【CUDA代码实践03】m维网格n维线程块对二维矩阵的索引
文章目录
- 一、数据存储方式
- 二、二维网格二维线程块
- 三、二维网格一维线程块
- 四、一维网格一维线程块
为了方便下次找到文章,也方便联系我给大家提供帮助,欢迎大家点赞👍、收藏📂和关注🔔!一起讨论技术问题💻,一起学习成长📚!如果你有任何问题或想法,随时留言,我会尽快回复哦😊!
近年来,人工智能(AI)技术,尤其是大模型的快速发展,打开了全新的时代大门。对于想要在这个时代迅速成长并提升自身能力的个人而言,学会利用AI辅助学习已经成为一种趋势。不论是国内的文心一言、豆包,还是国外的ChatGPT、Claude,它们都能成为我们编程学习的有力助手。利用AI进行编程学习将大大提升自己的编程学习效率,这里给大家推荐一个我自己在用的集成ChatGPT和Claude的网站(国内可用,站点稳定):传送门
抓住AI时代每一个机会,加速自己成长,提高自己的核心价值!
一、数据存储方式
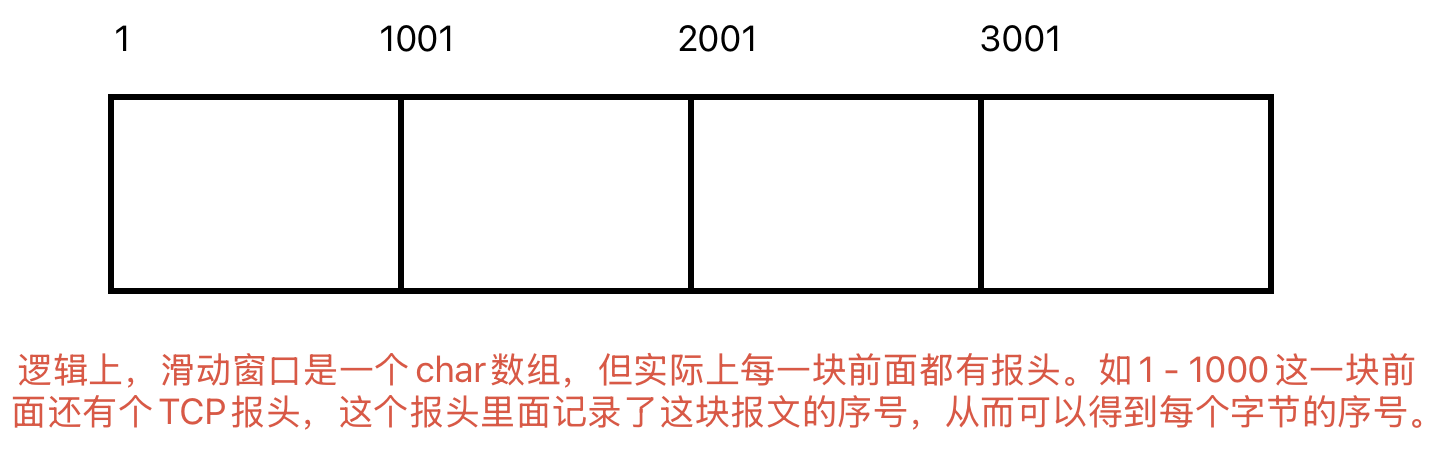
- 数据在内存中是以线性、以行为主的方式存储
- 本篇文章中,16x8的二维数组,在内存中一段连续的128个地址存储该数组

