【项目经验分享】深度学习点云算法毕业设计项目案例定制
以下是深度学习与点云算法相关的毕业设计项目案例,涵盖了点云数据的分类、分割、重建、配准、目标检测等多个领域,适用于智能驾驶、机器人导航、3D建模等多个应用场景:
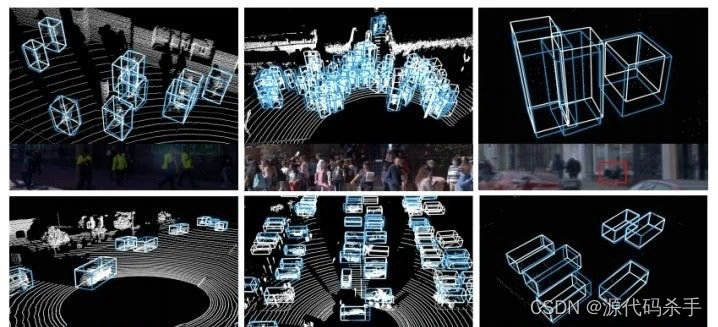
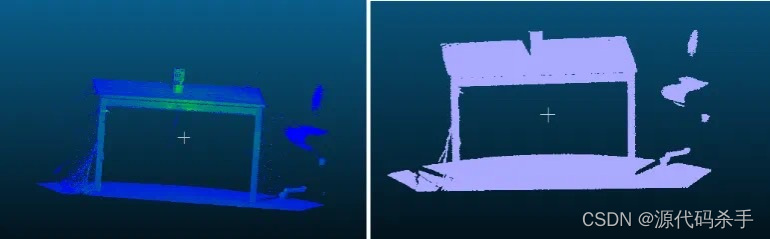
案例截图:
- 基于PointNet的3D点云分类与分割
- PointNet++在大规模点云数据中的应用
- 利用深度学习进行点云物体检测
- 基于Graph Neural Network的点云数据处理
- 基于PointCNN的点云数据分类
- 深度学习在点云特征提取中的应用
- 基于VoxelNet的3D点云目标检测
- 基于DeepVoxels的3D点云重建
- 基于深度学习的多视图点云数据融合
- 利用生成对抗网络生成3D点云模型
- 基于SparseConvNet的稀疏点云处理
- 点云下采样与深度学习联合实现的优化算法
- 基于DeepSets的点云数据分类
- 基于DGCNN的动态点云分类
- 点云数据中的监督学习与无监督学习结合
- 3D点云数据的分割与检测算法研究
- 基于深度学习的点云物体姿态估计
- 生成对抗网络在点云补全中的应用
- 基于KPConv的点云数据处理
- 点云数据的实时处理与深度学习方法
- 基于Transformer的点云数据处理
- 利用深度学习进行点云数据的降噪处理
- 点云配准与深度学习的结合应用
- 基于RNN的动态点云序列预测
- 利用深度学习的点云压缩算法
- 基于SPHNet的点云流体模拟
- 深度学习在点云数据可视化中的应用
- 多尺度点云分割的深度学习模型
- 点云与图像结合的3D重建算法
- 基于Self-Supervised Learning的点云学习
- 深度学习与点云数据的几何形状分析
- 基于3D-GAN的点云生成与补全
- 点云目标检测中的深度学习优化算法
- 利用深度学习进行点云场景理解
- 基于深度卷积网络的点云分割与分类
- 基于Lidar点云的目标检测
- 基于深度学习的点云物体表面重建
- 深度学习在点云人体姿态估计中的应用
- 基于DeepMVS的多视图点云生成
- 基于Capsule Network的点云处理
- 利用深度学习进行点云数据自动标注
- 基于深度学习的点云与RGB图像融合
- 基于PartNet的数据集进行点云分割
- 点云数据中对抗样本生成与防御
- 基于深度学习的多模态点云数据融合
- 基于3D点云的建筑物轮廓提取与重建
- 利用点云数据进行3D地图构建
- 基于深度学习的点云三维人脸识别
- 点云数据与语义分割结合的应用
- 基于3D点云数据的自动驾驶感知系统
- 深度学习在Lidar点云物体检测中的应用
- 基于稀疏卷积网络的点云处理
- 点云数据与机器学习算法结合的分类研究
- 基于点云数据的3D物体跟踪算法
- 基于深度学习的点云特征匹配
- 点云与深度学习结合的3D模型重建
- 基于点云的3D场景理解
- 基于深度学习的室内点云分割
- 点云数据中的关键点提取与匹配
- 利用3D点云数据进行姿态识别
- 基于点云数据的室内导航系统
- 基于生成模型的点云数据增强
- 基于深度学习的3D点云合成
- 点云数据与几何深度学习的结合应用
- 基于Graph-CNN的点云结构识别
- 点云数据的旋转不变性研究
- 基于点云的三维形状自动生成
- 点云配准中的深度学习优化算法
- 利用深度学习的点云去噪与补全
- 基于PointNet++的点云物体分割
- 基于点云的3D形状识别与分类
- 基于几何卷积网络的点云特征提取
- 基于Transformer的点云目标检测
- 点云与多视图结合的三维重建
- 深度学习在点云车辆检测中的应用
- 点云与RGB-D数据的融合分析
- 基于点云数据的环境建模与识别
- 基于点云的3D地形分析与重建
- 点云与SLAM技术的融合应用
- 基于GAN的点云数据生成
- 点云在3D打印中的应用
- 基于深度学习的点云配准与优化
- 基于点云的全局与局部特征提取
- 基于点云的多视图3D物体识别
- 基于深度学习的点云场景分割
- 点云与LiDAR传感器结合的自动驾驶
- 基于3D点云的骨架提取算法
- 基于点云数据的形状补全与重建
- 点云在增强现实中的应用
- 深度学习在点云物体跟踪中的应用
- 点云数据的深度聚类算法
- 基于深度学习的点云物体表面检测
- 基于PointRNN的动态点云处理
- 基于LiDAR点云数据的物体分割与识别
- 深度学习与点云特征提取的结合应用
- 基于点云的三维人体姿态识别
- 点云与几何深度学习在建筑物识别中的应用
- 基于深度学习的点云物体检测优化
- 基于深度学习的3D点云特征学习
- 点云与图像数据结合的三维重建
- 基于Transformer的点云特征提取
这些项目涵盖了点云数据处理的多个方向,既包括基本的分类与分割算法,也涉及生成对抗网络、多模态数据融合、深度学习优化等高级应用。适合对点云算法及其在智能驾驶、机器人视觉等领域应用感兴趣的学生进行深入研究。
如有需要,可进一步沟通。
相关文章:
【项目经验分享】深度学习点云算法毕业设计项目案例定制
以下是深度学习与点云算法相关的毕业设计项目案例,涵盖了点云数据的分类、分割、重建、配准、目标检测等多个领域,适用于智能驾驶、机器人导航、3D建模等多个应用场景: 案例截图: 基于PointNet的3D点云分类与分割PointNet在大规…...

