快速排序
一:基本思想
思想解释:
分割数组的两种情况:
理想情况:

解释:该种情况是一种理想的情况
我们每次在最左取的基准值,在经过 排序函数 之后,都会停留在数组的中间位置,这样的话,一个元素总数为N的数组,会被分为logN层,每层的时间复杂度为O(N),总的复杂度就是O(N*logN)。
极端情况:

解释: 该种情况是一种极端的情况
我们每次在最左取的基准值,在经过 排序函数 之后,还是停留在原地,按照这种极端情况,没有递归解决左右数组这一说了,数组只会呈-1的递减,每次都只是递归解决基准值右面的数组,所以这个数组被分为N层,每层的时间复杂度为O(N),总的复杂度就是O(N^2)。
二:三数取中的意义
解释:
- 选择三个元素:通常选择数组的第一个元素、最后一个元素以及位于中间的元素。
- 计算中位数:比较这三个元素,找到它们的中位数。
- 交换基准:将中位数与数组的第一个元素(或最后一个元素)交换,使得中位数成为基准元素。
这样的话就能避免极端情况了,虽然达不到理想的情况,但是时间复杂度和理想情况的同一个量级
代码:
int GetMidi(int* a, int left, int right)
{// 计算中间元素的下标int mid = (left + right) / 2;// 比较三个元素:left, mid, right// 首先比较left和midif (a[left] < a[mid]){// 如果left < mid,再比较mid和rightif (a[mid] < a[right]){// 如果left < mid < right,则mid是中间值return mid;}else if (a[left] > a[right]) // 如果left > right,则mid是最大值{// 在这种情况下,left是中间值return left;}else{// 如果left < right,则right是中间值return right;}}else // 如果a[left] > a[mid]{// 比较mid和rightif (a[mid] > a[right]){// 如果mid > right,则mid是中间值return mid;}else if (a[left] < a[right]) // 如果left < right,则mid是最小值{// 在这种情况下,left是中间值return left;}else{// 如果left > right,则right是中间值return right;}}
}三:排序函数(单趟)的三种方法
1:Hoare法

解释:
1:因为最后的6会处于正确的位置,6的左面的值都<6。所以left向右走的时候,肯定是找>6的值,right向左走的时候,肯定是找<6的值,二者都找到了,L一定会找到<6的,R也一定会找到>6de,二者不可能存在只有L或者只有R找到的情况,因为三数取中已经让基准值避免了取到最大或者最小的这种极端情况,所以二者都会找到,然后彼此交换
2:最后直到left = right 代表二者相遇,此时退出循环
3:将基准值 6 放到正确的位置 也就是相遇的位置
4:返回基准值6的位置,这样才能分开数组,去递归基准值左右的数组
相遇的疑问:
Q1:为什么相遇坐标的值,一定能和基准值交换,也就是说为什么能保证相遇坐标的值,一定比基准值6小?
A1:右面R先走做到的
右面R先走,此时相遇可以分为两种情况:
第一种:L走到R处相遇
因为R先走,所以要满足第一种情况L走到R处相遇,一定是在某一次寻找中,R找到了比基准值小的值,然后停下,此时L找不到比key大的,最后和R相遇,此时相遇处也就是R之前找到的比基准值小的位置,所以此时一定是可以和基准值进行交换的
第二种:R走到L处相遇
在某一次寻找中,R开始找比基准值小的值,但是一直没有找到,直到走到了L处与其相遇,此时的L处一定不会是最左面,因为三数取中后,L肯定在上一轮中向右走并且找到了比基准值大的值,然后R也在上一轮中找到了比基准值小的值,L和R进行了交换(L处的值是R找到的比基准值小的值),所以此一轮中的R走到L处与其相遇,相遇位置处也就是L处的值,一定是比基准值小的,所以此时一定是可以和基准值进行交换的。
代码:
int PartSort1(int* a, int left, int right)
{// 使用三数取中法获取基准元素的正确位置int Mid = GetMidi(a, left, right);// 将基准元素交换到数组的最左边Swap(&a[left], &a[Mid]);// 设置基准元素的索引为keyiint keyi = left;// 当left小于right时,进行单趟排序while (left < right){// 从右向左扫描,找到第一个小于基准元素的值while (left < right && a[right] >= a[keyi]){right--;}// 注意,这里使用&&连接两个条件,并且顺序很重要,// 因为如果left >= right,我们就不再需要继续比较// 此时a[right] >= a[keyi]放在前面的话,会越界访问// 从左向右扫描,找到第一个大于基准元素的值while (left < right && a[left] <= a[keyi]){left++;}// 交换两个元素,将大于基准的元素放到右边,小于基准的元素放到左边Swap(&a[left], &a[right]);}// 最后,将基准元素放到正确的位置(left此时指向的位置)Swap(&a[keyi], &a[left]);// 返回基准元素的最终位置return left;
}内部while循环的条件疑问:
Q2:最外面的while条件有了left < right,为什么内部循环的while里面还有left < right?
A2:因为如果内部循环while没有left < right的话,那么一直找不到会越界,最外面的while只能判断一次,无法彻底控制,所以循环里面的while里面应该是:left<right && a【right】>=key
Q3:为什么内部循环的while条件是<=和>=而不是单纯的<和>
A3:相等的值交换没有意义,会造成死循环,因为交换之后,当前位置的值会继续判断,才会往下走,如果相同的值当需要交换,那交换之后还是会重复的交换,所以应该是>=和<=
总结:
升序排序
-
基准值放在最左面:
right指针先移动,寻找小于基准值的元素(因为我们要把小于基准值的元素放到左边)。left指针后移动,寻找大于基准值的元素(因为我们要把大于基准值的元素放到右边)。
-
基准值放在最右面:
left指针先移动,寻找大于基准值的元素(因为我们要把大于基准值的元素放到右边)。right指针后移动,寻找小于基准值的元素(因为我们要把小于基准值的元素放到左边)。
降序排序
-
基准值放在最左面:
right指针先移动,寻找大于基准值的元素(因为我们要把大于基准值的元素放到左边)。left指针后移动,寻找小于基准值的元素(因为我们要把小于基准值的元素放到右边)。
-
基准值放在最右面:
left指针先移动,寻找小于基准值的元素(因为我们要把小于基准值的元素放到右边)。right指针后移动,寻找大于基准值的元素(因为我们要把大于基准值的元素放到左边)。
2:挖坑法
解释:
1:基准值得先保存到一个临时变量key中,而且初识基准值的下标要保存到一个临时变量hole(坑位)中
2:依旧是R先走找小,找到了就把该值放进下标为hole的位置上,不用担心覆盖掉hole位置的元素,因为hole位置的元素已经被保存到了临时变量中了,然后再更新hole(hole = right)
3:L也是类似
4:最后二者相遇时,此相遇下标一定是坑位,将我们一开始的key(基准值)放进这个相遇的坑位中即可,此时基准值就来到了正确的位置
5:返回相遇位置hole,这样才能分开数组,去递归基准值左右的数组
代码:
int PartSort2(int* a, int left, int right)
{// 使用三数取中法获取基准元素的正确位置int Mid = GetMidi(a, left, right);// 将基准元素交换到数组的最左边Swap(&a[left], &a[Mid]);// 把基准值保存到临时变量key中int key = a[left];// 将基准值的下标保存到临时变量hole(坑位)中int hole = left;// 当left小于right时,进行单趟排序while (left < right){// 从右向左扫描,找到第一个小于基准元素的值while (left < right && a[right] >= key){--right;}// 将找到的元素放到"坑"中a[hole] = a[right];// 更新"坑"的位置hole = right;// 从左向右扫描,找到第一个大于基准元素的值while (left < right && a[left] <= key){++left;}// 将找到的元素放到"坑"中a[hole] = a[left];// 更新"坑"的位置hole = left;}// 最后,将基准元素放到正确的位置(hole此时指向的位置)a[hole] = key;// 返回基准元素的最终位置return hole;
}3:前后指针法
解释:
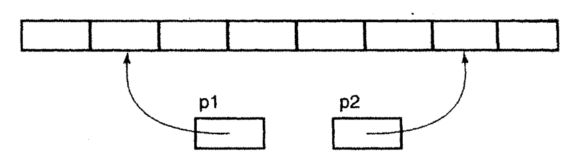
1:cur不断地找小于基准值的值,将其不断地丢到左面去
2:prev和cur的间隔有两种情况:
第一种:在cur还没有遇到比key大的值的时候,prev紧跟着cur
第二种:在cur遇到了比key大的值的时候,prefv和cur之间隔着一个或多个比key大的值
3:本质就是把一段大于key的区间,通过prev和cur交换的方法,推到右面去,同时小的也甩到 了左面去
4:如图所示:

可以看出来,一段比key(6)大的区间(7 8 9 10)都逐渐的被推到了右面,同时原先处于右面的比key(6)小的值 (3 4 5)被甩到了左面,然后再把最左面的基准值放进prev中即可,此时6来到了正确的位置。
代码:
//前后指针法实现
int PartSort3(int* a, int left, int right)
{// 1. 获取基准值int midi = GetMidi(a, left, right);// 将基准元素交换到数组的最左边Swap(&a[left], &a[midi]);// 2. 初始化指针int prev = left; // 设置前指针prev为起始位置int cur = prev + 1; // 设置后指针cur为起始位置的后一个元素// 3. 单趟排序//cur<=right,代表还有元素需要比较while (cur <= right){// 4. 比较和交换if (a[cur] < a[keyi] && ++prev != cur) //如果后指针cur所指向的元素小于基准值,//并且prev+1不等于cur才会进行交换//那么就将prev的后一个(prev+1)和cur进行交换{//交换Swap(&a[prev], &a[cur]); }// 5. 移动指针++cur; // 继续移动后指针cur}// 6. 交换基准值Swap(&a[prev], &a[keyi]);// 7. 返回基准值位置return prev;
}代码解释:
对于这一步 :if (a[cur] < a[keyi] && ++prev != cur) 进入交换的判断条件的解释:
1:左面是a[cur] < a[keyi] ,代表cur找到了比key小的值满足&&的左面
2:右面是 ++prev != cur ,这是一个前置++,代表prev+1 不等于 cur,也就是说,prev的下一个不是cur满足&&的右面,需要注意的是,这不仅是判断的时候的++,在进行交换的时候,prev也已经++了
3:为什么满足以上两点才能进入交换?
因为即使cur找到了比key小的值,但是此时prev就在他的前面,交换也没有意义,Swap(&a[prev], &a[cur]); 这一步只会让cur自己交换,所以我们得让二者之间有一定的间隔,此时prev在经过了循环的判断条件中的前置++之后,指向一段比key大的区间的第一个值,然后再与cur交换才有意义。
如图所示:


四:递归实现快速排序
1:普通递归
Hoare的递归快排:
//递归快排(霍尔)
void QuickSort1(int* a, int left, int right)
{if (left >= right)return;int keyi = PartSort1(a, left, right);QuickSort1(a, left, keyi - 1);QuickSort1(a, keyi + 1, right);}挖坑法的递归快排:
//递归快排(挖坑)
void QuickSort2(int* a, int left, int right)
{if (left >= right)return;int keyi = PartSort2(a, left, right);QuickSort2(a, left, keyi - 1);QuickSort2(a, keyi + 1, right);}前后指针的递归快排:
//递归快排(前后指针)
void QuickSort3(int* a, int left, int right)
{if (left >= right)return;int keyi = PartSort3(a, left, right);QuickSort3(a, left, keyi - 1);QuickSort3(a, keyi + 1, right);}总结:
递归的去执行单趟,最后得到有序的数组,排序函数把key位置确定了,返回了key的下标keyi,所以左数组是left~keyi-1,右数组是keyi+1~right。
2:优化递归
意义:
我们知道:一个二叉树的最后三层,占据了总结点的%87.5

所以优化递归的思路:当接收到的数组<= 10个的时候,我们不再递归,(10个开始递归到结束就是最后的3层)而是采取插入排序来进行排序,插入不懂请看:插入排序-CSDN博客