代码结构

先放上头文件及main文件
common.cuh
#ifndef COMMON_CUH
#define COMMON_CUH#include "cuda_runtime.h"
#include <stdio.h>// 声明外部函数,它们将在其他文件中实现。
// 这些函数定义了 CUDA 的网格和块结构,分别表示
// 2维网格和2维线程块、2维网格和1维线程块、1维网格和1维线程块。
extern void grid2D_block2D();
extern void grid2D_block1D();
extern void grid1D_block1D();// ErrorCheck 是一个内联函数,用于检查 CUDA 函数的返回错误码。
// 如果有错误发生,它将打印错误代码、错误名称、错误描述、文件名和行号。
// 此函数的目的是帮助调试 CUDA 错误。
inline cudaError_t ErrorCheck(cudaError_t error_code, const char* filename, int lineNumber) {if (error_code != cudaSuccess) {printf("CUDA error:\ncode=%d, name=%s, description=%s\nfile=%s,line=%d\n",error_code, cudaGetErrorName(error_code), cudaGetErrorString(error_code), filename, lineNumber);return error_code; // 返回错误码以便调用方了解错误情况。}return error_code; // 如果没有错误,返回相同的错误码。
}// setGPU 是一个内联函数,用于设置 GPU 设备。
// 它首先获取系统中可用的 CUDA 兼容 GPU 数量。
// 如果没有找到可用的 GPU,程序将退出,否则设置设备并显示相应信息。
inline void setGPU() {int iDeviceCount = 0; // 存储系统中可用 GPU 的数量// 获取设备数量并检查返回的错误码。cudaError_t error = ErrorCheck(cudaGetDeviceCount(&iDeviceCount), __FILE__, __LINE__);// 如果没有 GPU 或发生错误,则终止程序。if (error != cudaSuccess || iDeviceCount == 0) {printf("No CUDA compatible GPU found\n");exit(-1); // 返回非零值,表示错误。} else {printf("The count of GPUs is %d.\n", iDeviceCount); // 显示找到的 GPU 数量。}// 设置设备 ID 为 0 的 GPUint iDevice = 0;error = ErrorCheck(cudaSetDevice(iDevice), __FILE__, __LINE__);if (error != cudaSuccess) {printf("cudaSetDevice failed!\n");exit(-1); // 设置失败时终止程序。} else {printf("cudaSetDevice success!\n"); // 成功设置 GPU 后的确认信息。}
}#endif // COMMON_CUH
main.cu
#include "cuda_runtime.h"
#include <stdio.h>
#include "./common.cuh" // 包含自定义的通用 CUDA 工具,例如 setGPU 和 ErrorCheckint main() {// grid2D_block2D(); // 使用 2维网格和 2维线程块的函数,已注释掉// grid2D_block1D(); // 使用 2维网格和 1维线程块的函数,已注释掉grid1D_block1D(); // 使用 1维网格和 1维线程块的函数,执行矩阵加法return 0; // 返回 0 表示程序执行成功
}
二、二维网格二维线程块
二维网格和二维线程块对二维矩阵进行索引,每个线程可负责一个矩阵元素的计算任务


