极智嘉嵌入式面试题及参考答案
对于交叉编译器的理解
交叉编译器是一种在一个计算机平台上为另一个不同架构的计算机平台生成可执行代码的编译器。它在嵌入式系统开发中起着关键作用。
从其必要性来看,嵌入式系统通常使用的处理器架构与我们日常使用的 PC 等通用计算机不同,如 ARM、MIPS 等。而我们开发嵌入式软件时,往往是在通用计算机上进行编写代码,这就需要交叉编译器将我们编写的高级语言代码转换为目标嵌入式平台能够理解和执行的机器码。
在功能特性上,交叉编译器不仅能进行代码的编译,还能处理不同架构之间的指令集差异、内存布局不同等问题。例如,将 C 语言代码编译成 ARM 架构的可执行文件时,它会根据 ARM 指令集的特点,把 C 语言的语句转化为相应的 ARM 指令序列,同时考虑到 ARM 芯片的内存映射情况,合理分配变量和代码的存储位置。
从使用流程上,首先要在开发主机上安装适合目标平台的交叉编译器工具链,然后在开发环境中配置好编译器的路径等相关参数。编写好代码后,通过指定交叉编译器的命令或在集成开发环境中设置使用交叉编译器,即可将代码编译成目标平台的可执行文件,最后将这个可执行文件下载到嵌入式设备中运行。
交叉编译器还能帮助进行调试和优化工作。它可以生成包含调试信息的可执行文件,方便开发人员在目标平台上进行调试。同时,根据目标平台的资源和性能特点,交叉编译器可以进行代码优化,如针对 ARM 芯片的流水线特性进行指令调度优化,提高程序的执行效率,以更好地适应嵌入式系统有限的资源和特定的性能要求 。
标准格式和扩展格式的区别
在不同的技术领域中,标准格式和扩展格式都有其特定的含义和区别,以下以 CAN 总线协议中的标准格式和扩展格式为例进行说明。
帧格式结构方面:CAN 标准格式的帧由起始位、仲裁场、控制场、数据场、CRC 校验场、应答场和结束位等组成。其中仲裁场包含 11 位标识符,用于确定数据传输的优先级和消息的标识。而 CAN 扩展格式的帧结构与标准格式相似,但仲裁场有所不同,扩展格式的仲裁场包含 29 位标识符,提供了更多的标识空间。
标识符数量和用途差异:由于标准格式的标识符只有 11 位,可表示的消息数量有限,适用于相对简单、节点数量较少且消息类型不太复杂的 CAN 网络。而扩展格式的 29 位标识符大大增加了可标识的消息数量,能够满足更复杂的网络拓扑和更多的消息类型需求。比如在一个大型的汽车电子系统中,如果有众多不同功能的电子控制单元,使用扩展格式可以更精细地区分各种控制指令和传感器数据等消息,避免标识符冲突。
兼容性和应用场景区别:标准格式由于其简洁性和早期的广泛应用,具有较好的兼容性,能在大多数支持 CAN 协议的传统设备和简单系统中使用。而扩展格式主要应用于对消息标识需求更复杂、需要传输更多数据以及网络规模较大的场合。例如在一些工业自动化生产线中,有大量的传感器、执行器和控制器需要相互通信,扩展格式能更好地满足其对消息区分和数据传输的要求。
11 位 / 29 位报文 ID
在 CAN 总线协议中,11 位和 29 位报文 ID 起着关键作用,且各有特点和应用场景。
11 位报文 ID
11 位的报文 ID 提供了 2048 种不同的标识值。它主要用于 CAN 标准格式的帧中,在一些相对简单的 CAN 网络中应用广泛。其优势在于简洁性和高效性,由于 ID 位数较少,在仲裁时所需的时间较短,能够快速确定消息的优先级和传输顺序。
例如在一个小型的汽车车身控制系统中,如车门控制、车窗控制等功能模块之间的通信,使用 11 位报文 ID 就可以满足需求。不同的车门或车窗控制消息可以分配不同的 ID,当多个消息同时竞争总线时,通过 ID 的仲裁机制,确保重要的控制消息,如紧急刹车信号对应的车门解锁消息等,能够优先传输。
29 位报文 ID
29 位的报文 ID 则大大增加了消息的标识范围,可提供高达 536870912 种不同的标识值。它用于 CAN 扩展格式的帧,适用于复杂的网络环境和对消息区分度要求高的系统。
在大型的工业自动化系统或智能交通系统中,有大量的设备和多种类型的数据需要在 CAN 总线上传输,29 位报文 ID 就能发挥其优势。比如不同类型的传感器数据、不同区域的交通信号灯控制指令等,通过 29 位 ID 可以更精确地进行标识和区分,避免在复杂网络中出现消息 ID 冲突的情况,从而保证系统的稳定可靠运行和数据的准确传输 。
