SLAM|1. 相机投影及相机畸变
一个能思考的人,才真是一个力量无边的人。——巴尔扎克
本章主要内容:
1.针孔相机模型
2.相机成像的几个坐标系图像
3.畸变及相机标定
本节主要介绍在照相机拍摄过程中,现实物体如何跟照片上的像素关联起来,具体涉及相机成像的物理过程和坐标系转换。
1.1 针孔相机模型
针孔相机模型是目前大多数相机的成像模型,其成像原理为小孔成像,回顾一下按照光线在同一介质中按直线传播的原理,在小孔另一面,会形成倒立按比例缩小的实像。

如果不借助其他东西,这个成像过程会遵循如下原理:小孔越小,成像越好,但会越暗。如下图,小孔直径从2mm变到0.35mm过程,图像越来越清晰,但也越来越暗。

我们想要的照片,是既要清晰,又要有足够的亮度,即让足够的光线进来,捕获到更多的环境细节,为了解决这个问题,现代相机会使用透镜来聚集光线,在保证有较大进光面的同时,让光线也能汇聚到较小范围。

关于透镜,有两个概念:聚焦与失焦
聚焦:从物体不同部分射出的光线,通过镜头之后,聚焦在底片的一个点上,使影像具有清晰的轮廓与真实的质感,这个过程称为聚焦。
失焦:即接收的点的信息未聚焦到一起会导致成像模糊。
注意:物体“聚焦”有特定距离(景深),在景深内可清晰成像,景深外成像模糊。
加入透镜之后,成像规律会有一点变化,此时当物体离透镜不同距离时,会形成不同的像。当物体处于凸透镜的 2 倍焦距之外,会形成倒立的、缩小的实像。一倍焦距到二倍焦距之间,则会形成倒立的、放大的实像。成像物体则在一倍焦距内,成正立的、放大的虚像。
一般地,相机成像时,物体在透镜的二倍焦距之外。而对于投影仪,则会把成像物体放在一倍焦距到二倍焦距之间。对于放大镜,成像物体则在一倍焦距内。

最后,将成像处实像,用感光元件接收后,就形成了拍摄的照片。在比较早的年代,感光元件使用胶片,胶片的原理是通过光产生化学反应来记录。而到了数码时代,感光元件则使用了CCD或者CMOS,其原理是将光转化为模拟电信号来记录。
电子感光元件也叫图像传感器(sensor),分为两种:一种是广泛使用的 CCD(电荷耦合)元件,另一种是 CMOS(互补金属氧化物半导体)器件。其产生的模拟信号,首先经过模拟信号放大器进行信号放大,进而经过数模转换电路(DAC)变为数字图像,数字图像再经过 ISP(Image Signal Processor)图像处理器进行数字图像处理,最后数字图像经过压缩编码算法,存储到 SD 卡中成为一个照片文件。
- CCD
CCD 全称 Charge Coupled Device,它使用一种高感光度的半导体材料制成,由许多感光单位组成,通常以百万像素为单位。当 CCD 表面受到光线照射时,每个感光单位会将电荷反映在组件上,即把光转换为电荷,所有的感光单位所产生的信号加在一起,就构成了一幅完整的画面。 - CMOS
CMOS 全称 Complementary Metal-Oxide Semiconductor,它主要是利用硅和锗这两种元素所做成的半导体,使其在 CMOS 上共存着 N 极和 P 极的半导体,这两个互补效应所产生的电流即可被处理芯片记录为影像。
两者最主要的区别在于:CCD 传感器的图像质量优于 CMOS 传感器,而 CMOS 传感器在成像速度、功耗、价格等方面优于 CCD 传感器。
1.2 相机成像的几个坐标系
要把相机拍摄的照片与实际物体关联起来,就要建立三维世界到二维图像平面的映射关系,这个过程主要通过几个坐标系之间的转换来实现。
1.2.1成像坐标系之间的关系
相机成像的坐标系主要有四个,分别是世界坐标系,相机坐标系,图像坐标系与像素坐标系。世界坐标系下物体的光线(世界坐标系),通过透镜(相机坐标系),投射到感光原件上(图像坐标系),最后计算机在像素坐标系(离散化过程)上做处理。

