【Linux驱动开发】设备树节点驱动开发入门
【Linux驱动开发】设备树节点驱动开发入门
文章目录
- 设备树文件
- 设备树文件驱动开发
- 附录:嵌入式Linux驱动开发基本步骤
- 开发环境
- 驱动文件
- 编译驱动
- 安装驱动
- 自动创建设备节点文件
- 驱动开发
- 驱动设备号
- 地址映射,虚拟内存和硬件内存地址
- 字符驱动
- 旧字符驱动
- 新字符驱动
- 应用程序开发
设备树文件
设备树源文件扩展名为.dts
编译后得到的文件为.dtb文件
如果要编译 DTS 文件的话只需要进入到 Linux 源码根目录下,然后执行如下命
令:
make ARCH=arm CROSS_COMPILE=arm-none-linux-gnueabihf- all
或者:
make ARCH=arm CROSS_COMPILE=arm-none-linux-gnueabihf- dtbs
编译指定的设备树文件则是:
make ARCH=arm CROSS_COMPILE=arm-none-linux-gnueabihf- stm32mp135d-atk.dtb
dts文件与C类似
也是通过#include来导入库
通过大括号来定义变量范围等等
其中 /表示根节点
根节点下又有很多设备节点 比如soc gpio 等等
对于设备节点 其最重要的是reg属性
reg 属性的值一般是(address,length)对。reg 属性一般用于描
述设备地址空间资源信息或者设备地址信息,比如某个外设的寄存器地址范围信息
如:
reg = <0x40011000 0x400>;
reg = <0X50000A28 0X04 /* RCC_MP_AHB4ENSETR */0X5000A000 0X04 /* GPIOI_MODER */0X5000A004 0X04 /* GPIOI_OTYPER */0X5000A008 0X04 /* GPIOI_OSPEEDR */0X5000A00C 0X04 /* GPIOI_PUPDR */0X5000A018 0X04 >; /* GPIOI_BSRR */
等等
下面那个写法 就表示该节点有一系列的reg寄存器表
除此之外 设备节点也有status、model、compatible等属性
并不是所有属性都必须要进行编写 具体根据设备来看
譬如在根节点下添加一个新的节点:
stm32mp1_led {compatible = "atkstm32mp1-led";status = "okay";reg = <0X50000A28 0X04 /* RCC_MP_AHB4ENSETR */0X5000A000 0X04 /* GPIOI_MODER */0X5000A004 0X04 /* GPIOI_OTYPER */0X5000A008 0X04 /* GPIOI_OSPEEDR */0X5000A00C 0X04 /* GPIOI_PUPDR */0X5000A018 0X04 >; /* GPIOI_BSRR */};
属性 compatible 设置 stm32mp1_led 节点兼容为“atkstm32mp1-led”。
属性 status 设置状态为“okay”。
以及reg 属性的地址段
设备树修改完成以后输入如下命令重新编译一下 stm32mp135d-atk.dts:
source /etc/profile
make ARCH=arm CROSS_COMPILE=arm-none-linux-gnueabihf- dtbs
编译完成以后得到 stm32mp135d-atk.dtb,使用新的 stm32mp135d-tk.dtb 替换到文件系统/lib/modules 目录下,使用 sync 指令同步缓存,启动 Linux 内核。Linux 启动成功以后进入到/proc/device-tree/目录中就能看到stm32mp1_led这个节点
记得一定要使用 sync 指令同步缓存
设备树文件驱动开发
通过OF函数可以实现对设备树中的设备节点的读取
如of_property_read_u32_array函数可以实现读取reg 属性
类似的还有以下这些函数 分别对应不同的长度
int of_property_read_u8_array(const struct device_node *np,
const char *propname,
u8 *out_values,
size_t sz)
int of_property_read_u16_array(const struct device_node *np,const char *propname, u16 *out_values, size_t sz)
int of_property_read_u32_array(const struct device_node *np,const char *propname, u32 *out_values,size_t sz)
int of_property_read_u64_array(const struct device_node *np,const char *propname, u64 *out_values,size_t sz)
函数参数和返回值含义如下:
np:设备节点。
proname: 要读取的属性名字。
out_value:读取到的数组值,分别为 u8、u16、u32 和 u64。
sz:要读取的数组元素数量。
返回值:0,读取成功,负值,读取失败,-EINVAL 表示属性不存在,-ENODATA 表示没
有要读取的数据,-EOVERFLOW 表示属性值列表太小。
读取后 就会保存在device_node类型的变量中
在提取地址时 可以通过of_iomap函数替代 ioremap函数来进行虚拟地址映射
void __iomem *of_iomap(struct device_node *np, int index)
其中 index表示第几段reg属性的地址 从0开始
如果 reg 属性只有一段的话 index 就设置为 0。
同样 也可以在out_values获取地址 然后用 ioremap函数来进行虚拟地址映射
在开发时 需要定义个设备节点变量 如:
device_node *nd;
然后通过OF函数获取这个设备节点的内容
dtsled.nd = of_find_node_by_path("/stm32mp1_led");
...
of_property_read_u32_array(dtsled.nd, "reg", regdata, 12);
最后 就跟普通的驱动开发一样了
附录:嵌入式Linux驱动开发基本步骤
开发环境
首先需要交叉编译器和Linux环境
这里如果是ARM内核 则需要采用ARM的交叉编译器编译器:
arm-none-linux-gnueabihf-gcc
同时需要目标ARM板子的Linux系统内核环境
并编译内核:
make ARCH=arm CROSS_COMPILE=arm-none-linux-gnueabihf- stm32mp1_atk_defconfig
make ARCH=arm CROSS_COMPILE=arm-none-linux-gnueabihf- uImage vmlinux dtbs LOADADDR=0xC2000040 -j4
make ARCH=arm CROSS_COMPILE=arm-none-linux-gnueabihf- stm32mp1_atk_defconfig
make ARCH=arm CROSS_COMPILE=arm-none-linux-gnueabihf- modules -j4
如果是第一次编译 则可能有所不同 需要根据实际手册来
以下是我编译好 打包好的虚拟机
通过百度网盘分享的文件:适用于STM32MP135开发板的开发环境虚拟机
链接:https://pan.baidu.com/s/1Sf_wk2gEPj0JlQ7X_rpQcg
提取码:d9sj
驱动文件
对于已完成的驱动开发 需要进行编译后进行安装
所有驱动文件在开发上都需要进行驱动入口和出口开发
譬如需要编写驱动入口和退出函数
static int __init xxx_init(void)
static void __exit xxx_exit(void)
然后再模块注册 需要调用到以下函数:
module_init(xxx_init); //注册模块加载函数
module_exit(xxx_exit); //注册模块卸载函数
最后在结尾添加作者和许可信息
MODULE_LICENSE("GPL");
MODULE_AUTHOR("zuozhongkai");
MODULE_INFO(intree, "Y");
为了欺骗内核,给本驱动添加 intree 标记,如果不加就会有“loading out-of-tree module taints kernel.”这个警告。
然后才能编译驱动
编译驱动
编译前要配置环境变量:
source /etc/profile
需要先在此文件中 指定环境所在目录
Makefile
KERNELDIR := /home/alientek/linux/atk-mp135/linux/my_linux/linux-5.15.24
CURRENT_PATH := $(shell pwd)obj-m := test.obuild: kernel_moduleskernel_modules:$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) modulesclean:$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) cleanmake ARCH=arm CROSS_COMPILE=arm-none-linux-gnueabihf-
安装驱动
将编译好的驱动推荐放置到ARM板子的/lib/modules/<kernel-version>目录下
加载驱动:
insmod test.ko 或 modprobe test
建议用modprobe 原因是可以解决依赖关系