//
// Created by Administrator on 2024/10/25.
//
#include "common.cuh"// 定义一个 CUDA 内核函数 addMatrix,用于对两个矩阵进行元素逐一相加。
// A、B 是输入矩阵,C 是输出矩阵,nx 和 ny 分别是矩阵的列数和行数。
__global__ void addMatrix(int *A, int *B, int *C, const int nx, const int ny) {int ix = blockIdx.x * blockDim.x + threadIdx.x; // 确定线程在 x 方向上的索引int iy = blockIdx.y * blockDim.y + threadIdx.y; // 确定线程在 y 方向上的索引unsigned int idx = iy * nx + ix; // 计算该线程对应矩阵中的一维索引// 仅当索引在矩阵范围内时执行加法运算,以避免越界访问if (ix < nx && iy < ny) {C[idx] = A[idx] + B[idx];}
}// 定义一个函数 grid2D_block2D 来设置并调用 CUDA 内核
// 该函数配置并使用二维网格和二维块结构
void grid2D_block2D(void) {setGPU(); // 设置 GPU// 初始化矩阵大小和字节数int nx = 16; // 列数int ny = 8; // 行数int nxy = nx * ny; // 矩阵元素总数size_t stBytesCount = nxy * sizeof(int); // 矩阵所需的总字节数// 在主机(CPU)上分配内存int *ipHost_A, *ipHost_B, *ipHost_C;ipHost_A = (int *)malloc(stBytesCount); // 矩阵 AipHost_B = (int *)malloc(stBytesCount); // 矩阵 BipHost_C = (int *)malloc(stBytesCount); // 矩阵 C// 初始化 A 和 B 的值,C 初始化为零if (ipHost_A != NULL && ipHost_B != NULL && ipHost_C != NULL) {for (int i = 0; i < nxy; i++) {ipHost_A[i] = i; // 矩阵 A 的元素值设为 iipHost_B[i] = i + 1; // 矩阵 B 的元素值设为 i+1}memset(ipHost_C, 0, stBytesCount); // 矩阵 C 的元素初始化为 0}else {printf("fail to malloc memory.\n");exit(-1); // 如果内存分配失败,退出程序}// 在设备(GPU)上分配内存int *ipDevice_A, *ipDevice_B, *ipDevice_C;ErrorCheck(cudaMalloc((int **)&ipDevice_A, stBytesCount), __FILE__, __LINE__);ErrorCheck(cudaMalloc((int **)&ipDevice_B, stBytesCount), __FILE__, __LINE__);ErrorCheck(cudaMalloc((int **)&ipDevice_C, stBytesCount), __FILE__, __LINE__);if (ipDevice_A != NULL && ipDevice_B != NULL && ipDevice_C != NULL) {// 将 A 和 B 从主机复制到设备ErrorCheck(cudaMemcpy(ipDevice_A, ipHost_A, stBytesCount, cudaMemcpyHostToDevice), __FILE__, __LINE__);ErrorCheck(cudaMemcpy(ipDevice_B, ipHost_B, stBytesCount, cudaMemcpyHostToDevice), __FILE__, __LINE__);ErrorCheck(cudaMemcpy(ipDevice_C, ipHost_C, stBytesCount, cudaMemcpyHostToDevice), __FILE__, __LINE__);}else {printf("fail to malloc memory.\n");free(ipHost_A);free(ipHost_B);free(ipHost_C);exit(-1); // 如果设备内存分配失败,退出程序}// 设置线程块和网格维度dim3 block(4, 4); // 定义每个块的尺寸(4x4 线程块)dim3 grid((nx + block.x - 1) / block.x, (ny + block.y - 1) / block.y); // 定义网格尺寸printf("Thread config : grid (%d, %d) block (%d, %d)\n", grid.x, grid.y, block.x, block.y);// 启动 CUDA 内核addMatrix<<<grid, block>>>(ipDevice_A, ipDevice_B, ipDevice_C, nx, ny);ErrorCheck(cudaDeviceSynchronize(), __FILE__, __LINE__);// 将结果从设备复制回主机ErrorCheck(cudaMemcpy(ipHost_C, ipDevice_C, stBytesCount, cudaMemcpyDeviceToHost), __FILE__, __LINE__);// 输出前 10 个元素的加法结果,验证计算是否正确for (int i = 0; i < 10; i++) {printf("idx=%2d\tmatrix_A:%d\tmatrix_B:%d\tresult=%d\n", i + 1, ipHost_A[i], ipHost_B[i], ipHost_C[i]);}// 释放主机和设备上的内存free(ipHost_A);free(ipHost_B);free(ipHost_C);ErrorCheck(cudaFree(ipDevice_A), __FILE__, __LINE__);ErrorCheck(cudaFree(ipDevice_B), __FILE__, __LINE__);ErrorCheck(cudaFree(ipDevice_C), __FILE__, __LINE__);ErrorCheck(cudaDeviceReset(), __FILE__, __LINE__);return;
}
三、二维网格一维线程块
二维网格和一维线程块对二维矩阵进行索引
每个线程可负责一个矩阵元素的计算任务
与二维网格二维线程块的情况极为相似



