STM32串口——5个串口的使用方法
参考文档
STM32串口——5个串口的使用方法_51CTO博客_stm32串口通信的接收与发送
串口是我们常用的一个数据传输接口,STM32F103系列单片机共有5个串口,其中1-3是通用同步/异步串行接口USART(Universal Synchronous/Asynchronous Receiver/Transmitter),4,、5是通用异步串行接口UART(Universal Asynchronous Receiver/Transmitter)。
配置串口包括三部分内容:
1. I/O口配置:TXD配置为复用推挽输出(GPIO_Mode_AF_PP),RXD配置为浮空输入(GPIO_Mode_IN_FLOATING);
2. 串口配置:波特率等;
3. 中断向量配置:一般用中断方式接收数据。
注意事项:
1. USART1是挂在APB2,使能时钟命令为:
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE );
其他几个则挂在APB1上,如2口:
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2, ENABLE );
2. 配置4口和5口的时候,中断名为UART4、UART5,中断入口分别为
UART4_IRQn、UART5_IRQn
对应的中断服务函数为
void UART4_IRQHandler(void)
和
void UART5_IRQHandler(void)。
#include "stm32f10x.h"
#include "misc.h"
#include "stm32f10x_gpio.h"
#include "stm32f10x_usart.h" void USART1_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure; RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE );
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE );GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //USART1 TX;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure); //端口A;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; //USART1 RX;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入;
GPIO_Init(GPIOA, &GPIO_InitStructure); //端口A;USART_InitStructure.USART_BaudRate = 9600; //波特率;
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //数据位8位;
USART_InitStructure.USART_StopBits = USART_StopBits_1; //停止位1位;
USART_InitStructure.USART_Parity = USART_Parity_No ; //无校验位;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
//无硬件流控;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
//收发模式;
USART_Init(USART1, &USART_InitStructure);//配置串口参数;NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //设置中断组,4位抢占优先级,4位响应优先级;NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn; //中断号;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //抢占优先级;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //响应优先级;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
USART_Cmd(USART1, ENABLE); //使能串口;
}void USART1_Send_Byte(u8 Data) //发送一个字节;
{
USART_SendData(USART1,Data);
while( USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET );
}void USART1_Send_String(u8 *Data) //发送字符串;
{
while(*Data)
USART1_Send_Byte(*Data++);
}void USART1_IRQHandler(void) //中断处理函数;
{
u8 res;
if(USART_GetITStatus(USART1, USART_IT_RXNE) == SET) //判断是否发生中断;
{
USART_ClearFlag(USART1, USART_IT_RXNE); //清除标志位;
res=USART_ReceiveData(USART1); //接收数据;
USART1_Send_Byte(res); //用户自定义;
}
} void USART2_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure; RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE );
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2, ENABLE );GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2; //USART2 TX;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure); //端口A;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3; //USART2 RX;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入;
GPIO_Init(GPIOA, &GPIO_InitStructure); //端口A;USART_InitStructure.USART_BaudRate = 9600; //波特率;
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //数据位8位;
USART_InitStructure.USART_StopBits = USART_StopBits_1; //停止位1位;
USART_InitStructure.USART_Parity = USART_Parity_No ; //无校验位;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
//无硬件流控;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
//收发模式;
USART_Init(USART2, &USART_InitStructure);//配置串口参数;NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //设置中断组,4位抢占优先级,4位响应优先级;NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn; //中断号;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //抢占优先级;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //响应优先级;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);USART_ITConfig(USART2, USART_IT_RXNE, ENABLE);
USART_Cmd(USART2, ENABLE); //使能串口;
}void USART2_Send_Byte(u8 Data) //发送一个字节;
{
USART_SendData(USART2,Data);
while( USART_GetFlagStatus(USART2, USART_FLAG_TC) == RESET );
}void USART2_Send_String(u8 *Data) //发送字符串;
{
while(*Data)
USART2_Send_Byte(*Data++);
}void USART2_IRQHandler(void) //中断处理函数;
{
u8 res;
if(USART_GetITStatus(USART2, USART_IT_RXNE) == SET) //判断是否发生中断;
{
USART_ClearFlag(USART2, USART_IT_RXNE); //清除标志位;
res=USART_ReceiveData(USART2); //接收数据;
USART2_Send_Byte(res); //用户自定义;
}
} void USART3_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure; RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE );
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART3, ENABLE );GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; //USART3 TX;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure); //端口B;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11; //USART3 RX;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入;
GPIO_Init(GPIOB, &GPIO_InitStructure); //端口B;USART_InitStructure.USART_BaudRate = 9600; //波特率;