【Redis 源码】2项目结构说明
1 文件目录结构 deps 这个目录主要包含 Redis 所依赖的第三方代码库。 Jemalloc,内存分配器,默认情况下选择该内存分配器来代替 Linux 系统的 libc-malloc,libc-malloc 性能不高,且碎片化严重。hiredis,这是官方 C 语…...

RP2040 C SDK GPIO和IRQ 唤醒功能使用
RP2040 C SDK GPIO和中断功能使用 SIO介绍 手册27页: The Single-cycle IO block (SIO) contains several peripherals that require low-latency, deterministic access from the processors. It is accessed via each processor’s IOPORT: this is an auxiliary…...
@Transactional导致数据库连接数不够
在Spring中进行事务管理非常简单,只需要在方法上加上注解Transactional,Spring就可以自动帮我们进行事务的开启、提交、回滚操作。甚至很多人心里已经将Spring事务Transactional划上了等号,只要有数据库相关操作就直接给方法加上Transactiona…...

python3中的string 和bytes有什么区别
在Python中,string(字符串)和bytes(字节序列)是两种不同的数据类型,分别用于表示文本和二进制数据。它们的主要区别在于存储的数据类型、编码方式以及使用场景。 1. 存储数据类型 string (字符串,str):用来表示文本数据。string是一个Unicode字符串,其中的每个字符是…...

C~排序算法
在C/C中,有多种排序算法可供选择,每种算法都有其特定的应用场景和特点。下面介绍几种常用的排序算法,包括冒泡排序、选择排序、插入排序、快速排序、归并排序和堆排序,并给出相应的示例代码和解释。 冒泡排序(Bubble …...