查看已安装的模块:
使用lsmod或cat /proc/devices查看 其中 还能看到已安装的驱动设备号(新安装的不能重复)
创建设备节点文件:(如果自动创建就不需要)
mknod /dev/test c 200 0
查看节点文件:
ls /dev/test -l

最后如果不需要了 则卸载
卸载模块:
rmmod test 或 modprobe -r test
自动创建设备节点文件
使用udev 或 mdev即可实现自动创建
如果要使用 则在驱动开发中写入到驱动入口函数中
(一般在 cdev_add 函数后面添加自动创建设备节点相关代码 一些具体的变量和说明见后文新字符驱动开发)
完成开发后 安装驱动时就自动帮你创建好驱动设备节点文件
否则就需要手动去添加
首先要创建一个 class 类,class 是个结构体,定义在文件include/linux/device/class.h 里面。class_create 是类创建函数,class_create 是个宏定义
struct class *class_create (struct module *owner, const char *name)
class_create 一共有两个参数,参数 owner 一般为 THIS_MODULE,参数 name 是类名字
卸载驱动程序的时候需要删除掉类,类删除函数为 class_destroy,函数原型如下:
void class_destroy(struct class *cls);
然后使用 device_create 函数在类下面创建设备
device_create(struct class *cls,struct device *parent,dev_t devt,void *drvdata,const char *fmt, ...);
参数 cls 就是设备要创建哪个类下面;参数 parent 是父设备,一般为 NULL,也就是没有父设备;参数 devt 是设备号;参数 drvdata 是设备可能会使用的一些数据,一般为 NULL;参数 fmt 是设备名字,如果设置 fmt=xxx 的话,就会生成/dev/xxx 这个设备文件。
卸载则调用:
void device_destroy(struct class *cls, dev_t devt);
如在已知设备号的情况下进行注册:
struct class *class; /* 类 */
struct device *device; /* 设备 */
dev_t devid; /* 设备号 */ /* 驱动入口函数 */static int __init xxx_init(void)
{/* 创建类 */
class = class_create(THIS_MODULE, "xxx");
/* 创建设备 */
device = device_create(class, NULL, devid, NULL, "xxx");
return 0;
}/* 驱动出口函数 */static void __exit led_exit(void)
{/* 删除设备 */device_destroy(newchrled.class, newchrled.devid);/* 删除类 */
class_destroy(newchrled.class);}module_init(led_init);
module_exit(led_exit);
以上这些设备号、类、驱动等变量太多 可以用一个结构体来表示
/* 设备结构体 */
struct test_dev{
dev_t devid; /* 设备号 */
struct cdev cdev; /* cdev */
struct class *class; /* 类 */
struct device *device; /* 设备 */
int major; /* 主设备号 */
int minor; /* 次设备号 */
};
通过将此结构体写入到驱动文件的私有变量中 即可使开发变得安全、规范
如:
struct test_dev testdev;/* open 函数 */
static int test_open(struct inode *inode, struct file *filp)
{
filp->private_data = &testdev; /* 设置私有数据 */
return 0;
}
驱动开发
通过开发字符驱动等设备 编译成驱动*.ko文件 然后安装后即可调用
驱动设备号
驱动主要有主设备号 次设备号和驱动名
可以自定义 也可以自动申请
自定义的话 主设备号不能用冲突
查看已安装的模块:
使用lsmod或cat /proc/devices查看 其中 还能看到已安装的驱动设备号(新安装的不能重复)
如果不采用分配的方式进行 直接自定义的话 就不需要看这一节下面的内容了
但如果要分配设备号的话 这里引入dev_t类型的设备号变量:
动态分配则用以下函数申请:
int alloc_chrdev_region(dev_t *dev, unsigned baseminor, unsigned count, const char *name)
函数 alloc_chrdev_region 用于申请设备号,此函数有 4 个参数:
dev:保存申请到的设备号。
baseminor:次设备号起始地址,alloc_chrdev_region 可以申请一段连续的多个设备号,这
些设备号的主设备号一样,但是次设备号不同,次设备号以 baseminor 为起始地址地址开始递
增。一般 baseminor 为 0,也就是说次设备号从 0 开始。
count:要申请的设备号数量。
name:设备名字。
注销字符设备之后要释放掉设备号,设备号释放函数如下:
void unregister_chrdev_region(dev_t from, unsigned count)
或者采用以下两个函数都能来进行申请 第二个函数首先得是确定了主设备号的
//无设备号
int alloc_chrdev_region(dev_t *dev, unsigned baseminor, unsigned count, const char *name)
//给定了设备号
int register_chrdev_region(dev_t from, unsigned count, const char *name)
如:
int major; /* 主设备号 */
int minor; /* 次设备号 */
dev_t devid; /* 设备号 */if (major) { /* 定义了主设备号 */devid = MKDEV(major, 0); /* 大部分驱动次设备号都选择 0*/
register_chrdev_region(devid, 1, "test");
} else { /* 没有定义设备号 */
alloc_chrdev_region(&devid, 0, 1, "test"); /* 申请设备号 */major = MAJOR(devid); /* 获取分配号的主设备号 */minor = MINOR(devid); /* 获取分配号的次设备号 */}
如果 major 有效的话就使用 MKDEV 来构建设备号,次设备号选择 0。
如果 major 无效,那就表示没有给定设备号。此时就要使用 alloc_chrdev_region
函数来申请设备号。设备号申请成功以后使用 MAJOR 和 MINOR 来提取出主设备号和次设备
号
注销字符设备之后要释放掉设备号 则是调用:
void unregister_chrdev_region(dev_t from, unsigned count)
直接传入设备号数量即可
地址映射,虚拟内存和硬件内存地址
Linux设备如果最后要操作寄存器进行开发的话 不可避免的会使用内核寄存器
Linux设备如今大多已支持直接从硬件地址读写 但不建议直接采用
对于安装了MMU的设备 可以通过MMU映射到虚拟内存地址 然后对虚拟内存读写后内核则进行物理地址操作
ioremap 函数用于获取指定物理地址空间对应的虚拟地址空间
void __iomem *ioremap(resource_size_t res_cookie, size_t size);
卸载则用:
void iounmap (volatile void __iomem *addr)
Linux设备最好是通过虚拟内存来访问 并且用以下的几组函数来操作内存
使用 ioremap 函数将寄存器的物理地址映射到虚拟地址以后,我们就可以直接通过指针访问这些地址,但是 Linux 内核不建议这么做,而是推荐使用一组操作函数来对映射后的内存进行读写操作。
读:
u8 readb(const volatile void __iomem *addr)u16 readw(const volatile void __iomem *addr)u32 readl(const volatile void __iomem *addr)
写:
void writeb(u8 value, volatile void __iomem *addr)void writew(u16 value, volatile void __iomem *addr)void writel(u32 value, volatile void __iomem *addr)
字符驱动
其中 所有的外设、驱动等 都可以用字符驱动来开发 但不一定方便
因为字符驱动只能进行简单的打开 销毁 读写等
虽然本质上驱动的开发也是寄存器的读写 但用字符设备还是限制性很大