世界坐标系:用于表示空间物体的绝对坐标,使用(Xw,Yw,Zw)表示,世界坐标系可通过旋转和平移得到相机坐标系。
相机坐标系:以相机的光心为坐标系原点,Xc.Yc轴平行于图像坐标系的x,y轴,相机的光轴为Zc轴,坐标系满足右手法则,相机的光心可理解为相机透镜的几何中心。
图像物理坐标系:坐标原点在CCD图像平面的中心x,y轴分别平行于图像像素坐标系的(u,v)轴,坐标用(x,y)表示。
图像像素坐标系:表示三维空间物体在图像平面上的投影,像素是离散化的,其坐标原点在CCD图像平面的左上角,u轴平行于CCD平面水平向右,v轴垂直于u轴向下,坐标使用(u,v)来表示。图像宽度W,高度H。
1.2.2 坐标计算
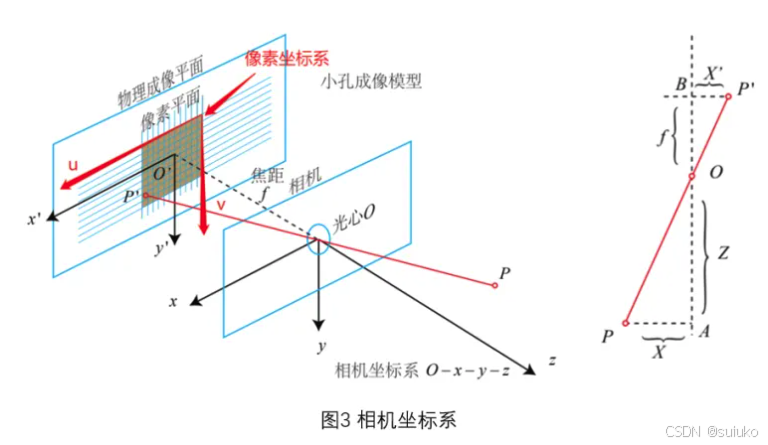
三维坐标投影到成像平面的坐标(完成三维到二维点的映射),可以通过相似三角形得出,对于相机坐标系下的P(X,Y,Z),成像坐标为:
f Z = − X ′ X = − Y ′ Y \frac{f}{Z}=-\frac{X^{\prime}}{X}=-\frac{Y^{\prime}}{Y} Zf=−XX′=−YY′
为了方便运算,取对称的镜像进行计算,效果等价。

f Z = X ′ X = Y ′ Y \frac{f}{Z}=\frac{X^{\prime}}{X}=\frac{Y^{\prime}}{Y} Zf=XX′=YY′
可得:
X ′ = f X Z X^{\prime}=f \frac{X}{Z} X′=fZX
Y ′ = f Y Z Y^{\prime}=f \frac{Y}{Z} Y′=fZY
计算机中的图像,是一个个像素构成,且其并不是图像中心为坐标原点,而是一般把左上角规定为坐标原点,要在计算机中处理图像信息,需要在得到成像平面上的坐标后,把成像坐标,转为像素坐标。

其中O1是投影后的坐标系原点,位于图像中心,而在计算机图像处理库中(如OpenCV),则是定义的左上角O0为图像坐标系原点,横坐标轴为u轴,向右,纵坐标轴为v轴,向下。
相机内感光原件(如cmos)是一个一个小格子拼接而成的,可以认为是离散的,这个小格子可能不是正方形,要将投影坐标P’转化为像素坐标,需要经历如下过程:
计算P’到图像中心的像素距离
u ′ = X ′ α x = f α x X Z = f x X Z u^{\prime}=\frac{X^{\prime}}{\alpha_{x}}=\frac{f}{\alpha_{x}} \frac{X}{Z}=f_{x} \frac{X}{Z} u′=αxX′=αxfZX=fxZX
v ′ = Y ′ α y = f α y Y Z = f y Y Z v^{\prime}=\frac{Y^{\prime}}{\alpha_{y}}=\frac{f}{\alpha_{y}} \frac{Y}{Z}=f_{y} \frac{Y}{Z} v′=αyY′=αyfZY=fyZY
其中f为成像焦距,αx与αy为u,v方向像素的长度。
最后转为O0下的坐标
实现摄像机下三维世界的点到像素平面二维图像平面的点的映射,f为单位米转化为像素的数量,非线性变换如下
u = u ′ + c x = f x X Z + c x u=u^{\prime}+c_{x}=f_{x} \frac{X}{Z}+c_{x} u=u′+cx=fxZX+cx
v = v ′ + c y = f y Y Z + c y v=v^{\prime}+c_{y}=f_{y} \frac{Y}{Z}+c_{y} v=v′+cy=fyZY+cy
引入齐次坐标,改为线性变换,以方便运算
$\left(\begin{array}{ccc}
u \
v \
1
\end{array}\right)=\frac{1}{Z}\left(\begin{array}{ccc}
f_{x} & 0 & c_{x} \
0 & f_{y} & c_{y} \
0 & 0 & 1
\end{array}\right)\left(\begin{array}{c}
X \
Y \
Z
\end{array}\right)=\frac{1}{Z} K P \$
其中
K = ( f x 0 c x 0 f y c y 0 0 1 ) K=\left(\begin{array}{ccc} f_{x} & 0 & c_{x} \\ 0 & f_{y} & c_{y} \\ 0 & 0 & 1 \end{array}\right) K= fx000fy0cxcy1
就是通常所说的相机内参矩阵
通过内参矩阵K,就可以将相机坐标系的下三维的坐标点转换为图像上的二维像素坐标。而对于世界坐标系上的坐标,转换到相机坐标系中则涉及的是不同坐标系中坐标转换,这个会在第二章中进行讲解。
1.3 图像畸变
如果相机成像过程没有畸变,则一个正方形投影成像后,还是一个正方形,但实际情况往往不是这样。大家拍照中可能也会发现,在拍一个人时,可能会把一个脸不大的人,脸拍出来却比较大,这时候不一定是你拍照技术的问题,有可能是因为相机畸变。相机成像过程的图像畸变主要是镜片加工与安装的缺陷造成的。

