目标跟踪算法-卡尔曼滤波详解
卡尔曼滤波是一种递归的优化算法,用于估计一个系统的动态状态,常用于跟踪、导航、时间序列分析等领域。它的关键在于使用一系列测量数据(通常含噪声)来估计系统的真实状态,使得估计值更接近实际情况。卡尔曼滤波器适合在一维或多维的状态空间中跟踪一个随时间变化的系统状态。
一、卡尔曼滤波器的基本概念
卡尔曼滤波器通过一系列测量数据和预测模型,实时地估计系统的状态。它假设系统具有高斯噪声和线性变化,可以用系统的动态模型和测量模型来描述:
- 动态模型:描述系统状态如何从一个时间点转移到下一个时间点。
- 测量模型:描述测量如何反映当前系统状态。
二、卡尔曼滤波的数学模型
卡尔曼滤波器通过两个关键方程来描述系统的状态:
- 状态转移方程:描述当前状态由前一状态的转移关系
- 观测方程:描述测量值如何从当前状态推导而来
假设系统状态向量为 xk,观测值为 zk,则:
1. 状态转移方程
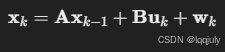
其中:
- A:状态转移矩阵,用于描述系统如何随时间变化。
- B:控制输入矩阵。
- uk:控制向量(可选,通常忽略)。
- wk:过程噪声,服从高斯分布,协方差为 Q。
2. 观测方程
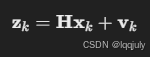
其中:
- H:观测矩阵,描述如何通过状态向量计算观测值。
- vk:测量噪声,服从高斯分布,协方差为 R。
三、卡尔曼滤波器的运算步骤
卡尔曼滤波器主要包括两个阶段:预测和更新。
1. 预测阶段
基于当前状态估计,预测下一时间步的状态和误差协方差。
- 状态预测:

- 误差协方差预测:

2. 更新阶段
一旦获得观测值 zk,便可以通过更新步骤修正预测值,使估计值更接近真实值。
- 计算卡尔曼增益 Kk:

- 状态更新:

- 误差协方差更新:

其中,Kk称为卡尔曼增益,它决定了对观测值的信任程度。如果测量噪声很小,卡尔曼增益将更高,观测值的影响更大;反之则偏重预测值。
四、卡尔曼滤波的物理意义
- 预测步骤:根据上一步的状态来预测当前状态,主要依赖系统的动态模型。
- 更新步骤:根据测量值修正预测结果,使得估计值更接近真实值。
卡尔曼滤波通过在预测和更新之间进行平衡,使得估计结果具有一定的抗噪能力,尤其在高噪声环境下表现出色。
五、卡尔曼滤波的优缺点
优点:
- 高效:卡尔曼滤波通过递归计算,能实时处理数据,适用于嵌入式系统。
- 最优估计:对于线性高斯系统,卡尔曼滤波是最优估计。
缺点:
- 只适用于线性系统:对于非线性系统,需要扩展卡尔曼滤波(EKF)或无迹卡尔曼滤波(UKF)。
- 对噪声模型敏感:如果噪声不满足高斯分布,卡尔曼滤波的效果会显著下降。
六、扩展卡尔曼滤波(EKF)和无迹卡尔曼滤波(UKF)
对于非线性系统,卡尔曼滤波可扩展为EKF或UKF。
- EKF:通过对非线性函数进行一阶线性化来近似计算。
- UKF:使用一组样本点(称为sigma点)来估计非线性函数的状态分布,更适合高度非线性问题。
七、卡尔曼滤波在多目标跟踪中的应用
在多目标跟踪任务中,如物体检测和行人跟踪等,卡尔曼滤波可以用来预测物体在下一帧的位置,以便在视频中连续识别同一个目标。
1. 预测和匹配
- 使用卡尔曼滤波预测目标的状态,包括位置、速度等信息。
- 在新一帧图像中,通过检测算法识别出目标位置,结合卡尔曼滤波的预测结果进行匹配。
2. 处理遮挡
- 当目标被短暂遮挡时,卡尔曼滤波器仍能提供较准确的预测,待目标再次出现后进行更新。
3. 与深度学习结合
在 DeepSORT 等算法中,卡尔曼滤波与深度学习模型结合,通过深度特征辅助数据关联。DeepSORT的基本流程为:
- 目标检测模块生成检测框。
- 卡尔曼滤波预测每个目标的下一位置。
- 利用检测框和卡尔曼滤波预测位置进行匹配,同时使用深度特征辅助匹配,提高多目标跟踪的准确性。
八、应用案例:一维位置预测
假设我们跟踪一个沿直线运动的目标,每秒测量一次其位置,但测量包含噪声。
- 状态向量:
 。
。 - 状态转移矩阵:

