引力搜索算法

引力搜索算法过程,包括了初始化、适应度评估、质量计算、加速度计算、更新速度和位置的一些步骤。
import numpy as np
import random as rd
from math import exp, sqrt
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
from matplotlib.animation import FuncAnimation# 定义目标函数
def objFunction(x1, x2):return x1 ** 2 + x2 ** 2# 初始化种群的位置和速度
def init(n):position, velocity = [], []for i in range(n):X1 = rd.uniform(-10, 10)X2 = rd.uniform(-10, 10)V1 = rd.uniform(-3, 3)V2 = rd.uniform(-3, 3)position.append([X1, X2])velocity.append([V1, V2])return position, velocity# 计算适应度值
def fitnessEva(position):fitness = []for i in range(len(position)):fitness.append(objFunction(position[i][0], position[i][1]))return fitness# 找到最佳和最差的适应度值
def findBestAndWorst(position):return min(fitnessEva(position)), max(fitnessEva(position))# 计算每个个体的质量
def calculateMass(fitness):mass = []Mass = []for i in range(len(fitness)):mass.append((fitness[i] - max(fitness)) / (min(fitness) - max(fitness)))for i in range(len(mass)):Mass.append(mass[i] / sum(mass))return Mass# 计算每个个体的加速度
def calculateAcceleration(position, Mass, G, topK):acceleration = []Fi0, Fi1 = 0, 0for i in range(len(position)):for j in range(len(position)):if i != j and j in topK:Fi0 += rd.random() * G * ((Mass[i] * Mass[j]) / (calculateDistance(position[i], position[j]) + r)) * (position[j][0] - position[i][0])Fi1 += rd.random() * G * ((Mass[i] * Mass[j]) / (calculateDistance(position[i], position[j]) + r)) * (position[j][1] - position[i][1])if Mass[i] != 0:acceleration.append([Fi0 / Mass[i] / 10, Fi1 / Mass[i] / 10]) # 这里除10是为了避免粒子的加速度过大else:acceleration.append([10, 10])Fi0 = 0Fi1 = 0return acceleration# 找出适应度更优的前K个粒子
def findTopK(fitness, K):topK = []dic = {}for i in range(len(fitness)):dic[i] = fitness[i]fitness.sort()for i in range(K):topK.append(list(dic.keys())[list(dic.values()).index(fitness[i])])return topK# 更新速度和位置
def updateVelocityAndPosition(acceleration, position, velocity):for i in range(len(velocity)):velocity[i][0] = rd.random() * velocity[i][0] + acceleration[i][0]velocity[i][1] = rd.random() * velocity[i][1] + acceleration[i][1]position[i][0] = position[i][0] + velocity[i][0]position[i][1] = position[i][1] + velocity[i][1]# 计算两个点之间的距离
def calculateDistance(p1, p2):return sqrt((p1[0] - p2[0]) ** 2 + (p1[1] - p2[1]) ** 2)# 检查位置是否在可行域内
def checkPosition(position):for i in range(len(position)):if position[i][0] < -10:position[i][0] = -10elif position[i][0] > 10:position[i][0] = 10if position[i][1] < -10:position[i][1] = -10elif position[i][1] > 10:position[i][1] = 10if __name__ == '__main__':G = 100r = 1K = 50iterx, maxIterx = 0, 50position, velocity = init(50)fig = plt.figure(figsize=(10, 8))ax = fig.add_subplot(111, projection='3d')scatter = ax.scatter([], [], [], c='pink', marker='o')path_lines = [ax.plot([], [], [], color='lightyellow')[0] for _ in range(50)]ax.set_xlim(-10, 10)ax.set_ylim(-10, 10)ax.set_zlim(0, 200)ax.set_title('Gravitational Search Algorithm Visualization')ax.set_xlabel('X1')ax.set_ylabel('X2')ax.set_zlabel('Fitness')def animate(iteration, position, velocity, G, K, path_history):fitness = fitnessEva(position) # 适应性评估G = G * exp(-20 * iteration / maxIterx) # 更新引力常量Mass = calculateMass(fitness) # 更新粒子质量topK = findTopK(fitness, K) # 找出适应度更优的前K个粒子acceleration = calculateAcceleration(position, Mass, G, topK) # 计算粒子加速度updateVelocityAndPosition(acceleration, position, velocity) # 根据加速度更新速度与位置checkPosition(position) # 检查粒子是否冲出了解空间K = K - iteration # 更新K值# Update scatter plotscatter._offsets3d = ([pos[0] for pos in position],[pos[1] for pos in position],fitness)# Update path historyfor i in range(len(position)):path_history[i].append(position[i] + [fitness[i]])path_lines[i].set_data(np.array(path_history[i]).T[:2])path_lines[i].set_3d_properties(np.array(path_history[i]).T[2])best_fitness = min(fitnessEva(position))best_position = position[fitnessEva(position).index(best_fitness)]ax.set_title(f'Iteration {iteration}: Best Fitness = {best_fitness:.4f}')return scatter,path_history = [[] for _ in range(50)]ani = FuncAnimation(fig, lambda frame: animate(frame, position, velocity, G, K, path_history), frames=maxIterx,interval=200, blit=True, repeat=False)plt.show()best_fitness = min(fitnessEva(position))best_position = position[fitnessEva(position).index(best_fitness)]print("最优解:", best_fitness)print("最优解对应的位置:", best_position)相关文章:
引力搜索算法
引力搜索算法过程,包括了初始化、适应度评估、质量计算、加速度计算、更新速度和位置的一些步骤。 import numpy as np import random as rd from math import exp, sqrt import matplotlib.pyplot as plt from mpl_toolkits.mplot3d import Axes3D from matplotli…...

