stm32四足机器人(标准库)
项目技术要求
PWM波形的学习
参考文章stm32 TIM输出比较(PWM驱动LED呼吸灯&&PWM驱动舵机&&PWM驱动直流电机)_ttl pwm 驱动激光头区别-CSDN博客
舵机的学习
参考文章
stm32 TIM输出比较(PWM驱动LED呼吸灯&&PWM驱动舵机&&PWM驱动直流电机)_ttl pwm 驱动激光头区别-CSDN博客
蓝牙的学习
参考文章
stm32 USART串口(串口发送&串口发送+接收)_stm32串口实现接收和发送-CSDN博客
项目材料
降压模块+2节14500 3.7v电池+芯片拓展版+HC-06蓝牙模块+stm32f103c8t6+8个舵机+3D打印机器人骨架
项目结构图

技术问题
PWM初始化
(1)是否可以同时开启多个TIM时钟
1.独立配置:你可以对多个定时器(如 TIM2、TIM3、TIM4 等)分别调用 TIM_InternalClockConfig() 函数,例如:
TIM_InternalClockConfig(TIM2);
TIM_InternalClockConfig(TIM3);2.相互独立:每个定时器都是独立工作的,因此可以同时开启多个定时器的内部时钟配置。每个定时器的状态和配置不会互相干扰。
3.资源限制:需要注意的是,虽然可以同时开启多个定时器,但要确保你的 MCU 有足够的资源(如定时器数量、计数器和中断处理能力等)。
4.使用场景:在某些应用场景中,你可能会用到多个定时器来实现不同的功能,比如定时器1用于PWM输出,定时器2用于延时,定时器3用于事件计数等。
5.总结:可以同时开启多个定时器的内部时钟配置,只需确保每个定时器都被正确初始化和配置即可。
(2)TIM使能问题
使用定时器(TIM)时,确保其正确使能是非常重要的。确保正确配置和使能 TIM 是保证 STM32 定时器正常工作的关键。
(3)捕获通道的正确开启
由于本项目需要开启所有的捕获通道,要保证所有的通道的开启
输入捕获通道CCR的正确的写入
(4)四足机器人步态