代码:
void BetterQuickSort(int* a, int left, int right)
{// 如果left大于或等于right,则数组为空或只有一个元素,无需排序,直接返回if (left >= right)return;// 如果数组长度大于10,则使用PartSort1进行快速排序if ((right - left + 1) > 10){// 调用PartSort1函数获取基准值的位置int keyi = PartSort1(a, left, right);// 对基准值左边的部分进行快速排序QuickSort1(a, left, keyi - 1);// 对基准值右边的部分进行快速排序QuickSort1(a, keyi + 1, right);}// 如果数组长度小于或等于10,则使用插入排序else{// 对left到right之间的部分进行插入排序InsertSort(a + left, right - left + 1);}
}五:非递归实现快速排序
以上的所有快速排序都是递归快排,也可以借助栈来实现非递归的快排
void QuickSortNoneR(int* a, int left, int right)
{// 1. 初始化栈ST st;STInit(&st);// 2. 入栈:将right和left的值分别入栈STPush(&st, right);STPush(&st, left);// 3. 栈不为空时继续处理while (!STEmpty(&st)){// 4. 出栈:从栈顶取出begin和end的值int begin = STTop(&st);STPop(&st);int end = STTop(&st);STPop(&st);// 5. 调用PartSort1函数获取基准值的位置int keyi = PartSort1(a, begin, end);// 6. 入栈:根据keyi的位置,将右半部分和左半部分的起始位置入栈if (keyi + 1 < end){STPush(&st, end);STPush(&st, keyi + 1);}if (keyi - 1 > begin){STPush(&st, keyi - 1);STPush(&st, begin);}}// 7. 销毁栈STDestroy(&st);
}解释:
1 :栈是后进先出,所以我们入栈和出栈的时候,都要格外的注意
2:我们先入right,再入left,这样就能先取到left,再取到right,然后进行单趟的排序函数
3:然后通过单趟的排序函数返回的key1(基准值来到正确位置后的下标),来进行左右数组的划分
3:因为我们递归是先取排序左数组,再去排序右数组,所以我们先入栈右数组的,再入栈左数组,这样下一次出栈的时候,就是先得到左数组的,再得到右数组
4:销毁栈
总结:就是用栈的性质,不断去出栈入栈,结合单趟的排序函数来实现快排。
六:运行测试
1:十万数据数组