相机畸变主要由于相机镜头的光学性质造成的。相机镜头中的光线经过折射、反射等多个光学过程,导致不同位置的物体在图像中呈现出不同的形变。这种形变被称为畸变。畸变可以分为两种:径向畸变和切向畸变。
1.3.1 径向畸变
径向畸变来自透镜形状不规则以及建模的方式,导致镜头不同部分焦距不同。光线在远离透镜中心的地方偏折更大(向外偏移远离中心为枕型畸变,左图)或更小(向中心靠拢为桶形畸变,右图)。

下图显示矩形网格因径向畸变而产生的位移。越远离光轴中心的地方,矩形网格上的点偏移越大。

对于径向畸变,常用如下公式进行修正
x corrected = x ( 1 + k 1 r 2 + k 2 r 4 + k 3 r 6 ) y corrected = y ( 1 + k 1 r 2 + k 2 r 4 + k 3 r 6 ) 其中: r 2 = x 2 + y 2 \begin{array}{l} x_{\text {corrected }}=x\left(1+k_{1} r^{2}+k_{2} r^{4}+k_{3} r^{6}\right) \\ y_{\text {corrected }}=y\left(1+k_{1} r^{2}+k_{2} r^{4}+k_{3} r^{6}\right) \end{array} \\ \text { 其中: } r^{2}=x^{2}+y^{2} xcorrected =x(1+k1r2+k2r4+k3r6)ycorrected =y(1+k1r2+k2r4+k3r6) 其中: r2=x2+y2
k1,k2,k3称为径向畸变校正系数。
1.3.2 切向畸变
切向畸变来自于整个摄像机的组装过程。由于透镜制造上的缺陷使得透镜本身与图像平面不平行而产生的,如下图所示。

切向图像畸变使用如下公式进行修正
x corrected = x + [ 2 p 1 x y + p 2 ( r 2 + 2 x 2 ) ] y corrected = y + [ p 1 ( r 2 + 2 y 2 ) + 2 p 2 x y ] 其中 : r 2 = x 2 + y 2 \begin{aligned} x_{\text {corrected }} & =x+\left[2 p_{1} x y+p_{2}\left(r^{2}+2 x^{2}\right)\right] \\ y_{\text {corrected }} & =y+\left[p_{1}\left(r^{2}+2 y^{2}\right)+2 p_{2} x y\right] \end{aligned} \\ 其中: r^{2}=x^{2}+y^{2} xcorrected ycorrected =x+[2p1xy+p2(r2+2x2)]=y+[p1(r2+2y2)+2p2xy]其中:r2=x2+y2
其中 p1,p2为切向畸变系数。
将径向畸变与切向畸变校正,结合在一起,便是常用的畸变校正过程。
x corrected = x ( 1 + k 1 r 2 + k 2 r 4 + k 3 r 6 ) + [ 2 p 1 x y + p 2 ( r 2 + 2 x 2 ) ] y corrected = y ( 1 + k 1 r 2 + k 2 r 4 + k 3 r 6 ) + [ p 1 ( r 2 + 2 y 2 ) + 2 p 2 x y ] 其中 : r 2 = x 2 + y 2 \begin{array}{l} x_{\text {corrected }}=x\left(1+k_{1} r^{2}+k_{2} r^{4}+k_{3} r^{6}\right)+\left[2 p_{1} x y+p_{2}\left(r^{2}+2 x^{2}\right)\right] \\ y_{\text {corrected }}=y\left(1+k_{1} r^{2}+k_{2} r^{4}+k_{3} r^{6}\right)+\left[p_{1}\left(r^{2}+2 y^{2}\right)+2 p_{2} x y\right] \end{array} \\ 其中: r^{2}=x^{2}+y^{2} xcorrected =x(1+k1r2+k2r4+k3r6)+[2p1xy+p2(r2+2x2)]ycorrected =y(1+k1r2+k2r4+k3r6)+[p1(r2+2y2)+2p2xy]其中:r2=x2+y2
等式右边的(x, y)为得到的图像中的理想点,但是存在畸变,于是把其带入等式右边,经过径向和切向变换后,得到左边的畸变校正后的实际点坐标(xcorrected, ycorrected),取出对应颜色值作为(x, y)的颜色值即可。通过去畸变,可以完成图像的矫正,如下图:

1.4* 鱼眼相机模型
鱼眼镜头一般是由十几个不同的透镜组合而成的,在成像的过程中,入射光线经过不同程度的折射,投影到尺寸有限的成像平面上,使得鱼眼镜头与普通镜头相比起来拥有了更大的视野范围。下图表示出了鱼眼相机的一般组成结构。最前面的两个镜头发生折射,使入射角减小,其余的镜头相当于一个成像镜头,这种多元件的构造结构使对鱼眼相机的折射关系的分析变得相当复杂。