代码书写
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Servo.h"
#include "Serial.h"
uint8_t RxData;
uint8_t Middle;
float Angle;
const uint16_t RunAdvance[6][8]={{110,150,100,40,130,40,50,50},{45,100,100,40,130,40,50,50},{130,150,160,40,110,40,70,50},
{60,150,140,40,70,40,100,50},{60,150,140,40,120,80,100,50},{80,150,170,40,80,0,50,50}};
const uint8_t StartStates[]={60,145,140,30,100,40,70,60};
const uint16_t HelloStates[2][8]={{60,60,140,20,130,30,70,40},{60,130,140,20,130,30,70,40}};
const uint16_t HapplyStates[2][8]={{60,90,140,80,100,80,70,10},{110,90,90,80,70,80,100,10}};
int main(void)
{ Servo_Init_Right();Servo_Init_Left();Serial_Init(); while (1){if (Serial_GetRxFlag() == 1) //检查串口接收数据的标志位{RxData = Serial_GetRxData(); //获取串口接收的数据Serial_SendByte(RxData);if(RxData==0x34){for(int i=0;i<6;i++){Servo_SetAngle1_Left(RunAdvance[i][0]); Servo_SetAngle2_Left(RunAdvance[i][1]);Servo_SetAngle3_Left(RunAdvance[i][2]);Servo_SetAngle4_Left(RunAdvance[i][3]);Servo_SetAngle1_Right(RunAdvance[i][4]);Servo_SetAngle2_Right(RunAdvance[i][5]);Servo_SetAngle3_Right(RunAdvance[i][6]);Servo_SetAngle4_Right(RunAdvance[i][7]);Delay_ms(250);}}if(RxData==0x35){Servo_SetAngle1_Left(StartStates[0]); Servo_SetAngle2_Left(StartStates[1]);Servo_SetAngle3_Left(StartStates[2]);Servo_SetAngle4_Left(StartStates[3]);Servo_SetAngle1_Right(StartStates[4]);Servo_SetAngle2_Right(StartStates[5]);Servo_SetAngle3_Right(StartStates[6]);Servo_SetAngle4_Right(StartStates[7]);}if(RxData==0x36){for(int i=0;i<2;i++){Servo_SetAngle1_Left(HelloStates[i][0]); Servo_SetAngle2_Left(HelloStates[i][1]);Servo_SetAngle3_Left(HelloStates[i][2]);Servo_SetAngle4_Left(HelloStates[i][3]);Servo_SetAngle1_Right(HelloStates[i][4]);Servo_SetAngle2_Right(HelloStates[i][5]);Servo_SetAngle3_Right(HelloStates[i][6]);Servo_SetAngle4_Right(HelloStates[i][7]);Delay_ms(250);}}if(RxData==0x37){for(int i=0;i<2;i++){Servo_SetAngle1_Left(HapplyStates[i][0]); Servo_SetAngle2_Left(HapplyStates[i][1]);Servo_SetAngle3_Left(HapplyStates[i][2]);Servo_SetAngle4_Left(HapplyStates[i][3]);Servo_SetAngle1_Right(HapplyStates[i][4]);Servo_SetAngle2_Right(HapplyStates[i][5]);Servo_SetAngle3_Right(HapplyStates[i][6]);Servo_SetAngle4_Right(HapplyStates[i][7]);Delay_ms(250);}}}}
}PWM
PWM.c
#include "stm32f10x.h" // Device headervoid PWM_Init_Left(void)
{/*开启时钟*/RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //开启TIM2的时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟/*GPIO初始化*/GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1 |GPIO_Pin_0|GPIO_Pin_2 |GPIO_Pin_3;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA1引脚初始化为复用推挽输出 //受外设控制的引脚,均需要配置为复用模式/*配置时钟源*/TIM_InternalClockConfig(TIM2); //选择TIM2为内部时钟,若不调用此函数,TIM默认也为内部时钟/*时基单元初始化*/TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; //定义结构体变量TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //时钟分频,选择不分频,此参数用于配置滤波器时钟,不影响时基单元功能TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //计数器模式,选择向上计数TIM_TimeBaseInitStructure.TIM_Period = 20000 - 1; //计数周期,即ARR的值TIM_TimeBaseInitStructure.TIM_Prescaler = 72 - 1; //预分频器,即PSC的值TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; //重复计数器,高级定时器才会用到TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure); //将结构体变量交给TIM_TimeBaseInit,配置TIM2的时基单元TIM_OCInitTypeDef TIM_OCInitStructure; //定义结构体变量TIM_OCStructInit(&TIM_OCInitStructure); //结构体初始化,若结构体没有完整赋值//则最好执行此函数,给结构体所有成员都赋一个默认值//避免结构体初值不确定的问题TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //输出比较模式,选择PWM模式1TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性,选择为高,若选择极性为低,则输出高低电平取反TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //输出使能TIM_OCInitStructure.TIM_Pulse = 0; //初始的CCR值TIM_OC1Init(TIM2, &TIM_OCInitStructure);TIM_OC2Init(TIM2, &TIM_OCInitStructure);TIM_OC3Init(TIM2, &TIM_OCInitStructure);TIM_OC4Init(TIM2, &TIM_OCInitStructure);TIM_Cmd(TIM2, ENABLE);}void PWM_Init_Right(void)
{RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 |GPIO_Pin_7;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);GPIO_InitTypeDef GPIO_InitStruct;GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0 |GPIO_Pin_1;GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStruct);TIM_InternalClockConfig(TIM3);TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; //定义结构体变量TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //时钟分频,选择不分频,此参数用于配置滤波器时钟,不影响时基单元功能TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //计数器模式,选择向上计数TIM_TimeBaseInitStructure.TIM_Period = 20000 - 1; //计数周期,即ARR的值TIM_TimeBaseInitStructure.TIM_Prescaler = 72 - 1; //预分频器,即PSC的值TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; //重复计数器,高级定时器才会用到TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStructure);TIM_OCInitTypeDef TIM_OCInitStructure; TIM_OCStructInit(&TIM_OCInitStructure); TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //输出比较模式,选择PWM模式1TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性,选择为高,若选择极性为低,则输出高低电平取反TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //输出使能TIM_OCInitStructure.TIM_Pulse = 0; //初始的CCR值TIM_OC1Init(TIM3, &TIM_OCInitStructure);TIM_OC2Init(TIM3, &TIM_OCInitStructure);TIM_OC3Init(TIM3, &TIM_OCInitStructure);TIM_OC4Init(TIM3, &TIM_OCInitStructure);TIM_Cmd(TIM3, ENABLE);}void PWM_SetCompare2_Left(uint16_t Compare)
{TIM_SetCompare2(TIM2, Compare); //设置CCR2的值
}
void PWM_SetCompare1_Left(uint16_t Compare)
{TIM_SetCompare1(TIM2, Compare); //设置CCR1的值
}
void PWM_SetCompare3_Left(uint16_t Compare)
{TIM_SetCompare3(TIM2, Compare); //设置CCR1的值
}
void PWM_SetCompare4_Left(uint16_t Compare)
{TIM_SetCompare4(TIM2, Compare); //设置CCR1的值
}void PWM_SetCompare2_Right(uint16_t Compare)
{TIM_SetCompare2(TIM3, Compare); //设置CCR2的值
}
void PWM_SetCompare1_Right(uint16_t Compare)
{TIM_SetCompare1(TIM3, Compare); //设置CCR1的值
}
void PWM_SetCompare3_Right(uint16_t Compare)
{TIM_SetCompare3(TIM3, Compare); //设置CCR1的值
}
void PWM_SetCompare4_Right(uint16_t Compare)
{TIM_SetCompare4(TIM3, Compare); //设置CCR1的值
}PWM.h
#ifndef __PWM_H
#define __PWM_Hvoid PWM_Init_Left(void);
void PWM_Init_Right(void);
void PWM_SetCompare2_Left(uint16_t Compare);
void PWM_SetCompare1_Left(uint16_t Compare);
void PWM_SetCompare3_Left(uint16_t Compare);
void PWM_SetCompare4_Left(uint16_t Compare);void PWM_SetCompare2_Right(uint16_t Compare);
void PWM_SetCompare1_Right(uint16_t Compare);
void PWM_SetCompare3_Right(uint16_t Compare);
void PWM_SetCompare4_Right(uint16_t Compare);#endif
Servo
Servo.h
#ifndef __SERVO_H
#define __SERVO_Hvoid Servo_Init_Left(void);
void Servo_Init_Right(void);
void Servo_SetAngle1_Left(float Angle);
void Servo_SetAngle2_Left(float Angle);
void Servo_SetAngle3_Left(float Angle);
void Servo_SetAngle4_Left(float Angle);void Servo_SetAngle1_Right(float Angle);
void Servo_SetAngle2_Right(float Angle);
void Servo_SetAngle3_Right(float Angle);
void Servo_SetAngle4_Right(float Angle);#endifServo.c
#include "stm32f10x.h" // Device header
#include "PWM.h"/*** 函 数:舵机初始化* 参 数:无* 返 回 值:无*/
void Servo_Init_Left(void)
{PWM_Init_Left(); //初始化舵机的底层PWM}
void Servo_Init_Right(void)
{PWM_Init_Right(); //初始化舵机的底层PWM}void Servo_SetAngle2_Left(float Angle)
{PWM_SetCompare2_Left(Angle / 180 * 2000 + 500); //设置占空比//将角度线性变换,对应到舵机要求的占空比范围上
}void Servo_SetAngle1_Left(float Angle)
{PWM_SetCompare1_Left(Angle / 180 * 2000 + 500); //设置占空比//将角度线性变换,对应到舵机要求的占空比范围上
}
void Servo_SetAngle3_Left(float Angle)
{PWM_SetCompare3_Left(Angle / 180 * 2000 + 500); //设置占空比//将角度线性变换,对应到舵机要求的占空比范围上
}
void Servo_SetAngle4_Left(float Angle)
{PWM_SetCompare4_Left(Angle / 180 * 2000 + 500); //设置占空比//将角度线性变换,对应到舵机要求的占空比范围上
}void Servo_SetAngle2_Right(float Angle)
{PWM_SetCompare2_Right(Angle / 180 * 2000 + 500); //设置占空比//将角度线性变换,对应到舵机要求的占空比范围上
}void Servo_SetAngle1_Right(float Angle)
{PWM_SetCompare1_Right(Angle / 180 * 2000 + 500); //设置占空比//将角度线性变换,对应到舵机要求的占空比范围上
}
void Servo_SetAngle3_Right(float Angle)
{PWM_SetCompare3_Right(Angle / 180 * 2000 + 500); //设置占空比//将角度线性变换,对应到舵机要求的占空比范围上
}
void Servo_SetAngle4_Right(float Angle)
{PWM_SetCompare4_Right(Angle / 180 * 2000 + 500); //设置占空比//将角度线性变换,对应到舵机要求的占空比范围上
}Serial
Serial.c
#include "stm32f10x.h" // Device header
#include <stdio.h>
#include <stdarg.h>
#include "Timer.h"uint8_t Serial_RxData; //定义串口接收的数据变量
uint8_t Serial_RxFlag; //定义串口接收的标志位变量
/*** 函 数:串口初始化* 参 数:无* 返 回 值:无*/
void Serial_Init(void)