//
// Created by Administrator on 2024/10/25.
//
#include "common.cuh"// 定义一个 CUDA 内核函数 addMatrix_21D,用于执行矩阵相加操作。
// 与标准的 2维线程块不同,此内核使用 2维网格和 1维线程块配置。
// A、B 是输入矩阵,C 是输出矩阵,nx 和 ny 分别是矩阵的列数和行数。
__global__ void addMatrix_21D(int *A, int *B, int *C, const int nx, const int ny)
{int ix = blockIdx.x * blockDim.x + threadIdx.x; // 计算线程在 x 方向上的索引int iy = threadIdx.y; // 线程在 y 方向上的索引unsigned int idx = iy * nx + ix; // 将二维索引转换为一维索引// 仅在索引位于矩阵范围内时执行加法操作,避免越界访问if (ix < nx && iy < ny){C[idx] = A[idx] + B[idx];}
}// 定义一个函数 grid2D_block1D 来配置并调用 CUDA 内核。
// 该函数使用二维网格和一维块的配置。
void grid2D_block1D(void)
{setGPU(); // 设置 GPU 设备// 设置矩阵的尺寸int nx = 16; // 矩阵列数int ny = 8; // 矩阵行数int nxy = nx * ny; // 矩阵总元素数size_t stBytesCount = nxy * sizeof(int); // 矩阵所需的总字节数// 在主机(CPU)上分配内存int *ipHost_A, *ipHost_B, *ipHost_C;ipHost_A = (int *)malloc(stBytesCount); // 分配矩阵 A 的内存ipHost_B = (int *)malloc(stBytesCount); // 分配矩阵 B 的内存ipHost_C = (int *)malloc(stBytesCount); // 分配结果矩阵 C 的内存// 初始化矩阵 A 和 B 的数据if(ipHost_A != NULL && ipHost_B != NULL && ipHost_C != NULL){for(int i = 0; i < nxy; i++){ipHost_A[i] = i; // A 的每个元素为 iipHost_B[i] = i + 1; // B 的每个元素为 i+1}} else {printf("fail to malloc memory.\n");exit(-1); // 如果内存分配失败,退出程序}// 在设备(GPU)上分配内存int *ipDevice_A, *ipDevice_B, *ipDevice_C;ErrorCheck(cudaMalloc((int **)&ipDevice_A, stBytesCount), __FILE__, __LINE__);ErrorCheck(cudaMalloc((int **)&ipDevice_B, stBytesCount), __FILE__, __LINE__);ErrorCheck(cudaMalloc((int **)&ipDevice_C, stBytesCount), __FILE__, __LINE__);if(ipDevice_A != NULL && ipDevice_B != NULL && ipDevice_C != NULL){// 将主机内存复制到设备ErrorCheck(cudaMemcpy(ipDevice_A, ipHost_A, stBytesCount, cudaMemcpyHostToDevice), __FILE__, __LINE__);ErrorCheck(cudaMemcpy(ipDevice_B, ipHost_B, stBytesCount, cudaMemcpyHostToDevice), __FILE__, __LINE__);ErrorCheck(cudaMemcpy(ipDevice_C, ipHost_C, stBytesCount, cudaMemcpyHostToDevice), __FILE__, __LINE__);} else {// 如果分配失败,释放内存并退出程序free(ipHost_A);free(ipHost_B);free(ipHost_C);exit(-1);}// 定义线程块和网格的尺寸dim3 block(4); // 每个块有 4 个线程dim3 grid((nx + block.x - 1) / block.x, (ny + block.y - 1) / block.y); // 配置网格尺寸printf("Thread config: grid (%d, %d), block(%d, %d).\n", grid.x, grid.y, block.x, block.y);// 启动 CUDA 内核addMatrix_21D<<<grid, block>>>(ipDevice_A, ipDevice_B, ipDevice_C, nx , ny);ErrorCheck(cudaDeviceSynchronize(), __FILE__, __LINE__);// 将结果从设备复制回主机ErrorCheck(cudaMemcpy(ipHost_C, ipDevice_C, stBytesCount, cudaMemcpyDeviceToHost), __FILE__, __LINE__);// 输出前 10 个元素的加法结果,进行验证for(int i = 0; i < 10; i++){printf("idx=%2d\tmatrix_A:%d\tmatrix_B:%d\tresult=%d\n", i + 1, ipHost_A[i], ipHost_B[i], ipHost_C[i]);}// 释放主机和设备上的内存free(ipHost_A);free(ipHost_B);free(ipHost_C);ErrorCheck(cudaFree(ipDevice_A), __FILE__, __LINE__);ErrorCheck(cudaFree(ipDevice_B), __FILE__, __LINE__);ErrorCheck(cudaFree(ipDevice_C), __FILE__, __LINE__);ErrorCheck(cudaDeviceReset(), __FILE__, __LINE__);return;
}四、一维网格一维线程块
一维网格和一维线程块对二维矩阵进行索引
每个线程负责矩阵一列的运算
编写核函数时,需要使用循环