1.4.1*鱼眼相机成像模型
研究表明鱼眼相机成像时遵循的模型可以近似为单位球面投影模型。可以将鱼眼相机的成像过程分解成两步:第一步,三维空间点线性地投影到一个球面上,它是一个虚拟的单位球面,它的球心与相机坐标系的原点重合;第二步,单位球面上的点投影到图像平面上,这个过程是非线性的。下图表示出了鱼眼相机的成像过程。

我们知道,普通相机成像遵循的是针孔相机模型,在成像过程中实际场景中的直线仍被投影为图像平面上的直线。但是鱼眼相机如果按照针孔相机模型成像的话,投影图像会变得非常大,当相机视场角达到180°时,图像甚至会变为无穷大。所以,鱼眼相机的投影模型为了将尽可能大的场景投影到有限的图像平面内,允许了相机畸变的存在。并且由于鱼眼相机的径向畸变非常严重,所以鱼眼相机主要的是考虑径向畸变,而忽略其余类型的畸变。
1.4.2* 鱼眼相机投影函数
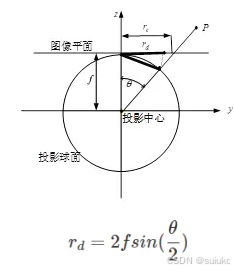
为了将尽可能大的场景投影到有限的图像平面内,鱼眼相机会按照一定的投影函数来设计。根据投影函数的不同,鱼眼相机的设计模型大致能被分为四种:等距投影模型、等立体角投影模型、正交投影模型和体视投影模型。下面的四种鱼眼相机的投影模型反映出了空间中的一点P是如何投影到球面上,然后到图像平面上成像的。
1、等距投影模型

上述式子中,rd表示鱼眼图像中的点到畸变中心的距离,是鱼眼相机的焦距,是入射光线与鱼眼相机光轴之间的夹角,即入射角。
2、等立体角投影模型
3、正交投影模型

4、体视投影模型

本章小结
本节以针孔相机模型作为基本模型,简要介绍了相机成像原理,相机模型中的几个坐标系及相机的畸变及相机标定的方法。最后鱼眼相机模型作为扩展介绍。
通过相机标定,可以获得相机内参及畸变系数,这解决了相机坐标系,图像坐标系,像素坐标系之间的转换过程,属于投影过程。而世界坐标系到相机坐标系之间的转换,则涉及到不同坐标系之间的空间转换,这部分涉及的参数为外参,这部分内容在下节进行讲解。
本章思考
1.叙述相机内参的物理意义。如果一部相机的分辨率变为原来的两倍而其他地方不变,那么它的内参将如何变化?
注:分辨率在不同场合意义不尽相同,这里取传感器的总的感光单元数量作为分辨率,而一些资料中会以某边排列的感光元件数量作为分辨率。在底片面积不变的情况下,分辨率变为原来两倍,指感光单元数量变为原来两倍。如1200w像素变为2400w像素。
2.调研全局快门(global shutter)相机和卷帘快门(rolling shutter)相机的异同。它们在SLAM中有何优缺点?
附录
1.1相机内参标定简介
到目前为止,相机成像有两大转换过程,相机投影及畸变消除,主要由:
K = ( f x 0 c x 0 f y c y 0 0 1 ) K=\left(\begin{array}{ccc} f_{x} & 0 & c_{x} \\ 0 & f_{y} & c_{y} \\ 0 & 0 & 1 \end{array}\right) K= fx000fy0cxcy1
内参矩阵以及畸变参数:Distortioncoefficients=(k1,k2,k3, p1,p2),这两种参数来决定。而求出这两类参数的过程,就是相机标定,目前相机常用的方法是借助棋盘格标定板,在相机前面拿着标定板上下左右前后移动,然后借助标定算法来求出以上参数,常用的标定算法有张正友标定法。
1.2 相机内参标定工具
1.2.1 OpenCV
OpenCV是一款广泛使用的计算机视觉库,其中包含相机内参标定的相关函数。在OpenCV中,使用calibrateCamera函数进行相机内参标定,该函数使用棋盘格等标定板,通过对标定板拍摄的多幅图像进行处理,得出相机的内参参数。OpenCV还提供了相关的可视化工具,如drawChessboardCorners函数,用于显示标定板的角点,以及projectPoints函数,用于将3D点投影到2D图像平面上。
- 循环读取图片
- 使用findChessboardCorners函数检测角点(需提前输入角点数)
- 使用find4QuadCornerSubpix函数对角点进行亚像素精确化
- 可用drawChessboardCorners将角点显示
- 根据角点数和尺寸创建一个理想的棋盘格(用point向量存储所有理论上的角点坐标)
- 通过calibrateCamera函数由理想坐标和实际图像坐标进行标定,可得到标定结果
- 由projectPoints函数计算反向投影误差
1.2.2 MATLAB
MATLAB也提供了相机内参标定的工具箱,包括Camera Calibration Toolbox和Image Processing Toolbox等。Camera Calibration Toolbox使用标定板对相机进行标定,并提供了可视化工具,如ShowExtrinsics函数,用于显示相机的外参参数。Image Processing Toolbox提供了更加高级的算法,如多目相机标定,以支持更加复杂的应用场景。
简单过程如下:
- 应用程序中找到Camera Calibration
- 添加标定板拍摄图片(按Ctrl可一次添加多张)
- 输入棋盘格每格的尺寸大小
- 显示已检测出的棋盘格,点击Calibration,开始标定。
- 得到标定结果(平均误差小于0.5即可认为结果可靠)
- 可查看标定结果和程序
1.2.3 ROS
ROS(Robot Operating System)是一种常用的机器人操作系统,其中包含相机内参标定的相关包,如camera_calibration。该包通过对标定板拍摄的多幅图像进行处理,计算出相机的内参参数,并自动保存标定结果。此外,ROS还提供了一系列可视化工具,如image_view,用于显示相机的图像和标定结果。
相关文章:
SLAM|1. 相机投影及相机畸变
一个能思考的人,才真是一个力量无边的人。——巴尔扎克 本章主要内容: 1.针孔相机模型 2.相机成像的几个坐标系图像 3.畸变及相机标定 本节主要介绍在照相机拍摄过程中,现实物体如何跟照片上的像素关联起来,具体涉及相机成像的物…...