2:百万数据数组
 3:千万数据数组
3:千万数据数组

时间的单位是ms
七:代码分享
1:Stack.c
#define _CRT_SECURE_NO_WARNINGS 1
#include "Stack.h"void STInit(ST* ps)
{assert(ps);ps->a = NULL;ps->capacity = 0;ps->top = 0;
}void STDestroy(ST* ps)
{assert(ps);free(ps->a);ps->a = NULL;ps->top = ps->capacity = 0;
}void STPush(ST* ps, STDataType x)
{assert(ps);if (ps->top == ps->capacity){int newCapacity = ps->capacity == 0 ? 4 : ps->capacity * 2;STDataType* tmp = (STDataType*)realloc(ps->a, sizeof(STDataType) * newCapacity);if (tmp == NULL){perror("realloc fail");exit(-1);}ps->a = tmp;ps->capacity = newCapacity;}ps->a[ps->top] = x;ps->top++;
}void STPop(ST* ps)
{assert(ps);// assert(ps->top > 0);--ps->top;
}STDataType STTop(ST* ps)
{assert(ps);// assert(ps->top > 0);return ps->a[ps->top - 1];
}int STSize(ST* ps)
{assert(ps);return ps->top;
}bool STEmpty(ST* ps)
{assert(ps);return ps->top == 0;
}2:Stack.h
#pragma once#include<stdio.h>
#include<stdlib.h>
#include<assert.h>
#include<stdbool.h>//#define N 10
//struct Stack
//{
// int a[N];
// int top;
//};typedef int STDataType;
typedef struct Stack
{STDataType* a;int top;int capacity;
}ST;void STInit(ST* ps);
void STDestroy(ST* ps);
void STPush(ST* ps, STDataType x);
void STPop(ST* ps);
STDataType STTop(ST* ps);int STSize(ST* ps);
bool STEmpty(ST* ps);
3:快排的所有实现
#include<stdio.h>
#include<stdlib.h>
#include<time.h>
#include "Stack.h"
//插入函数
void InsertSort(int* arr, int N)
{for (int i = 0; i < N - 1; i++){int end = i;//即将排序的元素,保留在tmpint tmp = arr[end + 1];//end>=0代表还有元素未比较while (end >= 0){if (tmp < arr[end]){arr[end + 1] = arr[end];end--;}else{break;}}//来到这里分为两种情况 //1:break->遇到比元素tmp小或和tmp相等的,将m放在它的后面//2:全部比较完了,都没有遇到<=tmp的,最后tmp放在数组第一个位置arr[end + 1] = tmp;}}
//交换
void Swap(int* x, int* y)
{int tmp = *x;*x = *y;*y = tmp;
}
void PrintArray(int* a, int n)
{for (int i = 0; i < n; i++){printf("%d ", a[i]);}printf("\n");
}
//三数取中
int GetMidi(int* a, int left, int right)
{// 计算中间元素的下标int mid = (left + right) / 2;// 比较三个元素:left, mid, right// 首先比较left和midif (a[left] < a[mid]){// 如果left < mid,再比较mid和rightif (a[mid] < a[right]){// 如果left < mid < right,则mid是中间值return mid;}else if (a[left] > a[right]) // 如果left > right,则mid是最大值{// 在这种情况下,left是中间值return left;}else{// 如果left < right,则right是中间值return right;}}else // 如果a[left] > a[mid]{// 比较mid和rightif (a[mid] > a[right]){// 如果mid > right,则mid是中间值return mid;}else if (a[left] < a[right]) // 如果left < right,则mid是最小值{// 在这种情况下,left是中间值return left;}else{// 如果left > right,则right是中间值return right;}}
}
//全部忘加[],第二个写成if//第一种单趟:霍尔法
int PartSort1(int* a, int left, int right)
{// 使用三数取中法获取基准元素的正确位置int Mid = GetMidi(a, left, right);// 将基准元素交换到数组的最左边Swap(&a[left], &a[Mid]);// 设置基准元素的索引为keyiint keyi = left;// 当left小于right时,进行单趟排序while (left < right){// 从右向左扫描,找到第一个小于基准元素的值while (left < right && a[right] >= a[keyi]){right--;}// 注意,这里使用&&连接两个条件,并且顺序很重要,// 因为如果left >= right,我们就不再需要继续比较// 此时a[right] >= a[keyi]放在前面的话,会越界访问// 从左向右扫描,找到第一个大于基准元素的值while (left < right && a[left] <= a[keyi]){left++;}// 交换两个元素,将大于基准的元素放到右边,小于基准的元素放到左边Swap(&a[left], &a[right]);}// 最后,将基准元素放到正确的位置(left此时指向的位置)Swap(&a[keyi], &a[left]);// 返回基准元素的最终位置return left;
}
//挖坑法
int PartSort2(int* a, int left, int right)
{// 使用三数取中法获取基准元素的正确位置int Mid = GetMidi(a, left, right);// 将基准元素交换到数组的最左边Swap(&a[left], &a[Mid]);// 设置基准元素的值int key = a[left];// 设置基准元素的位置int hole = left;// 当left小于right时,进行单趟排序while (left < right){// 从右向左扫描,找到第一个小于基准元素的值while (left < right && a[right] >= key){--right;}// 将找到的元素放到"坑"中a[hole] = a[right];// 更新"坑"的位置hole = right;// 从左向右扫描,找到第一个大于基准元素的值while (left < right && a[left] <= key){++left;}// 将找到的元素放到"坑"中a[hole] = a[left];// 更新"坑"的位置hole = left;}// 最后,将基准元素放到正确的位置(hole此时指向的位置)a[hole] = key;// 返回基准元素的最终位置return hole;
}
前后指针法
//int partsort3(int* a, int left, int right)
//{
// int prev = left;
// int cur = left + 1;
//
// while (cur <= right)
// {
// if (a[cur] < a[left] && ++prev != cur)
// {
// Swap(&a[cur], &a[prev]);
//
// }
// cur++;
// }
// Swap(&a[prev], &a[left]);
// //最后比left元素小的 都集中在了prev的下面及其左面,此时prev和left交换,最左面的元素一定是来到了正确的位置
// return prev;
// //a[cur] < a[left] 后 cur肯定是要++的,
// //如果此时prev+1 = cur就代表prev和cur之间还没有比下标为left的元素大的元素,所以没必要交换,
// //当++prev!=cur 的时候才交换,其次++prev!=cur 不仅判断还+1了,
//}
//第三种单趟:前后指针法
//int partsort3(int* a, int left, int right)
//{
// int Mid = GetMidi(a, left, right);
// Swap(&a[left], &a[Mid]);
//
// int prev = left;
// int cur = prev + 1;
// int keyi = left;
//
// while (cur <= right)
// {
// if (a[cur] < a[keyi] && ++prev != cur)
// {
// Swap(&a[cur], &a[prev]);
//
// }
// cur++;
// }
// Swap(&a[prev], &a[keyi]);
// return prev;
//}
//前后指针法
int PartSort3(int* a, int left, int right)
{// 1. 获取基准值int midi = GetMidi(a, left, right);// 将基准值与数组的第一个元素交换,确保基准值位于起始位置Swap(&a[left], &a[midi]);// 2. 初始化指针int prev = left; // 设置前指针prev为起始位置int cur = prev + 1; // 设置后指针cur为起始位置的后一个元素int keyi = left;// 3. 单趟排序while (cur <= right){// 4. 比较和交换if (a[cur] < a[keyi] && ++prev != cur) // 如果后指针cur所指向的元素小于基准值{Swap(&a[prev], &a[cur]); // 并且前指针prev还没有到达cur的位置,// 则将前指针向前移动一位,并与后指针指向的元素交换}// 5. 移动指针++cur; // 继续移动后指针cur}// 6. 交换基准值Swap(&a[prev], &a[keyi]);// 7. 返回基准值位置return prev;
}// 交换两个元素
void Swap(int* x, int* y)
{int temp = *x;*x = *y;*y = temp;
}
//递归快排(霍尔)
void QuickSort1(int* a, int left, int right)
{if (left >= right)return;int keyi = PartSort1(a, left, right);QuickSort1(a, left, keyi - 1);QuickSort1(a, keyi + 1, right);}
//递归快排(挖坑)
void QuickSort2(int* a, int left, int right)
{if (left >= right)return;int keyi = PartSort2(a, left, right);QuickSort2(a, left, keyi - 1);QuickSort2(a, keyi + 1, right);}
//递归快排(前后指针)
void QuickSort3(int* a, int left, int right)
{if (left >= right)return;int keyi = PartSort3(a, left, right);QuickSort3(a, left, keyi - 1);QuickSort3(a, keyi + 1, right);}
//优化递归快排
void BetterQuickSort(int* a, int left, int right)
{if (left >= right)return;if ((right - left + 1) > 10){int keyi = PartSort1(a, left, right);QuickSort1(a, left, keyi - 1);QuickSort1(a, keyi + 1, right);}else{InsertSort(a + left, right - left + 1);}//左面确认起点,右面确认个数
}
//非递归快排,借助栈
void QuickSortNoneR(int* a, int left, int right)
{// 1. 初始化栈ST st;STInit(&st);// 2. 入栈:将right和left的值分别入栈STPush(&st, right);STPush(&st, left);// 3. 栈不为空时继续处理while (!STEmpty(&st)){// 4. 出栈:从栈顶取出begin和end的值int begin = STTop(&st);STPop(&st);int end = STTop(&st);STPop(&st);// 5. 调用PartSort1函数获取基准值的位置int keyi = PartSort1(a, begin, end);// 6. 入栈:根据keyi的位置,将右半部分和左半部分的起始位置入栈if (keyi + 1 < end){STPush(&st, end);STPush(&st, keyi + 1);}if (keyi - 1 > begin){STPush(&st, keyi - 1);STPush(&st, begin);}}// 7. 销毁栈STDestroy(&st);
}
//非递归快排(借助栈)
//void QuickSortNoneR(int* a, int begin, int end)
//{
// ST st;
// STInit(&st);
// STPush(&st, end);
// STPush(&st, begin);
// while (!STEmpty(&st))
// {
// int left = STTop(&st);
// STPop(&st);
//
// int right = STTop(&st);
// STPop(&st);
//
// int keyi = PartSort1(a, left, right);
// // [lefy,keyi-1] keyi [keyi+1, right]
// if (keyi + 1 < right)
// {
// STPush(&st, right);
// STPush(&st, keyi + 1);
// }
//
// if (left < keyi - 1)
// {
// STPush(&st, keyi - 1);
// STPush(&st, left);
// }
// }
//
// STDestroy(&st);
//}
//测试少量快排
void Test1()
{int a[] = { 6,1,2,7,9,3,4,5,10,8 };QuickSortNoneR(a, 0, sizeof(a) / sizeof(int) - 1);PrintArray(a, sizeof(a) / sizeof(int));
}
//测试大量快排
void Test2()
{srand(time(0));int N = 10000000;int* a1 = (int*)malloc(sizeof(int) * N);for (int i = N - 1; i >= 0; --i){a1[i] = rand() + i;}int begin1 = clock();QuickSort1(a1, 0, N - 1);int end1 = clock();printf("QuickSort1:%d\n", end1 - begin1);free(a1);
}
//测试优化递归后的大量快排
void Test3()
{srand(time(0));int N = 10000000;int* a1 = (int*)malloc(sizeof(int) * N);for (int i = N - 1; i >= 0; --i){a1[i] = rand() + i;}int begin1 = clock();BetterQuickSort(a1, 0, N - 1);int end1 = clock();printf("BetterQuickSort:%d\n", end1 - begin1);free(a1);}
//测试非递归快排
void Test4()
{srand(time(0));int N = 10000000;int* a1 = (int*)malloc(sizeof(int) * N);for (int i = N - 1; i >= 0; --i){a1[i] = rand() + i;}int begin1 = clock();QuickSortNoneR(a1, 0, N - 1);int end1 = clock();printf("QuickSortNoneR:%d\n", end1 - begin1);free(a1);
}
int main()
{//测试递归少量快排Test1();//测试递归大量快排Test2();//测试优化递归大量快排Test3();//测试非递归大量快排Test4();return 0;
}谢谢观看~~~~
相关文章:
快速排序
一:基本思想 任取待排序元素序列中的某元素作为基准值,按照该排序码将待排序集合分割成两子序列,左子序列中所有元素均小于基准值,右 子序列中所有元素均大于基准值,然后最左右子序列重复该过程,直到所有元…...