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //数据位8位;
USART_InitStructure.USART_StopBits = USART_StopBits_1; //停止位1位;
USART_InitStructure.USART_Parity = USART_Parity_No ; //无校验位;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
//无硬件流控;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
//收发模式;
USART_Init(USART3, &USART_InitStructure);//配置串口参数;NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //设置中断组,4位抢占优先级,4位响应优先级;NVIC_InitStructure.NVIC_IRQChannel = USART3_IRQn; //中断号;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //抢占优先级;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //响应优先级;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);USART_ITConfig(USART3, USART_IT_RXNE, ENABLE);
USART_Cmd(USART3, ENABLE); //使能串口;
}void USART3_Send_Byte(u8 Data) //发送一个字节;
{
USART_SendData(USART3,Data);
while( USART_GetFlagStatus(USART3, USART_FLAG_TC) == RESET );
}void USART3_Send_String(u8 *Data) //发送字符串;
{
while(*Data)
USART3_Send_Byte(*Data++);
}void USART3_IRQHandler(void) //中断处理函数;
{
u8 res;
if(USART_GetITStatus(USART3, USART_IT_RXNE) == SET) //判断是否发生中断;
{
USART_ClearFlag(USART3, USART_IT_RXNE); //清除标志位;
res=USART_ReceiveData(USART3); //接收数据;
USART3_Send_Byte(res); //用户自定义;
}
} void UART4_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure; RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE );
RCC_APB1PeriphClockCmd(RCC_APB1Periph_UART4, ENABLE );GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; //UART4 TX;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC, &GPIO_InitStructure); //端口C;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11; //UART4 RX;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入;
GPIO_Init(GPIOC, &GPIO_InitStructure); //端口C;USART_InitStructure.USART_BaudRate = 9600; //波特率;
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //数据位8位;
USART_InitStructure.USART_StopBits = USART_StopBits_1; //停止位1位;
USART_InitStructure.USART_Parity = USART_Parity_No ; //无校验位;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
//无硬件流控;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
//收发模式;
USART_Init(UART4, &USART_InitStructure);//配置串口参数;NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //设置中断组,4位抢占优先级,4位响应优先级;NVIC_InitStructure.NVIC_IRQChannel = UART4_IRQn; //中断号;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //抢占优先级;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //响应优先级;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);USART_ITConfig(UART4, USART_IT_RXNE, ENABLE);
USART_Cmd(UART4, ENABLE); //使能串口;
}void UART4_Send_Byte(u8 Data) //发送一个字节;
{
USART_SendData(UART4,Data);
while( USART_GetFlagStatus(UART4, USART_FLAG_TC) == RESET );
}void UART4_Send_String(u8 *Data) //发送字符串;
{
while(*Data)
UART4_Send_Byte(*Data++);
}void UART4_IRQHandler(void) //中断处理函数;
{
u8 res;
if(USART_GetITStatus(UART4, USART_IT_RXNE) == SET) //判断是否发生中断;
{
USART_ClearFlag(UART4, USART_IT_RXNE); //清除标志位;
res=USART_ReceiveData(UART4); //接收数据;
UART4_Send_Byte(res); //用户自定义;
}
} void UART5_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure; RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC|RCC_APB2Periph_GPIOD, ENABLE );
RCC_APB1PeriphClockCmd(RCC_APB1Periph_UART5, ENABLE );GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12; //UART5 TX;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC, &GPIO_InitStructure); //端口C;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2; //UART5 RX;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入;
GPIO_Init(GPIOD, &GPIO_InitStructure); //端口D;USART_InitStructure.USART_BaudRate = 9600; //波特率;
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //数据位8位;
USART_InitStructure.USART_StopBits = USART_StopBits_1; //停止位1位;
USART_InitStructure.USART_Parity = USART_Parity_No ; //无校验位;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
//无硬件流控;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
//收发模式;
USART_Init(UART5, &USART_InitStructure);//配置串口参数;NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //设置中断组,4位抢占优先级,4位响应优先级;NVIC_InitStructure.NVIC_IRQChannel = UART5_IRQn; //中断号;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //抢占优先级;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //响应优先级;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);USART_ITConfig(UART5, USART_IT_RXNE, ENABLE);
USART_Cmd(UART5, ENABLE); //使能串口;
}void UART5_Send_Byte(u8 Data) //发送一个字节;
{
USART_SendData(UART5,Data);
while( USART_GetFlagStatus(UART5, USART_FLAG_TC) == RESET );
}void UART5_Send_String(u8 *Data) //发送字符串;
{
while(*Data)
UART5_Send_Byte(*Data++);
}void UART5_IRQHandler(void) //中断处理函数;
{
u8 res;
if(USART_GetITStatus(UART5, USART_IT_RXNE) == SET) //判断是否发生中断;
{
USART_ClearFlag(UART5, USART_IT_RXNE); //清除标志位;
res=USART_ReceiveData(UART5); //接收数据;
UART5_Send_Byte(res); //用户自定义;
}
}
STM32串口——5个串口的使用方法
https://blog.51cto.com/u_14970037/5666911
相关文章:

STM32串口——5个串口的使用方法
参考文档 STM32串口——5个串口的使用方法_51CTO博客_stm32串口通信的接收与发送 串口是我们常用的一个数据传输接口,STM32F103系列单片机共有5个串口,其中1-3是通用同步/异步串行接口USART(Universal Synchronous/Asynchronous Receiver/Transmitter)…...

NVR接入录像回放平台EasyCVR视频融合平台加油站监控应用场景与实际功能
在现代社会中,加油站作为重要的能源供应点,面临着安全监管与风险管理的双重挑战。为应对这些问题,安防监控平台EasyCVR推出了一套全面的加油站监控方案。该方案结合了智能分析网关V4的先进识别技术和EasyCVR视频监控平台的强大监控功能&#…...

Ubuntu24.04安装gpfs客户端
文章目录 Ubuntu24.04安装gpfs客户端拷贝软件包在客户端执行命令,提取产品包进入安装包目录,安装相关产品包编译。编译过程中会检查系统依赖接入集群(后续) Ubuntu24.04安装gpfs客户端 拷贝软件包 scp /root/Spectrum_Scale_Dat…...

Android Framework层介绍
文章目录 前言一、Android Framework 层概述二、主要组件1. 应用程序接口(API)2. 系统服务3. Binder4. 资源管理5. Content Provider6. 广播接收器(BroadcastReceiver)7. 服务(Service) 三、与 Linux Kerne…...

如何利用 Puppeteer 的 Evaluate 函数操作网页数据
介绍 在现代的爬虫技术中,Puppeteer 因其强大的功能和灵活性而备受青睐。Puppeteer 是一个用于控制 Chromium 或 Chrome 浏览器的 Node.js 库,提供了丰富的 API 接口,能够帮助开发者高效地处理动态网页数据。本文将重点讲解 Puppeteer 的 ev…...

SpringMVC接收请求参数
(5)请求参数》五种普通参数 1.普通参数 代码块 RequestMapping("/commonParam") ResponseBody public String commonParam(String name,int age){System.out.println("普通参数传递 name > "name);System.out.println("普通…...

安宝特方案 | AR助力紧急救援,科技守卫生命每一刻!
在生死时速的紧急救援战场上,每一秒都至关重要!随着科技的发展,增强现实(AR)技术正在逐步渗透到医疗健康领域,改变着传统的医疗服务模式。 安宝特AR远程协助解决方案,凭借其先进的技术支持和创新…...

蓝桥杯每日真题 - 第18天
题目:(出差) 题目描述(13届 C&C B组E题) 解题思路: 问题分析 问题实质是一个带权图的最短路径问题,但路径的权重包含两个部分: 从当前城市到下一个城市的路程时间。 当前城市的…...

HTTP 协议应用场景
一、HTTP 协议简介 HTTP(Hypertext Transfer Protocol)即超文本传输协议,是用于分布式、协作式和超媒体信息系统的应用层协议,是互联网数据通信的基础。它采用客户端 - 服务器(Client-Server)的通信模式&am…...