- 观测矩阵:

使用卡尔曼滤波,我们可以实时跟踪和预测目标位置,且能在测量误差较大的情况下保持估计的准确性。
九、卡尔曼滤波器来估计物体位置的 Python 示例代码(一维位置预测)
思路:
# 初始化
x = 初始状态 # 初始位置和速度
P = 初始误差协方差 # 通常取较大值
Q = 过程噪声协方差
R = 测量噪声协方差
A = 状态转移矩阵
H = 观测矩阵# 时间步循环
for k in range(1, N):
# 1. 预测步骤
x = A * x # 状态预测
P = A * P * A.T + Q # 协方差预测# 2. 更新步骤(使用观测值 z_k)
K = P * H.T * np.linalg.inv(H * P * H.T + R) # 卡尔曼增益
x = x + K * (z_k - H * x) # 状态更新
P = (I - K * H) * P # 协方差更新
import numpy as npclass KalmanFilter:def __init__(self, process_variance, measurement_variance):# 初始值self.x = 0.0 # 初始位置self.P = 1.0 # 初始估计协方差# 过程和测量噪声的协方差self.process_variance = process_variance # 过程噪声(系统噪声)self.measurement_variance = measurement_variance # 测量噪声def predict(self, u=0.0):# 预测下一状态self.x = self.x + u # 这里假设 u 是控制输入,例如速度self.P = self.P + self.process_variance # 更新预测协方差def update(self, measurement):# 计算卡尔曼增益K = self.P / (self.P + self.measurement_variance)# 更新状态和协方差self.x = self.x + K * (measurement - self.x) # 更新估计值self.P = (1 - K) * self.P # 更新估计误差def get_estimate(self):return self.x# 初始化卡尔曼滤波器
process_variance = 1e-5 # 过程噪声越小,滤波器更信任模型
measurement_variance = 0.1 # 测量噪声越大,滤波器更信任预测
kf = KalmanFilter(process_variance, measurement_variance)# 模拟测量数据(实际应用中可以是传感器数据)
measurements = [1.0, 2.0, 1.2, 2.1, 2.5, 3.0, 2.8, 3.2, 3.1]# 使用卡尔曼滤波器来平滑这些测量数据
for measurement in measurements:kf.predict() # 预测步骤kf.update(measurement) # 更新步骤print(f"测量值: {measurement}, 卡尔曼估计值: {kf.get_estimate()}")
相关文章:
目标跟踪算法-卡尔曼滤波详解
卡尔曼滤波是一种递归的优化算法,用于估计一个系统的动态状态,常用于跟踪、导航、时间序列分析等领域。它的关键在于使用一系列测量数据(通常含噪声)来估计系统的真实状态,使得估计值更接近实际情况。卡尔曼滤波器适合…...

SpringBoot后端开发常用工具详细介绍——application多环境配置与切换
文章目录 引言介绍application.yml(主配置文件)application-dev.yml(开发环境配置)application-test.yml(测试环境配置)application-prod.yml(生产环境配置)激活配置文件参考内容 引…...

php反序列化漏洞典型例题
1.靶场环境 ctfhub-技能树-pklovecloud 引用题目: 2021-第五空间智能安全大赛-Web-pklovecloud 2.过程 2.1源代码 启动靶场环境,访问靶场环境,显示源码:直接贴在下面: <?php include flag.php; class pks…...

浅析Android View绘制过程中的Surface
前言 在《浅析Android中View的测量布局流程》中我们对VSYNC信号到达App进程之后开启的View布局过程进行了分析,经过对整个App界面的View树进行遍历完成了测量和布局,确定了View的大小以及在屏幕中所处的位置。但是,如果想让用户在屏幕上看到…...

基于卷积神经网络的大豆种子缺陷识别系统,resnet50,mobilenet模型【pytorch框架+python源码】
更多目标检测和图像分类识别项目可看我主页其他文章 功能演示: 大豆种子缺陷识别系统,卷积神经网络,resnet50,mobilenet【pytorch框架,python源码】_哔哩哔哩_bilibili (一)简介 基于卷积神…...

HarmonyOS项目开发一多简介
目录 一、布局能力概述 二、自适应布局 三、响应式布局 四、典型布局场景 一、布局能力概述 布局决定页面元素排布及显示:在页面设计及开发中,布局能力至关重要,主要通过组件结构来确定使用何种布局。 自适应布局与响应式布局࿱…...