//
// Created by Administrator on 2024/10/28.
//
#include "common.cuh"// 定义一个 CUDA 内核函数 addMatrix_11D,使用 1D 网格和 1D 块来执行矩阵相加。
// A、B 是输入矩阵,C 是输出矩阵,nx 和 ny 分别是矩阵的列数和行数。
__global__ void addMatrix_11D(int *A, int *B, int *C, const int nx, const int ny)
{int ix = blockIdx.x * blockDim.x + threadIdx.x; // 计算线程在 x 方向的索引// 确保索引在矩阵范围内if (ix < nx){// 在 y 方向上循环遍历for (int iy = 0; iy < ny; iy++){unsigned int idx = iy * nx + ix; // 将二维索引转换为一维索引C[idx] = A[idx] + B[idx]; // 将 A 和 B 对应位置相加并存储在 C 中}}
}// 定义一个函数 grid1D_block1D 来配置并调用 CUDA 内核,使用 1D 网格和 1D 块
void grid1D_block1D(void)
{printf("grid1D_block1D\n");setGPU(); // 设置 GPU 设备// 定义矩阵的尺寸int nx = 16; // 矩阵的列数int ny = 8; // 矩阵的行数int nxy = nx * ny; // 矩阵的总元素数size_t stBytesCount = nxy * sizeof(int); // 矩阵所需的总字节数// 在主机(CPU)上分配内存int *ipHost_A, *ipHost_B, *ipHost_C;ipHost_A = (int *)malloc(stBytesCount); // 分配矩阵 A 的内存ipHost_B = (int *)malloc(stBytesCount); // 分配矩阵 B 的内存ipHost_C = (int *)malloc(stBytesCount); // 分配结果矩阵 C 的内存// 初始化矩阵 A 和 B 的数据if(ipHost_A != NULL && ipHost_B != NULL && ipHost_C != NULL){for(int i = 0; i < nxy; i++){ipHost_A[i] = i; // 矩阵 A 的元素设为 iipHost_B[i] = i + 1; // 矩阵 B 的元素设为 i+1}} else {printf("fail to malloc memory.\n");exit(-1); // 如果分配失败,退出程序}// 在设备(GPU)上分配内存int *ipDevice_A, *ipDevice_B, *ipDevice_C;ErrorCheck(cudaMalloc((int **)&ipDevice_A, stBytesCount), __FILE__, __LINE__);ErrorCheck(cudaMalloc((int **)&ipDevice_B, stBytesCount), __FILE__, __LINE__);ErrorCheck(cudaMalloc((int **)&ipDevice_C, stBytesCount), __FILE__, __LINE__);if(ipDevice_A != NULL && ipDevice_B != NULL && ipDevice_C != NULL){// 将主机内存复制到设备ErrorCheck(cudaMemcpy(ipDevice_A, ipHost_A, stBytesCount, cudaMemcpyHostToDevice), __FILE__, __LINE__);ErrorCheck(cudaMemcpy(ipDevice_B, ipHost_B, stBytesCount, cudaMemcpyHostToDevice), __FILE__, __LINE__);} else {// 如果分配失败,释放内存并退出程序free(ipHost_A);free(ipHost_B);free(ipHost_C);exit(-1);}// 设置线程块和网格的尺寸dim3 block(4); // 每个块包含 4 个线程dim3 grid((nx + block.x - 1) / block.x); // 设置 1D 网格的维度printf("Thread config: grid (%d, %d), block(%d, %d).\n", grid.x, grid.y, block.x, block.y);// 启动 CUDA 内核addMatrix_11D<<<grid, block>>>(ipDevice_A, ipDevice_B, ipDevice_C, nx , ny);ErrorCheck(cudaDeviceSynchronize(), __FILE__, __LINE__);// 将结果从设备复制回主机ErrorCheck(cudaMemcpy(ipHost_C, ipDevice_C, stBytesCount, cudaMemcpyDeviceToHost), __FILE__, __LINE__);// 输出前 10 个元素的加法结果,验证计算正确性for(int i = 0; i < 10; i++){printf("idx=%2d\tmatrix_A:%d\tmatrix_B:%d\tresult=%d\n", i + 1, ipHost_A[i], ipHost_B[i], ipHost_C[i]);}// 释放主机和设备上的内存free(ipHost_A);free(ipHost_B);free(ipHost_C);ErrorCheck(cudaFree(ipDevice_A), __FILE__, __LINE__);ErrorCheck(cudaFree(ipDevice_B), __FILE__, __LINE__);ErrorCheck(cudaFree(ipDevice_C), __FILE__, __LINE__);ErrorCheck(cudaDeviceReset(), __FILE__, __LINE__);return;
}相关文章:
【CUDA代码实践03】m维网格n维线程块对二维矩阵的索引
文章目录 一、数据存储方式二、二维网格二维线程块三、二维网格一维线程块四、一维网格一维线程块 为了方便下次找到文章,也方便联系我给大家提供帮助,欢迎大家点赞👍、收藏📂和关注🔔!一起讨论技术问题&am…...