【Linux庖丁解牛】—Linux基本指令(下)!
目录 1、grep指令 2、zip/unzip指令 3、sz/rz指令 4、tar指令 编辑 5、scp指令 6、bc指令 7、uname –r指令 8、重要的几个热键 9、关机 10、完结撒花 1、grep指令 grep是文本过滤器,其作用是在指定的文件中过滤出包含你指定字符串的内容,…...

python: generator model using sql server 2019
設計或生成好數據庫,可以生成自己設計好的框架項目 # encoding: utf-8 # 版权所有 :2024 ©涂聚文有限公司 # 许可信息查看 :言語成了邀功盡責的功臣,還需要行爲每日來值班嗎 # 描述: : 生成实体 # Author …...

Kafka怎么发送JAVA对象并在消费者端解析出JAVA对象--示例
1、在pom.xml中加入依赖 <dependency><groupId>org.springframework.cloud</groupId><artifactId>spring-cloud-starter-stream-kafka</artifactId><version>3.1.6</version></dependency> 2、配置application.yml 加入Kafk…...
)
深度学习(1)
一、torch的安装 基于直接设备情况,选择合适的torch版本,有显卡的建议安装GPU版本,可以通过nvidia-smi命令来查看显卡驱动的版本,在官网中根据cuda版本,选择合适的版本号,下面是安装示例代码 GPUÿ…...
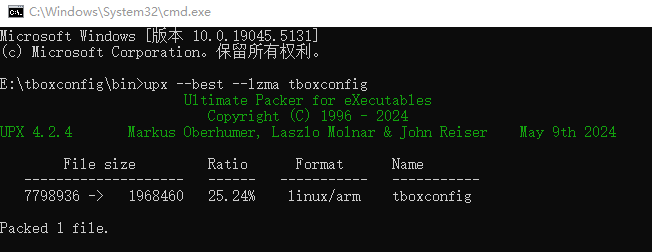
golang 嵌入式armv7l压缩编译打包
编译 Go 应用程序 go build -ldflags"-s -w" -o myapp.exe . 使用 UPX 压缩可执行文件(window下载并设置环境变量) upx --best --lzma myapp.exe 可从10M压缩到1M 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 …...

Makefile 之 join
join $(join <list1>,<list2> ) 名称:连接函数——join。 功能:把<list2>中的单词对应地加到<list1>的单词后面。如果<list1>的单词个数要比<list2>的多, 那么,<list1>中的多出…...

集合卡尔曼滤波(Ensemble Kalman Filter),用于二维滤波(模拟平面上的目标跟踪),MATLAB代码
集合卡尔曼滤波(Ensemble Kalman Filter) 文章目录 引言理论基础卡尔曼滤波集合卡尔曼滤波初始化预测步骤更新步骤卡尔曼增益更新集合 MATLAB 实现运行结果3. 应用领域结论 引言 集合卡尔曼滤波(Ensemble Kalman Filter, EnKF)是…...

北京申请中级职称流程(2024年)
想找个完整详细点的申请流程资料真不容易,做个分享送给需要的人吧。 不清楚为什么说文章过度宣传,把链接和页面去掉了,网上自己找一下。 最好用windows自带的EDGE浏览器打开申请网站,只有在开始申请的时间内才可以进行网上申报&…...

ubuntu.24安装cuda
1.下载CUDA Toolkit https://developer.nvidia.com/cuda-toolkit-archive 2.按照命令下载,安装 sudo sh cuda_12.2.2_535.104.05_linux.run 3.环境变量 sudo vi /etc/profile 最后面添加 export PATH“/usr/local/cuda-12.2/bin: P A T H " e x p o r t L D L…...

unity li2cpp逆向原理是什么?
主要涉及将Unity游戏引擎中的C#代码转换为C代码,并进一步编译为各平台的原生(Native)代码的过程,以及逆向工程工具如何利用这一过程中的特定文件来还原和分析原始代码。以下是对Unity IL2CPP逆向原理的详细解释: 对惹…...

Python网络爬虫实践案例:爬取猫眼电影Top100
以下是一个Python网络爬虫的实践案例,该案例将演示如何使用Python爬取猫眼电影Top100的电影名称、主演和上映时间等信息,并将这些信息保存到TXT文件中。此案例使用了requests库来发送HTTP请求,使用re库进行正则表达式匹配,并包含详…...
linux之kylin系统nginx的安装
一、nginx的作用 1.可做高性能的web服务器 直接处理静态资源(HTML/CSS/图片等),响应速度远超传统服务器类似apache支持高并发连接 2.反向代理服务器 隐藏后端服务器IP地址,提高安全性 3.负载均衡服务器 支持多种策略分发流量…...