【时间之外】IT人求职和创业应知【35】-RTE三进宫
目录 新闻一:京东工业发布11.11战报,多项倍增数据体现工业经济信心提升 新闻二:阿里云100万核算力支撑天猫双11,弹性计算规模刷新纪录 新闻三:声网CEO赵斌:RTE将成为生成式AI时代AI Infra的关键部分 认知…...

Linux的目录结构
/ ├── bin # Binary - 存放用户可以直接使用的基本二进制可执行文件 ├── sbin # System Binaries - 存放系统管理员专用的二进制可执行文件 ├── usr # Unix System Resources - 存放用户使用的软件和库文件 │ ├── bin # Binary - 用户级应用程序…...

python: generator IDAL and DAL using sql server 2019
其它数据库也是一样的思维方式 create IDAL # encoding: utf-8 # 版权所有 2024 ©涂聚文有限公司 # 许可信息查看:言語成了邀功盡責的功臣,還需要行爲每日來值班嗎 # 描述: # Author : geovindu,Geovin Du 涂聚文. # IDE : P…...

命令执行简单
前言:小迪安全2022第一节反弹shell,小迪用的是两台都是云服务器,没有服务器可以在自己的主机上搭建也是可以的,主机上搭两个网站 思路:生成一个木马文件,下载到本机,然后利用本机上传到目标主机…...
)
【一句话经验】亚马逊云EC2 ubuntu24.04.1开启ROOT登录Permission denied (publickey)
按照常规的方法SSH登录会一直报错: Permission denied (publickey) 因为亚马逊云的默认配置不是在/etc/ssh/sshd_config,而是在引入的文件里了,所以在instance控制台输入这行命令来解除登录限制: sudo sed -i s/^PasswordAuthe…...

百度智能云千帆大模型平台引领企业创新增长
本文整理自百度世界大会 2024——「智能跃迁 产业加速」论坛的同名演讲。 更多大会演讲内容,请访问: https://baiduworld.baidu.com 首先,跟大家分享一张图,这个是我们目前大模型应用落地的场景分布。可以看到,大模型…...