钢琴灯有必要买很贵的吗?五款值得入手的护眼灯分享
钢琴灯有必要买很贵的吗?首先在这里先回答一下众多家长们提出问题,护眼灯钢琴灯并不是越贵越好!护眼灯钢琴灯这种比较大的电器虽然在生产中的用材用料存在一定的成本,但是并不是价格越贵的会越好,价格并不是决定产品质…...
C和指针:指针
内存和地址 程序视角看内存是一个大的字节数组,每个字节包含8个位,可以存储无符号值0至255,或有符号值-128至127。 多个字节可以合成一个字,许多机器以字为单位存储整数,每个字一般由2个或4个字节组成。 由于它们包含了更多的位&…...

paddle 分类网络
1.PaddlePaddlle强化学习及PARL框架 参考1 参考2 CPU版本安装 2.1 2.x版本安装 首先在anaconda下创建虚拟环境:可参考【1】Anaconda安装超简洁教程,瞬间学会! 飞桨安装链接【开始使用_飞桨-源于产业实践的开源深度学习平台】 2 安装 con…...

计算机网络408考研 2022
https://zhuanlan.zhihu.com/p/695446866 1 1 1SDN代表软件定义网络。它是一种网络架构,旨在通过将网络控制平面从数据转发平面分离出来,从而实现网络的灵活性和可编程性。在SDN中,网络管理员可以通过集中式控制器 来动态管理网络流量&…...

2023级JavaScript与jQuery
第三课:JavaScript对象编程 一.预习笔记 1.Date对象 对象创建:var myDatenew Date() 输出显示当前日期的标准时间 对象创建:var myDatenew Date(“2024/09/14”) 对象创建:var myDatenew Date(2024,9,14) 当前对象创建时&…...

【C++】————IO流
作者主页: 作者主页 本篇博客专栏:C 创作时间 :2024年9月9日 一、C语言的输入和输出 C语言中我们用到的最频繁的输入输出方式就是 scanf() 和 printf()。 scanf():从标准输入设备(键盘)读…...
ESP8266连接到Blinker平台
ESP8266是一款常见的物联网开发板,因其支持WIFI且性能强大,收到了各类电子爱好者的喜爱,Blinker是一个非常适合初学者的物联网开发平台,借助Arduino开发环境,二者之间进行巧妙配合,很容易便可以完成物联网的…...
qwen2 VL 多模态图文模型;图像、视频使用案例
参考: https://huggingface.co/Qwen/Qwen2-VL-2B-Instruct 模型: export HF_ENDPOINThttps://hf-mirror.comhuggingface-cli download --resume-download --local-dir-use-symlinks False Qwen/Qwen2-VL-2B-Instruct --local-dir qwen2-vl安装&#x…...

ASPICE评估:汽车软件质量的守护神
随着汽车行业的快速发展,车载软件系统的复杂性和重要性日益凸显。为了确保汽车软件的质量和安全性, 汽车行业引入了ASPICE(Automotive SPICE)评估作为评价软件开发团队研发能力的重要工具。 本文将详细介绍ASPICE评估的概念、过…...

