OpenCV C++霍夫圆查找
OpenCV 中的霍夫圆检测基于 霍夫变换 (Hough Transform),它是一种从边缘图像中识别几何形状的算法。霍夫圆检测是专门用于检测图像中的圆形形状的。它通过将图像中的每个像素映射到可能的圆参数空间,来确定哪些像素符合圆形状。
1. 霍夫变换的原理
霍夫变换的基本思想是将图像空间中的点映射到一个参数空间,在这个参数空间中可以检测特定的几何形状(如直线、圆等)。对于圆形,霍夫变换的目标是找到符合圆方程的像素。
圆的方程
在二维平面上,圆可以由以下方程描述:
其中:
- (a, b) 是圆心坐标;
- r 是圆的半径;
- (x, y) 是圆周上的一个点。

2. 霍夫圆检测的步骤
2.1 边缘检测
- 在进行霍夫变换之前,首先对图像执行边缘检测,通常使用 Canny 边缘检测器。边缘检测的目的是找到图像中的边缘像素,因为这些像素更有可能属于圆周。
2.2 参数空间的投票
-
每一个在边缘图像中的像素点 (x, y),它可能属于多个不同圆的边界,因此需要通过以下步骤将其投票映射到参数空间:
- 将每个边缘像素映射为一组可能的圆心 (a, b),这些圆心位于距离该像素 r 的位置。通过改变半径 r ,该像素 (x, y) 将投票给不同半径下的多个圆心。
- 对于每个可能的半径 r ,根据圆方程:
其中 θ 是不同的角度值(从 0 到 360 度),遍历这些角度得到可能的圆心 (a, b)。
-
每个像素点对不同半径 r 和不同圆心 (a, b) 进行投票,记录这些投票结果。
2.3 累加器
- 在参数空间 (a, b, r) 中有一个累加器,用来统计哪些 (a, b, r) 的组合收到了最多的投票。最多投票的点表示在边缘图像中最可能的圆心和半径。
- 累加器的最大值对应的是检测到的圆。
2.4 圆的确定
- 最后,累加器中投票结果最多的那些 (a, b, r) 组合将被认为是图像中检测到的圆形。霍夫圆检测可以输出这些圆的圆心坐标 (a, b) 以及半径 r。
3. OpenCV 中霍夫圆检测的实现
OpenCV 中使用 HoughCircles() 函数来进行霍夫圆检测,其主要参数包括:
image:输入的边缘检测图像(通常是经过边缘检测或灰度化的图像)。method:霍夫变换的检测方法,通常为HOUGH_GRADIENT,这是经典的霍夫圆检测方法。dp:累加器分辨率的倒数。dp=1表示累加器的分辨率与输入图像相同;dp=2表示累加器分辨率是输入图像的一半。minDist:检测到的圆之间的最小距离,防止检测到多个重叠的圆。param1:用于边缘检测的 Canny 边缘检测的阈值。param2:累加器的阈值,值越高检测到的圆越少,越准确。minRadius和maxRadius:定义圆的最小和最大半径范围。
#include <opencv2/opencv.hpp>
//#include "quickopencv.h"
#include <iostream>
#include <math.h>
#include <opencv2/imgproc.hpp>
#include <vector>using namespace cv;
using namespace std;int main(int argc, char** argv) {Mat img = imread("path_to_img.jpg");//QuickDemo qd;//qd.hough_circle(img);resize(img, img, Size(img.cols, img.rows), 0, 0, INTER_LINEAR);imshow("img", img);if (img.empty()) {cout << "请确认图像文件名称是否正确" << endl;return -1;}Mat gary;//将图像转换为灰度图cvtColor(img, gary, COLOR_BGR2GRAY);//高斯模糊//GaussianBlur(输入图像,输出图像,高斯核,X轴上的标准差,Y轴上的标准差);GaussianBlur(gary, gary, Size(9, 9), 2, 2);// 转换为二值图/*Mat binary;threshold(img, binary, 100, 255, cv::THRESH_BINARY);imshow("binary", binary);*///检测圆形vector<Vec3f> circles;double dp = 1; //累加器分辨率与图像分辨率的反比,如果dp=1,则累加器具有与输入图像相同的分辨率。如果dp=2,累加器的宽度和高度都是原来的一半。double minDist = 10; //两个圆心的最小距离double param1 = 40; //Canny边缘检测的较大阈值double param2 = 40; //累加器阈值int min_radius = 1; //圆形半径最小值int max_radius = 50; //圆形半径最大值HoughCircles(gary, circles, HOUGH_GRADIENT, dp, minDist, param1, param2, min_radius, max_radius);//在图像中标记出圆形for (size_t i = 0; i < circles.size(); i++) {//读取圆心Point center(cvRound(circles[i][0]), cvRound(circles[i][1]));//读取半径int radius = cvRound(circles[i][2]);//绘制圆心circle(img, center, 3, Scalar(0, 255, 0), -1, 8, 0);// 设置圆心坐标的文本std::string centerText = "(" + std::to_string(center.x) + "," + std::to_string(center.y) + ")";// 计算文本框的大小cv::Size textSize = cv::getTextSize(centerText, cv::FONT_HERSHEY_SIMPLEX, 0.5, 1, nullptr);// 计算文本框的左下角位置,使其在圆心附近cv::Point textOrg((center.x - textSize.width / 2), (center.y + textSize.height / 2));// 在圆心处绘制文本cv::putText(img, centerText, textOrg, cv::FONT_HERSHEY_SIMPLEX, 0.5, cv::Scalar(255, 255, 255), 1);//绘制圆circle(img, center, radius, Scala4. 霍夫圆检测的应用场景
霍夫圆检测广泛应用于多个场景,包括但不限于:
- 车轮、硬币等圆形物体检测;
- 医学图像中细胞、眼球、病变区域的圆形检测;
- 机器视觉中的工业零件检测。
相关文章:
OpenCV C++霍夫圆查找
OpenCV 中的霍夫圆检测基于 霍夫变换 (Hough Transform),它是一种从边缘图像中识别几何形状的算法。霍夫圆检测是专门用于检测图像中的圆形形状的。它通过将图像中的每个像素映射到可能的圆参数空间,来确定哪些像素符合圆形状。 1. 霍夫变换的原理 霍夫…...