【Linux】深入理解GCC/G++编译流程及库文件管理
目录 1.背景知识 2.gcc/g如何完成编译 (1) 预处理(进行宏替换) (2) 编译(生成汇编) (3) 汇编(生成机器可识别代码) (4) 链接(生成可执行文件或库文件) (5) 总结 (6) 函数库 …...

【Unity基础】对比Unity中两种粒子系统
在Unity中,Particle System和Visual Effect Graph (VFX) 都是用于创建粒子效果的工具,但它们的设计目标、使用场景和功能特点有所不同。以下是详细对比: 1. Particle System 特点 传统粒子系统,Unity自带的模块化粒子特效工具。…...

琐碎笔记——pytest实现前置、后置、参数化、跳过用例执行以及重试
pytest的fixture中文介绍可参考(不过文档稍微有点老): https://www.osgeo.cn/pytest/fixture.html#what-fixtures-are pytest各个作用域的fixture scope “function” 可作用于每个用例 fixture使用的声明放在类定义前面,类中的…...

C# 深层副本与浅层副本 深拷贝与浅拷贝
C# 深层副本与浅层副本 数据复制是编程中的重要任务。 对象是 OOP 中的复合数据类型。 对象中的成员字段可以按值或按引用存储。 可以以两种方式执行复制。 浅表副本将所有值和引用复制到新实例中。 引用所指向的数据不会被复制; 仅指针被复制。 新的引用指向原始…...

CH06_Lambda表达式
第6章:Lambda表达式 本章目标 为什么要学习C#编程语言 了解C#相关常识 C#开发工具Visual Studio安装 掌握C#程序的开发步骤 掌握C#的注释 掌握C#的常用转义符 本章内容 lambda表达式演变史 C# 匿名函数的演变历史可以追溯到 C# 语言的不同版本,…...

大模型本地部署实践:Ollama+Open-WebUI(MacOS)
目录 什么是Ollama Ollama安装 对话界面可视化?Open-WebUI! 安装Open-WebUI 什么是Ollama Ollama是一个为简化大语言模型本地部署与交互的开源框架。它提供了用户友好的接口,帮助开发者和模型爱好者在没有依赖外部API的基础上高效地运行、…...

JavaScript——DOM编程、JS的对象和JSON
一、DOM编程 DOM(Document Object Model)编程:就是使用document对象的API,完成对网页HTML文档进行动态修改,以实现网页数据,和样式动态变化效果的编程。 (一)DOM获取元素的多种方法 1.查找元素的函数 getElementById("id值…...

SIMCom芯讯通A7680C在线升级:FTP升级成功;http升级腾讯云对象储存的文件失败;http升级私有服务器的文件成功
从事嵌入式单片机的工作算是符合我个人兴趣爱好的,当面对一个新的芯片我即想把芯片尽快搞懂完成项目赚钱,也想着能够把自己遇到的坑和注意事项记录下来,即方便自己后面查阅也可以分享给大家,这是一种冲动,但是这个或许并不是原厂希望的,尽管这样有可能会牺牲一些时间也有哪天原…...

OSRM docker环境启动
命令一把梭 wget https://download.geofabrik.de/asia/china-latest.osm.pbf docker pull osrm/osrm-backend docker run -t -v "${PWD}:/data" osrm/osrm-backend osrm-extract -p /opt/car.lua /data/china-latest.osm.pbf docker run -t -v "${PWD}:/data&q…...

Vue3 动态获取 assets 文件夹图片
我真服了Vue3 这个老六了,一个简单图片src 赋值搞得那么复杂. //item.type 是我遍历类型的类型参数 <img alt"吐槽大会" :src"getAssetUrl(item.type)" /> 基于 Vue2 的Webpack 处理,还不错,可以用/ 这种绝对路径,可以接受,虽然多了个require很不爽…...

<项目代码>YOLOv8 草莓成熟识别<目标检测>
YOLOv8是一种单阶段(one-stage)检测算法,它将目标检测问题转化为一个回归问题,能够在一次前向传播过程中同时完成目标的分类和定位任务。相较于两阶段检测算法(如Faster R-CNN),YOLOv8具有更高的…...

