险,现在抑郁,不能自拔獾智慧、威严河鼠关心朋友,有点絮叨鼹鼠体贴善良 第二章 擎友前来相助 讲诉了鼹鼠和河鼠对蛤蟆情况的担忧和讨论。鼹鼠回忆起过去蛤蟆时髦的打扮和充满活力的生…...

JAVA开发与运维(云安全产品)
在现在的开发和运维中,云生态组件的使用率非常高,很少公司自己维护自己的物理机,网络流量 ,监控,第三方中间件,除了少数涉密程度高的部分和公司外,大多数的企业都在使用云生态。比如我们正在开发…...
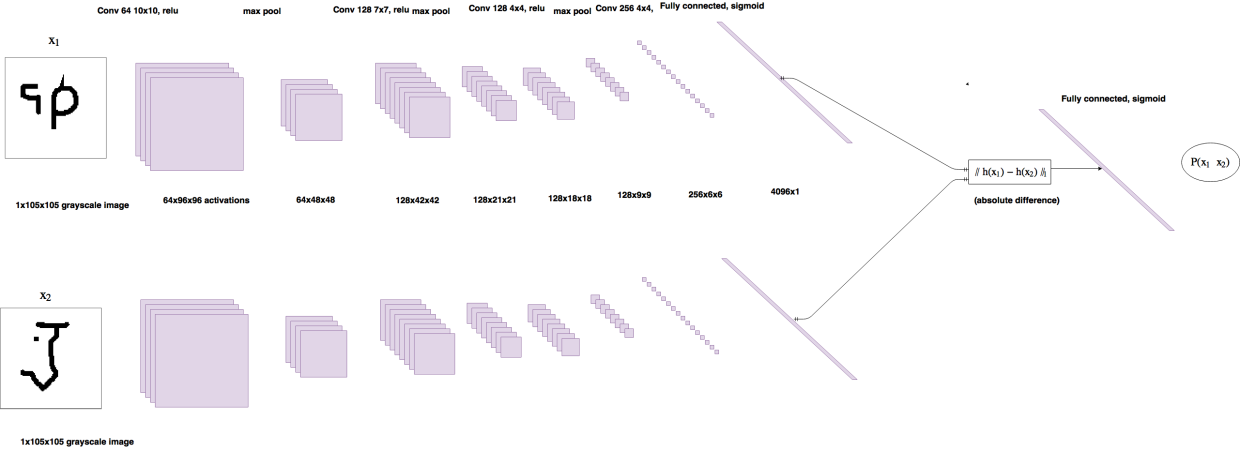
[Few-shot learning] Siamese neural networks
这篇文章主要介绍的是Siamese Neural Network经典论文: Gregory Koch, et al., Siamese Neural Networks for One-shot Image Recognition. ICML 2015。 神经网络能够取得非常好的效果得益于使用大量的带标签数据进行有监督学习训练。但是这样的训练方法面临两个难题…...

利用qiankun框架在自己项目中集成拖拽式低代码数据可视化开发平台
目前微前端已经是很成熟的技术了,各大公司都推出了自己的微前端框架,比如蚂蚁的qiankun,京东的micro-app,如果你的子应用不使用vite构建的话,我会更加推荐后者,micro-app使用更加简单,micro-app…...