React hook之useRef
React useRef 详解 useRef 是 React 提供的一个 Hook,用于在函数组件中创建可变的引用对象。它在 React 开发中有多种重要用途,下面我将全面详细地介绍它的特性和用法。 基本概念 1. 创建 ref const refContainer useRef(initialValue);initialValu…...
练习(含atoi的模拟实现,自定义类型等练习)
一、结构体大小的计算及位段 (结构体大小计算及位段 详解请看:自定义类型:结构体进阶-CSDN博客) 1.在32位系统环境,编译选项为4字节对齐,那么sizeof(A)和sizeof(B)是多少? #pragma pack(4)st…...

基于当前项目通过npm包形式暴露公共组件
1.package.sjon文件配置 其中xh-flowable就是暴露出去的npm包名 2.创建tpyes文件夹,并新增内容 3.创建package文件夹...
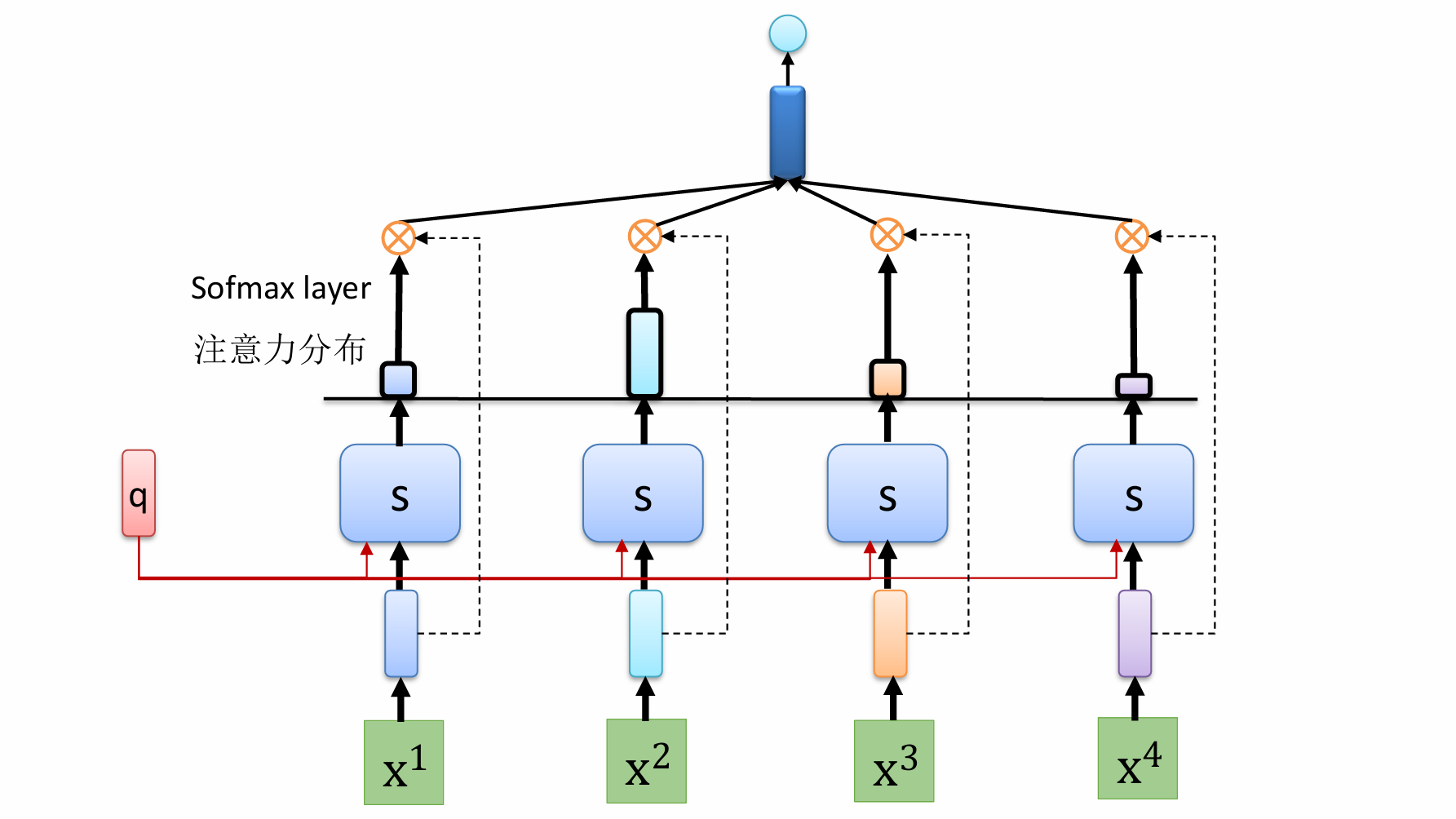
自然语言处理——循环神经网络
自然语言处理——循环神经网络 循环神经网络应用到基于机器学习的自然语言处理任务序列到类别同步的序列到序列模式异步的序列到序列模式 参数学习和长程依赖问题基于门控的循环神经网络门控循环单元(GRU)长短期记忆神经网络(LSTM)…...