{/*开启时钟*/RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE); //开启USART1的时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟/*GPIO初始化*/GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA9引脚初始化为复用推挽输出GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA10引脚初始化为上拉输入/*USART初始化*/USART_InitTypeDef USART_InitStructure; //定义结构体变量USART_InitStructure.USART_BaudRate = 9600; //波特率USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //硬件流控制,不需要USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx; //模式,发送模式和接收模式均选择USART_InitStructure.USART_Parity = USART_Parity_No; //奇偶校验,不需要USART_InitStructure.USART_StopBits = USART_StopBits_1; //停止位,选择1位USART_InitStructure.USART_WordLength = USART_WordLength_8b; //字长,选择8位USART_Init(USART1, &USART_InitStructure); //将结构体变量交给USART_Init,配置USART1/*中断输出配置*/USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); //开启串口接收数据的中断/*NVIC中断分组*/NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //配置NVIC为分组2/*NVIC配置*/NVIC_InitTypeDef NVIC_InitStructure; //定义结构体变量NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn; //选择配置NVIC的USART1线NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //指定NVIC线路使能NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; //指定NVIC线路的抢占优先级为1NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2; //指定NVIC线路的响应优先级为1NVIC_Init(&NVIC_InitStructure); //将结构体变量交给NVIC_Init,配置NVIC外设/*USART使能*/USART_Cmd(USART1, ENABLE); //使能USART1,串口开始运行
}/*** 函 数:串口发送一个字节* 参 数:Byte 要发送的一个字节* 返 回 值:无*/
void Serial_SendByte(uint8_t Byte)
{USART_SendData(USART1, Byte); //将字节数据写入数据寄存器,写入后USART自动生成时序波形while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET); //等待发送完成/*下次写入数据寄存器会自动清除发送完成标志位,故此循环后,无需清除标志位*/
}/*** 函 数:串口发送一个数组* 参 数:Array 要发送数组的首地址* 参 数:Length 要发送数组的长度* 返 回 值:无*/
void Serial_SendArray(uint8_t *Array, uint16_t Length)
{uint16_t i;for (i = 0; i < Length; i ++) //遍历数组{Serial_SendByte(Array[i]); //依次调用Serial_SendByte发送每个字节数据}
}/*** 函 数:串口发送一个字符串* 参 数:String 要发送字符串的首地址* 返 回 值:无*/
void Serial_SendString(char *String)
{uint8_t i;for (i = 0; String[i] != '\0'; i ++)//遍历字符数组(字符串),遇到字符串结束标志位后停止{Serial_SendByte(String[i]); //依次调用Serial_SendByte发送每个字节数据}
}/*** 函 数:次方函数(内部使用)* 返 回 值:返回值等于X的Y次方*/
uint32_t Serial_Pow(uint32_t X, uint32_t Y)
{uint32_t Result = 1; //设置结果初值为1while (Y --) //执行Y次{Result *= X; //将X累乘到结果}return Result;
}/*** 函 数:串口发送数字* 参 数:Number 要发送的数字,范围:0~4294967295* 参 数:Length 要发送数字的长度,范围:0~10* 返 回 值:无*/
void Serial_SendNumber(uint32_t Number, uint8_t Length)
{uint8_t i;for (i = 0; i < Length; i ++) //根据数字长度遍历数字的每一位{Serial_SendByte(Number / Serial_Pow(10, Length - i - 1) % 10 + '0'); //依次调用Serial_SendByte发送每位数字}
}/*** 函 数:使用printf需要重定向的底层函数* 参 数:保持原始格式即可,无需变动* 返 回 值:保持原始格式即可,无需变动*/
int fputc(int ch, FILE *f)
{Serial_SendByte(ch); //将printf的底层重定向到自己的发送字节函数return ch;
}/*** 函 数:自己封装的prinf函数* 参 数:format 格式化字符串* 参 数:... 可变的参数列表* 返 回 值:无*/
void Serial_Printf(char *format, ...)
{char String[100]; //定义字符数组va_list arg; //定义可变参数列表数据类型的变量argva_start(arg, format); //从format开始,接收参数列表到arg变量vsprintf(String, format, arg); //使用vsprintf打印格式化字符串和参数列表到字符数组中va_end(arg); //结束变量argSerial_SendString(String); //串口发送字符数组(字符串)
}/*** 函 数:获取串口接收标志位* 参 数:无* 返 回 值:串口接收标志位,范围:0~1,接收到数据后,标志位置1,读取后标志位自动清零*/
uint8_t Serial_GetRxFlag(void)
{if (Serial_RxFlag == 1) //如果标志位为1{Serial_RxFlag = 0;return 1; //则返回1,并自动清零标志位}return 0; //如果标志位为0,则返回0
}/*** 函 数:获取串口接收的数据* 参 数:无* 返 回 值:接收的数据,范围:0~255*/
uint8_t Serial_GetRxData(void)
{return Serial_RxData; //返回接收的数据变量
}/*** 函 数:USART1中断函数* 参 数:无* 返 回 值:无* 注意事项:此函数为中断函数,无需调用,中断触发后自动执行* 函数名为预留的指定名称,可以从启动文件复制* 请确保函数名正确,不能有任何差异,否则中断函数将不能进入*/
void USART1_IRQHandler(void)
{if (USART_GetITStatus(USART1, USART_IT_RXNE) == SET) //判断是否是USART1的接收事件触发的中断{Serial_RxData = USART_ReceiveData(USART1); //读取数据寄存器,存放在接收的数据变量Serial_RxFlag = 1; //置接收标志位变量为1USART_ClearITPendingBit(USART1, USART_IT_RXNE); //清除USART1的RXNE标志位//读取数据寄存器会自动清除此标志位//如果已经读取了数据寄存器,也可以不执行此代码}
}Serial.h
#ifndef __SERIAL_H
#define __SERIAL_H#include <stdio.h>void Serial_Init(void);
void Serial_SendByte(uint8_t Byte);
void Serial_SendArray(uint8_t *Array, uint16_t Length);
void Serial_SendString(char *String);
void Serial_SendNumber(uint32_t Number, uint8_t Length);
void Serial_Printf(char *format, ...);uint8_t Serial_GetRxFlag(void);
uint8_t Serial_GetRxData(void);#endif项目不足
没有写掉头逻辑,四足机器人走路存在一点问题,有时间就改进。