C++基础三
构造函数 构造函数(初始化类成员变量): 1、属于类的成员函数之一 2、构造函数没有返回类型 3、构造函数的函数名必须与类名相同 4、构造函数不允许手动调用(不能通过类对象调用) 5、构造函数在类对象创建时会被自动调用 6、如果没有显示声…...

利用ChatGPT完成2024年MathorCup大数据挑战赛-赛道A初赛:台风预测与分析
利用ChatGPT完成2024年MathorCup大数据挑战赛-赛道A初赛:台风预测与分析 引言 在2024年MathorCup大数据挑战赛中,赛道A聚焦于气象数据分析,特别是台风的生成、路径预测、和降水风速特性等内容。本次比赛的任务主要是建立一个分类评价模型&…...

Linux系统操作篇 one -文件指令及文件知识铺垫
Linux操作系统入门-系统篇 前言 Linux操作系统与Windows和MacOS这些系统不同,Linux是黑屏的操作系统,操作方式使用的是指令和代码行来进行,因此相对于Windows和MacOS这些带有图形化界面的系统,Linux的入门门槛和上手程度要更高&…...

隨筆20241028 ISR 的收缩与扩展及其机制解析
在 Kafka 中,ISR(In-Sync Replicas) 是一组副本,它们与 Leader 保持同步,确保数据一致性。然而,ISR 的大小会因多种因素而变化,包括收缩和扩展。以下是 ISR 收缩与扩展的详细解释及其背后的机制…...

linux-字符串相关命令
1、cut 提取文件每一行中的内容 下面是一些常用的 cut 命令选项的说明: -c, --characters列表:提取指定字符位置的数据。-d, --delimiter分界符:指定字段的分隔符,默认为制表符。-f, --fieldsLIST:提取指定字段的数据…...

ES6 函数的扩展
ES6 之前,不能直接为函数的参数指定默认值,只能采用变通的方法 ES6 允许为函数的参数设置默认值,即直接写在参数定义的后面 参数变量是默认声明的,所以不能用 let 或 const 再次声明 使用参数默认值时,函数不能有同名参…...

Mac 查看占用特定端口、终止占用端口的进程
在 macOS 上,可以使用以下命令来查看占用特定端口(例如 8080)的进程: lsof -i :8080命令说明 lsof:列出打开的文件和网络连接信息。-i :8080:筛选出正在监听 8080 端口的进程。 输出结果结构 执行上述命…...
C#入坑JAVA MyBatis入门 CURD 批量 联表分页查询
本文,分享 MyBatis 各种常用操作,不限于链表查询、分页查询等等。 1. 分页查询 在 下文的 的「3.4 selectPage」小节,我们使用 MyBatis Plus 实现了分页查询。除了这种方式,我们也可以使用 XML 实现分页查询。 这里,…...

RabbitMQ 安装(Windows版本)和使用
安装 安装包获取 可以自己找资源,我这里也有百度云的资源,如果没失效的话可以直接用。 通过百度网盘分享的文件:RabbitMQ 链接:https://pan.baidu.com/s/1rzcdeTIYQ4BqzHLDSwCgyw?pwdfj79 提取码:fj79 安装教程…...

Apache paimon表管理
表管理 2.9.4.1 管理快照 1)快照过期 Paimon Writer每次提交都会生成一个或两个快照。每个快照可能会添加一些新的数据文件或将一些旧的数据文件标记为已删除。然而,标记的数据文件并没有真正被删除,因为Paimon还支持时间旅行到更早的快照。它们仅在快照过期时被删除。 …...

java 第19天
一.Lambda表达式 前提是:参数是函数式接口才可以书写Lambda表达式 函数式接口条件: 1.接口 2.只有一个抽象方法 lambda表达式又称为匿名函数,允许匿名函数以参数的形式传入方法,简化代码 lambda表达式分为两部分()->{} …...

什么是服务器?服务器与客户端的关系?本地方访问不了网址与服务器访问不了是什么意思?有何区别
服务器是一种高性能的计算机,它通过网络为其他计算机(称为客户端)提供服务。这些服务可以包括文件存储、打印服务、数据库服务或运行应用程序等。服务器通常具有强大的处理器、大量的内存和大容量的存储空间,以便能够处理多个客户…...

Spring(1)—Spring 框架:Java 开发者的春天
一、关于Spring 1.1 简介 Spring 框架是一个功能强大的开源框架,主要用于简化 Java 企业级应用的开发,由被称为“Spring 之父”的 Rod Johnson 于 2002 年提出并创立,并由Pivotal团队维护。它提供了全面的基础设施支持,使开发者…...