VSCode Qt6安装OpenSSL
报错 Could NOT find OpenSSL, try to set the path to OpenSSL root folder in thesystem variable OPENSSL_ROOT_DIR (missing: OPENSSL_CRYPTO_LIBRARYOPENSSL_INCLUDE_DIR SSL Crypto) (Required is at least version "3.0")问题确认 这个错误显示在Windows环境…...

JAVA学习-练习试用Java实现“定义一个用户类,包含用户名和密码”
问题: 定义一个用户类(User),包含用户名(username)和密码(password)属性,提供静态方法验证密码是否有效(长度至少为6),并提供getter和…...

大数据之VIP(Virtual IP,虚拟IP)负载均衡
VIP(Virtual IP,虚拟IP)负载均衡是一种在计算机网络中常用的技术,用于将网络请求流量均匀地分散到多个服务器上,以提高系统的可扩展性、可靠性和性能。以下是对VIP负载均衡的详细解释: 一、VIP负载均衡的基…...

鸿蒙网络编程系列38-Web组件文件下载示例
1. web组件文件下载能力简介 在本系列的第22篇文章,介绍了web组件的文件上传能力,同样的,web组件也具备文件下载能力,鸿蒙API提供了处理web组件下载事件的委托类型WebDownloadDelegate,该类型包括四个下载事件的回调接…...

Cisco Packet Tracer 8.0 路由器的基本配置和Telnet设置
文章目录 构建拓扑图配置IP地址配置路由器命令说明测试效果 构建拓扑图 1,添加2811路由器。 2,添加pc0。 3,使用交叉线连接路由器和pc(注意线路端口)。 4,使用配置线连接路由器和pc(注意线路…...

Flink系列之:学习理解通过状态快照实现容错
Flink系列之:学习理解通过状态快照实现容错 状态后端检查点存储状态快照状态快照如何工作?确保精确一次(exactly once)端到端精确一次 状态后端 由 Flink 管理的 keyed state 是一种分片的键/值存储,每个 keyed state…...

Linux 读者写者模型
1.背景概念 在编写多线程的时候,有一种情况是十分常见的。那就是,有些公共数据修改的机会比较少。相比较改写,它们读的机会反而高的多。这样就衍生出了读者写者模型,在这个模型中,有两类线程:读者和写者。读…...