关于芯片和传感器之间的事情种种
芯片和传感器在嵌入式系统中紧密合作,共同实现各种功能,以下是它们之间的一些关键联系和相关事宜。
硬件连接方面:芯片通常作为嵌入式系统的核心控制单元,与传感器之间需要通过特定的接口进行物理连接。常见的连接方式有 I2C 接口、SPI 接口、模拟输入接口等。例如,许多温度传感器通过 I2C 接口与微控制器芯片相连,芯片通过 I2C 总线向传感器发送配置指令和读取温度数据。而一些模拟量输出的传感器,如某些压力传感器,则通过模拟输入引脚连接到芯片的 ADC(模拟数字转换器)输入通道,以便芯片将传感器输出的模拟信号转换为数字信号进行处理。
数据交互方面:传感器负责采集各种物理量或环境信息,并将其转换为电信号或数字信号。芯片则对传感器传来的信号进行接收、处理和分析。对于数字传感器,芯片通过相应的通信协议接收数据,如通过 SPI 接口接收加速度传感器传来的加速度数据。对于模拟传感器,芯片要先进行模数转换,再对转换后的数字数据进行进一步处理,如对光电传感器采集到的光强数据进行滤波、放大等操作,以获取准确有用的信息。
电源供应方面:芯片需要为传感器提供合适的电源。有些传感器可以直接使用芯片的电源引脚供电,而有些对电源要求较高的传感器则需要外部的独立电源,芯片需要对这些电源进行合理的管理和控制,确保传感器能够正常工作。
协同工作与功能实现:芯片和传感器协同工作以实现特定的系统功能。例如在一个智能家居系统中,温湿度传感器与微控制器芯片配合,实时采集室内的温湿度数据,芯片根据这些数据控制空调和加湿器等设备的运行状态,以维持室内舒适的环境。同时,芯片还可以对传感器进行配置和校准,以优化传感器的性能和提高数据的准确性,确保整个系统的稳定可靠运行 。
上位机和单片机通信通常采用什么通信协议?
上位机和单片机通信时,常用的通信协议有多种,以下是一些常见的协议:
- UART/USART 协议
- 特点:UART(通用异步收发器)和 USART(通用同步异步收发器)是一种简单且广泛应用的串行通信协议。它仅使用两根线,即发送线和接收线,就能实现数据的全双工传输。数据以字符为单位进行传输,每个字符包含起始位、数据位、奇偶校验位和停止位,传输格式较为灵活。
- 应用场景:常用于近距离、低速率的数据传输,如在一些简单的测控系统中,上位机通过 UART 与单片机连接,实现对传感器数据的采集和控制指令的下达。
- SPI 协议
- 特点:SPI 是一种高速的全双工串行通信协议。它需要至少四根线,分别是主设备输出从设备输入线(MOSI)、主设备输入从设备输出线(MISO)、时钟线(SCLK)和片选线(SS)。SPI 协议的传输速度快,数据传输效率高,且可以同时连接多个从设备。
- 应用场景:适用于对传输速度要求较高的场合,如在一些需要快速采集大量数据的嵌入式系统中,如高速 ADC 与单片机之间的通信,或者在液晶显示屏与单片机的连接中,SPI 协议常被用于快速传输图像数据等。
- I2C 协议
- 特点:I2C 是一种多主从的串行通信协议,它使用两根线,即数据线(SDA)和时钟线(SCL),可以连接多个设备。I2C 协议具有简单、占用引脚少、支持多设备等优点,同时还能在总线上实现设备的寻址和数据的传输。
- 应用场景:在一些需要连接多个低速设备的系统中应用广泛,如在智能家居系统中,单片机通过 I2C 协议与多个温湿度传感器、光照传感器等进行通信,实现对环境参数的采集。
- CAN 协议
- 特点:CAN(控制器局域网络)是一种可靠性高、实时性强的串行通信协议。它最初是为汽车电子系统设计的,具有多主站、差分信号传输、错误检测和仲裁等特点,能够在恶劣的电气环境下保证数据的可靠传输。
- 应用场景:常用于工业自动化控制、汽车电子、智能建筑等领域,如在汽车的电子控制系统中,多个电子控制单元(ECU)通过 CAN 总线相互通信,实现对发动机、变速器、车身等各个系统的协同控制。
RS232 和 RS485 的区别是什么?RS485 如果是差分的方式,那么是如何进行传输方向判定的?