字符驱动可以实现open close write read等操作
另外字符驱动的文件结构体file中
有一个private_data变量 也就是私有变量 可以在初始化时将一些外部参数初始化成该变量存入
设置好好以后 就可以在在 write、read、close 等函数中直接读取 private_data即可得到设备结构体
旧字符驱动
字符驱动就是file文件驱动 在应用层用open read write close等函数来操作
字符驱动注册和注销需要:
static inline int register_chrdev(unsigned int major,
const char *name,
const struct file_operations *fops)
static inline void unregister_chrdev(unsigned int major,
const char *name)
需要编写驱动入口和退出函数
static int __init xxx_init(void)
static void __exit xxx_exit(void)
然后再模块注册 需要调用到以下函数:
module_init(xxx_init); //注册模块加载函数
module_exit(xxx_exit); //注册模块卸载函数
在驱动入口和退出函数中调用register_chrdev和unregister_chrdev函数进行字符驱动的注册与注销
其中 注册时需要传参设备号、名称和file_operations结构体
结构体中需要指定函数名称 该结构体下全是回调函数(函数指针)但也不是全部都要写 不过必须得几项必须要填
如:
static struct file_operations test_fops = {.owner = THIS_MODULE,
.open = chrtest_open,
.read = chrtest_read,.write = chrtest_write,
.release = chrtest_release,
};
另外 在write和read函数中 用户不得直接访问内存空间 所以要借助copy_from_user和copy_to_user来进行操作
最后在结尾添加作者和许可信息
MODULE_LICENSE("GPL");
MODULE_AUTHOR("zuozhongkai");
MODULE_INFO(intree, "Y");
为了欺骗内核,给本驱动添加 intree 标记,如果不加就会有“loading out-of-tree module taints kernel.”这个警告。
完整的代码如:
#include <linux/types.h>
#include <linux/kernel.h>
#include <linux/delay.h>
#include <linux/gpio.h>
#include <linux/init.h>
#include <linux/module.h>/***************************************************************
Copyright © ALIENTEK Co., Ltd. 1998-2029. All rights reserved.
文件名 : chrdevbase.c
作者 : 正点原子
版本 : V1.0
描述 : chrdevbase驱动文件。
其他 : 无
论坛 : www.openedv.com
日志 : 初版V1.0 2020/12/26 正点原子创建
***************************************************************/#define CHRDEVBASE_MAJOR 200 /* 主设备号 */
#define CHRDEVBASE_NAME "chrdevbase" /* 设备名 */static char readbuf[100]; /* 读缓冲区 */
static char writebuf[100]; /* 写缓冲区 */
static char kerneldata[] = {"kernel data!"};/** @description : 打开设备* @param - inode : 传递给驱动的inode* @param - filp : 设备文件,file结构体有个叫做private_data的成员变量* 一般在open的时候将private_data指向设备结构体。* @return : 0 成功;其他 失败*/
static int chrdevbase_open(struct inode *inode, struct file *filp)
{//printk("chrdevbase open!\r\n");return 0;
}/** @description : 从设备读取数据 * @param - filp : 要打开的设备文件(文件描述符)* @param - buf : 返回给用户空间的数据缓冲区* @param - cnt : 要读取的数据长度* @param - offt : 相对于文件首地址的偏移* @return : 读取的字节数,如果为负值,表示读取失败*/
static ssize_t chrdevbase_read(struct file *filp, char __user *buf, size_t cnt, loff_t *offt)
{int retvalue = 0;/* 向用户空间发送数据 */memcpy(readbuf, kerneldata, sizeof(kerneldata));retvalue = copy_to_user(buf, readbuf, cnt);if(retvalue == 0){printk("kernel senddata ok!\r\n");}else{printk("kernel senddata failed!\r\n");}//printk("chrdevbase read!\r\n");return 0;
}/** @description : 向设备写数据 * @param - filp : 设备文件,表示打开的文件描述符* @param - buf : 要写给设备写入的数据* @param - cnt : 要写入的数据长度* @param - offt : 相对于文件首地址的偏移* @return : 写入的字节数,如果为负值,表示写入失败*/
static ssize_t chrdevbase_write(struct file *filp, const char __user *buf, size_t cnt, loff_t *offt)
{int retvalue = 0;/* 接收用户空间传递给内核的数据并且打印出来 */retvalue = copy_from_user(writebuf, buf, cnt);if(retvalue == 0){printk("kernel recevdata:%s\r\n", writebuf);}else{printk("kernel recevdata failed!\r\n");}//printk("chrdevbase write!\r\n");return 0;
}/** @description : 关闭/释放设备* @param - filp : 要关闭的设备文件(文件描述符)* @return : 0 成功;其他 失败*/
static int chrdevbase_release(struct inode *inode, struct file *filp)
{//printk("chrdevbase release!\r\n");return 0;
}/** 设备操作函数结构体*/
static struct file_operations chrdevbase_fops = {.owner = THIS_MODULE, .open = chrdevbase_open,.read = chrdevbase_read,.write = chrdevbase_write,.release = chrdevbase_release,
};/** @description : 驱动入口函数 * @param : 无* @return : 0 成功;其他 失败*/
static int __init chrdevbase_init(void)
{int retvalue = 0;/* 注册字符设备驱动 */retvalue = register_chrdev(CHRDEVBASE_MAJOR, CHRDEVBASE_NAME, &chrdevbase_fops);if(retvalue < 0){printk("chrdevbase driver register failed\r\n");}printk("chrdevbase init!\r\n");return 0;
}/** @description : 驱动出口函数* @param : 无* @return : 无*/
static void __exit chrdevbase_exit(void)
{/* 注销字符设备驱动 */unregister_chrdev(CHRDEVBASE_MAJOR, CHRDEVBASE_NAME);printk("chrdevbase exit!\r\n");
}/* * 将上面两个函数指定为驱动的入口和出口函数 */
module_init(chrdevbase_init);
