pytorch千问模型源码分析
# 规范化技术,旨在替代传统的 Layer Normalization(LN)
# 核心思想是对输入张量的每个样本的每个特征进行规范化,使其均值为 0,方差为 1
class Qwen2RMSNorm(nn.Module):
def __init__(self, hidden_size, eps=1e-6): # 隐藏层的大小
super().__init__()
# 一个可学习的权重参数,初始化为全 1 张量。
self.weight = nn.Parameter(torch.ones(hidden_size))
# 用于防止除零错误的小常数。
self.variance_epsilon = eps
def forward(self, hidden_states):
# 记录输入张量的数据类型,以便最终转换回原始类型。
input_dtype = hidden_states.dtype
# 转换为 torch.float32 类型,以确保数值稳定性。
hidden_states = hidden_states.to(torch.float32)
# 计算每个样本的方差
variance = hidden_states.pow(2).mean(-1, keepdim=True)
# 计算每个样本的 RMS 值,并对每个样本进行规范化
hidden_states = hidden_states * torch.rsqrt(variance + self.variance_epsilon)
# 应用可学习的权重,其中 γγ 是一个可学习的参数,用于缩放规范化后的张量。
return self.weight * hidden_states.to(input_dtype)
# 用于生成旋转位置嵌入。这种嵌入方法在 Transformer 模型中用于捕捉序列中的位置信息,尤其适用于长序列任务。
# 通过旋转的方式将位置信息编码到嵌入向量中。具体步骤如下:
# 生成频率:通过指数函数生成一系列频率值。计算正弦和余弦:利用生成的频率计算正弦和余弦值
# ,旋转嵌入:将输入向量按一定规则旋转,以嵌入位置信息。
class Qwen2RotaryEmbedding(nn.Module):
def __init__(self, dim, max_position_embeddings=2048, base=10000, device=None):
super().__init__()
self.dim = dim
# 最大位置嵌入的长度,默认为 2048,base:基数,默认为 10000。。
self.max_position_embeddings = max_position_embeddings
self.base = base
# inv_freq:计算频率的逆值。
# 位置列表先归一化(从绝对位置变成相对位置),之后取指数(1--接近10000),之后取倒数,位置从1--越来越小
inv_freq = 1.0 / (self.base ** (torch.arange(0, self.dim, 2, dtype=torch.int64).float().to(device) / self.dim))
# register_buffer:将 inv_freq 注册为缓冲区,以便在模型保存和加载时保持不变。
# register_buffer 方法用于注册一个非训练的缓冲区(buffer),这意味着它不会被梯度更新。当你使用 register_buffer 注册一个缓
# 冲区时,它会被保存在模型的状态字典(state dict)中,并且在模型保存和加载时也会被序列化。
# persistent=True:缓冲区会出现在模型的状态字典中,并且会被序列化和加载。
# persistent=False:缓冲区不会出现在模型的状态字典中,但在实际保存和加载时,仍然会被序列化并加载。
self.register_buffer("inv_freq", inv_freq, persistent=False)
# Build here to make `torch.jit.trace` work.生成正弦和余弦缓存
self._set_cos_sin_cache(
seq_len=max_position_embeddings, device=self.inv_freq.device, dtype=torch.get_default_dtype()
)
def _set_cos_sin_cache(self, seq_len, device, dtype):
self.max_seq_len_cached = seq_len
# t 是一个包含位置索引的张量,形状为 (seq_len,)。
t = torch.arange(self.max_seq_len_cached, device=device, dtype=torch.int64).type_as(self.inv_freq)
# torch.outer:计算外积,得到一个形状为 (seq_len, dim/2) 的张量
freqs = torch.outer(t, self.inv_freq) # 计算频率。
# Different from paper, but it uses a different permutation in order to obtain the same calculation
# 拼接频率。emb 的形状为 (seq_len, dim)。
# 在旋转位置嵌入(RoPE)中,我们通常将嵌入向量分为两个部分,并分别应用正弦和余弦变换。具体来说:
# 对于每个位置 tt,计算频率 ff,得到一个形状为 (seq_len, dim/2) 的张量。
# 将频率张量拼接两次,得到一个形状为 (seq_len, dim) 的张量。
# 这样做的原因是,我们将嵌入向量分为两部分,每部分对应一个频率值。
emb = torch.cat((freqs, freqs), dim=-1)
# cos_cached 和 sin_cached:注册正弦和余弦缓存。
self.register_buffer("cos_cached", emb.cos().to(dtype), persistent=False)
self.register_buffer("sin_cached", emb.sin().to(dtype), persistent=False)
def forward(self, x, seq_len=None): # x:输入张量。
# x: [bs, num_attention_heads, seq_len, head_size]
# 如果 seq_len 大于已缓存的最大长度,则重新生成缓存。
if seq_len > self.max_seq_len_cached:
self._set_cos_sin_cache(seq_len=seq_len, device=x.device, dtype=x.dtype)
return ( # 返回正弦和余弦缓存的切片。
self.cos_cached[:seq_len].to(dtype=x.dtype),
self.sin_cached[:seq_len].to(dtype=x.dtype),
)
class Qwen2MLP(nn.Module):
def __init__(self, config):