第 86 场周赛:矩阵中的幻方、钥匙和房间、将数组拆分成斐波那契序列、猜猜这个单词
Q1、[中等] 矩阵中的幻方 1、题目描述 3 x 3 的幻方是一个填充有 从 1 到 9 的不同数字的 3 x 3 矩阵,其中每行,每列以及两条对角线上的各数之和都相等。 给定一个由整数组成的row x col 的 grid,其中有多少个 3 3 的 “幻方” 子矩阵&am…...

Linux --进程控制
本文从以下五个方面来初步认识进程控制: 目录 进程创建 进程终止 进程等待 进程替换 模拟实现一个微型shell 进程创建 在Linux系统中我们可以在一个进程使用系统调用fork()来创建子进程,创建出来的进程就是子进程,原来的进程为父进程。…...

力扣-35.搜索插入位置
题目描述 给定一个排序数组和一个目标值,在数组中找到目标值,并返回其索引。如果目标值不存在于数组中,返回它将会被按顺序插入的位置。 请必须使用时间复杂度为 O(log n) 的算法。 class Solution {public int searchInsert(int[] nums, …...

Ubuntu Cursor升级成v1.0
0. 当前版本低 使用当前 Cursor v0.50时 GitHub Copilot Chat 打不开,快捷键也不好用,当看到 Cursor 升级后,还是蛮高兴的 1. 下载 Cursor 下载地址:https://www.cursor.com/cn/downloads 点击下载 Linux (x64) ,…...
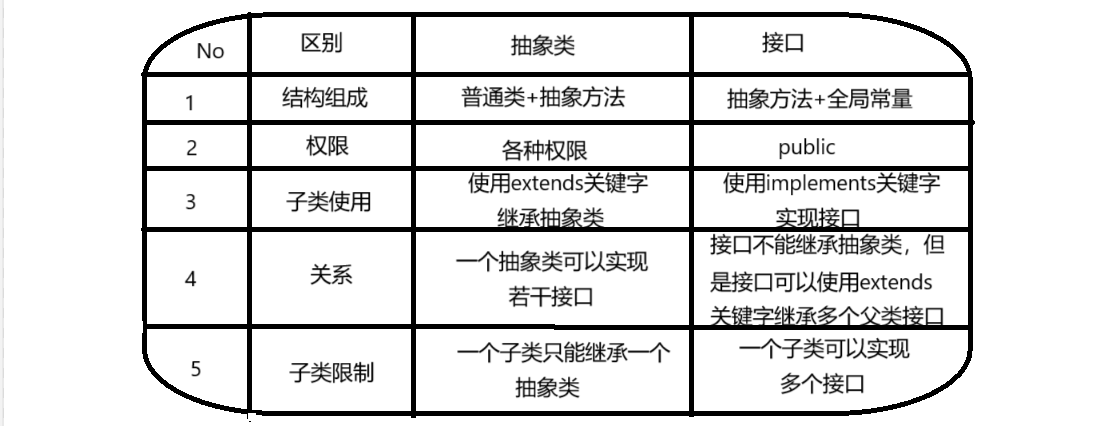
抽象类和接口(全)
一、抽象类 1.概念:如果⼀个类中没有包含⾜够的信息来描绘⼀个具体的对象,这样的类就是抽象类。 像是没有实际⼯作的⽅法,我们可以把它设计成⼀个抽象⽅法,包含抽象⽅法的类我们称为抽象类。 2.语法 在Java中,⼀个类如果被 abs…...