基于github创建个人主页
基于github创建个人主页 站在巨人的肩膀上,首先选一个创建主页的仓库进行fork,具体可以参照这篇文章https://blog.csdn.net/qd1813100174/article/details/128604858主要总结下需要修改的地方: 1)仓库名字要和github的名字一致&a…...

apt update时出现证书相关问题,可以关闭apt验证
vi /etc/apt/apt.conf.d/99disable-signature-verification 添加以下内容: Acquire::AllowInsecureRepositories "true"; Acquire::AllowDowngradeToInsecureRepositories "true"; Acquire::AllowUnauthenticated "true"; 参考链…...
进阶数据库系列(十三):PostgreSQL 分区分表
概述 在组件开发迭代的过程中,随着使用时间的增加,数据库中的数据量也不断增加,因此数据库查询越来越慢。 通常加速数据库的方法很多,如添加特定的索引,将日志目录换到单独的磁盘分区,调整数据库引擎的参…...

翻译:Recent Event Camera Innovations: A Survey
摘要 基于事件的视觉受到人类视觉系统的启发,提供了变革性的功能,例如低延迟、高动态范围和降低功耗。本文对事件相机进行了全面的调查,并追溯了事件相机的发展历程。它介绍了事件相机的基本原理,将其与传统的帧相机进行了比较&am…...

车载诊断技术:汽车健康的守护者
一、车载诊断技术的发展历程 从最初简单的硬件设备到如今智能化、网络化的系统,车载诊断技术不断演进,为汽车安全和性能提供保障。 早期的汽车诊断检测技术处于比较原始的状态,主要依靠操作经验和主观评价。随着汽车工业的发展,车载诊断技术也经历了不同的阶段。20 世纪初…...
“天翼云息壤杯”高校AI大赛开启:国云的一场“造林”计划
文 | 智能相对论 作者 | 叶远风 2024年年初《政府工作报告》中明确提到了“人工智能”行动,人工智能的发展被提到前所未有的高度。 如何落实AI在数字经济发展中引擎作用,是业界当下面临的课题。 9月25日,“2024年中国国际信息通信展览会”…...

【怎样基于Okhttp3来实现各种各样的远程调用,表单、JSON、文件、文件流等待】
HTTP客户端工具 okhttp3 form/json/multipart 提供表达、json、混合表单、混合表单文件流传输等HTTP请求调用支持自定义配置默认客户端,参数列表如下: okhtt3.config.connectTimeout 连接超时,TimeUnit.SECONDSokhtt3.config.readTimeOut 读…...

excel统计分析(3): 一元线性回归分析
简介 用途:研究两个具有线性关系的变量之间的关系。 一元线性回归分析模型: ab参数由公式可得: 判定系数R2:评估回归模型的拟合效果。值越接近1,说明拟合效果越好;值越接近0,说明拟合效果越…...

搜索引擎onesearch3实现解释和升级到Elasticsearch v8系列(一)-概述
简介 此前的专栏介绍onesearch1.0和2.0,详情参看4 参考资料,本文解释onesearch 3.0,从Elasticsearch6升级到Elasticsearch8代码实现 ,Elasticsearch8 废弃了high rest client,使用新的ElasticsearchClient,…...
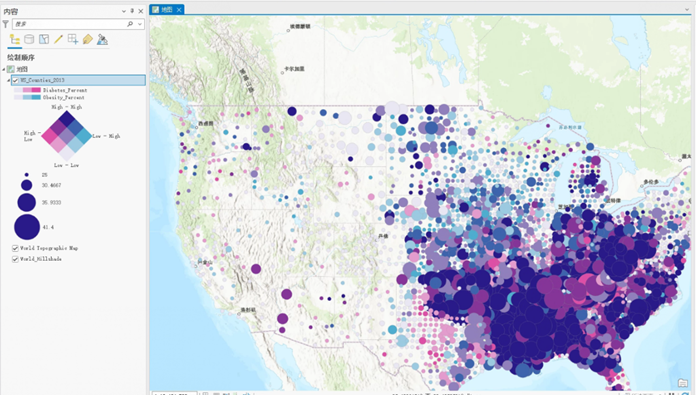
ArcGIS Pro高级地图可视化—双变量符号地图
ArcGIS Pro高级地图可视化 ——双变量符号地图 1 背景 “我不是双变量,但我很好奇。”出自2013 年南卡罗来纳州格林维尔举行的 NACIS 会议上,双变量地图随着这句俏皮的话便跳跃在人们的视角下,在讨论二元映射之后,它不仅恰逢其…...

rust属性宏
1. #[repr(xxx)] repr全称是 “representation”,即表示、展现的意思。在#[repr(u32)]中,u32表示无符号 32 位整数。这意味着被这个属性修饰的类型将以 32 位无符号整数的形式在内存中存储和布局。例如,如果有一个枚举类型被#[repr(u32)]修饰: #[repr(u32)] enum MyEnum {…...