module_exit(chrdevbase_exit);/* * LICENSE和作者信息*/
MODULE_LICENSE("GPL");
MODULE_AUTHOR("ALIENTEK");
MODULE_INFO(intree, "Y");
然后就可以开始编译
新字符驱动
新字符驱动可以自动生成设备树文件等 比较方便 开发的方式大同小异
在 Linux 中使用 cdev 结构体表示一个字符设备,cdev 结构体在 include/linux/cdev.h 文件中
的定义如下:
示例代码 9.1.2.1 cdev 结构体
struct cdev {
struct kobject kobj;
struct module *owner;
const struct file_operations *ops;
struct list_head list;
dev_t dev;
unsigned int count;
} __randomize_layout;
可以看到 里面包含了file_operations 结构体 以及dev_t 变量等等
定义了cdev变量后 需要进行初始化
void cdev_init(struct cdev *cdev, const struct file_operations *fops)
这里就需要传参file_operations变量了
这两个结构体的.owner都要为THIS_MODULE
如:
struct cdev testcdev;/* 设备操作函数 */
static struct file_operations test_fops = {.owner = THIS_MODULE,/* 其他具体的初始项 */};testcdev.owner = THIS_MODULE;
cdev_init(&testcdev, &test_fops);
cdev_add(&testcdev, devid, 1);
初始化后 使用以下函数往cdev中添加dev设备号变量
这里要注意 虽然cdev中有dev变量 但不能直接赋值 需要使用cdev_add函数来添加
事实上 无论是写入dev还是读取dev 都不可直接在cdev中进行操作
(如果是C++ 就可以规定私有属性了 但C语言这里不行)
int cdev_add(struct cdev *p, dev_t dev, unsigned count)
卸载时则需要删除cdev
void cdev_del(struct cdev *p)
同时也要用unregister_chrdev_region函数去注销外部的dev变量
加上自动创建设备树等功能 则完整代码为:
#include <linux/types.h>
#include <linux/kernel.h>
#include <linux/delay.h>#include <linux/init.h>
#include <linux/module.h>
#include <linux/errno.h>
#include <linux/gpio.h>
#include <linux/cdev.h>
#include <linux/device.h>
#include <asm/mach/map.h>
#include <asm/uaccess.h>
#include <asm/io.h>/***************************************************************
Copyright © ALIENTEK Co., Ltd. 1998-2029. All rights reserved.
文件名 : newchrled.c
作者 : 正点原子
版本 : V1.0
描述 : LED驱动文件。
其他 : 无
论坛 : www.openedv.com
日志 : 初版V1.0 2020/11/24 正点原子团队创建
***************************************************************/
#define NEWCHRLED_CNT 1 /* 设备号个数 */
#define NEWCHRLED_NAME "newchrled" /* 名字 */
#define LEDOFF 0 /* 关灯 */
#define LEDON 1 /* 开灯 *//* 寄存器物理地址 */
#define PERIPH_BASE (0x40000000)
#define MPU_AHB4_PERIPH_BASE (PERIPH_BASE + 0x10000000)
#define RCC_BASE (MPU_AHB4_PERIPH_BASE + 0x0000)
#define RCC_MP_AHB4ENSETR (RCC_BASE + 0XA28)
#define GPIOI_BASE (MPU_AHB4_PERIPH_BASE + 0xA000)
#define GPIOI_MODER (GPIOI_BASE + 0x0000)
#define GPIOI_OTYPER (GPIOI_BASE + 0x0004)
#define GPIOI_OSPEEDR (GPIOI_BASE + 0x0008)
#define GPIOI_PUPDR (GPIOI_BASE + 0x000C)
#define GPIOI_BSRR (GPIOI_BASE + 0x0018)/* 映射后的寄存器虚拟地址指针 */
static void __iomem *MPU_AHB4_PERIPH_RCC_PI;
static void __iomem *GPIOI_MODER_PI;
static void __iomem *GPIOI_OTYPER_PI;
static void __iomem *GPIOI_OSPEEDR_PI;
static void __iomem *GPIOI_PUPDR_PI;
static void __iomem *GPIOI_BSRR_PI;/* newchrled设备结构体 */
struct newchrled_dev{dev_t devid; /* 设备号 */struct cdev cdev; /* cdev */struct class *class; /* 类 */struct device *device; /* 设备 */int major; /* 主设备号 */int minor; /* 次设备号 */
};struct newchrled_dev newchrled; /* led设备 *//** @description : LED打开/关闭* @param - sta : LEDON(0) 打开LED,LEDOFF(1) 关闭LED* @return : 无*/
void led_switch(u8 sta)
{u32 val = 0;if(sta == LEDON) {val = readl(GPIOI_BSRR_PI);val |= (1 << 19); writel(val, GPIOI_BSRR_PI);}else if(sta == LEDOFF) {val = readl(GPIOI_BSRR_PI);val|= (1 << 3); writel(val, GPIOI_BSRR_PI);}
}/** @description : 取消映射* @return : 无*/
void led_unmap(void)
{/* 取消映射 */iounmap(MPU_AHB4_PERIPH_RCC_PI);iounmap(GPIOI_MODER_PI);iounmap(GPIOI_OTYPER_PI);iounmap(GPIOI_OSPEEDR_PI);iounmap(GPIOI_PUPDR_PI);iounmap(GPIOI_BSRR_PI);
}/** @description : 打开设备* @param - inode : 传递给驱动的inode* @param - filp : 设备文件,file结构体有个叫做private_data的成员变量* 一般在open的时候将private_data指向设备结构体。* @return : 0 成功;其他 失败*/
static int led_open(struct inode *inode, struct file *filp)
{filp->private_data = &newchrled; /* 设置私有数据 */return 0;
}/** @description : 从设备读取数据 * @param - filp : 要打开的设备文件(文件描述符)* @param - buf : 返回给用户空间的数据缓冲区* @param - cnt : 要读取的数据长度* @param - offt : 相对于文件首地址的偏移* @return : 读取的字节数,如果为负值,表示读取失败*/
static ssize_t led_read(struct file *filp, char __user *buf, size_t cnt, loff_t *offt)
{return 0;
}/** @description : 向设备写数据 * @param - filp : 设备文件,表示打开的文件描述符* @param - buf : 要写给设备写入的数据* @param - cnt : 要写入的数据长度* @param - offt : 相对于文件首地址的偏移* @return : 写入的字节数,如果为负值,表示写入失败*/