RS232 和 RS485 的区别
- 电气特性
- RS232:采用单端信号传输,其信号电平与 TTL(晶体管 - 晶体管逻辑)电平不兼容,逻辑 0 通常规定为 + 3V 至 + 15V 之间,逻辑 1 规定为 - 3V 至 - 15V 之间,需要专门的电平转换芯片进行电平转换,如 MAX232 芯片,且传输距离较短,一般不超过 15 米,传输速率也相对较低,最高为 20kbps 左右 。
- RS485:采用差分信号传输,使用一对双绞线,其中一条线为 A 线,另一条线为 B 线。逻辑 0 以两线间的电压差为 + 2V 至 + 6V 表示,逻辑 1 以两线间的电压差为 - 2V 至 - 6V 表示。它的电平与 TTL 电平兼容,无需额外的电平转换芯片,传输距离较远,可达 1200 米左右,传输速率也较高,最高可达 10Mbps。
- 连接方式
- RS232:一般为一对一的连接方式,即一个发送端对应一个接收端,常用于计算机与外部设备的短距离通信,如计算机与调制解调器、鼠标等的连接。
- RS485:支持多个设备连接在同一条总线上,形成一个多节点的网络,可实现一点对多点的通信,常用于工业控制领域,如多个传感器、执行器与控制器之间的通信。
- 抗干扰能力
- RS232:由于采用单端信号传输,容易受到外界干扰,在长距离传输或电气环境复杂的情况下,信号衰减和干扰问题较为严重。
- RS485:差分信号传输方式使其具有较强的抗干扰能力,两根传输线上的干扰信号通常会同时出现,在接收端通过差分放大和比较,能够有效地去除共模干扰,保证信号的准确性和可靠性。
RS485 差分方式传输方向判定
在 RS485 网络中,传输方向的判定主要通过以下几种方法:
- 硬件控制方式
- 使用方向控制引脚:许多 RS485 收发器芯片都带有专门的方向控制引脚。当主设备要发送数据时,它会将方向控制引脚设置为发送状态,此时收发器处于发送模式,将数据发送到总线上;当主设备要接收数据时,将方向控制引脚设置为接收状态,收发器则处于接收模式,接收总线上的数据。
- 自动方向控制:一些高级的 RS485 收发器芯片具备自动方向控制功能。这种芯片可以通过检测总线上的信号变化来自动判断传输方向。例如,当芯片检测到总线上有起始位出现时,它会自动切换到接收模式;当检测到总线上没有信号活动一段时间后,会自动切换回发送模式,等待下一次发送操作。
- 软件协议方式
- 基于地址的协议:在 RS485 网络中,可以通过软件定义的协议来实现传输方向的判定。例如,在一个多节点的系统中,每个设备都被分配一个唯一的地址。当主设备要与某个从设备通信时,它会先发送包含目标设备地址的数据包。所有从设备都会接收这个数据包,并与自己的地址进行比较。如果地址匹配,则该从设备准备接收后续的数据,此时传输方向为主设备到从设备;如果从设备需要向主设备发送数据,它会在等待主设备允许发送的信号后,再将数据发送出去,此时传输方向为从设备到主设备。
- 令牌传递协议:采用令牌传递的方式来控制传输方向。在网络中,只有拥有令牌的设备才能发送数据,当一个设备发送完数据后,它会将令牌传递给下一个设备。通过这种方式,有序地轮流控制传输方向,避免了数据冲突和传输混乱。
如何在嵌入式系统中实现蓝牙通信?