相关文章:
stm32四足机器人(标准库)
项目技术要求 PWM波形的学习 参考文章stm32 TIM输出比较(PWM驱动LED呼吸灯&&PWM驱动舵机&&PWM驱动直流电机)_ttl pwm 驱动激光头区别-CSDN博客 舵机的学习 参考文章 stm32 TIM输出比较(PWM驱动LED呼吸灯&&PWM驱动舵机&&PWM驱动直流电机)…...

基于Hive和Hadoop的共享单车分析系统
本项目是一个基于大数据技术的共享单车分析系统,旨在为用户提供全面的单车使用信息和深入的出行行为分析。系统采用 Hadoop 平台进行大规模数据存储和处理,利用 MapReduce 进行数据分析和处理,通过 Sqoop 实现数据的导入导出,以 S…...

基于SSM和vue的机票订购管理系统
👉文末查看项目功能视频演示获取源码sql脚本视频导入教程视频 1 、功能描述 基于SSM和vue的机票订购管理系统2拥有两种角色 管理员:用户管理、机票管理、订票管理、公告管理、广告管理、系统管理、添加机票等 用户:登录注册、订票、查看公…...

【rCore OS 开源操作系统】Rust 练习题题解: Enums
【rCore OS 开源操作系统】Rust 练习题题解: Enums 摘要 rCore OS 开源操作系统训练营学习中的代码练习部分。 在此记录下自己学习过程中的产物,以便于日后更有“收获感”。 后续还会继续完成其他章节的练习题题解。 正文 enums1 题目 // enums1.rs // // No hi…...

VPN简述
文章目录 VPNVPN基础VPN类型 VPN VPN隧道安全 VPN基础 背景: 在网络传输中,绝大部分数据内容都是明文传输,存在很多安全隐患(窃听、篡改、冒充) 总部、分公司、办事处、出差人员、合作单位等需要访问总部网络资源 Vi…...
)
【Kubernetes】常见面试题汇总(四十九)
目录 110.假设一家公司希望通过采用新技术来优化其工作负载的分配。公司如何有效地实现这种资源分配? 111.考虑一家拼车公司希望通过同时扩展其平台来增加服务器数量。您认为公司将如何处理服务器及其安装? 特别说明: 题目 1-68 属于【…...

常见排序算法以及冒泡排序的基础使用方法
众所周知,冒泡排序是编程中最经典也是最简单的一种排序方法,它是通过重复访问对两个相邻的值进行比较,由于在互换的过程中,最大 (或最小) 的那个值会慢慢的交换到顶部,像汽水一样,故名“冒泡排序”。 let a…...
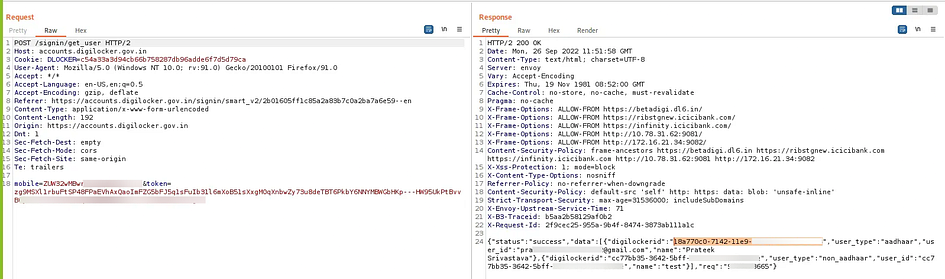
【网络安全】Cookie与ID未强绑定导致账户接管
未经许可,不得转载。 文章目录 前言正文前言 DigiLocker 是一项在线服务,旨在为公民提供一个安全的数字平台,用于存储和访问重要的文档,如 Aadhaar 卡、PAN 卡和成绩单等。DigiLocker 通过多因素身份验证(MFA)来保护用户账户安全,通常包括 6 位数的安全 PIN 和一次性密…...

Ansible Playbook原理与实践(Principles and Practice of Ansible Playbook)
💝💝💝欢迎来到我的博客,很高兴能够在这里和您见面!希望您在这里可以感受到一份轻松愉快的氛围,不仅可以获得有趣的内容和知识,也可以畅所欲言、分享您的想法和见解。 本人主要分享计算机核心技…...