static ssize_t led_write(struct file *filp, const char __user *buf, size_t cnt, loff_t *offt)
{int retvalue;unsigned char databuf[1];unsigned char ledstat;retvalue = copy_from_user(databuf, buf, cnt);if(retvalue < 0) {printk("kernel write failed!\r\n");return -EFAULT;}ledstat = databuf[0]; /* 获取状态值 */if(ledstat == LEDON) { led_switch(LEDON); /* 打开LED灯 */} else if(ledstat == LEDOFF) {led_switch(LEDOFF); /* 关闭LED灯 */}return 0;
}/** @description : 关闭/释放设备* @param - filp : 要关闭的设备文件(文件描述符)* @return : 0 成功;其他 失败*/
static int led_release(struct inode *inode, struct file *filp)
{return 0;
}/* 设备操作函数 */
static struct file_operations newchrled_fops = {.owner = THIS_MODULE,.open = led_open,.read = led_read,.write = led_write,.release = led_release,
};/** @description : 驱动出口函数* @param : 无* @return : 无*/
static int __init led_init(void)
{u32 val = 0;int ret;/* 初始化LED *//* 1、寄存器地址映射 */MPU_AHB4_PERIPH_RCC_PI = ioremap(RCC_MP_AHB4ENSETR, 4);GPIOI_MODER_PI = ioremap(GPIOI_MODER, 4);GPIOI_OTYPER_PI = ioremap(GPIOI_OTYPER, 4);GPIOI_OSPEEDR_PI = ioremap(GPIOI_OSPEEDR, 4);GPIOI_PUPDR_PI = ioremap(GPIOI_PUPDR, 4);GPIOI_BSRR_PI = ioremap(GPIOI_BSRR, 4);/* 2、使能PI时钟 */val = readl(MPU_AHB4_PERIPH_RCC_PI);val &= ~(0X1 << 8); /* 清除以前的设置 */val |= (0X1 << 8); /* 设置新值 */writel(val, MPU_AHB4_PERIPH_RCC_PI);/* 3、设置PI3通用的输出模式。*/val = readl(GPIOI_MODER_PI);val &= ~(0X3 << 3); /* bit0:1清零 */val |= (0X1 << 3); /* bit0:1设置01 */writel(val, GPIOI_MODER_PI);/* 3、设置PI3为推挽模式。*/val = readl(GPIOI_OTYPER_PI);val &= ~(0X1 << 3); /* bit0清零,设置为上拉*/writel(val, GPIOI_OTYPER_PI);/* 4、设置PI3为高速。*/val = readl(GPIOI_OSPEEDR_PI);val &= ~(0X3 << 3); /* bit0:1 清零 */val |= (0x2 << 3); /* bit0:1 设置为10*/writel(val, GPIOI_OSPEEDR_PI);/* 5、设置PI3为上拉。*/val = readl(GPIOI_PUPDR_PI);val &= ~(0X3 << 3); /* bit0:1 清零*/val |= (0x1 << 3); /*bit0:1 设置为01*/writel(val,GPIOI_PUPDR_PI);/* 6、默认关闭LED */val = readl(GPIOI_BSRR_PI);val |= (0x1 << 3);writel(val, GPIOI_BSRR_PI);/* 注册字符设备驱动 *//* 1、创建设备号 */if (newchrled.major) { /* 定义了设备号 */newchrled.devid = MKDEV(newchrled.major, 0);ret = register_chrdev_region(newchrled.devid, NEWCHRLED_CNT, NEWCHRLED_NAME);if(ret < 0) {pr_err("cannot register %s char driver [ret=%d]\n",NEWCHRLED_NAME, NEWCHRLED_CNT);goto fail_map;}} else { /* 没有定义设备号 */ret = alloc_chrdev_region(&newchrled.devid, 0, NEWCHRLED_CNT, NEWCHRLED_NAME); /* 申请设备号 */if(ret < 0) {pr_err("%s Couldn't alloc_chrdev_region, ret=%d\r\n", NEWCHRLED_NAME, ret);goto fail_map;}newchrled.major = MAJOR(newchrled.devid); /* 获取分配号的主设备号 */newchrled.minor = MINOR(newchrled.devid); /* 获取分配号的次设备号 */}printk("newcheled major=%d,minor=%d\r\n",newchrled.major, newchrled.minor); /* 2、初始化cdev */newchrled.cdev.owner = THIS_MODULE;cdev_init(&newchrled.cdev, &newchrled_fops);/* 3、添加一个cdev */ret = cdev_add(&newchrled.cdev, newchrled.devid, NEWCHRLED_CNT);if(ret < 0)goto del_unregister;/* 4、创建类 */newchrled.class = class_create(THIS_MODULE, NEWCHRLED_NAME);if (IS_ERR(newchrled.class)) {goto del_cdev;}/* 5、创建设备 */newchrled.device = device_create(newchrled.class, NULL, newchrled.devid, NULL, NEWCHRLED_NAME);if (IS_ERR(newchrled.device)) {goto destroy_class;}return 0;destroy_class:class_destroy(newchrled.class);
del_cdev:cdev_del(&newchrled.cdev);
del_unregister:unregister_chrdev_region(newchrled.devid, NEWCHRLED_CNT);
fail_map:led_unmap();return -EIO;}/** @description : 驱动出口函数* @param : 无* @return : 无*/
static void __exit led_exit(void)
{/* 取消映射 */led_unmap();/* 注销字符设备驱动 */cdev_del(&newchrled.cdev);/* 删除cdev */unregister_chrdev_region(newchrled.devid, NEWCHRLED_CNT); /* 注销设备号 */device_destroy(newchrled.class, newchrled.devid);class_destroy(newchrled.class);
}module_init(led_init);
module_exit(led_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("ALIENTEK");
MODULE_INFO(intree, "Y");
然后就可以去编译了
应用程序开发
所谓应用程序 就是调用驱动就行各种任务 这里是Linux C应用开发
当然 如果你用Python啥的去调用驱动也可以
应用程序可以对/dev/下的驱动进行读写等操作 前提是已经安装了驱动
开发后 使用一条简单的命令即可编译
测试的应用程序采用open等函数进行驱动操作 写好后执行编译
arm-none-linux-gnueabihf-gcc test_app.c -o test_app
最后进行测试即可
相关文章:
【Linux驱动开发】设备树节点驱动开发入门
【Linux驱动开发】设备树节点驱动开发入门 文章目录 设备树文件设备树文件驱动开发附录:嵌入式Linux驱动开发基本步骤开发环境驱动文件编译驱动安装驱动自动创建设备节点文件 驱动开发驱动设备号地址映射,虚拟内存和硬件内存地址字符驱动旧字符驱动新字…...