super().__init__()
self.hidden_size = config.hidden_size # d
self.intermediate_size = config.intermediate_size # hd
self.gate_proj = nn.Linear(self.hidden_size, self.intermediate_size, bias=False) # d-->hd
self.up_proj = nn.Linear(self.hidden_size, self.intermediate_size, bias=False)# d-->hd
self.down_proj = nn.Linear(self.intermediate_size, self.hidden_size, bias=False) # hd-->d
self.act_fn = ACT2FN[config.hidden_act]
def forward(self, hidden_state): # (h,s,d)
# 门控信号生成:gate_proj(hidden_state) 生成门控信号
# 特征调整:gate_output 与 up_output 相乘,将门控信号应用于特征表示。
# 门控机制的作用:通过门控信号动态调整哪些特征应该通过哪些特征应该被抑制。
# 激活函数的选择:如果 config.hidden_act 是 "sigmoid",那么激活函数将是 sigmoid
return self.down_proj(self.act_fn(self.gate_proj(hidden_state)) * self.up_proj(hidden_state))
class Qwen2Attention(nn.Module):
def __init__(self, config: Qwen2Config, layer_idx: Optional[int] = None):
super().__init__() # 调用父类的初始化方法
self.config = config # 配置类实例
self.layer_idx = layer_idx # 层索引
if layer_idx is None:
logger.warning_once(
f"Instantiating {self.__class__.__name__} without passing `layer_idx` is not recommended and will "
"to errors during the forward call, if caching is used. Please make sure to provide a `layer_idx` "
"when creating this class."
)
self.hidden_size = config.hidden_size # d
self.num_heads = config.num_attention_heads # q_h
self.head_dim = self.hidden_size // self.num_heads # dk
self.num_key_value_heads = config.num_key_value_heads # kv_h
self.num_key_value_groups = self.num_heads // self.num_key_value_heads # 比例
self.max_position_embeddings = config.max_position_embeddings # p
self.rope_theta = config.rope_theta # base
self.is_causal = True # 是否用因果掩码
self.attention_dropout = config.attention_dropout # dropout
# 嵌入维度必须能被整除
if (self.head_dim * self.num_heads) != self.hidden_size:
raise ValueError(
f"hidden_size must be divisible by num_heads (got `hidden_size`: {self.hidden_size}"
f" and `num_heads`: {self.num_heads})."
)
# 线性投影
self.q_proj = nn.Linear(self.hidden_size, self.num_heads * self.head_dim, bias=True)
#需要注意的是这里的投影维度可能和q的投影维度不同
self.k_proj = nn.Linear(self.hidden_size, self.num_key_value_heads * self.head_dim, bias=True)
self.v_proj = nn.Linear(self.hidden_size, self.num_key_value_heads * self.head_dim, bias=True)
# 最后一个线性转换层
self.o_proj = nn.Linear(self.num_heads * self.head_dim, self.hidden_size, bias=False)
# 旋转位置嵌入层
self.rotary_emb = Qwen2RotaryEmbedding(
self.head_dim, # dk
max_position_embeddings=self.max_position_embeddings,# max_position
base=self.rope_theta, # base
)
def forward(
self,
hidden_states: torch.Tensor,
attention_mask: Optional[torch.Tensor] = None,# 可选
position_ids: Optional[torch.LongTensor] = None,# 可选
past_key_value: Optional[Cache] = None, # 可选参数:缓存
output_attentions: bool = False,# 是否输出注意力权重
use_cache: bool = False, # 是否使用缓存
cache_position: Optional[torch.LongTensor] = None, # 缓存位置
) -> Tuple[torch.Tensor, Optional[torch.Tensor], Optional[Tuple[torch.Tensor]]]:
bsz, q_len, _ = hidden_states.size() # b,s,d
# 投影
query_states = self.q_proj(hidden_states)
key_states = self.k_proj(hidden_states)
value_states = self.v_proj(hidden_states)
# (b,q_len,q_h,dk)-->(b,q_h,q_len,dk),transpose:换轴(转置)
query_states = query_states.view(bsz, q_len, self.num_heads, self.head_dim).transpose(1, 2)