nginx配置及虚拟主机
nginx配置及虚拟主机 一、http协议介绍1、网站类型2、涉及的软件3、http协议介绍 二、nginx安装、启动1、nginx介绍2、nginx安装3、nginx启动管理 三、nginx配置文件1、配置文件语法结构2、全局配置3、事件驱动模型的配置4、http的配置 四、虚拟主机配置1、类型2、基于名称的虚…...

ElasticSearch - Bucket Script 使用指南
文章目录 官方文档Bucket Script 官文1. 什么是 ElasticSearch 中的 Bucket Script?2. 适用场景3. Bucket Script 的基本结构4. 关键参数详解5. 示例官方示例:计算每月 T 恤销售额占总销售额的比率百分比示例计算:点击率 (CTR) 6. 注意事项与…...

Android的SQLiteOpenHelper类 笔记241027
SQLiteOpenHelper SQLiteOpenHelper是Android开发中用于管理SQLite数据库的一个非常重要的工具类。以下是对SQLiteOpenHelper的详细介绍: 一、基本概念 SQLiteOpenHelper是一个抽象类,它主要用于管理数据库的创建和版本管理。通过继承这个类ÿ…...

「Mac畅玩鸿蒙与硬件10」鸿蒙开发环境配置篇10 - 项目实战:计数器应用
本篇将通过一个简单的计数器应用,带你体验鸿蒙开发环境的实际操作流程。本项目主要练习组件的使用、事件响应和状态管理,帮助开发者熟悉基本的应用构建流程。 关键词 计数器应用组件操作事件响应状态管理HarmonyOS 应用开发一、创建计数器项目 1.1 在 DevEco Studio 中新建项…...

安卓逆向之ARM汇编寻址,汇编指令
一:ARM汇编寻址 1. 立即数寻址 (Immediate Addressing) 指令中直接给出一个常数值(立即数),并对其进行操作。 MOV R0, #5 ; 将立即数5载入寄存器R02. 直接寻址 (Direct Addressing) 指令中给出的地址直接指定了内存中的一…...

Idea常见插件(超级实用)
文章目录 Idea好用的插件推荐Idea插件安装Chinese(中文版)Alibaba Java Coding Guidelines(代码规范)Auto Filling Java Arguments(自动补全参数)CamelCase(变量名称格式转换)CodeGeeX(智能&…...

C++中如何获取时间并格式化为字符串?
在C中,你可以使用标准库中的 <chrono> 和 <iomanip> 头文件来获取当前时间并将其格式化为字符串。以下是一个简单的示例,展示了如何获取当前时间并将其格式化为一个可读的字符串(例如:YYYY-MM-DD HH:MM:SS)…...

项目1 yolov5鱼苗检测计数
yolov5鱼苗检测 1. yolov5鱼苗检测1.1. 环境配置1.2 Predict1.3 Validate1.4 Train1.5 生成 ONNX 2 代码解析2.1 模型2.2 数据集2.3 损失函数2.4 训练2.5 预测 之前做的项目,再回顾一下 环境:GPU1卡,CPU4核,每显卡12GB,…...

GPU 学习笔记三:GPU多机多卡组网和拓扑结构分析(基于数据中心分析)
文章目录 一、概述二、数据中心(DC)2.1 数据中心简介2.2 传统数据中心的网络模型2.3 脊叶网络模型(Spine-Leaf)2.4 Facebook的Fabric网络架构 三、基于数据中心的多机多卡拓扑3.1 Spine-Leaf 架构网络规模测算方法3.2 NVIDIA多机多…...
各编程语言处理HTTP状态码的库推荐
Http 状态码用那个库 备注 Spring 的状态码库为 org.springframework.http.HttpStatus Apache 的状态码库为: org.apache.http.HttpStatus 通常这 2 个库都差不多。 如你的项目中已经用了 Spring 的代码的话,那么就用 Spring 的库吧。 不管是那个库…...

