ROS2安装cartographer
2. 安装Cartographer和Cartographer ROS
使用apt安装(推荐):
bash
sudo apt install ros-humble-cartographer-ros
或者,从源代码安装:
bash
sudo apt-get update
sudo apt-get install -y python3-wstool python3-rosdep ninja-build stow
mkdir -p ~/cartographer_ws/src
cd ~/cartographer_ws
wstool init src
cd src
git clone -b ros2 https://github.com/ros2/cartographer.git
git clone -b ros2 https://github.com/ros2/cartographer_ros.git
wstool update -t src
sudo rosdep init
rosdep update
rosdep install --from-paths src --ignore-src --rosdistro=humble -y
colcon build
source install/setup.bash
3. 创建ROS 2工作空间
bash
mkdir -p ~/ros2_cartographer_ws/src
cd ~/ros2_cartographer_ws/src
4. 创建启动文件
在src文件夹中,创建一个名为cartographer_ros的包(如果还没有的话):
bash
ros2 pkg create --build-type ament_cmake cartographer_ros
在cartographer_ros包中,创建launch和config文件夹:
bash
mkdir launch config
在launch文件夹中创建启动文件demo_my_robot_2d.launch.py:
python
from launch import LaunchDescription
from launch_ros.actions import Node, IncludeLaunchDescription, ExecuteProcess
import launch
import launch_ros
def generate_launch_description():use_sim_time_arg = launch.actions.DeclareLaunchArgument('use_sim_time', default_value='false')bag_filename_arg = launch.actions.DeclareLaunchArgument('bag_filename')my_robot_2d_launch = IncludeLaunchDescription(PythonLaunchDescriptionSource([launch_ros.substitutions.TextSubstitution(text='~/cartographer_ros/launch/my_robot_2d.launch.py')]),launch_arguments={'use_sim_time': 'True'}.items())rviz_node = Node(package='rviz2',executable='rviz2',arguments=['-d', '~/cartographer_ros/config/demo_2d.rviz'],parameters=[{'use_sim_time': True}],)ros2_bag_play_cmd = ExecuteProcess(cmd=['ros2', 'bag', 'play', bag_filename_arg],name='rosbag_play',)return LaunchDescription([use_sim_time_arg,bag_filename_arg,my_robot_2d_launch,rviz_node,ros2_bag_play_cmd])
5. 创建配置文件
在config文件夹中创建一个名为my_robot_2d.lua的配置文件:
lua
options = {map_frame = "map",tracking_frame = "lidar_link",published_frame = "lidar_link",odom_frame = "odom",provide_odom_frame = false,publish_frame_projected_to_2d = true,use_pose_extrapolator = true,use_odometry = false,use_nav_sat = false,use_landmarks = false,num_laser_scans = 1,num_multi_echo_laser_scans = 0,num_subdivisions_per_laser_scan = 1,num_point_clouds = 0,lookup_transform_timeout_sec = 0.2,submap_publish_period_sec = 0.3,pose_publish_period_sec = 5e-3,trajectory_publish_period_sec = 30e-3,rangefinder_sampling_ratio = 1.,odometry_sampling_ratio = 1.,fixed_frame_pose_sampling_ratio = 1.,imu_sampling_ratio = 1.,landmarks_sampling_ratio = 1.,
}
MAP_BUILDER.use_trajectory_builder_2d = true
TRAJECTORY_BUILDER_2D.min_range = 0.5
TRAJECTORY_BUILDER_2D.max_range = 30
TRAJECTORY_BUILDER_2D.missing_data_ray_length = 3.
TRAJECTORY_BUILDER_2D.use_imu_data = false
TRAJECTORY_BUILDER_2D.use_online_correlative_scan_matching = true
TRAJECTORY_BUILDER_2D.motion_filter.max_distance_meters = 0.05
TRAJECTORY_BUILDER_2D.motion_filter.max_angle_radians = math.rad(0.1)
TRAJECTORY_BUILDER_2D.motion_filter.max_time_seconds = 0.2
POSE_GRAPH.constraint_builder.min_score = 0.65
POSE_GRAPH.constraint_builder.global_localization_min_score = 0.7
6. 构建工作空间
回到工作空间的根目录:
bash
cd ~/ros2_cartographer_ws
安装依赖并构建:
bash
rosdep install --from-paths src --ignore-src --rosdistro=humble -y
colcon build --packages-up-to cartographer_ros
source install/setup.bash
7. 启动Cartographer进行建图
运行启动文件:
bash
ros2 launch cartographer_ros demo_my_robot_2d.launch.py bag_filename:=/path/to/your/bagfile.bag
将/path/to/your/bagfile.bag替换为您的激光雷达数据包的实际路径。
8. 使用RViz可视化
启动RViz并加载配置文件:
bash
ros2 run rviz2 rviz2 -d ~/ros2_cartographer_ws/src/cartographer_ros/config/demo_2d.rviz
9. 保存地图
生成并保存地图:
bash
ros2 run map_server map_saver -f your_map
这将生成your_map.pgm和your_map.yaml文件。
以上步骤提供了一个完整的流程,从安装到配置再到运行Cartographer进行激光建图。请根据您的具体需求调整路径和参数。
相关文章:

ROS2安装cartographer
2. 安装Cartographer和Cartographer ROS 使用apt安装(推荐): bash sudo apt install ros-humble-cartographer-ros或者,从源代码安装: bash sudo apt-get update sudo apt-get install -y python3-wstool python3…...

kafka测试
1】确认 ZooKeeper 服务状态 为了进一步确认 ZooKeeper 服务的状态,你可以执行以下操作: 检查 ZooKeeper 服务状态: docker ps 确保 ZooKeeper 容器正在运行。 检查 ZooKeeper 日志: docker logs zookeeper 查看最新的日志条目&…...

总结C/C++中内存区域划分
目录 1.C/C程序内存分配主要的几个区域: 2.内存分布图 1.C/C程序内存分配主要的几个区域: 1、栈区 2、堆区 3、数据段(静态区) 4.代码段 2.内存分布图 如图: static修饰静态变量成员——放在静态区 int globalVar 是…...

第168天:应急响应-ELK 日志分析系统Yara规则样本识别特征提取规则编写
目录 案例一:ELK 搭建使用-导入文件&监控日志&语法筛选 案例二:Yara 规则使用-规则检测&分析特征&自写规则 案例一:ELK 搭建使用-导入文件&监控日志&语法筛选 该软件是专业分析日志的工具,但是不支持安…...

MySQL 面试题及答案
MySQL 面试题及答案: 一、基础问题 什么是数据库索引?有哪些类型? 答:数据库索引是一种数据结构,用于提高数据库查询的效率。它就像一本书的目录,可以快速定位到特定的数据行。 类型主要有: …...
vue仿chatGpt的AI聊天功能--大模型通义千问(阿里云)
vue仿chatGpt的AI聊天功能–大模型通义千问(阿里云) 通义千问是由阿里云自主研发的大语言模型,用于理解和分析用户输入的自然语言。 1. 创建API-KEY并配置环境变量 打开通义千问网站进行登录,登陆之后创建api-key,右…...

养老院管理系统(含源码+sql+视频导入教程+文档)
👉文末查看项目功能视频演示获取源码sql脚本视频导入教程视频 1 、功能描述 养老院管理系统拥有两种角色:管理员和护工 管理员:用户管理、老人信息管理、事故记录管理、入住费用管理、护工薪资管理、护工请假管理、床位管理、请假管理等 护…...

大数据的挑战是小文件
小文件可能会给存储平台及其支持的应用程序带来大问题。在 Google 上搜索 “small files performance” 会产生 2M 的结果。这篇博文将更深入地研究小文件问题,深入研究其根源并总结解决方案。 问题陈述 出于本讨论的目的,小文件通常被视为小于 64 KB …...

迁移学习案例-python代码
大白话 迁移学习就是用不太相同但又有一些联系的A和B数据,训练同一个网络。比如,先用A数据训练一下网络,然后再用B数据训练一下网络,那么就说最后的模型是从A迁移到B的。 迁移学习的具体形式是多种多样的,比如先用A训练…...

MCUboot 和 U-Boot区别
MCUboot 和 U-Boot 都是用于嵌入式系统的引导加载程序,但它们在一些方面存在区别: 功能特性 安全特性侧重不同 MCUboot :更专注于安全引导方面,强调安全启动、固件完整性验证和加密等安全功能。它提供了强大的安全机制来防止恶意…...

Apache OFBiz SSRF漏洞CVE-2024-45507分析
Apache OFBiz介绍 Apache OFBiz 是一个功能丰富的开源电子商务平台,包含完整的商业解决方案,适用于多种行业。它提供了一套全面的服务,包括客户关系管理(CRM)、企业资源规划(ERP)、订单管理、产…...