野生动物检测系统源码分享
野生动物检测检测系统源码分享 [一条龙教学YOLOV8标注好的数据集一键训练_70全套改进创新点发刊_Web前端展示] 1.研究背景与意义 项目参考AAAI Association for the Advancement of Artificial Intelligence 项目来源AACV Association for the Advancement of Computer Vis…...
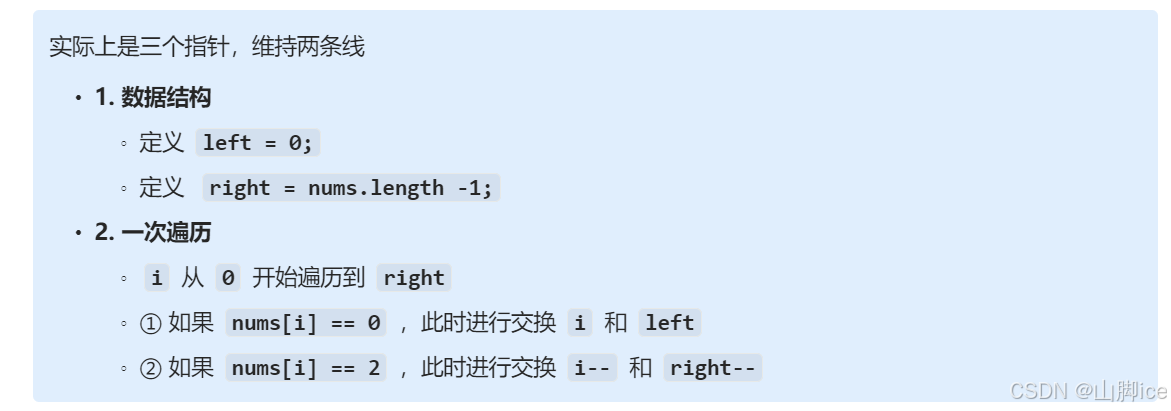
【Hot100】LeetCode—75. 颜色分类
目录 1- 思路题目识别技巧 2- 实现⭐75. 颜色分类——题解思路 3- ACM 实现 原题链接:75. 颜色分类 1- 思路 题目识别 识别1 :给定三种类型数据,使得三种数据用一次遍历实现三种数据排序。 技巧 用两条线将数组分为三部分A 线左侧&#x…...
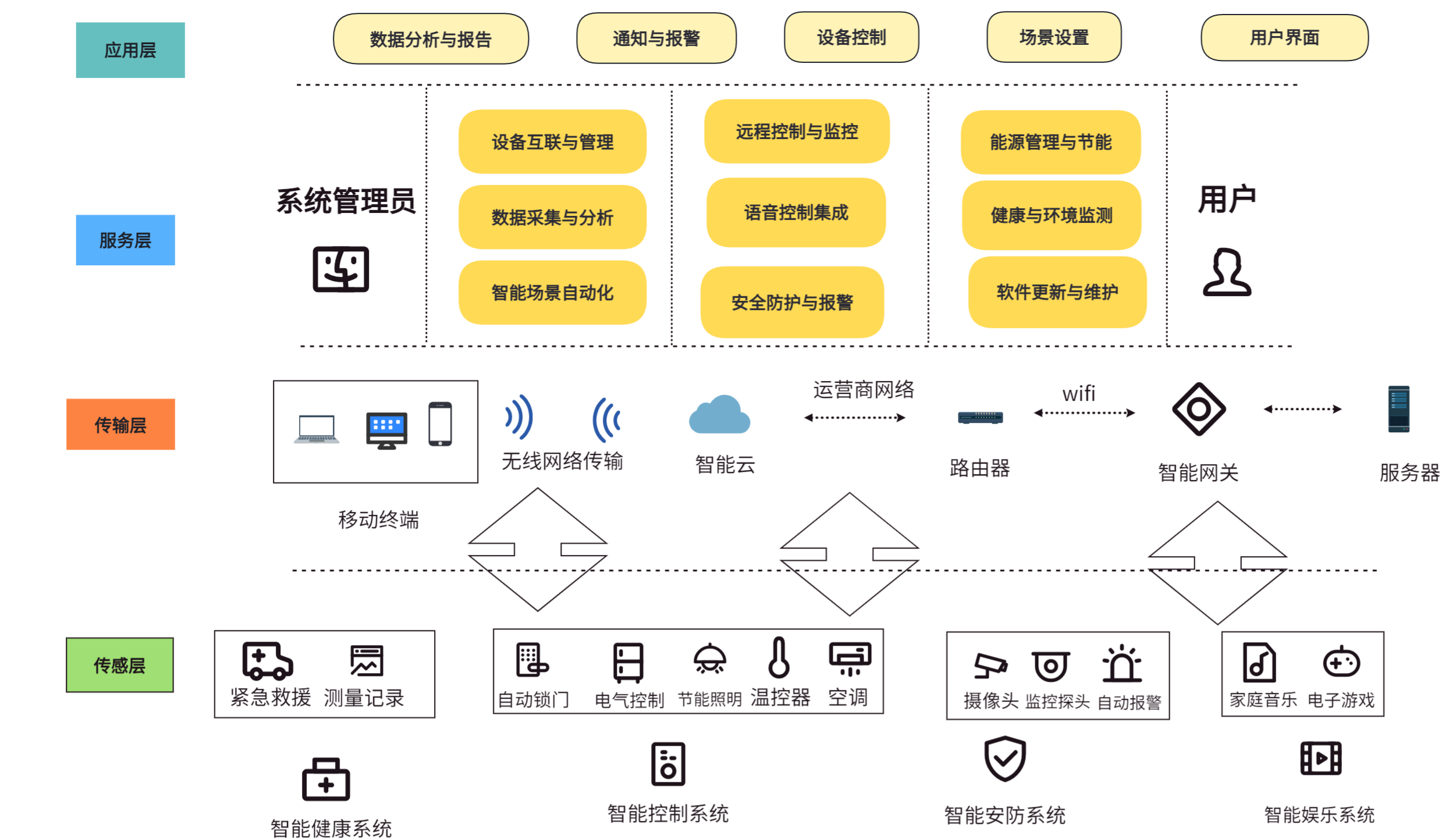
【物联网技术大作业】设计一个智能家居的应用场景
前言: 本人的物联网技术的期末大作业,希望对你有帮助。 目录 大作业设计题 (1)智能家居的概述。 (2)介绍智能家居应用。要求至少5个方面的应用,包括每个应用所采用的设备,性能&am…...
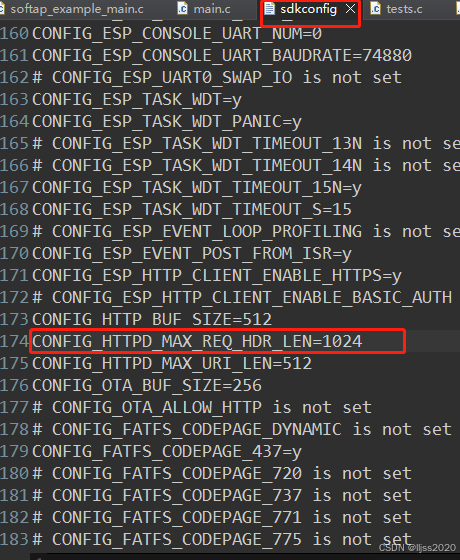
ESP8266做httpServer提示Header fields are too long for server to interpret
CONFIG_HTTP_BUF_SIZE512 CONFIG_HTTPD_MAX_REQ_HDR_LEN1024 CONFIG_HTTPD_MAX_URI_LEN512CONFIG_HTTPD_MAX_REQ_HDR_LEN由512改为1024...
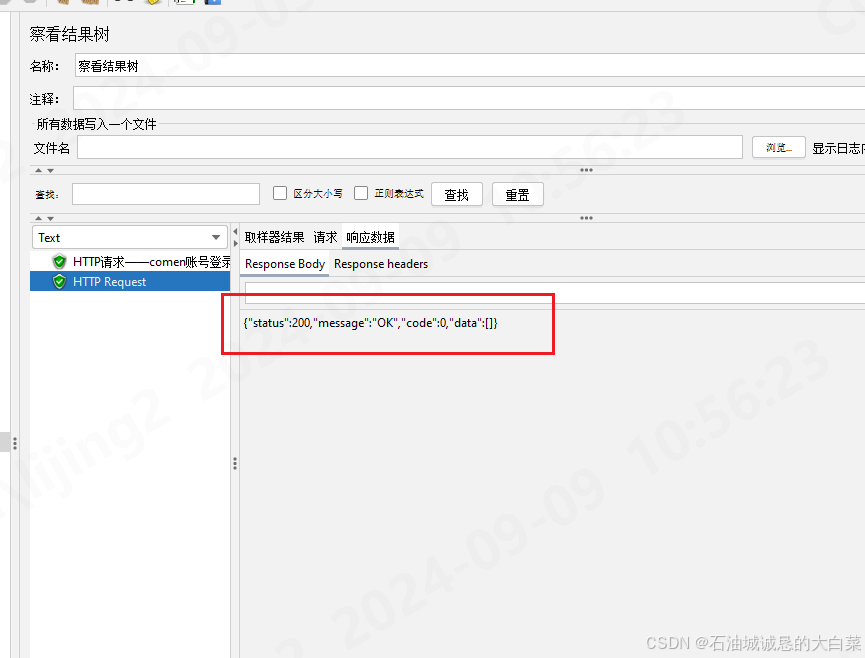
jmeter设置全局token
1、创建setup线程,获取token的接口在所有线程中优先执行,确保后续线程可以拿到token 2、添加配置原件-Http信息头管理器,添加取样器-http请求 配置好接口路径,端口,前端传参数据,调试一下,保证获…...
DORIS - DORIS之索引简介
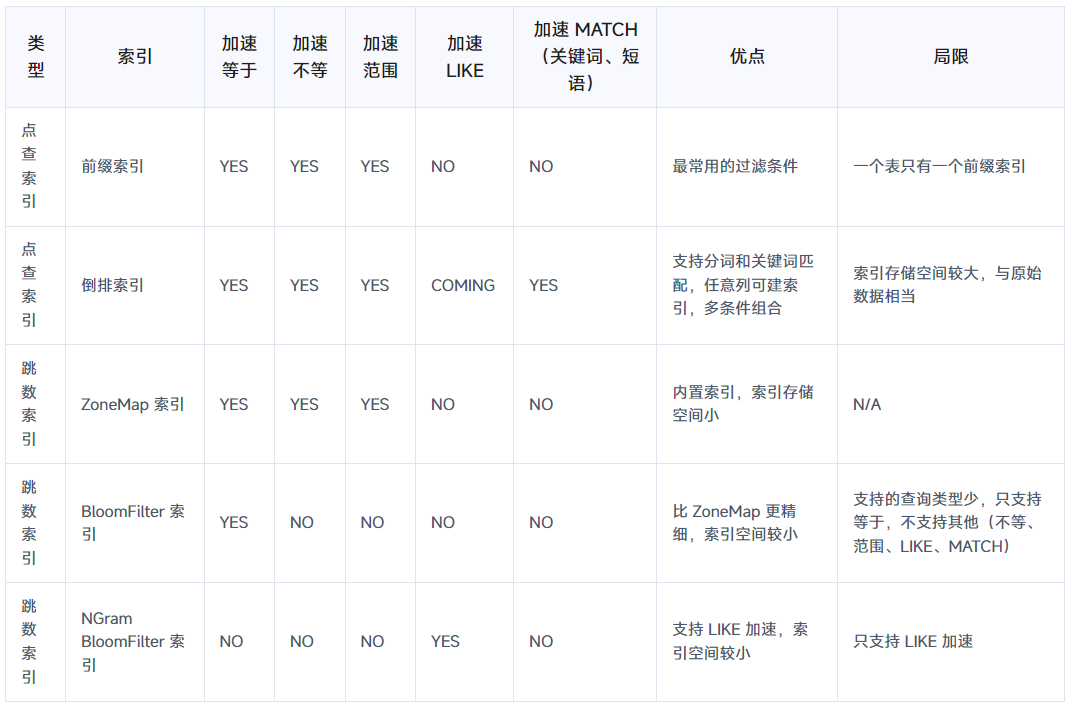
索引概述 索引对比 索引建议 (1)最频繁使用的过滤条件指定为 Key字段,自动建前缀索引,它的过滤效果最好,但是一个表只能有一个前缀索引,因此要用在最频繁的过滤条件上,前缀索引比较小ÿ…...
Java 串口通信—收发,监听数据(代码实现)
一、串口通信与串行通信的原理 串行通信是指仅用一根接收线和一根发送线,将数据以位进行依次传输的一种通讯方式,每一位数据占据一个固定的时间长度。 串口通信(Serial Communications)的概念非常简单,串口按位&#x…...