C++——string的模拟实现(下)
目录 成员函数 3.4 修改操作 (3)insert()函数 (4)pop_back()函数 (5)erase()函数 (6)swap()函数 3.5 查找操作 (1)find()函数 (2)substr()函数 3.6 重载函数 (1)operator赋值函数 (2)其他比较函数 (3)流插入和流提取 完整代码 结束语 第一篇链接:C——…...

面试 Java 基础八股文十问十答第二十九期
面试 Java 基础八股文十问十答第二十九期 作者:程序员小白条,个人博客 相信看了本文后,对你的面试是有一定帮助的!关注专栏后就能收到持续更新! ⭐点赞⭐收藏⭐不迷路!⭐ 1)类加载过程 类加载…...

454.四数相加||
题目: 454. 四数相加 II - 力扣(LeetCode) 思路: 考虑到时间复杂度问题,本题最重要的是要将四个数组划分成两个部分,每个部分(n^2)的时间复杂度,选取数据结构时,考虑到既要存储元素(key),又要有元素次数…...

禅道源码部署
文章目录 禅道部署1.环境部署安装httpd和mariadb安装php 2.安装禅道首先进行httpd服务的配置安装禅道 禅道部署 1.环境部署 安装lamp环境 组件版本httpdyum安装mariadbyum安装phpphp-7.4.33 选择一个php版本就行,我们这里选择的是7.4.33 安装httpd和mariadb [r…...

️ Vulnhuntr:利用大型语言模型(LLM)进行零样本漏洞发现的工具
在网络安全领域,漏洞的发现和修复是保护系统安全的关键。今天,我要向大家介绍一款创新的工具——Vulnhuntr,这是一款利用大型语言模型(LLM)进行零样本漏洞发现的工具,能够自动分析代码,检测远程…...

【Android】多渠道打包配置
目录 简介打包配置签名配置渠道配置配置打包出来的App名称正式包与测试包配置 打包方式开发工具打包命令行打包 优缺点 简介 多渠道打包 是指在打包一个 Android 应用时,一次编译生成多个 APK 文件,每个 APK 文件针对一个特定的渠道。不同的渠道可能代表…...

Spring Boot Configuration和AutoConfiguration加载逻辑和加载顺序调整
在spring中, AutoConfiguration也是一个种Configuration,只是AutoConfiguration是不能使用proxy的。 而且spring对于两者的加载顺序也不是一视同仁,是有顺序的。spring会先加载@SpringBootApplication可达的且标注了@Configuration的类,这个过程会将@AutoConfiguration标注…...

点餐系统需求分析说明书(软件工程分析报告JAVA)
目录 1 引言 4 1.1 编写目的 4 1.2 项目背景 4 1.3 定义 4 1.4 预期的读者 5 1.5 参考资料 5 2 任务概述 5 2.1 目标 5 2.2 运行环境 5 2.3 条件与限制 6 3 数据描述 6 3.1 静态数据 6 3.2 动态数据 6 3.3 数据库介绍 6 3.4 对象模型 6 3.5 数据采集 7 4 动态模型 7 4.1 脚本 …...

Python条形图 | 指标(特征)重要性图的绘制
在数据科学和机器学习的工作流程中,特征选择是一个关键步骤。通过评估每个特征对模型预测能力的影响,我们可以选择最有意义的特征(指标),从而提高模型的性能并减少过拟合。本文将介绍如何使用 Python 的 Seaborn 和 Ma…...

危险物品图像分割系统:一键训练
危险物品图像分割系统源码&数据集分享 [yolov8-seg-GFPN&yolov8-seg-CSwinTransformer等50全套改进创新点发刊_一键训练教程_Web前端展示] 1.研究背景与意义 项目参考ILSVRC ImageNet Large Scale Visual Recognition Challenge 项目来源AAAI Global…...