# (b,k_h,k_len,dk)
key_states = key_states.view(bsz, q_len, self.num_key_value_heads, self.head_dim).transpose(1, 2)
value_states = value_states.view(bsz, q_len, self.num_key_value_heads, self.head_dim).transpose(1, 2)
kv_seq_len = key_states.shape[-2] # k_len
# 缓存上个时间步的key,value表示
if past_key_value is not None: # 如果设置了缓存
if self.layer_idx is None: # 就必须有layer_idx,不然报错
raise ValueError(
f"The cache structure has changed since version v4.36. If you are using {self.__class__.__name__} "
"for auto-regressive decoding with k/v caching, please make sure to initialize the attention class "
"with a layer index."
)
kv_seq_len += past_key_value.get_usable_length(kv_seq_len, self.layer_idx)
# 旋转位置嵌入,传kv_len
# 键/值序列长度:kv_seq_len 是键和值向量的长度,这是因为键和值向量代表的是相同的序列。
# 查询序列长度:q_len 是查询向量的长度,这可能不同于键/值向量的长度。
# 旋转位置嵌入:在计算旋转位置嵌入时,使用键/值序列长度是为了确保位置信息与键和值向量一致。
cos, sin = self.rotary_emb(value_states, seq_len=kv_seq_len)
# 返回带位置信息的嵌入表示
query_states, key_states = apply_rotary_pos_emb(query_states, key_states, cos, sin, position_ids)
# 如果past_key_value is not None
if past_key_value is not None:
cache_kwargs = {"sin": sin, "cos": cos, "cache_position": cache_position} # Specific to RoPE models
# 更新
key_states, value_states = past_key_value.update(key_states, value_states, self.layer_idx, cache_kwargs)
# repeat k/v heads if n_kv_heads < n_heads
# 如果键值头数量少于查询头数量,则重复键值头以匹配查询头数量。
key_states = repeat_kv(key_states, self.num_key_value_groups)
value_states = repeat_kv(value_states, self.num_key_value_groups)
# (b,q_h,q_len,dk)@(b,k_h,dk,k_len)-->(b,h,q_len,k_len)
attn_weights = torch.matmul(query_states, key_states.transpose(2, 3)) / math.sqrt(self.head_dim)
if attn_weights.size() != (bsz, self.num_heads, q_len, kv_seq_len):
raise ValueError(
f"Attention weights should be of size {(bsz, self.num_heads, q_len, kv_seq_len)}, but is"
f" {attn_weights.size()}"
)
# 切片,在最后一个维度切出q_len的长度
if attention_mask is not None: # no matter the length, we just slice it
causal_mask = attention_mask[:, :, :, : key_states.shape[-2]]
# 相加,一般遮挡的地方是很大的负数
attn_weights = attn_weights + causal_mask
# upcast attention to fp32
# 在q_len上归一化,得到query序列中每个token对应key中token的一系列权重,这些权重中较大的值表示和当前query中的token
# 相似度较近,较小的表示离当前query中token较远
attn_weights = nn.functional.softmax(attn_weights, dim=-1, dtype=torch.float32).to(query_states.dtype)
# dropout
attn_weights = nn.functional.dropout(attn_weights, p=self.attention_dropout, training=self.training)
# (b,h,q_len,k_len)@(b,h,v_len,dk)-->(b,h,q_len,dk)
attn_output = torch.matmul(attn_weights, value_states)
if attn_output.size() != (bsz, self.num_heads, q_len, self.head_dim):
raise ValueError(
f"`attn_output` should be of size {(bsz, self.num_heads, q_len, self.head_dim)}, but is"
f" {attn_output.size()}"
)
# (b,h,q_len,dk)-->(b,h,q_len,h,dk),之后.contiguous()转为内存连续存储
attn_output = attn_output.transpose(1, 2).contiguous()
# (b,h,q_len,h,dk)-->(b,h,d)
attn_output = attn_output.reshape(bsz, q_len, self.hidden_size)
# 最后经过线性转换
attn_output = self.o_proj(attn_output)
# 不输出注意力权重
if not output_attentions:
attn_weights = None
# 返回多头注意力的输出,注意力权重,上个时间步的key_value的缓存
return attn_output, attn_weights, past_key_value
相关文章:

pytorch千问模型源码分析
# 规范化技术,旨在替代传统的 Layer Normalization(LN) # 核心思想是对输入张量的每个样本的每个特征进行规范化,使其均值为 0,方差为 1 class Qwen2RMSNorm(nn.Module): def __init__(self, hidden_size, eps1e-6…...

滚雪球学SpringCloud[1.3]:SpringCloud环境搭建
全文目录: 前言1.3.1 环境要求1. JDK2. Maven3. IDE4. 其他工具 1.3.2 初始化Spring Boot项目方法一:使用Spring Initializr方法二:使用IDE项目结构 1.3.3 引入Spring Cloud依赖1. 更新pom.xml2. 添加Spring Cloud Starter依赖3. 示例完整的p…...

9.28今日错题解析(软考)
目录 前言面向对象技术——UML软件工程——软件能力成熟度模型(CMM)程序设计语言——编译 前言 这是用来记录我备考软考设计师的错题的,今天知识点为UML、软件能力成熟度模型(CMM)和编译,大部分错题摘自希…...

【Vue】以RuoYi框架前端为例,ElementUI封装图片上传组件——将图片信息转成base64后提交到后端保存
RuoYi 框架本身对于图片上传功能,在ElementUI的 <el-upload> 组件的基础装封装了 /components/ImageUpload/index.vue 组件。本组件就是在 RuoYi 自定义的 <ImageUpload> 组件的基础上进行改造,将图片的信息在上传之前处理成 base64 格式&am…...

【Linux】驱动的基本架构和编译
驱动源码 /** Silicon Integrated Co., Ltd haptic sih688x haptic driver file** Copyright (c) 2021 kugua <daokuan.zhusi-in.com>** This program is free software; you can redistribute it and/or modify it* under the terms of the GNU General Public Licen…...

1013. 将数组分成和相等的三个部分 数组切分
1013. 将数组分成和相等的三个部分 已解答 简单 相关标签 相关企业 提示 给你一个整数数组 arr,只有可以将其划分为三个和相等的 非空 部分时才返回 true,否则返回 false。 形式上,如果可以找出索引 i 1 < j 且满足 (arr[0] arr[…...