fileinput pdf编辑初始化预览
var $fileLinkInput $(#file_link_full); $fileLinkInput.fileinput({language: zh,uploadUrl: <?php echo Yii::$app->urlManager->createUrl([file/image, type > work_file]);?>,initialPreview: [defaultFile],initialPreviewAsData: true,initialPrevie…...
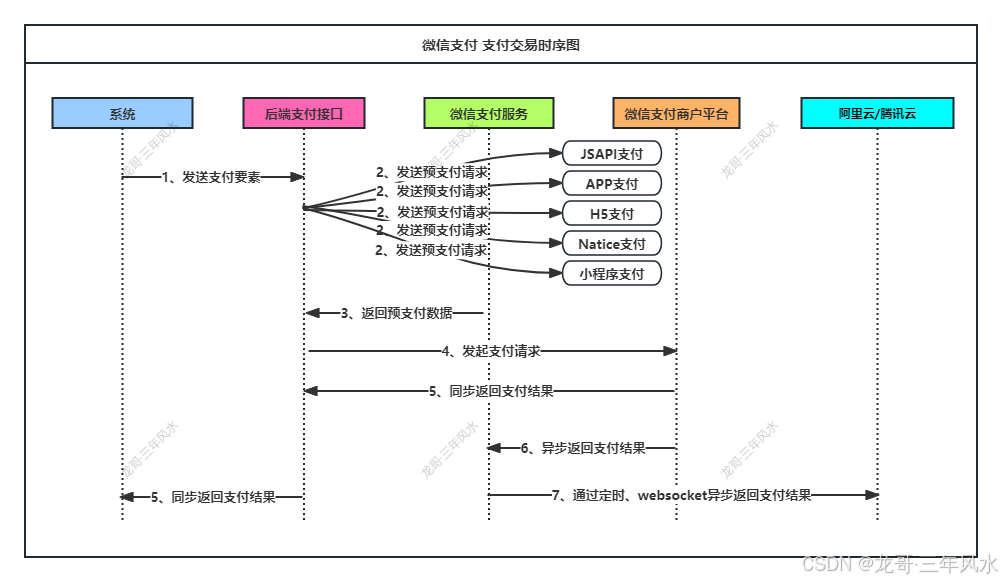
微信支付开发-需求整理及需求设计
一、客户要求 1、通过唤醒机器人参与答题项,机器人自动获取题目,用户进行答题; 2、用户答对题数与后台设置的一样或者更多,则提醒用户可以领取奖品,但是需要用户支付邮费; 3、用户在几天之内不能重复领取奖…...