城市景色视频素材下载好去处
在制作短视频、Vlog 或商业宣传片时,城市景色视频素材能为作品增添现代感与活力。繁华都市、流光溢彩的夜景、清晨街道等都是展现城市魅力的好素材。那么城市景色视频素材去哪里下载呢? 蛙学网 是专为短视频创作者打造的素材平台,城市景色素材…...
基于SSM美容院管理系统的设计
管理员账户功能包括:系统首页,个人中心,用户管理,套餐类型管理,美容预约管理,生日提醒管理,管理员管理,系统管理 员工账号功能包括:系统首页,个人中心&#…...
3d 地图的柱状图和文字显示)
Threejs 实现3D 地图(04)3d 地图的柱状图和文字显示
3d 地图的数据展示 代码仓库: King/threejs-3d-map 核心代码: function createText(feature, level, font) {if (feature.properties.name) {const [x_XYZ, y_XYZ] handleProject(feature.properties.center)// 缺点:首次渲染很慢 无法使…...

Oracle 第2章:安装与配置Oracle
安装与配置Oracle数据库是一项复杂但有序的过程。以下是对Oracle数据库安装与配置的概述,包括系统需求与硬件推荐,以及详细的安装步骤。 系统需求与硬件推荐 系统需求 在安装Oracle数据库之前,需要确保目标系统满足Oracle官方规定的最低要…...

动态规划 —— 斐波那契数列模型-解码方法
1. 解码方法 题目链接: 91. 解码方法 - 力扣(LeetCode)https://leetcode.cn/problems/decode-ways/description/ 2. 题目解析 1. 对字母A - Z进行编码1-26 2. 11106可以解码为1-1-10-6或者11-10-6, 但是11-1-06不能解码 3. 0n不能解码 4. …...

PPT / Powerpoint中利用LaTeX输入公式
PPT / Powerpoint中利用LaTeX输入公式_ppt插入latex公式-CSDN博客文章浏览阅读2.8w次,点赞42次,收藏75次。新版的Word(Office 2016后?)是支持LaTeX公式输入的,但是Powerpoint并不支持。下面介绍如何利用。_…...

C++ 模板专题 - 类型擦除
一:概述 C 中的类型擦除(Type Erasure)是一种技术,允许你在不暴露具体类型信息的情况下,通过统一的接口处理不同的类型。这种技术常用于实现泛型编程,特别是在需要支持多种不同类型的情况下,如容…...

RuoYi-Vue项目 重点代码讲解
1. RuoYi-Vue项目 常规说明: ruoyi-admin:后台接口开发(主要存放控制层相关代码)ruoyi-common:通用工具ruoyi-framework:框架核心ruoyi-generator:代码生成(可以移除)r…...

pandas习题 024:用字典构造 DataFrame
编码题)用 Python 的字典构造一个 DataFrame,它有 a、b 两列,三行数据。其中 a 列值为 1、4、7,b 列值为 2、5、8,索引为 x、y、z。 即: ‘’’ a b x 1 2 y 4 5 z 7 8 ‘’’ import pandas as pddf = pd.DataFrame({a: [1, 4,...

STM32F4基本定时器使用和原理详解
STM32F4基本定时器使用和原理详解 前言如何确定定时器挂载在哪条时钟线上配置及使用方法参数配置PrescalerCounter ModeCounter Periodauto-reload preloadTrigger Event Selection 中断配置生成的代码及使用方法初始化代码基本定时器触发DCA或者ADC的代码讲解中断代码定时启动…...
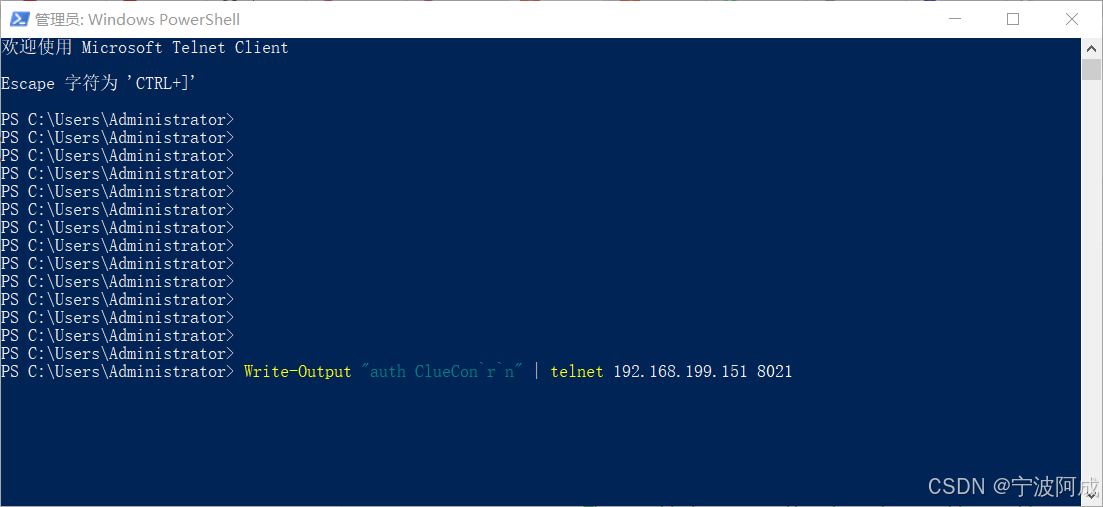
用docker来安装部署freeswitch记录
今天刚才测试一个callcenter的项目,所以尝试安装freeswitch 1、使用轩辕镜像 - 中国开发者首选的专业 Docker 镜像加速服务平台 编辑下面/etc/docker/daemon.json文件为 {"registry-mirrors": ["https://docker.xuanyuan.me"] }同时可以进入轩…...