解决OpenCV保存视频 视频全部为绿色的bug
目录 项目场景: 问题描述 原因分析: 解决方案: 项目场景: 使用OpenCV-Python 保存视频,视频为numpy array格式,保存的视频全部为无意义的绿色。 问题描述 用opencv 保存的视频会出现全部为绿色的情况&…...

手机使用指南:如何在没有备份的情况下从 Android 设备恢复已删除的联系人
在本指南中,您将了解如何从 Android 手机内存中恢复已删除的联系人。Android 诞生、见证并征服了 80% 的智能手机行业。有些人可能将此称为“非常大胆的宣言”,但最近的统计数据完全支持我们的说法。灵活性、高度改进的可用性和快速性是 Android 操作系统…...
:函数)
TS系列(6):函数
你好,我是沐爸,欢迎点赞、收藏、评论和关注。 TS系列(1):TS是什么?如何使用? TS系列(2):类型声明、类型推断和类型总览 TS系列(3)&…...
网盘能否作为FTP替代产品?企业该如何进行FTP国产化替代?
近年来,信创的概念引入和高效实践落地让更多的行业企业自发性地进行国产化替代,目前信创国产化替代还多发生在操作系统和应用层面,软件工具等目前还在下一阶段规划,但很多企业未雨绸缪,已经在做调研和尝试。 FTP作为世…...

Python操作MongoDB
一、Python链接MongoDB 1、安装pymongo包 使用包管理器安装 pip3 insatll pymongo 2、连接MongoDB 首先需要导入pymongo包: from pymongo import MongoClient 创建MongoClient对象: from pymongo import MongoClient #创建MongoClient对象&#…...

Redis --- 第二讲 --- 特性和安装
一、背景知识 Redis特性: Redis是一个在内存中存储数据的中间件,用于作为数据库,作为缓存,在分布式系统中能够大展拳脚。Redis的一些特性造就了现在的Redis。 在内存中存储数据,通过一系列的数据结构。MySQL主要是通…...

基于单片机的两轮直立平衡车的设计
本设计基于单片机设计的两轮自平衡小车,其中机械部分包括车体、车轮、直流电机、锂电池等部件。控制电路板采用STC12C5A60S2作为主控制器,采用6轴姿态传感器MPU6050测量小车倾角,采用TB6612FNG芯片驱动电机。通过模块化编程完成了平衡车系统软…...

828华为云征文|部署个人知识管理系统 SiyuanNote
828华为云征文|部署个人知识管理系统 SiyuanNote 一、Flexus云服务器X实例介绍二、Flexus云服务器X实例配置2.1 重置密码2.2 服务器连接2.3 安全组配置2.4 Docker 环境搭建 三、Flexus云服务器X实例部署 SiyuanNote3.1 SiyuanNote 介绍3.2 SiyuanNote 部署3.3 Siyua…...

MATLAB中pcg函数用法
目录 语法 说明 示例 线性系统的迭代解 使用指定了预条件子的 pcg 提供初始估计值 使用函数句柄代替数值矩阵 pcg函数的功能是求解线性系统 - 预条件共轭梯度法。 语法 x pcg(A,b) x pcg(A,b,tol) x pcg(A,b,tol,maxit) x pcg(A,b,tol,maxit,M) x pcg(A,b,tol,ma…...

Veritus netbackup 管理控制台无法连接:未知错误
节假日停电,netbackup服务器意外停机后重新开机,使用netbackup管理控制台无法连接,提示未知错误。 ssh连接到服务器,操作系统正常,那应该是应用有问题,先试一下重启服务器看看。重新正常关机,重…...

安全中心 (SOC) 与 网络运营中心 (NOC)
NOC 和 SOC 之间的区别 网络运营中心 (NOC) 负责维护公司计算机系统的技术基础设施,而安全运营中心 (SOC) 则负责保护组织免受网络威胁。 NOC 专注于防止自然灾害、停电和互联网中断等自然原因造成的网络干扰,而 SOC 则从事监控、管理和保护。 NOC 提…...