JavaScript 的 axios 实现文件下载功能
用 JavaScript 的 axios 实现文件下载功能,咱们要分几个步骤来搞定它!最主要的部分是处理 二进制数据,可以生成一个进度检测,然后把它保存为文件。 文件名的获取二进制数据获取创建下载链接 const axios require(axios);const g…...

合合信息亮相2024中国模式识别与计算机视觉大会,用AI构建图像内容安全防线
近日,第七届中国模式识别与计算机视觉大会(简称“PRCV 2024”)在乌鲁木齐举办。大会由中国自动化学会(CAA)、中国图象图形学学会(CSIG)、中国人工智能学会(CAAI)和中国计…...

深度学习:匿名函数lambda函数的使用与numerical_gradient函数
背景: 假设我们有一个简单的线性回归模型,其损失函数是均方误差(MSE): class LinearModel:def __init__(self):self.W np.random.randn(1, 1) # 初始化权重def predict(self, x):return np.dot(x, self.W) # 线性预…...

PHP数据类型
几种常用的数据类型: String(字符串) Integer(整型) Float(浮点型) Boolean(布尔型) NULL(空值) Array(数组) Obje…...

2FA-双因素认证
双因素认证(2FA,Two-Factor Authentication)是一种提高安全性的方法,要求用户在登录或进行某些敏感操作时提供两种不同类型的身份验证信息。这种方法通过引入第二层验证,增加了账户被未经授权访问的难度。 项目结构 …...

解决 Python 中的 TypeError 错误
解决 Python 中的 TypeError 错误 在 Python 编程中,TypeError 是一种常见的错误,通常发生在尝试对不兼容的类型进行操作时。了解这个错误的原因以及如何有效解决它,对于提高代码的可靠性和可读性至关重要。本文将详细讨论 TypeError 的成因…...

快速学会C 语言基本概念和语法结构
😀前言 本篇博文是关于C 语言的基本概念和语法结构,希望你能够喜欢 🏠个人主页:晨犀主页 🧑个人简介:大家好,我是晨犀,希望我的文章可以帮助到大家,您的满意是我的动力&a…...

Python酷库之旅-第三方库Pandas(172)
目录 一、用法精讲 791、pandas.UInt8Dtype类 791-1、语法 791-2、参数 791-3、功能 791-4、返回值 791-5、说明 791-6、用法 791-6-1、数据准备 791-6-2、代码示例 791-6-3、结果输出 792、pandas.UInt16Dtype类 792-1、语法 792-2、参数 792-3、功能 792-4、…...

Linux系统下minio设置SSL证书进行HTTPS远程连接访问
文章目录 1.配置SSL证书使用HTTPS访问2.MINIO SDK 忽略证书验证3.使用受信任的证书 1.配置SSL证书使用HTTPS访问 生成域名对应的SSL证书,下载Apache版本,我目前只发现Apache这个里面有对应的私钥和证书 私钥重命名为private.key证书重命名为public.crt&…...

npm 包的命名空间介绍,以及@typescript-eslint/typescript-eslint
npm 包的命名空间是一个重要的概念,用于组织和管理相关的包。通过命名空间,开发者可以避免命名冲突、增强包的可读性和可维护性。以下是关于 npm 命名空间的详细介绍,并以 typescript-eslint 作为示例。 1. 命名空间的结构 命名空间的格式为…...

ecovadis评估是什么,有什么提成自己评分等级
EcoVadis评估是一个企业社会责任(CSR)评级平台,旨在评估全球供应链的可持续性和道德情况。以下是对EcoVadis评估的详细介绍以及提升其评分等级的方法: 一、EcoVadis评估概述 定义:EcoVadis评估通过一系列框架评估公司…...