H.264编解码介绍
一、简介 H.264,又称为AVC(Advanced Video Coding),是一种广泛使用的视频压缩标准。它由国际电信联盟(ITU)和国际标准化组织(ISO)联合开发,并于2003年发布。 H.264的发展历史可以追溯到上个世纪90年代。当时,视频压缩技术的主要标准是MPEG-2,但它在压缩率和视频质…...

Java | Leetcode Java题解之第450题删除二叉搜索树中的节点
题目: 题解: class Solution {public TreeNode deleteNode(TreeNode root, int key) {TreeNode cur root, curParent null;while (cur ! null && cur.val ! key) {curParent cur;if (cur.val > key) {cur cur.left;} else {cur cur.rig…...

【CViT】Deepfake Video Detection Using Convolutional Vision Transformer
文章目录 Deepfake Video Detection Using Convolutional Vision Transformerkey points**卷积视觉变压器**FLViT实验总结Deepfake Video Detection Using Convolutional Vision Transformer 会议/期刊:2021 作者: key points 提出了一种用于检测深度伪造的卷积视觉变压器…...

安卓主板_MTK4G/5G音视频记录仪整机及方案定制
音视频记录仪方案,采用联发科MT6877平台八核2* A78 6* A55主频高达2.4GHz, 具有高能低耗特性,搭载Android 12.0智能操作系统,可选4GB32GB/6GB128GB内存,运行流畅。主板集成NFC、双摄像头、防抖以及多种无线数据连接,支…...
)
Qt 教程全集目录公布(方便查阅)
点击上方"蓝字"关注我们 Qt 安装 以下是常见安装方法和软件获取 Qt4Qt5Qt6版本下载(在线和离线)【网址】...