基于大模型的 UI 自动化系统
基于大模型的 UI 自动化系统 下面是一个完整的 Python 系统,利用大模型实现智能 UI 自动化,结合计算机视觉和自然语言处理技术,实现"看屏操作"的能力。 系统架构设计 #mermaid-svg-2gn2GRvh5WCP2ktF {font-family:"trebuchet ms",verdana,arial,sans-…...
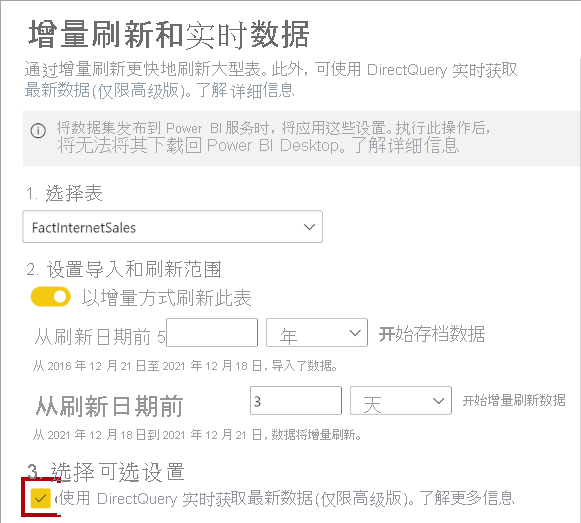
微软PowerBI考试 PL300-选择 Power BI 模型框架【附练习数据】
微软PowerBI考试 PL300-选择 Power BI 模型框架 20 多年来,Microsoft 持续对企业商业智能 (BI) 进行大量投资。 Azure Analysis Services (AAS) 和 SQL Server Analysis Services (SSAS) 基于无数企业使用的成熟的 BI 数据建模技术。 同样的技术也是 Power BI 数据…...
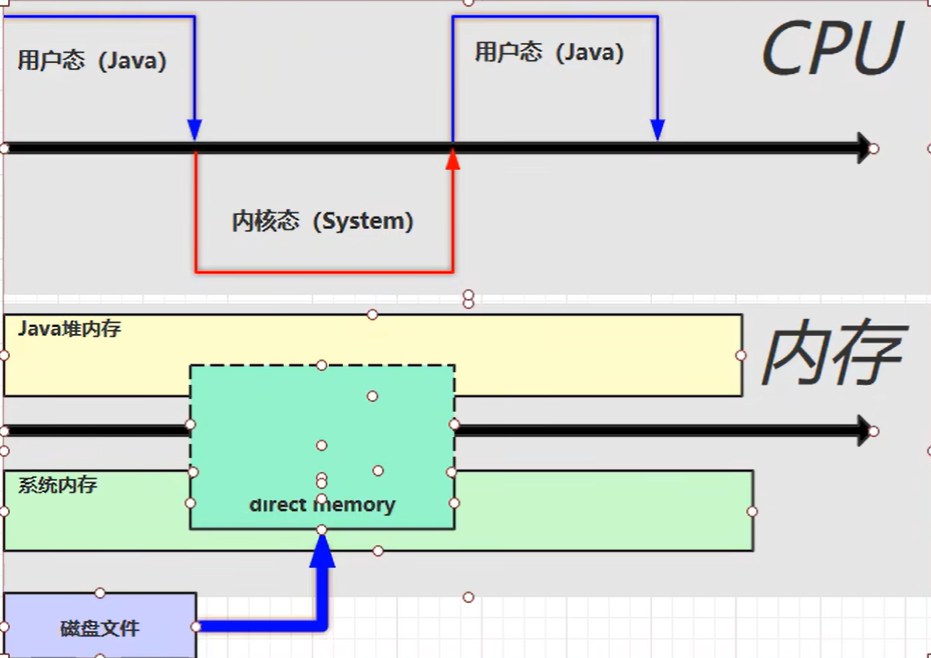
【JVM】- 内存结构
引言 JVM:Java Virtual Machine 定义:Java虚拟机,Java二进制字节码的运行环境好处: 一次编写,到处运行自动内存管理,垃圾回收的功能数组下标越界检查(会抛异常,不会覆盖到其他代码…...