《pyqt+open3d》open3d可视化界面集成到qt中
《pyqtopen3d》open3d可视化界面集成到qt中 一、效果显示二、代码三、资源下载 一、效果显示 二、代码 参考链接 main.py import sys import open3d as o3d from PyQt5.QtWidgets import QApplication, QMainWindow, QWidget from PyQt5.QtGui import QWindow from PyQt5.Qt…...

学习记录:js算法(四十七):相同的树
文章目录 相同的树我的思路网上思路队列序列化方法 总结 相同的树 给你两棵二叉树的根节点 p 和 q ,编写一个函数来检验这两棵树是否相同。 如果两个树在结构上相同,并且节点具有相同的值,则认为它们是相同的。 图一: 图二&…...

使用Hutool-poi封装Apache POI进行Excel的上传与下载
介绍 Hutool-poi是针对Apache POI的封装,因此需要用户自行引入POI库,Hutool默认不引入。到目前为止,Hutool-poi支持: Excel文件(xls, xlsx)的读取(ExcelReader)Excel文件(xls&…...

MySQL 隔离级别:脏读、幻读及不可重复读的原理与示例
一、MySQL 隔离级别 MySQL 提供了四种隔离级别,用于控制事务之间的并发访问以及数据的可见性,不同隔离级别对脏读、幻读、不可重复读这几种并发数据问题有着不同的处理方式,具体如下: 隔离级别脏读不可重复读幻读性能特点及锁机制读未提交(READ UNCOMMITTED)允许出现允许…...
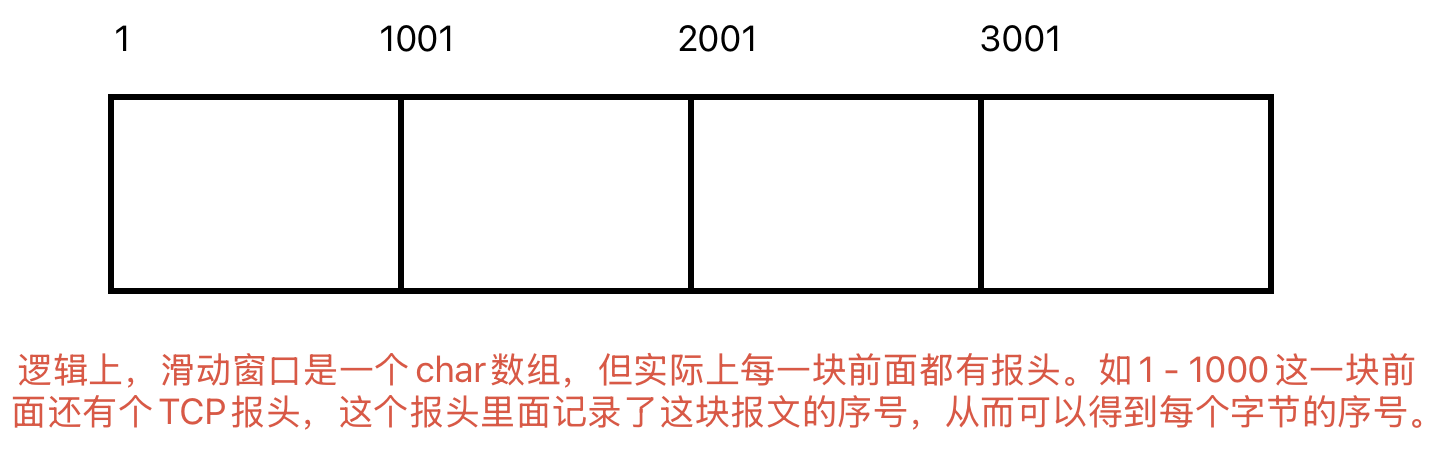
Linux相关概念和易错知识点(42)(TCP的连接管理、可靠性、面临复杂网络的处理)
目录 1.TCP的连接管理机制(1)三次握手①握手过程②对握手过程的理解 (2)四次挥手(3)握手和挥手的触发(4)状态切换①挥手过程中状态的切换②握手过程中状态的切换 2.TCP的可靠性&…...