【Mac】Python 环境管理工具
一、pyenv 1、安装 (1)安装 brew install pyenv(2)环境配置 查看系统使用 shell 是 bash 还是 zsh bash 配置文件:~/.bash_profile zsh 配置文件:~/.zshrc userMac ~ % echo $SHELL /bin/zsh userMa…...

大语言模型数据流程源码解读(基于llama3模型)
文章目录 前言一、数据进入LlamaForCausalLM(LlamaPreTrainedModel)类二、数据进入LlamaModel(LlamaPreTrainedModel)类1、input_ids的embedding编码2、position_ids位置获取3、causal_mask因果mask构建1、causal_mask调用2、因果mask代码解读(_update_causal_mask)4、hidden_s…...

[蓝桥杯 2015 省 A] 饮料换购
题目描述 乐羊羊饮料厂正在举办一次促销优惠活动。乐羊羊 C 型饮料,凭 3 个瓶盖可以再换一瓶 C 型饮料,并且可以一直循环下去(但不允许暂借或赊账)。 请你计算一下,如果小明不浪费瓶盖,尽量地参加活动,那么ÿ…...

K8S测试pod内存和CPU资源不足
只设置requests参数 mysql主从pod启动后监控 读压测之后 同时设置limits和requests,只调低内存值 监控 压力测试 同时设置limits和requests,只调低CPU值 初始状态 开始压测 结论 对于CPU,如果pod中服务使用CPU超过设置的limits&…...

rabbitmq 使用注意事项
1,注意开启的端口号,一共四个端口号,1883是mqtt连接的端口号,如果没开,是连接不上的需要手动起mqtt插件。 //开始mqtt插件服务 rabbitmq-plugins enable rabbitmq_mqtt 2,15672端口是http网页登录的管理后…...

<项目代码>YOLOv8 夜间车辆识别<目标检测>
YOLOv8是一种单阶段(one-stage)检测算法,它将目标检测问题转化为一个回归问题,能够在一次前向传播过程中同时完成目标的分类和定位任务。相较于两阶段检测算法(如Faster R-CNN),YOLOv8具有更高的…...

xterm.js 库作用
前言:xterm.js 是一个用于在网页上模拟终端的强大 JavaScript 库。 一、在网页中实现终端模拟 1. 提供类似终端的界面 xterm.js可以在浏览器中创建一个看起来和行为都类似于传统终端的界面。这包括显示命令行提示符、接受用户输入、显示命令输出等。 例如&#…...
在Excel中如何快速筛选非特定颜色
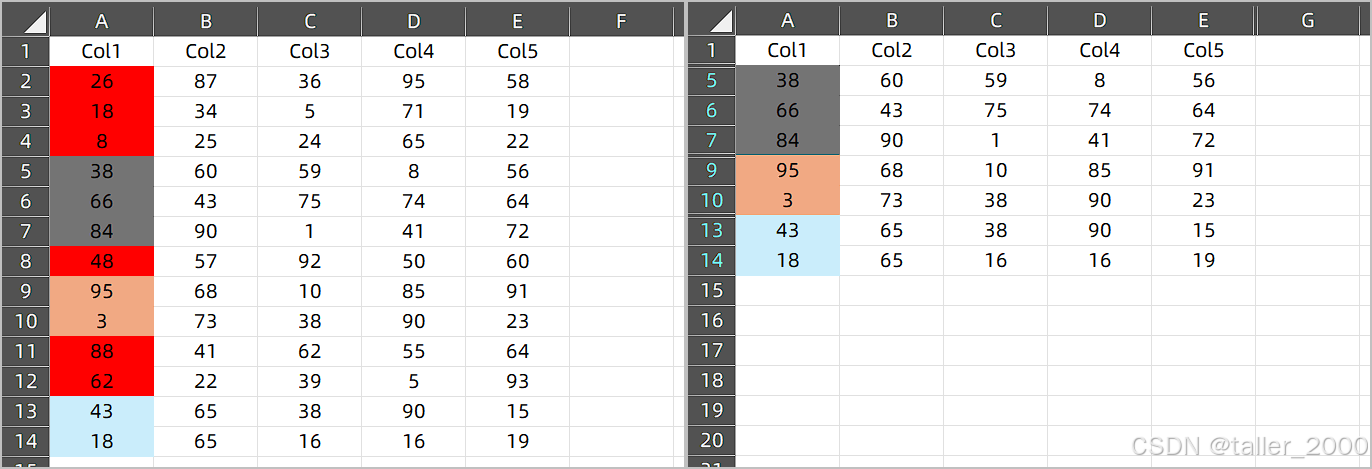
Excel中的自动筛选是个非常强大的工具,不仅可以筛选内容,而且可以筛选颜色,例如筛选A列红色单元格。但是有时希望筛选除了红色之外的单元格(下图右侧所示),其他单元格的填充色不固定,有几种颜色…...