【深度学习】—— 自动微分、非标量变量的反向传播、 分离计算、 Python控制流的梯度计算
【深度学习】—— 自动微分 自动微分一个简单的例子 非标量变量的反向传播分离计算Python控制流的梯度计算 自动微分 求导是⼏乎所有深度学习优化算法的关键步骤。虽然求导的计算很简单,只需要⼀些基本的微积分。但对于复杂的模型,⼿⼯进⾏更新是⼀件很…...

Java项目实战II基于Java+Spring Boot+MySQL的大学城水电管理系统(源码+数据库+文档)
目录 一、前言 二、技术介绍 三、系统实现 四、文档参考 五、核心代码 六、源码获取 全栈码农以及毕业设计实战开发,CSDN平台Java领域新星创作者 一、前言 随着大学城规模的不断扩大和学生数量的急剧增加,大学城内的水电管理面临着前所未有的挑战…...

Vue 组件的三大组成部分详解
文章目录 模板(template)脚本(script)样式(style)总结 在 Vue.js 中,组件是构建用户界面的重要基石。一个 Vue 组件通常由三个主要部分组成:模板(template)、…...

深入理解Java内部类
一、什么是内部类 内部类是定义在另一个类内部的类。内部类与外部类(Enclosing Class)之间存在着紧密的联系,可以访问外部类的成员变量和方法,这使得它们在某些场景下非常有用。 1.1 内部类的分类 Java中的内部类主要有以下几种…...

fiddler抓包12_篡改请求(请求前断点)
课程大纲 原理 正常“客户端-服务器”通信,即发送请求,接收返回。 Fiddler抓包是「客户端-浏览器」进行交互时,请求和响应都会从Fiddler通过,Fiddler可以捕获并展示。 请求前断点(BreakPoint Before Request࿰…...

Webpack和GuIp打包原理以及不同
Webpack打包原理 Webpack的打包原理主要基于模块化的概念,它将应用程序中的所有资源(如JS、CSS、图片等)视为模块,并根据模块间的依赖关系进行静态分析。Webpack会递归地构建一个依赖关系图(dependency graph…...
c++与Python用笛卡尔的心形函数输出爱心
我突然想到输出爱心是否可以用笛卡尔的心形函数 在IDLE里用Python输出下面这个图形 在小熊猫c里用c输出下面这个图形 如果当你要输出这些的时候会怎么办 低级:纯输出 print( ********* ********* ***************** ***************** …...

Mybatis 9种动态 sql 标签使用
MyBatis提供了9种动态SQL标签:trim、where、set、foreach、if、choose、when、otherwise、bind; 1.if 标签 <select id"getUser">select * from User<where><if test" age ! null ">and age > #{age}</if…...

OpenHarmony(鸿蒙南向)——平台驱动开发【PIN】
往期知识点记录: 鸿蒙(HarmonyOS)应用层开发(北向)知识点汇总 鸿蒙(OpenHarmony)南向开发保姆级知识点汇总~ 持续更新中…… 概述 功能简介 PIN即管脚控制器,用于统一管理各SoC的…...

南平自闭症寄宿制学校:让孩子自信绽放
在繁华与喧嚣交织的都市之中,有一片静谧而充满希望的土地——广州星贝育园自闭症儿童寄宿制学校,这里不仅是知识的殿堂,更是自闭症儿童心灵成长的温馨家园。星贝育园,以其独特的教育理念与细致入微的关怀,为这些特殊的…...

汽车总线之---- LIN总线
Introduction LIN总线的简介,对于传统的这种点对点的连接方式,我们可以看到ECU相关的传感器和执行器是直接连接到ECU的,当传感器和执行器的数量较少时,这样的连接方式是能满足要求的,但是随着汽车电控功能数量的不断增…...