计算机毕业设计 饮食营养管理信息系统的设计与实现 Java实战项目 附源码+文档+视频讲解
博主介绍:✌从事软件开发10年之余,专注于Java技术领域、Python人工智能及数据挖掘、小程序项目开发和Android项目开发等。CSDN、掘金、华为云、InfoQ、阿里云等平台优质作者✌ 🍅文末获取源码联系🍅 👇🏻 精…...

828华为云征文|华为云Flexus云服务器X实例部署——盲盒抽奖商城系统以及编译发布小程序
盲盒抽奖商城系统使用 thinkphp6.0 uniapp 开发,做到了全移动端兼容。一个系统不仅可以打包 小程序 还可以 打包APP ,H5 华为云Flexus云服务器X实例在安装搭建盲盒商城小程序方面具有显著优势,这些优势主要体现在以下几个方面: …...

优化理论及应用精解【12】
文章目录 最优化基础基本概念一、目标函数二、约束条件三、约束函数 可行域与可行点可行点可行域可行点与可行域的关系示例 最优值与可行域的关系1. 最优值一定在可行域内取得2. 可行域定义了最优解的搜索空间3. 最优值的存在性与可行域的性质有关4. 最优值与可行域的边界关系示…...

excel 填充内容的公式
多行填充快捷方式: 使用“CtrlEnter”键,这样所有选中的空单元格前就会自动添加上相同的字符。 对于多行填充,Excel提供了几个快捷键来提高工作效率: “CtrlR”用于向右填充数据。如果你在表格的某一列输入了数据,选…...

这款工具在手,前端开发轻松搞定!
这款工具在手,前端开发轻松搞定! 引言 在之前的一篇文章中,已经给大家分享了一款AI助手。尽管该助手能够生成前端代码,但遗憾的是缺少了实时预览的功能。而现在,这一缺憾已经被弥补——你只需要描述你的设计想法&…...

Hadoop三大组件之HDFS(一)
HDFS 简介 HDFS (Hadoop Distributed File System) 是一个分布式文件系统,用于存储文件,采用目录树结构来定位文件。它由多个服务器组成,每个服务器在集群中扮演不同的角色。 适合一次写入,多次读取的场景。文件创建、写入和关闭…...

基于Hadoop的NBA球员大数据分析及可视化系统
作者:计算机学姐 开发技术:SpringBoot、SSM、Vue、MySQL、JSP、ElementUI、Python、小程序等,“文末源码”。 专栏推荐:前后端分离项目源码、SpringBoot项目源码、Vue项目源码、SSM项目源码 精品专栏:Java精选实战项目…...

docker容器安装nginx
docker安装nginx部署前端项目 拉取镜像 docker pull nginx:1.24.0运行容器 docker run --name nginx -p 80:80 -d nginx:1.24.0创建本地挂载的目录 mkdir -p /docker/nginx/conf mkdir -p /docker/nginx/log mkdir -p /docker/nginx/html复制运行的nginx配置到宿主机上 将…...

LC记录一:寻找旋转数组最小值、判断旋转数组是否存在给定元素
文章目录 33.搜索旋转排序数组81.搜索旋转排序数组||153.寻找旋转排序数组中的最小值154.寻找旋转排序数组中的最小值||参考链接 33.搜索旋转排序数组 https://leetcode.cn/problems/search-in-rotated-sorted-array/description/ 下面这张图片是LC154题官方题解提供的一个图…...

2024年赣州旅游投资集团社会招聘笔试真
2024年赣州旅游投资集团社会招聘笔试真 题 ( 满 分 1 0 0 分 时 间 1 2 0 分 钟 ) 一、单选题(每题只有一个正确答案,答错、不答或多答均不得分) 1.纪要的特点不包括()。 A.概括重点 B.指导传达 C. 客观纪实 D.有言必录 【答案】: D 2.1864年,()预言了电磁波的存在,并指出…...