Neo4j 集群管理:原理、技术与最佳实践深度解析
Neo4j 的集群技术是其企业级高可用性、可扩展性和容错能力的核心。通过深入分析官方文档,本文将系统阐述其集群管理的核心原理、关键技术、实用技巧和行业最佳实践。 Neo4j 的 Causal Clustering 架构提供了一个强大而灵活的基石,用于构建高可用、可扩展且一致的图数据库服务…...
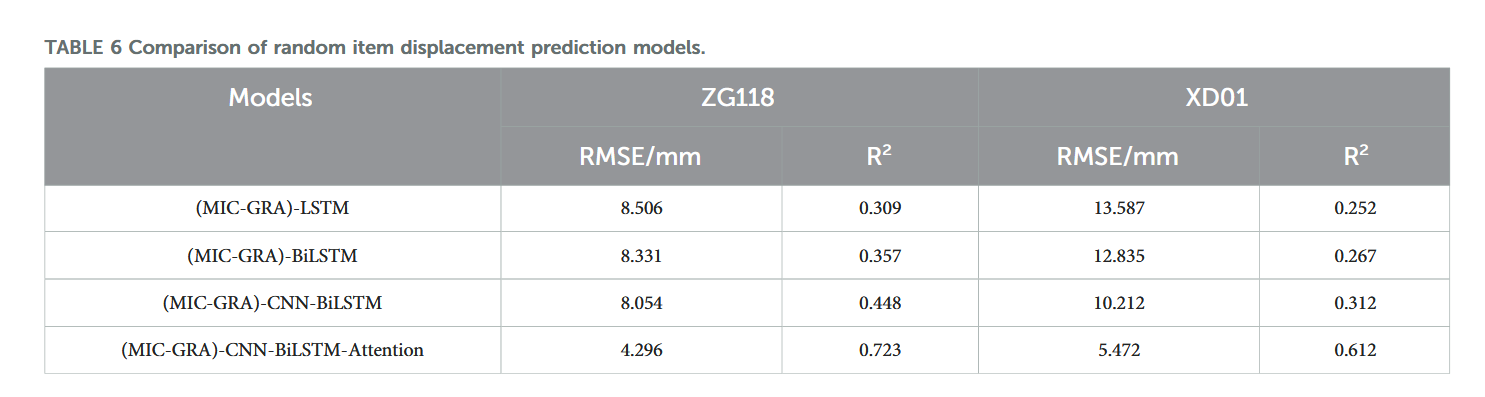
【论文阅读28】-CNN-BiLSTM-Attention-(2024)
本文把滑坡位移序列拆开、筛优质因子,再用 CNN-BiLSTM-Attention 来动态预测每个子序列,最后重构出总位移,预测效果超越传统模型。 文章目录 1 引言2 方法2.1 位移时间序列加性模型2.2 变分模态分解 (VMD) 具体步骤2.3.1 样本熵(S…...

AspectJ 在 Android 中的完整使用指南
一、环境配置(Gradle 7.0 适配) 1. 项目级 build.gradle // 注意:沪江插件已停更,推荐官方兼容方案 buildscript {dependencies {classpath org.aspectj:aspectjtools:1.9.9.1 // AspectJ 工具} } 2. 模块级 build.gradle plu…...

AI病理诊断七剑下天山,医疗未来触手可及
一、病理诊断困局:刀尖上的医学艺术 1.1 金标准背后的隐痛 病理诊断被誉为"诊断的诊断",医生需通过显微镜观察组织切片,在细胞迷宫中捕捉癌变信号。某省病理质控报告显示,基层医院误诊率达12%-15%,专家会诊…...
面向无人机海岸带生态系统监测的语义分割基准数据集
描述:海岸带生态系统的监测是维护生态平衡和可持续发展的重要任务。语义分割技术在遥感影像中的应用为海岸带生态系统的精准监测提供了有效手段。然而,目前该领域仍面临一个挑战,即缺乏公开的专门面向海岸带生态系统的语义分割基准数据集。受…...

为什么要创建 Vue 实例
核心原因:Vue 需要一个「控制中心」来驱动整个应用 你可以把 Vue 实例想象成你应用的**「大脑」或「引擎」。它负责协调模板、数据、逻辑和行为,将它们变成一个活的、可交互的应用**。没有这个实例,你的代码只是一堆静态的 HTML、JavaScript 变量和函数,无法「活」起来。 …...
算法—栈系列
一:删除字符串中的所有相邻重复项 class Solution { public:string removeDuplicates(string s) {stack<char> st;for(int i 0; i < s.size(); i){char target s[i];if(!st.empty() && target st.top())st.pop();elsest.push(s[i]);}string ret…...

GeoServer发布PostgreSQL图层后WFS查询无主键字段
在使用 GeoServer(版本 2.22.2) 发布 PostgreSQL(PostGIS)中的表为地图服务时,常常会遇到一个小问题: WFS 查询中,主键字段(如 id)莫名其妙地消失了! 即使你在…...