Android开发MPAndroidChart两条折线图
Android开发MPAndroidChart两条折线图 Android开发两条折线图效果,还是有一定难度的,难点它的起点不是坐标0的开始,还有数值上有背景图 一、思路: 用的是MPAndroidChart的BarChart 二、效果图: 三、关键代码&#…...

HTML-ES6.0核心技术
1.ES6简介 ECMAScript 6.0(以下简称 ES6)是 JavaScript 语言的下一代标准,已经在2015年6月正式发布了。它的目标,是使得 JavaScript 语言可以用来编写复杂的大型应用程序,成为企业级开发语言。ECMAScript 和 JavaScri…...

车间调度问题数学建模与CPLEX优化
完成了这些基础研究工作,整理成文档以供参考 序言... i 第一章 引言... 1 1.1 车间调度问题概述... 1 1.2 车间调度问题分类表示法... 5 1.3 车间调度对制造企业的作用... 6 1.4 本章小结... 7 第二章 CPLEX基础... 8 2.1 CPLEX概述... 8 2.1.1 CPLEX简介.…...
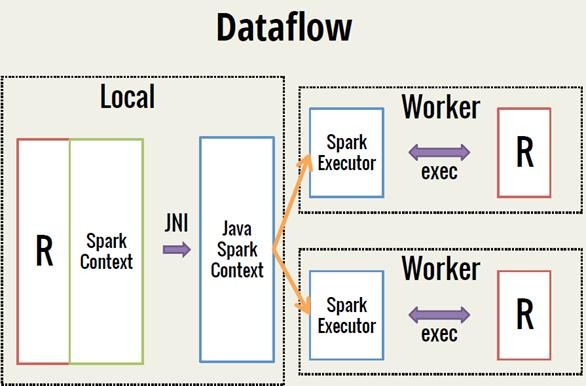
Spark 之 入门讲解详细版(1)
1、简介 1.1 Spark简介 Spark是加州大学伯克利分校AMP实验室(Algorithms, Machines, and People Lab)开发通用内存并行计算框架。Spark在2013年6月进入Apache成为孵化项目,8个月后成为Apache顶级项目,速度之快足见过人之处&…...

MongoDB学习和应用(高效的非关系型数据库)
一丶 MongoDB简介 对于社交类软件的功能,我们需要对它的功能特点进行分析: 数据量会随着用户数增大而增大读多写少价值较低非好友看不到其动态信息地理位置的查询… 针对以上特点进行分析各大存储工具: mysql:关系型数据库&am…...

关于iview组件中使用 table , 绑定序号分页后序号从1开始的解决方案
问题描述:iview使用table 中type: "index",分页之后 ,索引还是从1开始,试过绑定后台返回数据的id, 这种方法可行,就是后台返回数据的每个页面id都不完全是按照从1开始的升序,因此百度了下,找到了…...

鸿蒙中用HarmonyOS SDK应用服务 HarmonyOS5开发一个医院查看报告小程序
一、开发环境准备 工具安装: 下载安装DevEco Studio 4.0(支持HarmonyOS 5)配置HarmonyOS SDK 5.0确保Node.js版本≥14 项目初始化: ohpm init harmony/hospital-report-app 二、核心功能模块实现 1. 报告列表…...