kotlin定时器和主线程定时器
场景 最近要用kotlin写一个每隔一段时间切视频并截图 刷刷的就写出来了,很快啊 timerTask object : TimerTask() {override fun run() {captureWindow()if ((group 1) * 4 > urls.size) {showDialog()timerTask.cancel()timer.cancel()}groupupdatePlayers(…...
网络六边形受到攻击
大家读完觉得有帮助记得关注和点赞!!! 抽象 现代智能交通系统 (ITS) 的一个关键要求是能够以安全、可靠和匿名的方式从互联车辆和移动设备收集地理参考数据。Nexagon 协议建立在 IETF 定位器/ID 分离协议 (…...
阿里云ACP云计算备考笔记 (5)——弹性伸缩
目录 第一章 概述 第二章 弹性伸缩简介 1、弹性伸缩 2、垂直伸缩 3、优势 4、应用场景 ① 无规律的业务量波动 ② 有规律的业务量波动 ③ 无明显业务量波动 ④ 混合型业务 ⑤ 消息通知 ⑥ 生命周期挂钩 ⑦ 自定义方式 ⑧ 滚的升级 5、使用限制 第三章 主要定义 …...
以下是对华为 HarmonyOS NETX 5属性动画(ArkTS)文档的结构化整理,通过层级标题、表格和代码块提升可读性:
一、属性动画概述NETX 作用:实现组件通用属性的渐变过渡效果,提升用户体验。支持属性:width、height、backgroundColor、opacity、scale、rotate、translate等。注意事项: 布局类属性(如宽高)变化时&#…...

SpringBoot+uniapp 的 Champion 俱乐部微信小程序设计与实现,论文初版实现
摘要 本论文旨在设计并实现基于 SpringBoot 和 uniapp 的 Champion 俱乐部微信小程序,以满足俱乐部线上活动推广、会员管理、社交互动等需求。通过 SpringBoot 搭建后端服务,提供稳定高效的数据处理与业务逻辑支持;利用 uniapp 实现跨平台前…...
)
相机Camera日志分析之三十一:高通Camx HAL十种流程基础分析关键字汇总(后续持续更新中)
【关注我,后续持续新增专题博文,谢谢!!!】 上一篇我们讲了:有对最普通的场景进行各个日志注释讲解,但相机场景太多,日志差异也巨大。后面将展示各种场景下的日志。 通过notepad++打开场景下的日志,通过下列分类关键字搜索,即可清晰的分析不同场景的相机运行流程差异…...