代码随想录算法训练营第五十一天|Day51 图论
岛屿数量 深搜 https://www.programmercarl.com/kamacoder/0099.%E5%B2%9B%E5%B1%BF%E7%9A%84%E6%95%B0%E9%87%8F%E6%B7%B1%E6%90%9C.html 思路 #include <stdio.h> #define MAX_SIZE 50 int grid[MAX_SIZE][MAX_SIZE]; int visited[MAX_SIZE][MAX_SIZE]; int N, M; …...

uniapp 自定义加载组件,全屏加载,局部加载 (微信小程序)
效果图 全屏加载 页面加载使用 局部加载 列表加载里面使用 使用gif html <template><view><view class"" v-if"typeFullScreen"><view class"loading" v-if"show"><view class""><i…...
` 方法)
深入浅出:JavaScript 中的 `window.crypto.getRandomValues()` 方法
深入浅出:JavaScript 中的 window.crypto.getRandomValues() 方法 在现代 Web 开发中,随机数的生成看似简单,却隐藏着许多玄机。无论是生成密码、加密密钥,还是创建安全令牌,随机数的质量直接关系到系统的安全性。Jav…...

基于服务器使用 apt 安装、配置 Nginx
🧾 一、查看可安装的 Nginx 版本 首先,你可以运行以下命令查看可用版本: apt-cache madison nginx-core输出示例: nginx-core | 1.18.0-6ubuntu14.6 | http://archive.ubuntu.com/ubuntu focal-updates/main amd64 Packages ng…...

基础测试工具使用经验
背景 vtune,perf, nsight system等基础测试工具,都是用过的,但是没有记录,都逐渐忘了。所以写这篇博客总结记录一下,只要以后发现新的用法,就记得来编辑补充一下 perf 比较基础的用法: 先改这…...

Java多线程实现之Callable接口深度解析
Java多线程实现之Callable接口深度解析 一、Callable接口概述1.1 接口定义1.2 与Runnable接口的对比1.3 Future接口与FutureTask类 二、Callable接口的基本使用方法2.1 传统方式实现Callable接口2.2 使用Lambda表达式简化Callable实现2.3 使用FutureTask类执行Callable任务 三、…...