在嵌入式系统中实现蓝牙通信,一般需要以下几个关键步骤:
- 硬件准备
- 选择合适的蓝牙模块:根据嵌入式系统的需求和性能要求,选择合适的蓝牙模块。常见的蓝牙模块有经典蓝牙模块和低功耗蓝牙模块。经典蓝牙模块适用于对传输速率要求较高、数据量较大的应用,如音频传输;低功耗蓝牙模块则更适合于对功耗要求严格、数据传输频率不高的应用,如传感器数据采集。
- 连接硬件接口:将蓝牙模块与嵌入式系统的微控制器进行连接。一般来说,蓝牙模块会提供一些标准的接口,如 UART、SPI 或 I2C 接口,通过这些接口与微控制器进行通信。例如,通过 UART 接口,微控制器可以向蓝牙模块发送 AT 指令,配置蓝牙模块的工作模式、参数等。
- 软件配置
- 蓝牙协议栈的移植:嵌入式系统需要运行蓝牙协议栈来实现蓝牙通信的各种功能。可以选择一些开源的蓝牙协议栈,如 BlueZ、btstack 等,根据嵌入式系统的硬件平台和操作系统进行移植。在移植过程中,需要配置相关的参数,如蓝牙设备的名称、地址、配对模式等。
- 驱动程序开发:编写蓝牙模块的驱动程序,实现与蓝牙协议栈的对接。驱动程序主要负责初始化蓝牙模块、发送和接收数据、处理蓝牙模块的中断等。通过驱动程序,嵌入式系统可以方便地控制蓝牙模块的工作状态,实现数据的传输。
- 功能实现
- 设备配对与连接:在嵌入式系统中,通过蓝牙协议栈和驱动程序,实现与其他蓝牙设备的配对和连接。可以设置蓝牙设备为可见模式,等待其他设备的搜索和配对请求,或者主动搜索周围的蓝牙设备并发起配对请求。配对成功后,建立蓝牙连接,为数据传输做好准备。
- 数据传输:一旦蓝牙连接建立成功,就可以在嵌入式系统和其他蓝牙设备之间进行数据传输。可以根据应用需求,定义数据传输的格式和协议。例如,在一个智能健康监测系统中,嵌入式系统中的传感器采集到人体的心率、血压等数据后,通过蓝牙模块将数据发送给手机等移动设备进行显示和分析。
使用 USB 接口与外部设备进行数据传输的方法是什么?
在嵌入式系统中,使用 USB 接口与外部设备进行数据传输主要有以下几种方法:
- USB 设备模式
- 作为从设备:嵌入式系统可以作为 USB 从设备与主机进行通信。在这种模式下,嵌入式系统需要实现 USB 从设备协议栈,响应主机的各种请求,如设备枚举、配置、数据传输等。首先,要对 USB 控制器进行初始化,设置设备的端点描述符、配置描述符等参数,向主机表明设备的功能和特性。然后,根据主机的请求,进行数据的发送和接收。例如,当嵌入式系统作为一个 USB 存储设备时,主机会向其发送读取或写入数据的请求,嵌入式系统则按照 USB 存储设备协议,将存储的数据发送给主机或接收主机发送的数据并存储到相应的位置。
- 选择合适的 USB 类:USB 从设备可以根据自身的功能选择不同的 USB 类。常见的 USB 类有大容量存储类、人机接口设备类(HID)、通信设备类等。如果嵌入式系统主要用于数据存储,可选择大容量存储类;如果用于与用户进行交互,如鼠标、键盘等功能,可选择 HID 类;如果用于实现通信功能,如调制解调器、串口等,则可选择通信设备类。通过选择合适的 USB 类,可以简化设备驱动程序的开发,提高设备的兼容性。
- USB 主机模式
- 作为主设备:嵌入式系统也可以作为 USB 主机,主动与其他 USB 从设备进行连接和通信。在这种模式下,嵌入式系统需要具备 USB 主机控制器和相应的主机驱动程序。首先,要对 USB 主机控制器进行初始化,扫描总线上的 USB 从设备,进行设备的枚举和配置。然后,根据从设备的类型和功能,与从设备建立通信通道,进行数据的传输。例如,在一个嵌入式工业控制计算机中,作为 USB 主机,它可以连接多个 USB 从设备,如打印机、扫描仪、U 盘等,实现对这些设备的控制和数据交互。
- 驱动多种 USB 设备:由于 USB 从设备的种类繁多,作为 USB 主机的嵌入式系统需要具备支持多种 USB 设备的能力。这就需要开发相应的设备驱动程序或使用一些通用的 USB 设备驱动框架。对于一些常见的 USB 设备,可以直接使用已有的驱动程序进行适配;对于一些特殊的 USB 设备,则需要根据设备的协议和功能,开发专门的驱动程序。
- USB OTG 模式
- 灵活的角色切换:USB OTG(On-The-Go)模式允许嵌入式系统在 USB 设备和 USB 主机两种角色之间灵活切换。在这种模式下,嵌入式系统既可以作为 USB 从设备与其他 USB 主机进行通信,也可以作为 USB 主机与其他 USB 从设备进行连接。通过检测 USB 接口的连接情况和设备的角色需求,自动切换 USB 工作模式,实现与不同类型 USB 设备的交互。
- 简化连接方式:USB OTG 模式简化了嵌入式系统与外部设备的连接方式,无需额外的 USB 集线器或转接器等设备。例如,在一个便携式的嵌入式设备中,通过 USB OTG 接口,可以直接连接 U 盘进行数据存储和读取,也可以连接鼠标、键盘等进行用户操作,提高了设备的便携性和通用性。
如何使用 LoRa 进行远程数据传输?