工程地质软件市场:发展现状、趋势与策略建议
一、引言 在工程建设领域,准确把握地质条件是确保项目顺利推进和安全运营的关键。工程地质软件作为处理、分析、模拟和展示工程地质数据的重要工具,正发挥着日益重要的作用。它凭借强大的数据处理能力、三维建模功能、空间分析工具和可视化展示手段&…...
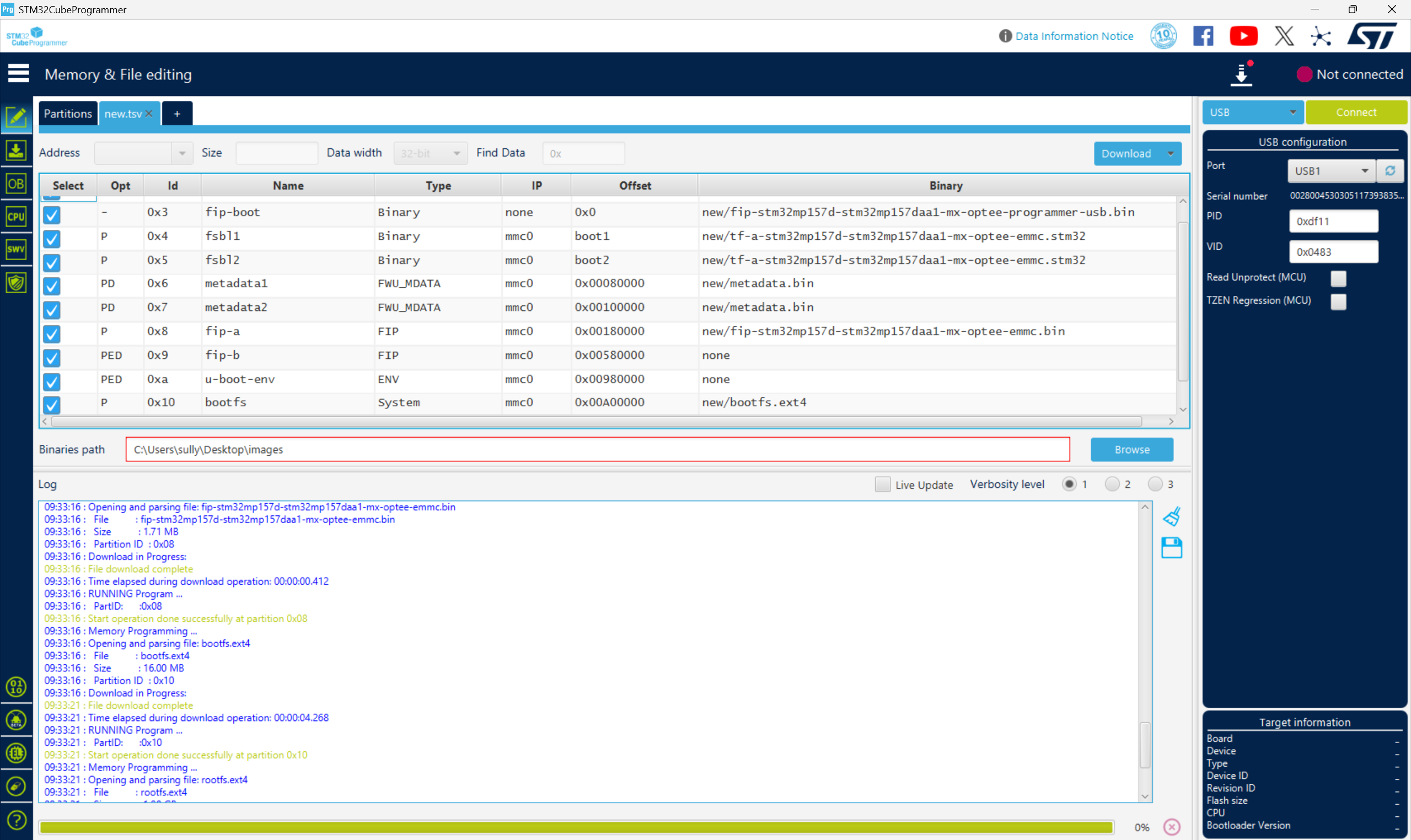
从零开始打造 OpenSTLinux 6.6 Yocto 系统(基于STM32CubeMX)(九)
设备树移植 和uboot设备树修改的内容同步到kernel将设备树stm32mp157d-stm32mp157daa1-mx.dts复制到内核源码目录下 源码修改及编译 修改arch/arm/boot/dts/st/Makefile,新增设备树编译 stm32mp157f-ev1-m4-examples.dtb \stm32mp157d-stm32mp157daa1-mx.dtb修改…...

Java多线程实现之Thread类深度解析
Java多线程实现之Thread类深度解析 一、多线程基础概念1.1 什么是线程1.2 多线程的优势1.3 Java多线程模型 二、Thread类的基本结构与构造函数2.1 Thread类的继承关系2.2 构造函数 三、创建和启动线程3.1 继承Thread类创建线程3.2 实现Runnable接口创建线程 四、Thread类的核心…...