DBAPI如何优雅的获取单条数据
API如何优雅的获取单条数据 案例一 对于查询类API,查询的是单条数据,比如根据主键ID查询用户信息,sql如下: select id, name, age from user where id #{id}API默认返回的数据格式是多条的,如下: {&qu…...
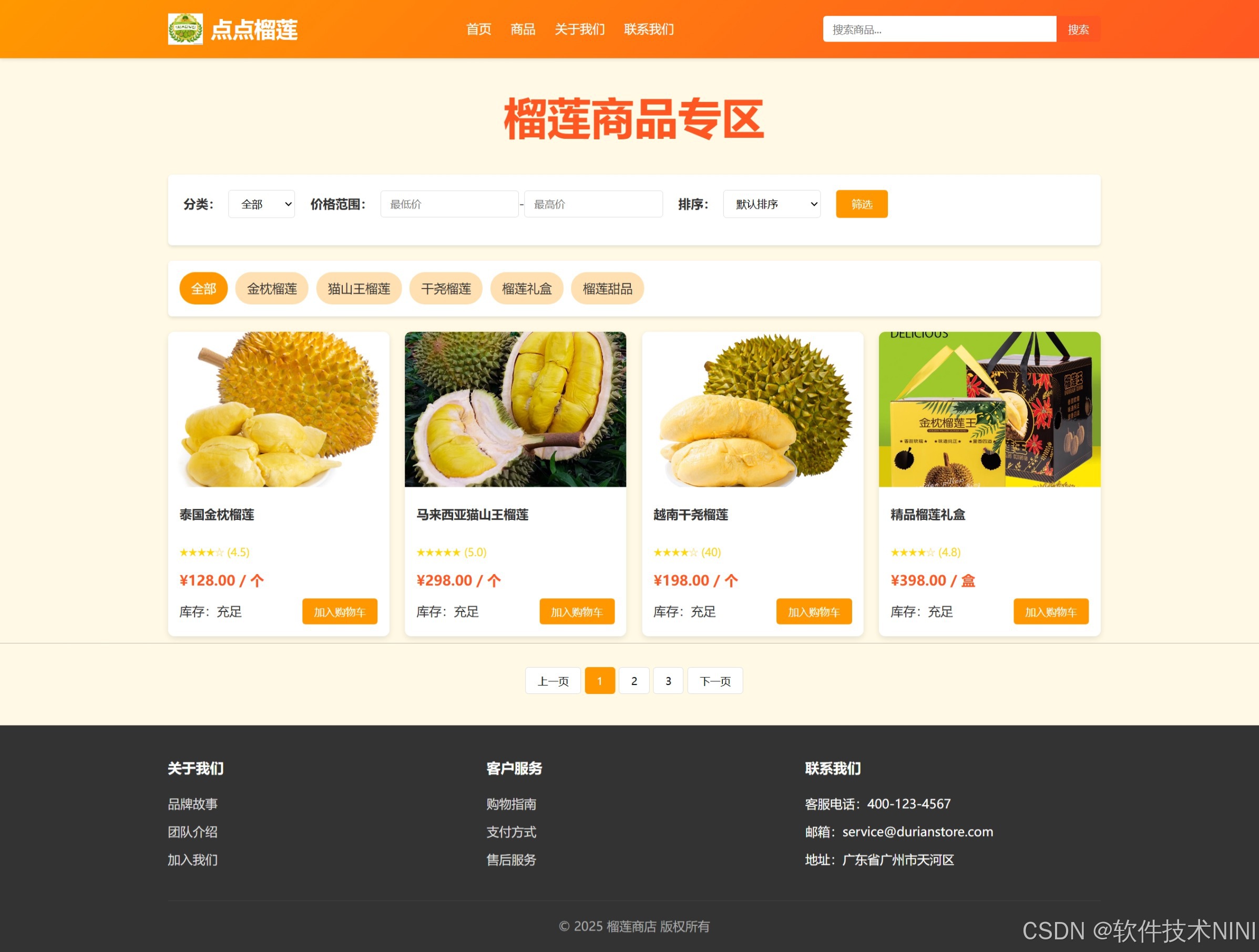
html css js网页制作成品——HTML+CSS榴莲商城网页设计(4页)附源码
目录 一、👨🎓网站题目 二、✍️网站描述 三、📚网站介绍 四、🌐网站效果 五、🪓 代码实现 🧱HTML 六、🥇 如何让学习不再盲目 七、🎁更多干货 一、👨…...