云计算SLA响应时间的matlab模拟与仿真
目录 1.程序功能描述 2.测试软件版本以及运行结果展示 3.核心程序 4.本算法原理 5.完整程序 1.程序功能描述 用matlab模拟,一个排队理论。输入一堆包,经过buffer(一个或者几个都行)传给server,这些包会在buffer里…...
ARTS Week 42
Algorithm 本周的算法题为 2283. 判断一个数的数字计数是否等于数位的值 给你一个下标从 0 开始长度为 n 的字符串 num ,它只包含数字。 如果对于 每个 0 < i < n 的下标 i ,都满足数位 i 在 num 中出现了 num[i]次,那么请你返回 true …...
10.2学习
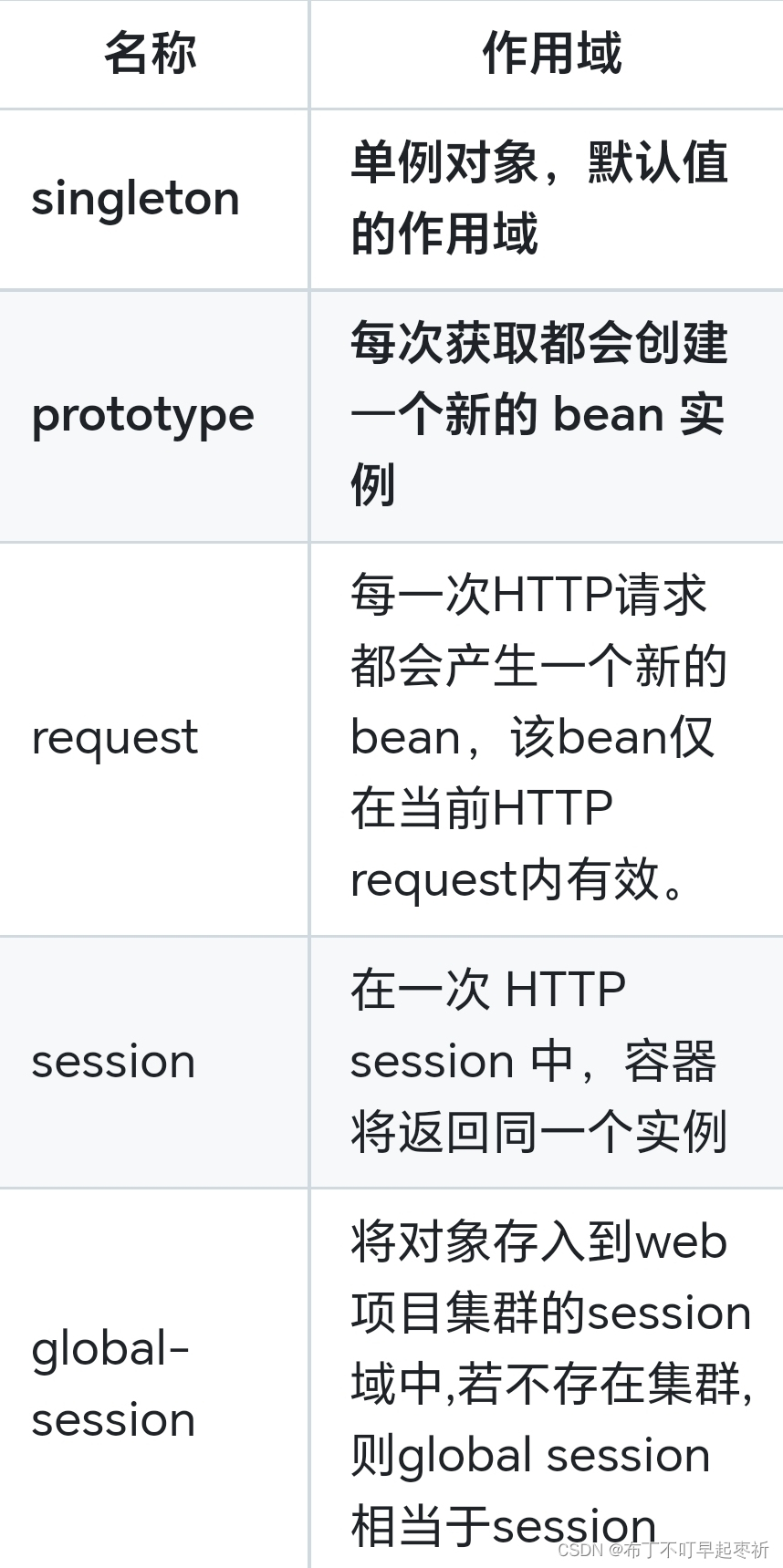
1.IOC控制反转 IoC(Inverse of Control:控制反转)是⼀种设计思想,就是将原本在程序中⼿动创建对象的控制权,交由Spring框架来管理。 IoC 在其他语⾔中也有应⽤,并⾮ Spring 特有。 IoC 容器是 Spring⽤来实现 IoC …...