【spring boot】在Java中操作缓存:
文章目录一、Jedis二、Spring Data Redis(常用)【1】pom.xml【2】application.yml【3】RedisConfig【4】RuiJiWaiMaiApplicationTests三、Spring Cache【1】常用注解:【2】使用案例【3】底层不使用redis,重启服务,内存…...
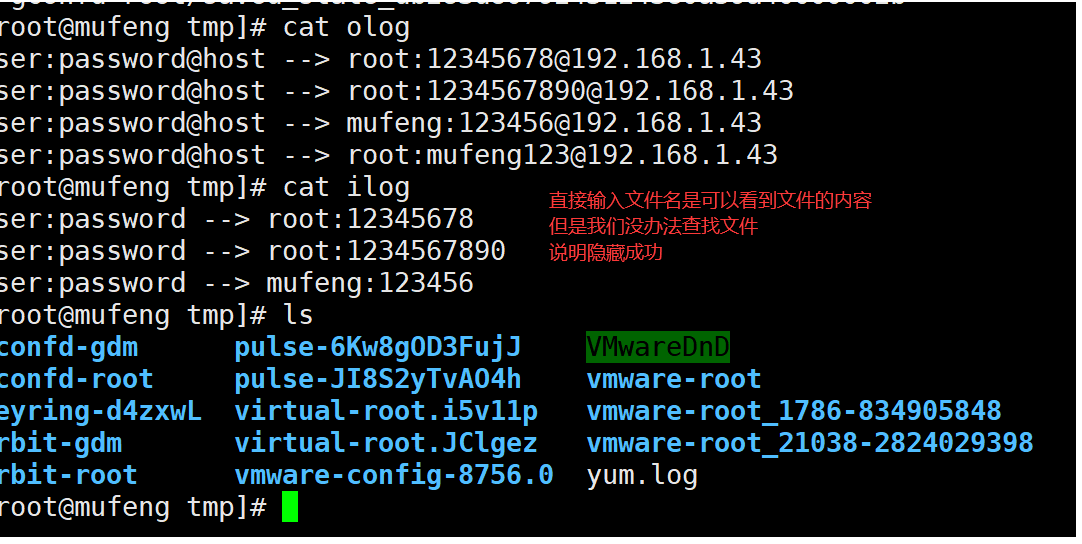
擂台赛-安全攻防之使用openssh后门获取root密码实战
前言 大家好,我是沐风晓月,我们开始组队学习了,介绍下我们的情况: 这几天跟队员 迎月,虹月,心月,古月打擂台,我和心月一组,相互攻占对方服务器。 终于在今早凌晨三点拿…...
关于React入门基础从哪学起?
文章目录前言一、React简介1. React是什么2. react 与 vue 最大的区别就是:3. React特点4. React介绍描述5. React高效的原因6.React强大之处二、React基础格式1.什么是虚拟dom?2.为什么要创建虚拟dom?三、React也分为俩种创建方式1. 使用js的方式来创建…...
python玄阶斗技--tkinter库
目录 一.tkinter库介绍 二.功能实现 1.窗口创建 2.Button 按钮 3.Entry 文本输入域 4.text 文本框 5.Listbox 多选下拉框 6.Radiobutton 多选项按钮 7.Checkbutton 多选按钮 8.Scale 滑块(拉动条) 9.Scroolbar 滚动条 10.Menu 菜单栏 11. messagebox 消息框 12…...
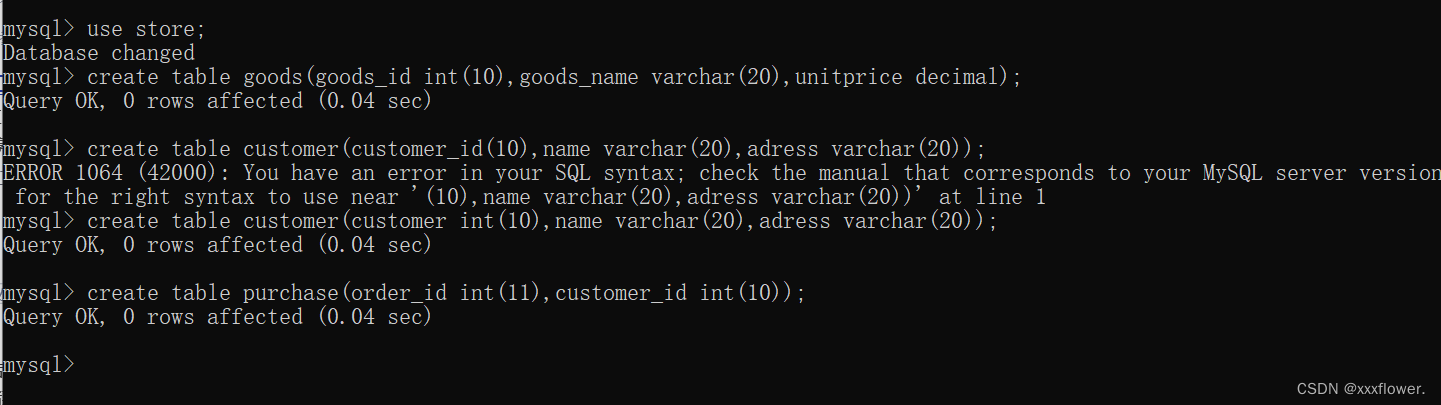
【MySQL】MySQL的介绍MySQL数据库及MySQL表的基本操作
文章目录数据库的介绍什么是数据库数据库分类MySQL的介绍数据库的基本操作数据库的操作创建数据库查看所有数据库选中指定的数据库删除数据库常用数据类型数值类型字符串类型日期类型表的操作创建表查看指定数据库下的所有表查看指定表的结构删除表小练习数据库的介绍 什么是数…...
)
【每日随笔】社会上层与中层的博弈 ( 技术无关、没事别点进来看 | 社会上层 | 上层与中层的保护层 | 推荐学习的知识 )
文章目录一、社会上层二、上层与中层的保护层三、推荐学习的知识一、社会上层 社会上层 掌握着 生产资料 和 权利 ; 社会中层 是 小企业主 和 中产打工人 ; 上层 名额有限 生产资料所有者 : 垄断巨头 , 独角兽 , 大型企业主 , 大型企业股东 , 数量有限 ;权利所有者 : 高级别的…...
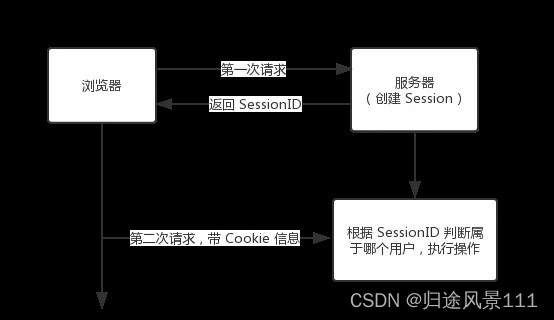
Cookie 和 Session的区别
文章目录时间:2023年3月23日第一:什么是 Cookie 和 Session ?什么是 Cookie什么是 Session第二:Cookie 和 Session 有什么不同?第三:为什么需要 Cookie 和 Session,他们有什么关联?第四&#x…...
leetcode使用vscode调试C++代码
leetcode使用vscode调试C代码 这里记录一下大体思路吧,关于细节配置放上别的博主的链接,他们讲的更好 vscode只是编辑器,相当于记事本,需要下载minGW提供的编译器和调试器 官方介绍: C/C拓展不包括编译器或调试器&…...