今日科技热点速览
🔥 今日科技热点速览 🎮 任天堂Switch 2 正式发售 任天堂新一代游戏主机 Switch 2 今日正式上线发售,主打更强图形性能与沉浸式体验,支持多模态交互,受到全球玩家热捧 。 🤖 人工智能持续突破 DeepSeek-R1&…...
多模态大语言模型arxiv论文略读(108)
CROME: Cross-Modal Adapters for Efficient Multimodal LLM ➡️ 论文标题:CROME: Cross-Modal Adapters for Efficient Multimodal LLM ➡️ 论文作者:Sayna Ebrahimi, Sercan O. Arik, Tejas Nama, Tomas Pfister ➡️ 研究机构: Google Cloud AI Re…...
)
Typeerror: cannot read properties of undefined (reading ‘XXX‘)
最近需要在离线机器上运行软件,所以得把软件用docker打包起来,大部分功能都没问题,出了一个奇怪的事情。同样的代码,在本机上用vscode可以运行起来,但是打包之后在docker里出现了问题。使用的是dialog组件,…...
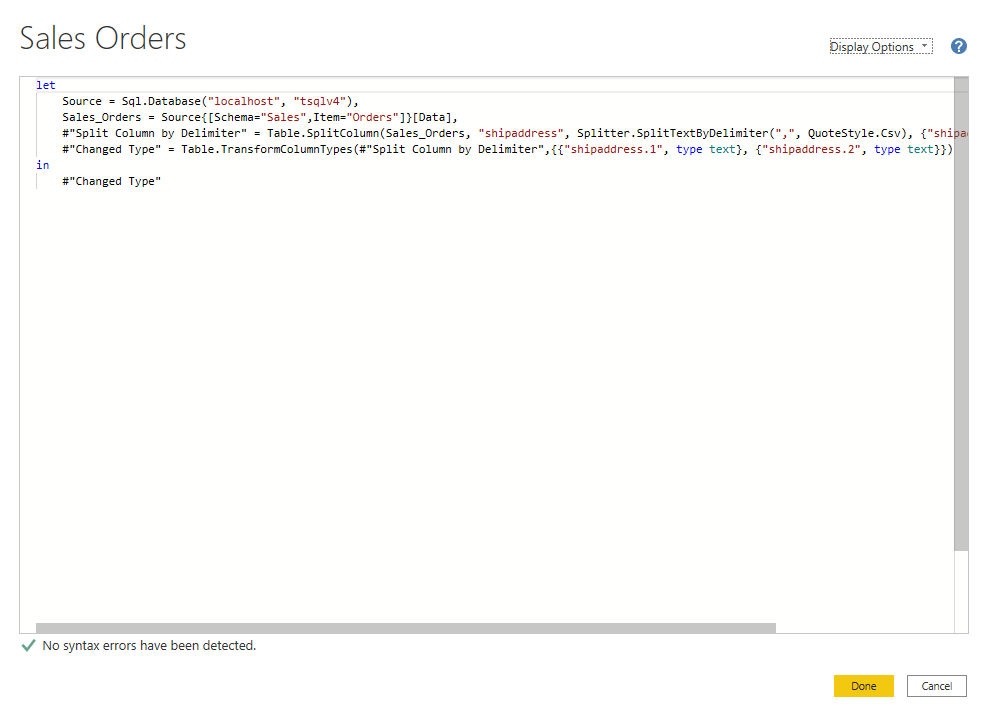
微软PowerBI考试 PL300-在 Power BI 中清理、转换和加载数据
微软PowerBI考试 PL300-在 Power BI 中清理、转换和加载数据 Power Query 具有大量专门帮助您清理和准备数据以供分析的功能。 您将了解如何简化复杂模型、更改数据类型、重命名对象和透视数据。 您还将了解如何分析列,以便知晓哪些列包含有价值的数据,…...
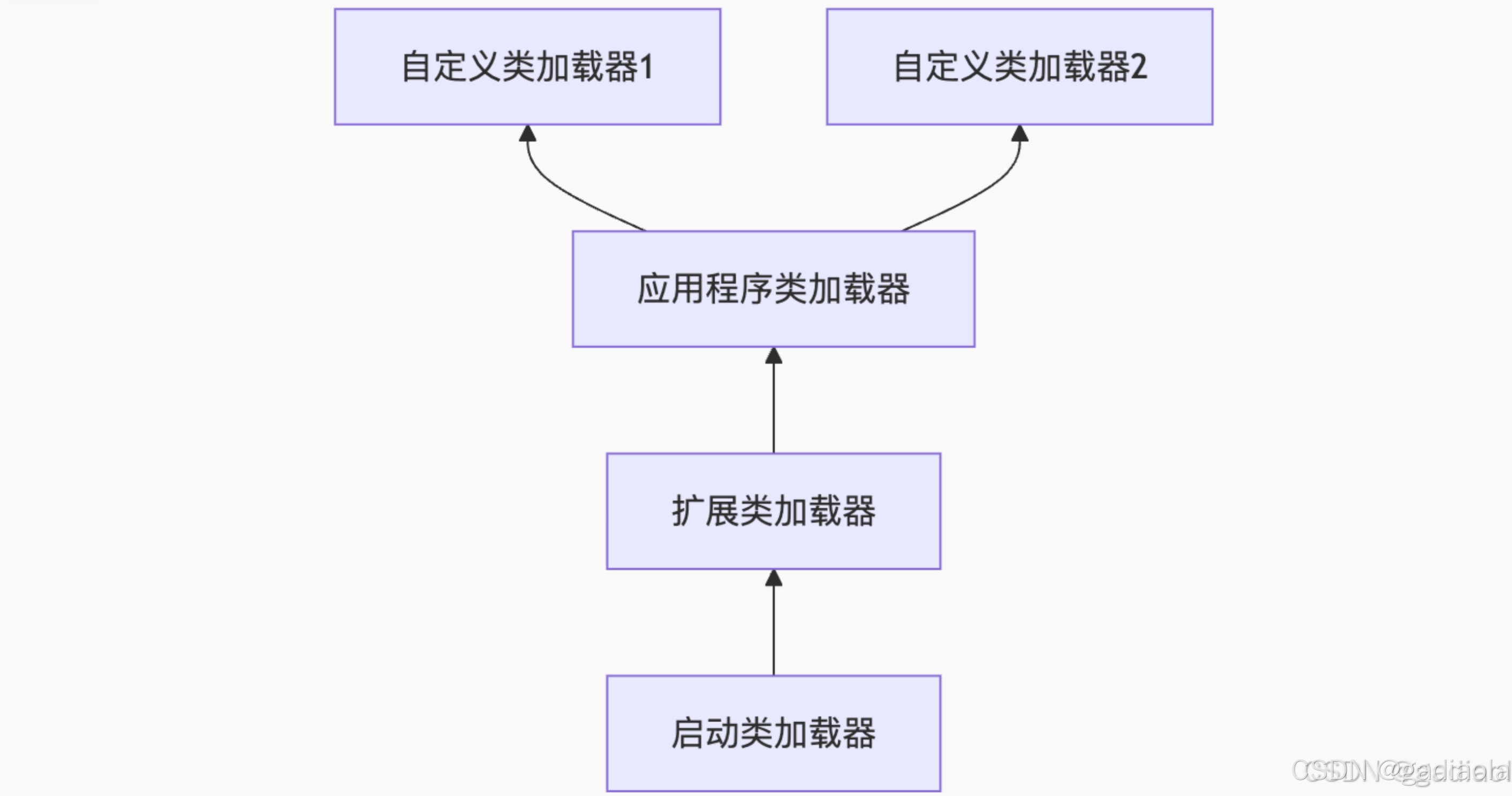
【JVM面试篇】高频八股汇总——类加载和类加载器
目录 1. 讲一下类加载过程? 2. Java创建对象的过程? 3. 对象的生命周期? 4. 类加载器有哪些? 5. 双亲委派模型的作用(好处)? 6. 讲一下类的加载和双亲委派原则? 7. 双亲委派模…...