使用 LoRa 进行远程数据传输,一般需要以下步骤:
- 硬件选型与连接
- 选择合适的 LoRa 模块:根据传输距离、数据速率、功耗等需求,选择合适的 LoRa 模块。市面上有多种 LoRa 模块可供选择,不同的模块在性能和功能上有所差异。例如,一些模块侧重于长距离传输,适合于远距离的传感器数据采集;一些模块则注重低功耗,适用于电池供电的设备。
- 与微控制器连接:将 LoRa 模块与嵌入式系统的微控制器进行连接。通常,LoRa 模块会提供一些接口,如 SPI、UART 等,通过这些接口与微控制器进行通信。以 SPI 接口为例,微控制器可以通过 SPI 总线向 LoRa 模块发送配置指令和数据,同时接收 LoRa 模块返回的数据和状态信息。
- 软件配置与初始化
- 配置 LoRa 参数:通过微控制器向 LoRa 模块发送配置指令,设置 LoRa 的工作参数,如频率、扩频因子、发射功率、带宽等。这些参数的选择直接影响到 LoRa 模块的传输性能和距离。例如,降低数据速率、增加扩频因子可以提高传输距离,但会降低数据传输的实时性;提高发射功率可以增加传输距离,但会增加功耗。
- 初始化 LoRa 模块:在配置完参数后,对 LoRa 模块进行初始化操作,使其进入工作状态。这包括启动 LoRa 模块的射频电路、设置工作模式等。初始化完成后,LoRa 模块就可以准备进行数据传输了。
- 数据处理与传输
- 数据准备:在嵌入式系统中,收集需要传输的数据,如传感器采集到的环境数据、设备的状态数据等。对这些数据进行必要的处理和封装,形成适合 LoRa 传输的数据包格式。例如,可以在数据包中添加数据的来源、时间戳、校验和等信息,以提高数据的完整性和可靠性。
- 数据发送与接收:使用微控制器通过与 LoRa 模块的接口,将准备好的数据发送给 LoRa 模块,LoRa 模块会将数据以无线信号的形式发送出去。在接收端,另一个 LoRa 模块接收到信号后,将数据传输给相应的微控制器。微控制器对收到的数据进行解析和处理,提取出有用的信息。例如,在一个远程环境监测系统中,多个传感器节点通过 LoRa 模块将采集到的温度、湿度、空气质量等数据发送给中心节点,中心节点对数据进行分析和处理,实现对环境的实时监测。