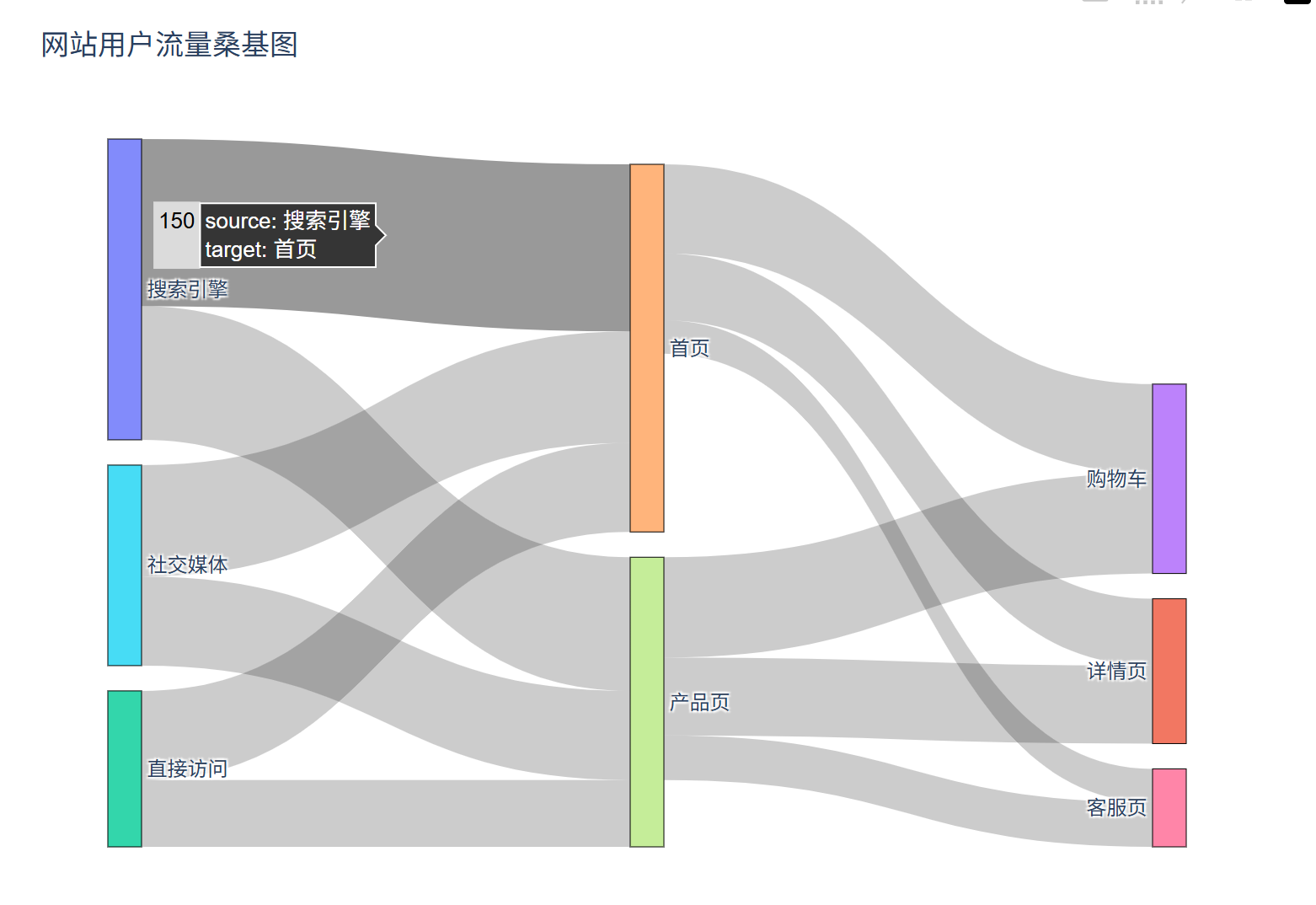
相关类相关的可视化图像总结
目录 一、散点图 二、气泡图 三、相关图 四、热力图 五、二维密度图 六、多模态二维密度图 七、雷达图 八、桑基图 九、总结 一、散点图 特点 通过点的位置展示两个连续变量之间的关系,可直观判断线性相关、非线性相关或无相关关系,点的分布密…...
加密芯片与MCU协同工作的典型流程)
SE(Secure Element)加密芯片与MCU协同工作的典型流程
以下是SE(Secure Element)加密芯片与MCU协同工作的典型流程,综合安全认证、数据保护及防篡改机制: 一、基础认证流程(参数保护方案) 密钥预置 SE芯片与MCU分别预置相同的3DES密钥(Key1、Key2…...