vs code: pnpm : 无法加载文件 C:\Program Files\nodejs\pnpm.ps1,因为在此系统上禁止运行脚本
在visual studio code运行pnpm出错: pnpm : 无法加载文件 C:\Program Files\nodejs\pnpm.ps1,因为在此系统上禁止运行脚本 解决方案: 到C:\Program Files\nodejs文件夹下删除pnpm.ps1即可。 C:\Program Files\nodejs改成你自己的路径...
)
React Native 导航系统实战(React Navigation)
导航系统实战(React Navigation) React Navigation 是 React Native 应用中最常用的导航库之一,它提供了多种导航模式,如堆栈导航(Stack Navigator)、标签导航(Tab Navigator)和抽屉…...

从零实现富文本编辑器#5-编辑器选区模型的状态结构表达
先前我们总结了浏览器选区模型的交互策略,并且实现了基本的选区操作,还调研了自绘选区的实现。那么相对的,我们还需要设计编辑器的选区表达,也可以称为模型选区。编辑器中应用变更时的操作范围,就是以模型选区为基准来…...
【入坑系列】TiDB 强制索引在不同库下不生效问题
文章目录 背景SQL 优化情况线上SQL运行情况分析怀疑1:执行计划绑定问题?尝试:SHOW WARNINGS 查看警告探索 TiDB 的 USE_INDEX 写法Hint 不生效问题排查解决参考背景 项目中使用 TiDB 数据库,并对 SQL 进行优化了,添加了强制索引。 UAT 环境已经生效,但 PROD 环境强制索…...

PPT|230页| 制造集团企业供应链端到端的数字化解决方案:从需求到结算的全链路业务闭环构建
制造业采购供应链管理是企业运营的核心环节,供应链协同管理在供应链上下游企业之间建立紧密的合作关系,通过信息共享、资源整合、业务协同等方式,实现供应链的全面管理和优化,提高供应链的效率和透明度,降低供应链的成…...

基于当前项目通过npm包形式暴露公共组件
1.package.sjon文件配置 其中xh-flowable就是暴露出去的npm包名 2.创建tpyes文件夹,并新增内容 3.创建package文件夹...

vue3 字体颜色设置的多种方式
在Vue 3中设置字体颜色可以通过多种方式实现,这取决于你是想在组件内部直接设置,还是在CSS/SCSS/LESS等样式文件中定义。以下是几种常见的方法: 1. 内联样式 你可以直接在模板中使用style绑定来设置字体颜色。 <template><div :s…...

【决胜公务员考试】求职OMG——见面课测验1
2025最新版!!!6.8截至答题,大家注意呀! 博主码字不易点个关注吧,祝期末顺利~~ 1.单选题(2分) 下列说法错误的是:( B ) A.选调生属于公务员系统 B.公务员属于事业编 C.选调生有基层锻炼的要求 D…...
基础光照(Basic Lighting))
C++.OpenGL (10/64)基础光照(Basic Lighting)
基础光照(Basic Lighting) 冯氏光照模型(Phong Lighting Model) #mermaid-svg-GLdskXwWINxNGHso {font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:16px;fill:#333;}#mermaid-svg-GLdskXwWINxNGHso .error-icon{fill:#552222;}#mermaid-svg-GLd…...
tree 树组件大数据卡顿问题优化
问题背景 项目中有用到树组件用来做文件目录,但是由于这个树组件的节点越来越多,导致页面在滚动这个树组件的时候浏览器就很容易卡死。这种问题基本上都是因为dom节点太多,导致的浏览器卡顿,这里很明显就需要用到虚拟列表的技术&…...

CMake控制VS2022项目文件分组
我们可以通过 CMake 控制源文件的组织结构,使它们在 VS 解决方案资源管理器中以“组”(Filter)的形式进行分类展示。 🎯 目标 通过 CMake 脚本将 .cpp、.h 等源文件分组显示在 Visual Studio 2022 的解决方案资源管理器中。 ✅ 支持的方法汇总(共4种) 方法描述是否推荐…...