【数一线性代数】021入门
Index 推荐阅读:https://blog.csdn.net/weixin_60702024/article/details/141729949分析实现总结 推荐阅读:https://blog.csdn.net/weixin_60702024/article/details/141729949 给定二叉树的根节点root,计算其叶节点的个数。 分析实现 类似…...
kubernetes中ConfigMap和Secret)
(k8s)kubernetes中ConfigMap和Secret
转载:ConfigMap 一、ConfigMap介绍 ConfigMap是一种API对象,用来将非机密性的数据保存到键值对中。使用时,Pod可以将其用作环境变量、命令行参数或存储卷中的配置文件。 ConfigMap将你的环境配置信息和容器镜像解耦,便于应用配置…...

stm32四足机器人(标准库)
项目技术要求 PWM波形的学习 参考文章stm32 TIM输出比较(PWM驱动LED呼吸灯&&PWM驱动舵机&&PWM驱动直流电机)_ttl pwm 驱动激光头区别-CSDN博客 舵机的学习 参考文章 stm32 TIM输出比较(PWM驱动LED呼吸灯&&PWM驱动舵机&&PWM驱动直流电机)…...

基于Hive和Hadoop的共享单车分析系统
本项目是一个基于大数据技术的共享单车分析系统,旨在为用户提供全面的单车使用信息和深入的出行行为分析。系统采用 Hadoop 平台进行大规模数据存储和处理,利用 MapReduce 进行数据分析和处理,通过 Sqoop 实现数据的导入导出,以 S…...

基于SSM和vue的机票订购管理系统
👉文末查看项目功能视频演示获取源码sql脚本视频导入教程视频 1 、功能描述 基于SSM和vue的机票订购管理系统2拥有两种角色 管理员:用户管理、机票管理、订票管理、公告管理、广告管理、系统管理、添加机票等 用户:登录注册、订票、查看公…...

【rCore OS 开源操作系统】Rust 练习题题解: Enums
【rCore OS 开源操作系统】Rust 练习题题解: Enums 摘要 rCore OS 开源操作系统训练营学习中的代码练习部分。 在此记录下自己学习过程中的产物,以便于日后更有“收获感”。 后续还会继续完成其他章节的练习题题解。 正文 enums1 题目 // enums1.rs // // No hi…...

VPN简述
文章目录 VPNVPN基础VPN类型 VPN VPN隧道安全 VPN基础 背景: 在网络传输中,绝大部分数据内容都是明文传输,存在很多安全隐患(窃听、篡改、冒充) 总部、分公司、办事处、出差人员、合作单位等需要访问总部网络资源 Vi…...
)
【Kubernetes】常见面试题汇总(四十九)
目录 110.假设一家公司希望通过采用新技术来优化其工作负载的分配。公司如何有效地实现这种资源分配? 111.考虑一家拼车公司希望通过同时扩展其平台来增加服务器数量。您认为公司将如何处理服务器及其安装? 特别说明: 题目 1-68 属于【…...

常见排序算法以及冒泡排序的基础使用方法
众所周知,冒泡排序是编程中最经典也是最简单的一种排序方法,它是通过重复访问对两个相邻的值进行比较,由于在互换的过程中,最大 (或最小) 的那个值会慢慢的交换到顶部,像汽水一样,故名“冒泡排序”。 let a…...
【网络安全】Cookie与ID未强绑定导致账户接管
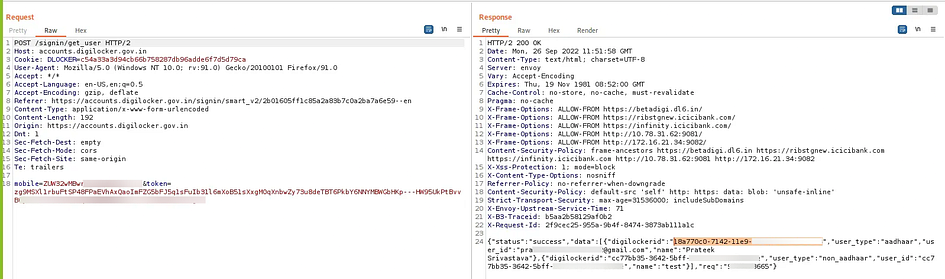
未经许可,不得转载。 文章目录 前言正文前言 DigiLocker 是一项在线服务,旨在为公民提供一个安全的数字平台,用于存储和访问重要的文档,如 Aadhaar 卡、PAN 卡和成绩单等。DigiLocker 通过多因素身份验证(MFA)来保护用户账户安全,通常包括 6 位数的安全 PIN 和一次性密…...