浅谈 React Hooks
React Hooks 是 React 16.8 引入的一组 API,用于在函数组件中使用 state 和其他 React 特性(例如生命周期方法、context 等)。Hooks 通过简洁的函数接口,解决了状态与 UI 的高度解耦,通过函数式编程范式实现更灵活 Rea…...
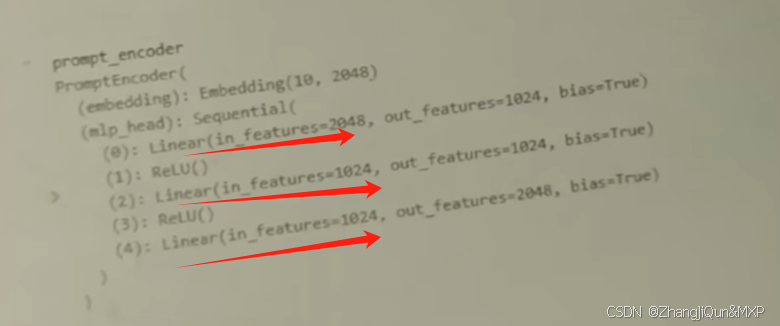
Prompt Tuning、P-Tuning、Prefix Tuning的区别
一、Prompt Tuning、P-Tuning、Prefix Tuning的区别 1. Prompt Tuning(提示调优) 核心思想:固定预训练模型参数,仅学习额外的连续提示向量(通常是嵌入层的一部分)。实现方式:在输入文本前添加可训练的连续向量(软提示),模型只更新这些提示参数。优势:参数量少(仅提…...

边缘计算医疗风险自查APP开发方案
核心目标:在便携设备(智能手表/家用检测仪)部署轻量化疾病预测模型,实现低延迟、隐私安全的实时健康风险评估。 一、技术架构设计 #mermaid-svg-iuNaeeLK2YoFKfao {font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:16px;fill:#333;}#mermaid-svg…...

Go 语言接口详解
Go 语言接口详解 核心概念 接口定义 在 Go 语言中,接口是一种抽象类型,它定义了一组方法的集合: // 定义接口 type Shape interface {Area() float64Perimeter() float64 } 接口实现 Go 接口的实现是隐式的: // 矩形结构体…...

macOS多出来了:Google云端硬盘、YouTube、表格、幻灯片、Gmail、Google文档等应用
文章目录 问题现象问题原因解决办法 问题现象 macOS启动台(Launchpad)多出来了:Google云端硬盘、YouTube、表格、幻灯片、Gmail、Google文档等应用。 问题原因 很明显,都是Google家的办公全家桶。这些应用并不是通过独立安装的…...

【android bluetooth 框架分析 04】【bt-framework 层详解 1】【BluetoothProperties介绍】
1. BluetoothProperties介绍 libsysprop/srcs/android/sysprop/BluetoothProperties.sysprop BluetoothProperties.sysprop 是 Android AOSP 中的一种 系统属性定义文件(System Property Definition File),用于声明和管理 Bluetooth 模块相…...