Spring Boot+Neo4j知识图谱实战:3步搭建智能关系网络!
一、引言 在数据驱动的背景下,知识图谱凭借其高效的信息组织能力,正逐步成为各行业应用的关键技术。本文聚焦 Spring Boot与Neo4j图数据库的技术结合,探讨知识图谱开发的实现细节,帮助读者掌握该技术栈在实际项目中的落地方法。 …...
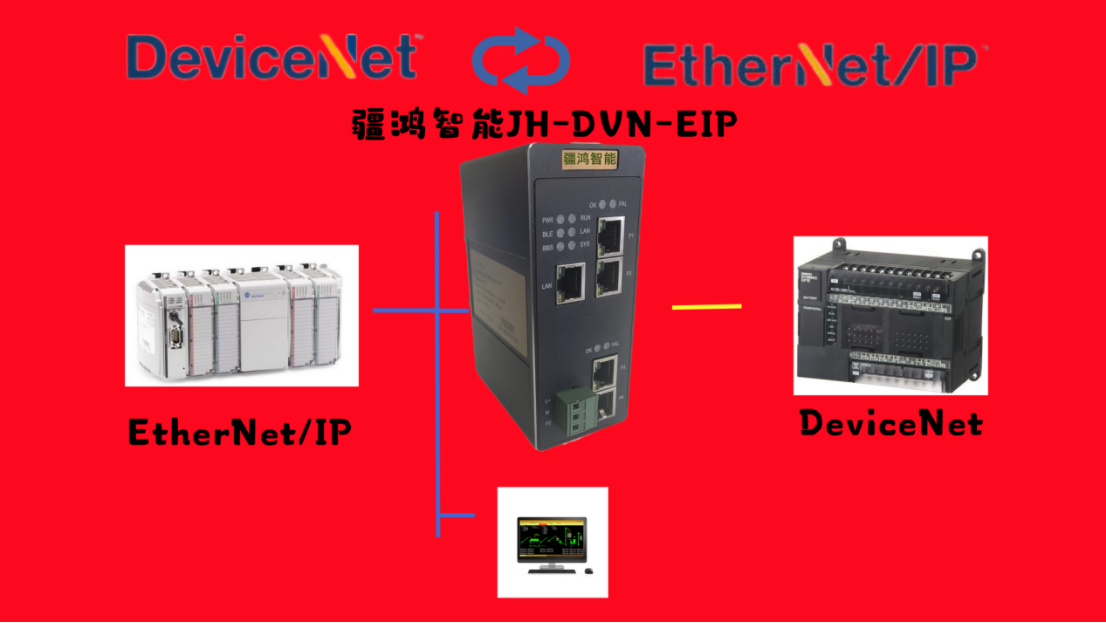
EtherNet/IP转DeviceNet协议网关详解
一,设备主要功能 疆鸿智能JH-DVN-EIP本产品是自主研发的一款EtherNet/IP从站功能的通讯网关。该产品主要功能是连接DeviceNet总线和EtherNet/IP网络,本网关连接到EtherNet/IP总线中做为从站使用,连接到DeviceNet总线中做为从站使用。 在自动…...