Ansible Playbook原理与实践(Principles and Practice of Ansible Playbook)
💝💝💝欢迎来到我的博客,很高兴能够在这里和您见面!希望您在这里可以感受到一份轻松愉快的氛围,不仅可以获得有趣的内容和知识,也可以畅所欲言、分享您的想法和见解。 本人主要分享计算机核心技…...

变量 varablie 声明- Rust 变量 let mut 声明与 C/C++ 变量声明对比分析
一、变量声明设计:let 与 mut 的哲学解析 Rust 采用 let 声明变量并通过 mut 显式标记可变性,这种设计体现了语言的核心哲学。以下是深度解析: 1.1 设计理念剖析 安全优先原则:默认不可变强制开发者明确声明意图 let x 5; …...

使用VSCode开发Django指南
使用VSCode开发Django指南 一、概述 Django 是一个高级 Python 框架,专为快速、安全和可扩展的 Web 开发而设计。Django 包含对 URL 路由、页面模板和数据处理的丰富支持。 本文将创建一个简单的 Django 应用,其中包含三个使用通用基本模板的页面。在此…...

智慧工地云平台源码,基于微服务架构+Java+Spring Cloud +UniApp +MySql
智慧工地管理云平台系统,智慧工地全套源码,java版智慧工地源码,支持PC端、大屏端、移动端。 智慧工地聚焦建筑行业的市场需求,提供“平台网络终端”的整体解决方案,提供劳务管理、视频管理、智能监测、绿色施工、安全管…...

FFmpeg 低延迟同屏方案
引言 在实时互动需求激增的当下,无论是在线教育中的师生同屏演示、远程办公的屏幕共享协作,还是游戏直播的画面实时传输,低延迟同屏已成为保障用户体验的核心指标。FFmpeg 作为一款功能强大的多媒体框架,凭借其灵活的编解码、数据…...
Vue3 + Element Plus + TypeScript中el-transfer穿梭框组件使用详解及示例
使用详解 Element Plus 的 el-transfer 组件是一个强大的穿梭框组件,常用于在两个集合之间进行数据转移,如权限分配、数据选择等场景。下面我将详细介绍其用法并提供一个完整示例。 核心特性与用法 基本属性 v-model:绑定右侧列表的值&…...

Java多线程实现之Callable接口深度解析
Java多线程实现之Callable接口深度解析 一、Callable接口概述1.1 接口定义1.2 与Runnable接口的对比1.3 Future接口与FutureTask类 二、Callable接口的基本使用方法2.1 传统方式实现Callable接口2.2 使用Lambda表达式简化Callable实现2.3 使用FutureTask类执行Callable任务 三、…...

数据库分批入库
今天在工作中,遇到一个问题,就是分批查询的时候,由于批次过大导致出现了一些问题,一下是问题描述和解决方案: 示例: // 假设已有数据列表 dataList 和 PreparedStatement pstmt int batchSize 1000; // …...

Caliper 配置文件解析:config.yaml
Caliper 是一个区块链性能基准测试工具,用于评估不同区块链平台的性能。下面我将详细解释你提供的 fisco-bcos.json 文件结构,并说明它与 config.yaml 文件的关系。 fisco-bcos.json 文件解析 这个文件是针对 FISCO-BCOS 区块链网络的 Caliper 配置文件,主要包含以下几个部…...
多模态大语言模型arxiv论文略读(108)
CROME: Cross-Modal Adapters for Efficient Multimodal LLM ➡️ 论文标题:CROME: Cross-Modal Adapters for Efficient Multimodal LLM ➡️ 论文作者:Sayna Ebrahimi, Sercan O. Arik, Tejas Nama, Tomas Pfister ➡️ 研究机构: Google Cloud AI Re…...

在WSL2的Ubuntu镜像中安装Docker
Docker官网链接: https://docs.docker.com/engine/install/ubuntu/ 1、运行以下命令卸载所有冲突的软件包: for pkg in docker.io docker-doc docker-compose docker-compose-v2 podman-docker containerd runc; do sudo apt-get remove $pkg; done2、设置Docker…...