MT1401-MT1410 码题集 (c 语言详解)
目录 MT1401归并排序 MT1402堆排序 MT1403后3位排序 MT1404小大大小排序 MT1405小大大小排序II MT1406数字重排 MT1407插入 MT1408插入 MT1409旋转数组 MT1410逆时针旋转数组 MT1401归并排序 c 语言实现代码 #include <stdio.h>// merge two subarrays void merge(int a…...

深入解析Linux /var/log/secure中的用户登录异常返回值
1. 从登录日志看系统安全 每次打开Linux系统的/var/log/secure文件,就像翻开一本系统安全的日记本。这个不起眼的日志文件记录了所有用户登录尝试的详细信息,特别是那些失败的登录记录,往往隐藏着系统安全的重要线索。作为系统管理员…...

Mermaid:用文本构建专业图表的开源工具解决方案
Mermaid:用文本构建专业图表的开源工具解决方案 【免费下载链接】mermaid mermaid-js/mermaid: 是一个用于生成图表和流程图的 Markdown 渲染器,支持多种图表类型和丰富的样式。适合对 Markdown、图表和流程图以及想要使用 Markdown 绘制图表和流程图的开…...

LingBot-Depth-ViT-L14在智慧物流中应用:AGV避障深度补全降低LiDAR成本50%
LingBot-Depth-ViT-L14在智慧物流中应用:AGV避障深度补全降低LiDAR成本50% 1. 引言:AGV避障的成本困境与破局思路 如果你在工厂或仓库里见过那些跑来跑去的自动搬运小车(AGV),可能会觉得它们很酷。但你知道吗&#x…...

[DDCTF2018]从FTP/SMTP到TLS:流量分析中的密钥泄露与解密实战
1. 从FTP/SMTP流量中寻找密钥泄露的蛛丝马迹 第一次接触这类流量分析题目时,我完全不知道从哪里入手。看着Wireshark里密密麻麻的数据包,就像面对一堵密不透风的墙。但经过多次实战后,我发现FTP和SMTP这两个传统协议往往就是突破口。 FTP协议…...
)
Vulnhub靶机实战:MERCURY提权全记录(附环境配置避坑指南)
Vulnhub靶机实战:MERCURY渗透全流程与网络配置避坑指南 在网络安全学习过程中,Vulnhub靶机因其丰富的实战场景和多样化的漏洞组合,成为安全爱好者提升技能的绝佳选择。MERCURY作为Vulnhub平台上的一款入门级靶机,虽然难度不高&…...

FLUX.1-dev旗舰版性能对比:与Stable Diffusion 3的基准测试
FLUX.1-dev旗舰版性能对比:与Stable Diffusion 3的基准测试 1. 引言 AI图像生成领域最近迎来了一场重量级对决。Black Forest Labs开源的FLUX.1-dev旗舰版与Stability AI的Stable Diffusion 3,这两个由同一技术团队不同分支打造的模型,究竟…...

从MP模型到BP网络:一文读懂神经网络发展史中的关键突破
从MP模型到BP网络:神经网络进化史中的技术革命 1943年的一个冬日,芝加哥大学的两位年轻科学家沃伦麦卡洛克和沃尔特匹茨可能不会想到,他们在《数学生物物理学通报》上发表的MP模型论文,会成为点燃人工智能革命的星星之火。这场持续…...

【CDA干货】别再死磕 Excel 函数了!5分钟学会数据透视表,轻松搞定多维度数据分析
写公式太烧脑?函数太多记不牢?在日常办公中,我们经常需要对大量数据进行多维度汇总分析——比如统计员工的日均产量、最高产量、最低产量,或是按部门、日期汇总业绩。手动计算不仅耗时费力,还容易出错。其实80%的日常分…...

解锁foobar2000个性化定制:打造沉浸式音乐体验
解锁foobar2000个性化定制:打造沉浸式音乐体验 【免费下载链接】foobox-cn DUI 配置 for foobar2000 项目地址: https://gitcode.com/GitHub_Trending/fo/foobox-cn 在数字音乐时代,一款能够完美贴合个人审美的播放器不仅是工具,更是情…...

上周帮楼下工厂的小兄弟调完这套快递包裹分拣系统,回来翻了翻当时记的潦草笔记,今天干脆整理出来唠唠,省得后面又有人踩同样的坑
S7-200 PLC和组态王货物分拣快递分拣分选包裹 物料分拣 我们主要的后发送的产品有,带解释的梯形图接线图原理图图纸,io分配,组态画面其实就是车间里的小传送带,过来的包裹分三类:普通件、易碎件、大件,用…...