【HTTP三个基础问题】
面试官您好!HTTP是超文本传输协议,是互联网上客户端和服务器之间传输超文本数据(比如文字、图片、音频、视频等)的核心协议,当前互联网应用最广泛的版本是HTTP1.1,它基于经典的C/S模型,也就是客…...
多光源(Multiple Lights))
C++.OpenGL (14/64)多光源(Multiple Lights)
多光源(Multiple Lights) 多光源渲染技术概览 #mermaid-svg-3L5e5gGn76TNh7Lq {font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:16px;fill:#333;}#mermaid-svg-3L5e5gGn76TNh7Lq .error-icon{fill:#552222;}#mermaid-svg-3L5e5gGn76TNh7Lq .erro…...
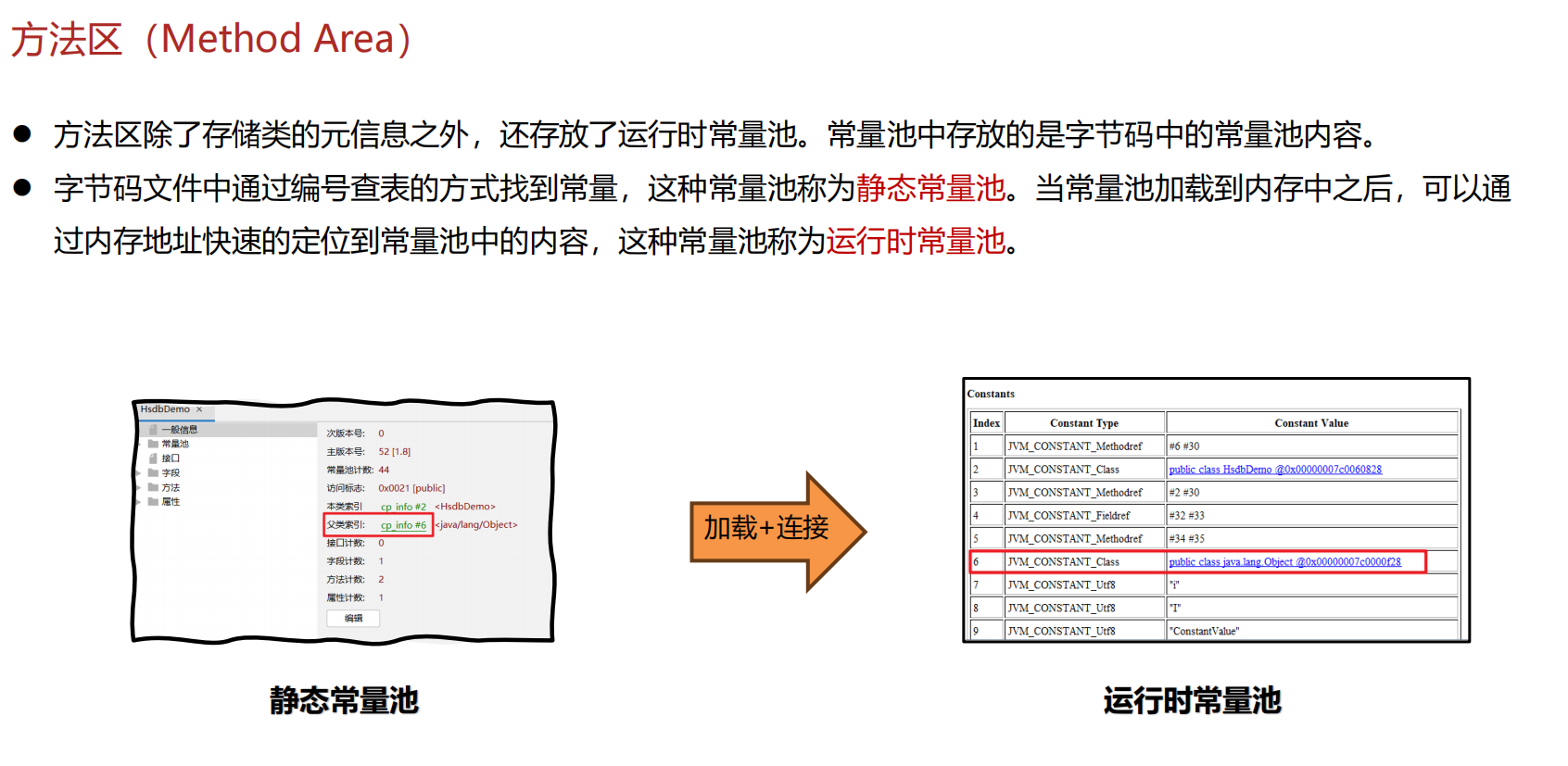
JVM 内存结构 详解
内存结构 运行时数据区: Java虚拟机在运行Java程序过程中管理的内存区域。 程序计数器: 线程私有,程序控制流的指示器,分支、循环、跳转、异常处理、线程恢复等基础功能都依赖这个计数器完成。 每个线程都有一个程序计数…...

Caliper 配置文件解析:fisco-bcos.json
config.yaml 文件 config.yaml 是 Caliper 的主配置文件,通常包含以下内容: test:name: fisco-bcos-test # 测试名称description: Performance test of FISCO-BCOS # 测试描述workers:type: local # 工作进程类型number: 5 # 工作进程数量monitor:type: - docker- pro…...