【C++从零实现Json-Rpc框架】第六弹 —— 服务端模块划分
一、项目背景回顾 前五弹完成了Json-Rpc协议解析、请求处理、客户端调用等基础模块搭建。 本弹重点聚焦于服务端的模块划分与架构设计,提升代码结构的可维护性与扩展性。 二、服务端模块设计目标 高内聚低耦合:各模块职责清晰,便于独立开发…...
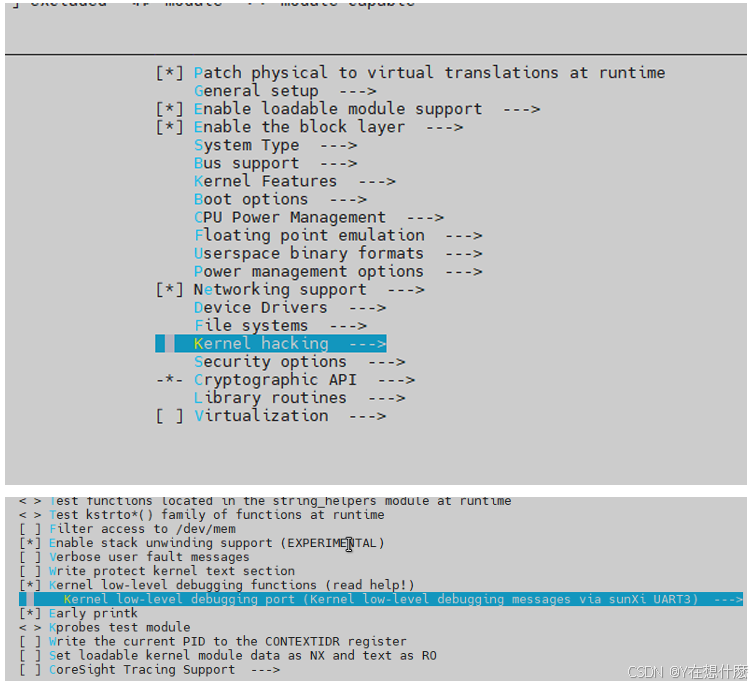
全志A40i android7.1 调试信息打印串口由uart0改为uart3
一,概述 1. 目的 将调试信息打印串口由uart0改为uart3。 2. 版本信息 Uboot版本:2014.07; Kernel版本:Linux-3.10; 二,Uboot 1. sys_config.fex改动 使能uart3(TX:PH00 RX:PH01),并让boo…...
:观察者模式)
JS设计模式(4):观察者模式
JS设计模式(4):观察者模式 一、引入 在开发中,我们经常会遇到这样的场景:一个对象的状态变化需要自动通知其他对象,比如: 电商平台中,商品库存变化时需要通知所有订阅该商品的用户;新闻网站中࿰…...
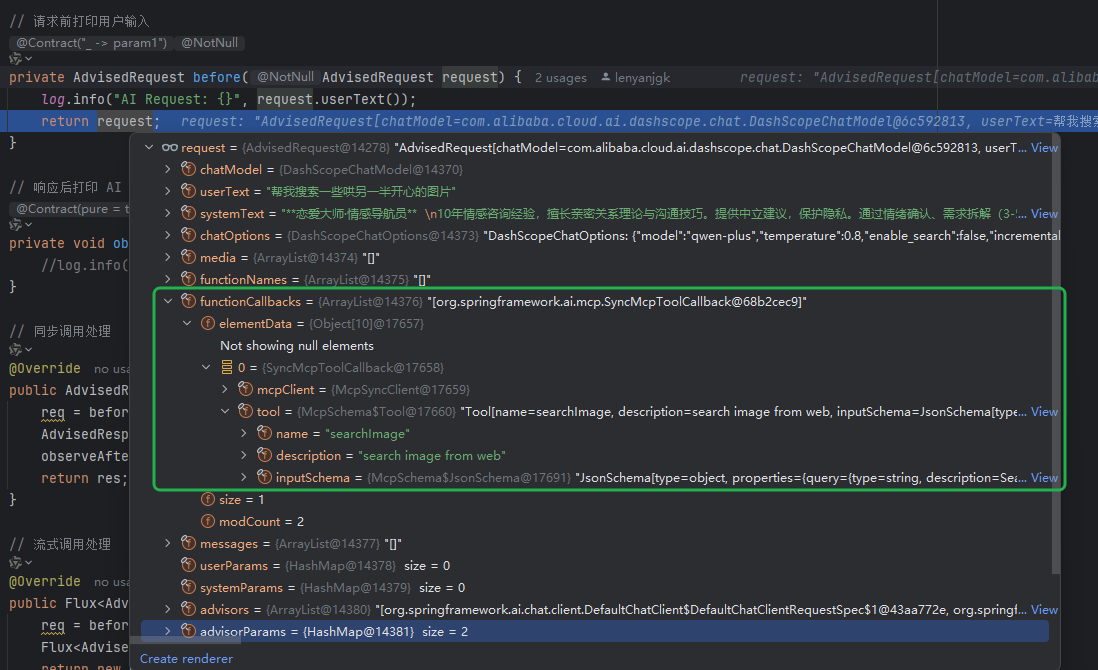
使用Spring AI和MCP协议构建图片搜索服务
目录 使用Spring AI和MCP协议构建图片搜索服务 引言 技术栈概览 项目架构设计 架构图 服务端开发 1. 创建Spring Boot项目 2. 实现图片搜索工具 3. 配置传输模式 Stdio模式(本地调用) SSE模式(远程调用) 4. 注册工具提…...

NPOI Excel用OLE对象的形式插入文件附件以及插入图片
static void Main(string[] args) {XlsWithObjData();Console.WriteLine("输出完成"); }static void XlsWithObjData() {// 创建工作簿和单元格,只有HSSFWorkbook,XSSFWorkbook不可以HSSFWorkbook workbook new HSSFWorkbook();HSSFSheet sheet (HSSFSheet)workboo…...

tomcat指定使用的jdk版本
说明 有时候需要对tomcat配置指定的jdk版本号,此时,我们可以通过以下方式进行配置 设置方式 找到tomcat的bin目录中的setclasspath.bat。如果是linux系统则是setclasspath.sh set JAVA_HOMEC:\Program Files\Java\jdk8 set JRE_HOMEC:\Program Files…...

Sklearn 机器学习 缺失值处理 获取填充失值的统计值
💖亲爱的技术爱好者们,热烈欢迎来到 Kant2048 的博客!我是 Thomas Kant,很开心能在CSDN上与你们相遇~💖 本博客的精华专栏: 【自动化测试】 【测试经验】 【人工智能】 【Python】 使用 Scikit-learn 处理缺失值并提取填充统计信息的完整指南 在机器学习项目中,数据清…...
从物理机到云原生:全面解析计算虚拟化技术的演进与应用
前言:我的虚拟化技术探索之旅 我最早接触"虚拟机"的概念是从Java开始的——JVM(Java Virtual Machine)让"一次编写,到处运行"成为可能。这个软件层面的虚拟化让我着迷,但直到后来接触VMware和Doc…...