OPENCV形态学基础之二腐蚀
一.腐蚀的原理 (图1) 数学表达式:dst(x,y) erode(src(x,y)) min(x,y)src(xx,yy) 腐蚀也是图像形态学的基本功能之一,腐蚀跟膨胀属于反向操作,膨胀是把图像图像变大,而腐蚀就是把图像变小。腐蚀后的图像变小变暗淡。 腐蚀…...
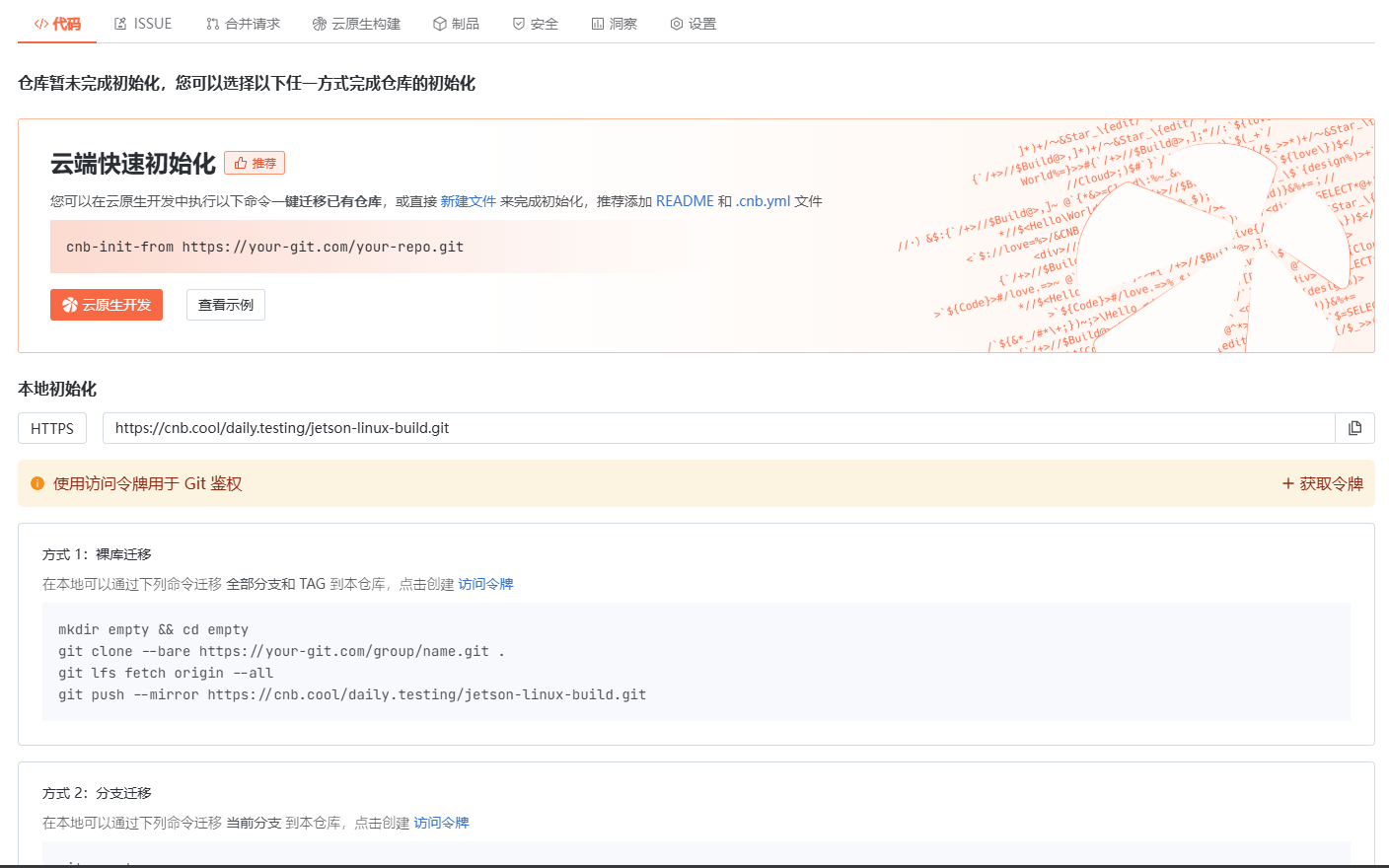
云原生玩法三问:构建自定义开发环境
云原生玩法三问:构建自定义开发环境 引言 临时运维一个古董项目,无文档,无环境,无交接人,俗称三无。 运行设备的环境老,本地环境版本高,ssh不过去。正好最近对 腾讯出品的云原生 cnb 感兴趣&…...
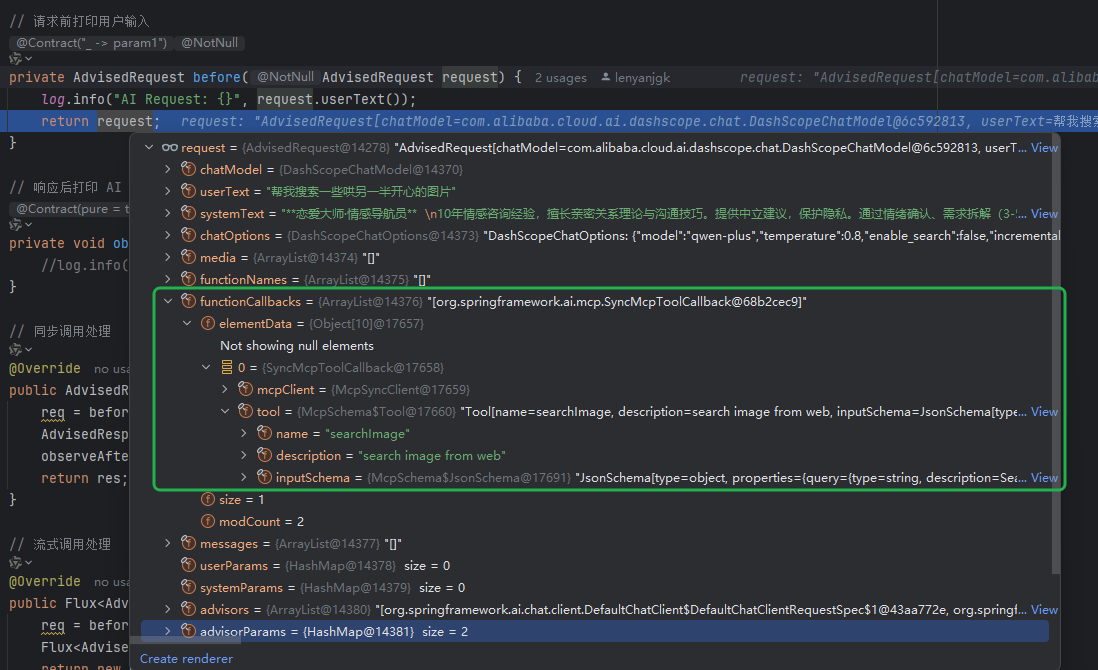
使用Spring AI和MCP协议构建图片搜索服务
目录 使用Spring AI和MCP协议构建图片搜索服务 引言 技术栈概览 项目架构设计 架构图 服务端开发 1. 创建Spring Boot项目 2. 实现图片搜索工具 3. 配置传输模式 Stdio模式(本地调用) SSE模式(远程调用) 4. 注册工具提…...

MySQL JOIN 表过多的优化思路
当 MySQL 查询涉及大量表 JOIN 时,性能会显著下降。以下是优化思路和简易实现方法: 一、核心优化思路 减少 JOIN 数量 数据冗余:添加必要的冗余字段(如订单表直接存储用户名)合并表:将频繁关联的小表合并成…...
【LeetCode】算法详解#6 ---除自身以外数组的乘积
1.题目介绍 给定一个整数数组 nums,返回 数组 answer ,其中 answer[i] 等于 nums 中除 nums[i] 之外其余各元素的乘积 。 题目数据 保证 数组 nums之中任意元素的全部前缀元素和后缀的乘积都在 32 位 整数范围内。 请 不要使用除法,且在 O…...
Cilium动手实验室: 精通之旅---13.Cilium LoadBalancer IPAM and L2 Service Announcement
Cilium动手实验室: 精通之旅---13.Cilium LoadBalancer IPAM and L2 Service Announcement 1. LAB环境2. L2公告策略2.1 部署Death Star2.2 访问服务2.3 部署L2公告策略2.4 服务宣告 3. 可视化 ARP 流量3.1 部署新服务3.2 准备可视化3.3 再次请求 4. 自动IPAM4.1 IPAM Pool4.2 …...