Vue3中ref、toRef和toRefs之间有什么区别?
前言 Vue 3 引入了组合式 API,其中 ref、toRef 和 toRefs 是处理响应式数据的核心工具。作为高级计算机工程师,我们有必要深入理解这些工具的细微差别,以便在实际项目中更加高效地管理状态。本文将详细解析 ref、toRef 和 toRefs 的区别&…...
Linux相关概念和易错知识点(42)(TCP的连接管理、可靠性、面临复杂网络的处理)
目录 1.TCP的连接管理机制(1)三次握手①握手过程②对握手过程的理解 (2)四次挥手(3)握手和挥手的触发(4)状态切换①挥手过程中状态的切换②握手过程中状态的切换 2.TCP的可靠性&…...

前端导出带有合并单元格的列表
// 导出async function exportExcel(fileName "共识调整.xlsx") {// 所有数据const exportData await getAllMainData();// 表头内容let fitstTitleList [];const secondTitleList [];allColumns.value.forEach(column > {if (!column.children) {fitstTitleL…...
深入理解JavaScript设计模式之单例模式
目录 什么是单例模式为什么需要单例模式常见应用场景包括 单例模式实现透明单例模式实现不透明单例模式用代理实现单例模式javaScript中的单例模式使用命名空间使用闭包封装私有变量 惰性单例通用的惰性单例 结语 什么是单例模式 单例模式(Singleton Pattern&#…...

如何为服务器生成TLS证书
TLS(Transport Layer Security)证书是确保网络通信安全的重要手段,它通过加密技术保护传输的数据不被窃听和篡改。在服务器上配置TLS证书,可以使用户通过HTTPS协议安全地访问您的网站。本文将详细介绍如何在服务器上生成一个TLS证…...

MySQL中【正则表达式】用法
MySQL 中正则表达式通过 REGEXP 或 RLIKE 操作符实现(两者等价),用于在 WHERE 子句中进行复杂的字符串模式匹配。以下是核心用法和示例: 一、基础语法 SELECT column_name FROM table_name WHERE column_name REGEXP pattern; …...

【C++从零实现Json-Rpc框架】第六弹 —— 服务端模块划分
一、项目背景回顾 前五弹完成了Json-Rpc协议解析、请求处理、客户端调用等基础模块搭建。 本弹重点聚焦于服务端的模块划分与架构设计,提升代码结构的可维护性与扩展性。 二、服务端模块设计目标 高内聚低耦合:各模块职责清晰,便于独立开发…...
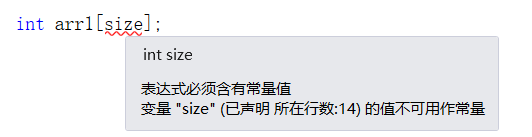
C++使用 new 来创建动态数组
问题: 不能使用变量定义数组大小 原因: 这是因为数组在内存中是连续存储的,编译器需要在编译阶段就确定数组的大小,以便正确地分配内存空间。如果允许使用变量来定义数组的大小,那么编译器就无法在编译时确定数组的大…...
 + 力扣解决)
LRU 缓存机制详解与实现(Java版) + 力扣解决
📌 LRU 缓存机制详解与实现(Java版) 一、📖 问题背景 在日常开发中,我们经常会使用 缓存(Cache) 来提升性能。但由于内存有限,缓存不可能无限增长,于是需要策略决定&am…...
从物理机到云原生:全面解析计算虚拟化技术的演进与应用
前言:我的虚拟化技术探索之旅 我最早接触"虚拟机"的概念是从Java开始的——JVM(Java Virtual Machine)让"一次编写,到处运行"成为可能。这个软件层面的虚拟化让我着迷,但直到后来接触VMware和Doc…...

Appium下载安装配置保姆教程(图文详解)
目录 一、Appium软件介绍 1.特点 2.工作原理 3.应用场景 二、环境准备 安装 Node.js 安装 Appium 安装 JDK 安装 Android SDK 安装Python及依赖包 三、安装教程 1.Node.js安装 1.1.下载Node 1.2.安装程序 1.3.配置npm仓储和缓存 1.4. 配置环境 1.5.测试Node.j…...