网络编程(UDP编程)
思维导图 UDP基础编程(单播) 1.流程图 服务器:短信的接收方 创建套接字 (socket)-----------------------------------------》有手机指定网络信息-----------------------------------------------》有号码绑定套接字 (bind)--------------…...

sipsak:SIP瑞士军刀!全参数详细教程!Kali Linux教程!
简介 sipsak 是一个面向会话初始协议 (SIP) 应用程序开发人员和管理员的小型命令行工具。它可以用于对 SIP 应用程序和设备进行一些简单的测试。 sipsak 是一款 SIP 压力和诊断实用程序。它通过 sip-uri 向服务器发送 SIP 请求,并检查收到的响应。它以以下模式之一…...
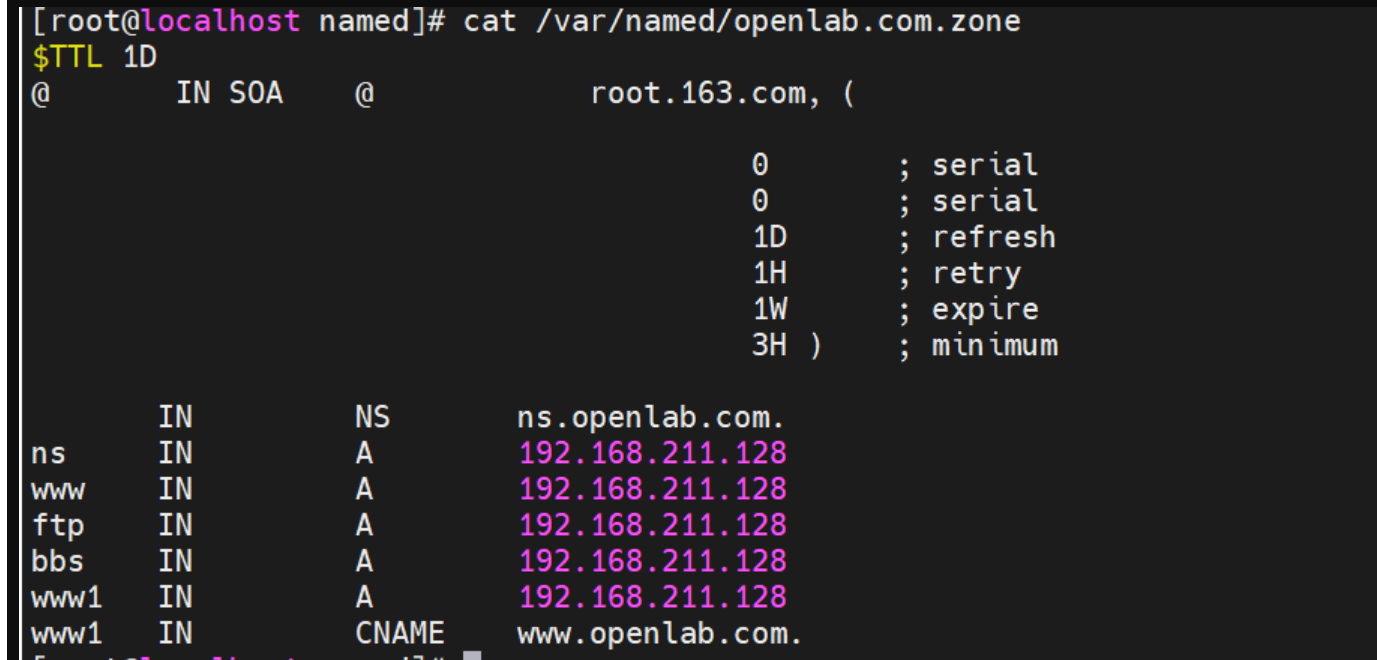
搭建DNS域名解析服务器(正向解析资源文件)
正向解析资源文件 1)准备工作 服务端及客户端都关闭安全软件 [rootlocalhost ~]# systemctl stop firewalld [rootlocalhost ~]# setenforce 0 2)服务端安装软件:bind 1.配置yum源 [rootlocalhost ~]# cat /etc/yum.repos.d/base.repo [Base…...

NPOI操作EXCEL文件 ——CAD C# 二次开发
缺点:dll.版本容易加载错误。CAD加载插件时,没有加载所有类库。插件运行过程中用到某个类库,会从CAD的安装目录找,找不到就报错了。 【方案2】让CAD在加载过程中把类库加载到内存 【方案3】是发现缺少了哪个库,就用插件程序加载进…...