将对透视变换后的图像使用Otsu进行阈值化,来分离黑色和白色像素。这句话中的Otsu是什么意思?
Otsu 是一种自动阈值化方法,用于将图像分割为前景和背景。它通过最小化图像的类内方差或等价地最大化类间方差来选择最佳阈值。这种方法特别适用于图像的二值化处理,能够自动确定一个阈值,将图像中的像素分为黑色和白色两类。 Otsu 方法的原…...
)
【RockeMQ】第2节|RocketMQ快速实战以及核⼼概念详解(二)
升级Dledger高可用集群 一、主从架构的不足与Dledger的定位 主从架构缺陷 数据备份依赖Slave节点,但无自动故障转移能力,Master宕机后需人工切换,期间消息可能无法读取。Slave仅存储数据,无法主动升级为Master响应请求ÿ…...
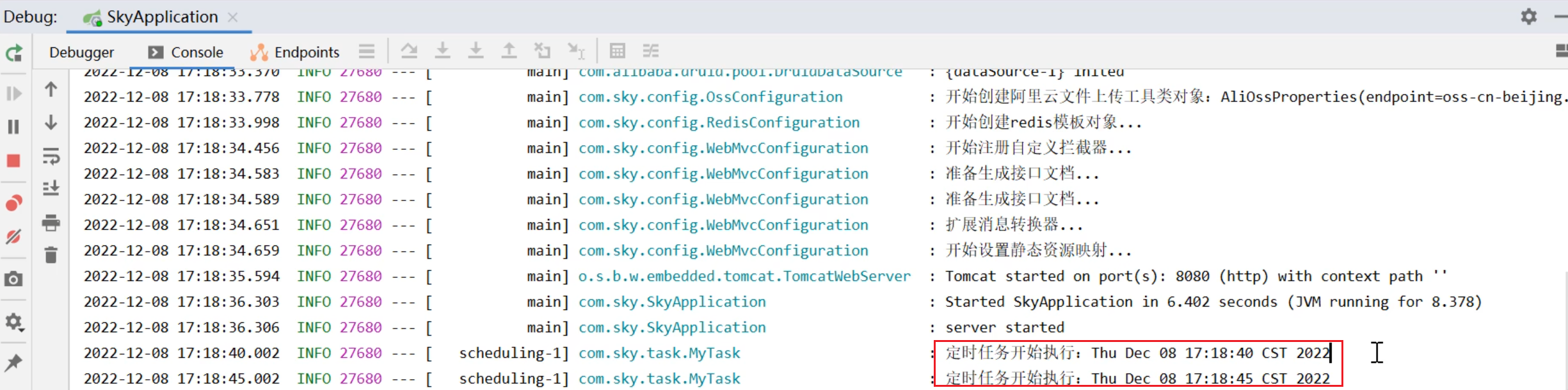
SpringTask-03.入门案例
一.入门案例 启动类: package com.sky;import lombok.extern.slf4j.Slf4j; import org.springframework.boot.SpringApplication; import org.springframework.boot.autoconfigure.SpringBootApplication; import org.springframework.cache.annotation.EnableCach…...
企业如何增强终端安全?
在数字化转型加速的今天,企业的业务运行越来越依赖于终端设备。从员工的笔记本电脑、智能手机,到工厂里的物联网设备、智能传感器,这些终端构成了企业与外部世界连接的 “神经末梢”。然而,随着远程办公的常态化和设备接入的爆炸式…...
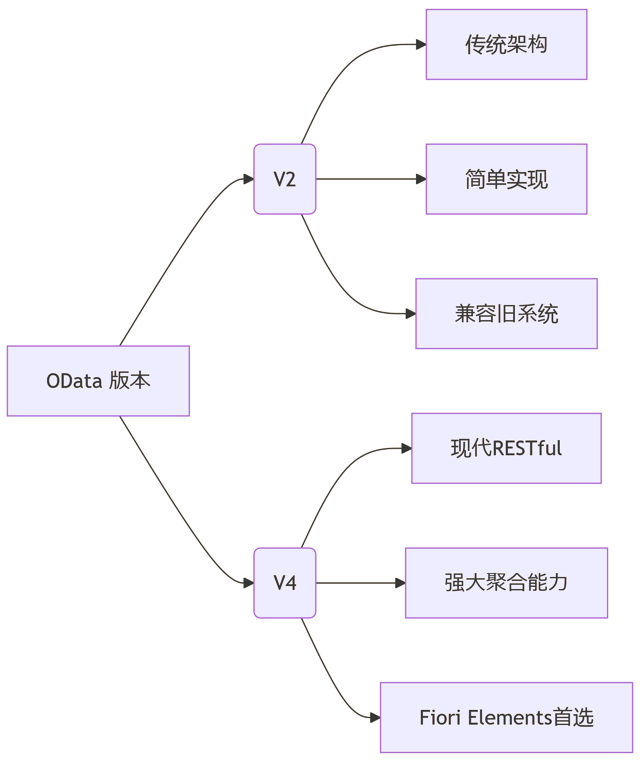
SAP学习笔记 - 开发26 - 前端Fiori开发 OData V2 和 V4 的差异 (Deepseek整理)
上一章用到了V2 的概念,其实 Fiori当中还有 V4,咱们这一章来总结一下 V2 和 V4。 SAP学习笔记 - 开发25 - 前端Fiori开发 Remote OData Service(使用远端Odata服务),代理中间件(ui5-middleware-simpleproxy)-CSDN博客…...

【Java学习笔记】BigInteger 和 BigDecimal 类
BigInteger 和 BigDecimal 类 二者共有的常见方法 方法功能add加subtract减multiply乘divide除 注意点:传参类型必须是类对象 一、BigInteger 1. 作用:适合保存比较大的整型数 2. 使用说明 创建BigInteger对象 传入字符串 3. 代码示例 import j…...

A2A JS SDK 完整教程:快速入门指南
目录 什么是 A2A JS SDK?A2A JS 安装与设置A2A JS 核心概念创建你的第一个 A2A JS 代理A2A JS 服务端开发A2A JS 客户端使用A2A JS 高级特性A2A JS 最佳实践A2A JS 故障排除 什么是 A2A JS SDK? A2A JS SDK 是一个专为 JavaScript/TypeScript 开发者设计的强大库ÿ…...