win11部署suna
参考链接 项目链接 沙盒链接 数据库链接 本文介绍 本文只为项目的辅助,手把手太麻烦 执行步骤 1.下载代码 git clone https://github.com/kortix-ai/suna.git cd suna2.配置环境(在Anaconda Prompt上执行) python setup.py3.运行代码 …...
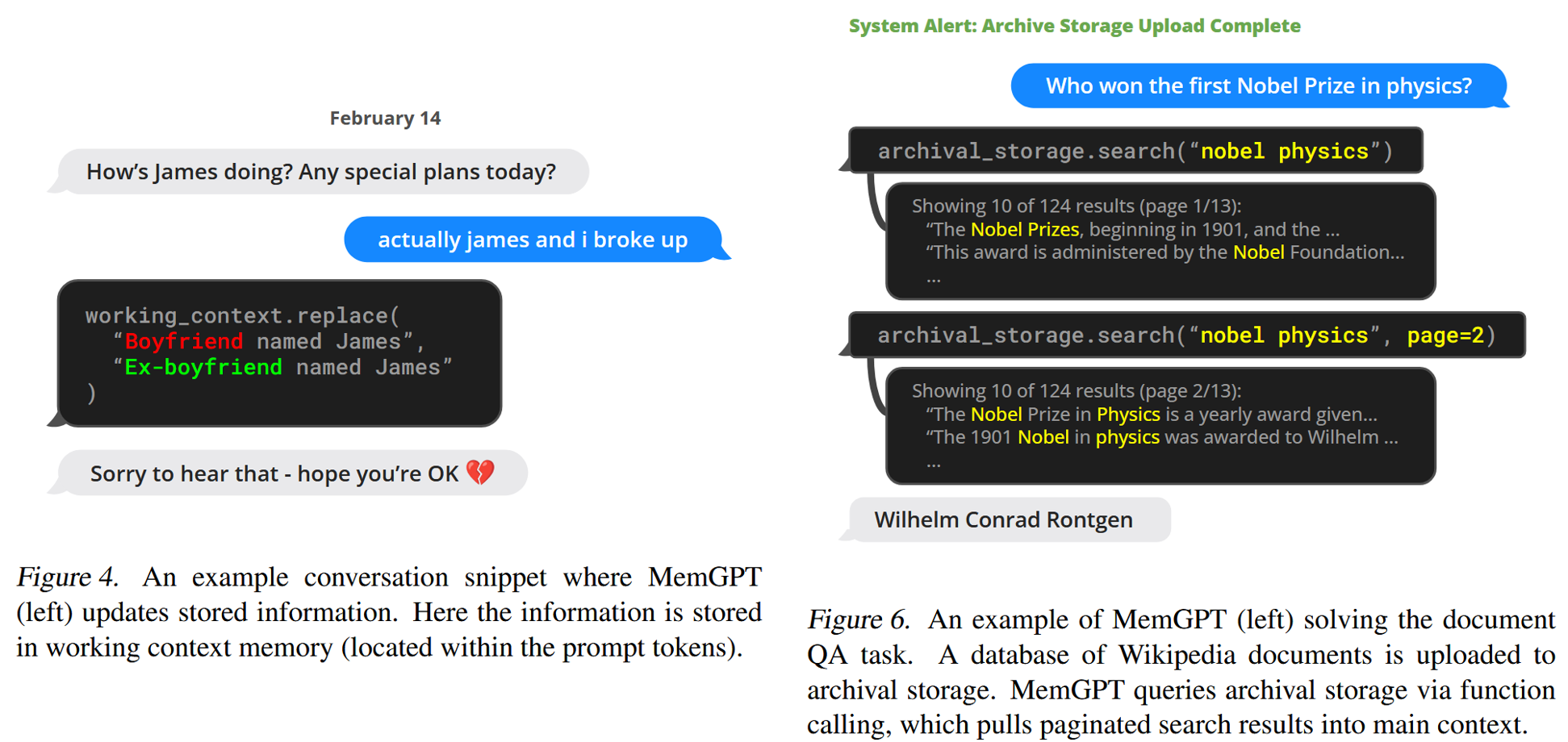
【论文解读】MemGPT: 迈向为操作系统的LLM
1st author: Charles Packer paper MemGPT[2310.08560] MemGPT: Towards LLMs as Operating Systems code: letta-ai/letta: Letta (formerly MemGPT) is the stateful agents framework with memory, reasoning, and context management. 这个项目现在已经转化为 Letta &a…...