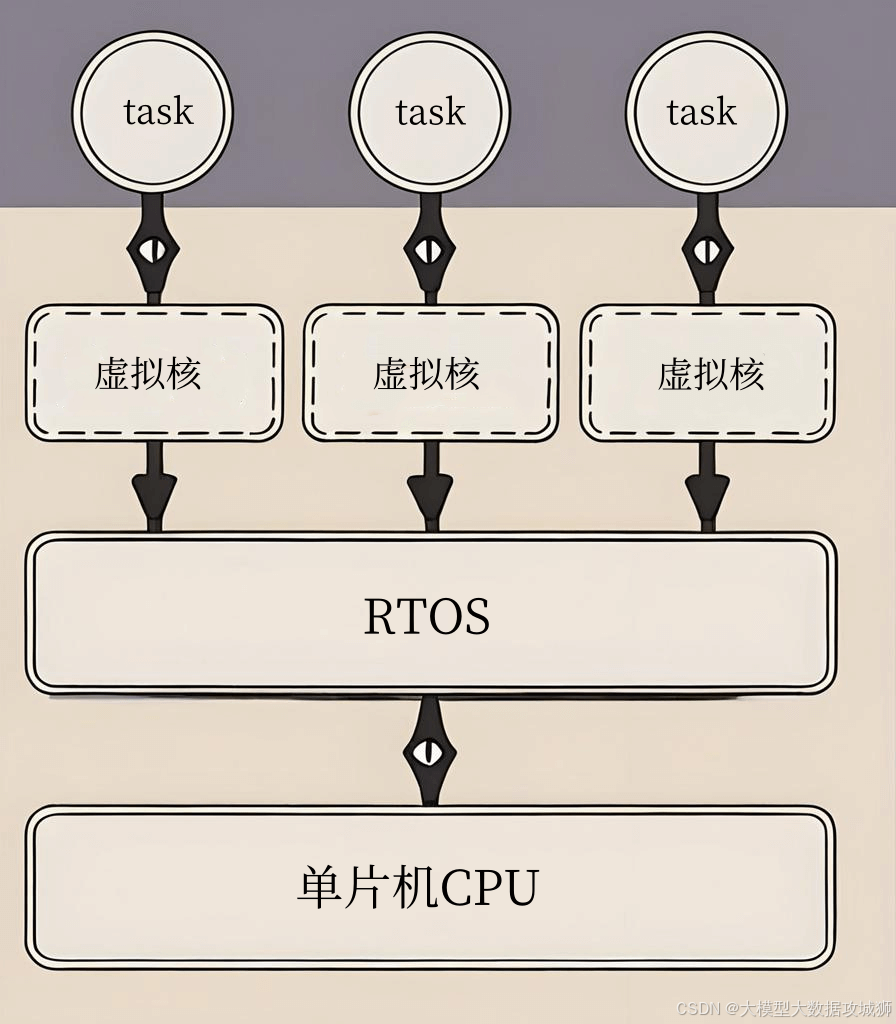
为什么会在项目中使用 RTOS?请举例说明。
实时操作系统(RTOS)在嵌入式项目中具有诸多优势,因此被广泛应用。
- 任务管理与调度
- RTOS 能够高效地管理多个任务,合理分配系统资源。例如在一个智能监控系统中,需要同时进行视频采集、图像分析、数据传输以及用户界面交互等任务。RTOS 可以为每个任务分配不同的优先级和时间片,确保高优先级的任务如视频采集和图像分析能及时执行,不会因为其他低优先级任务而阻塞,保证了系统的实时性和流畅性。
- 资源共享与同步
- 多个任务可能会共享一些系统资源,如内存、外设等。RTOS 提供了有效的资源共享和同步机制,避免了资源冲突。以工业自动化控制系统为例,多个控制任务可能都需要访问同一个传感器或执行器,通过 RTOS 的信号量、互斥锁等机制,可以确保同一时刻只有一个任务能够访问这些资源,防止数据错误和系统不稳定。
- 实时响应性
- 对于一些对时间敏感的应用,RTOS 能够保证任务在规定的时间内完成。比如在汽车的电子控制单元(ECU)中,发动机的喷油控制、点火控制等任务都有严格的时间要求。RTOS 可以精确地按照时间表调度这些任务,确保发动机的正常运行,提高燃油效率和动力性能。
- 可扩展性和维护性
- 当项目规模扩大或功能增加时,RTOS 方便进行系统的扩展和维护。例如在智能家居系统中,随着接入设备的增多,各种设备的控制和数据处理任务变得复杂。使用 RTOS 可以方便地添加新的任务和功能模块,而不会对现有系统造成太大的影响,降低了系统开发和维护的难度。
使用 GPIO 控制步进电机的运动的方法是什么?
使用 GPIO 控制步进电机运动主要有以下方法:
- 硬件连接
- 首先要将步进电机的各相绕组与微控制器的 GPIO 引脚相连。通常,步进电机有四相或两相绕组,分别连接到不同的 GPIO 引脚。例如,对于一个四相步进电机,将其 A 相、B 相、C 相、D 相依次连接到微控制器的四个 GPIO 引脚。同时,还需要考虑电机的驱动电路,如果电机功率较大,可能需要外接驱动器,如 ULN2003 等芯片,以提供足够的电流和电压来驱动电机。
- 控制信号生成
- 通过微控制器的 GPIO 口输出特定的脉冲序列来控制步进电机的转动。以四相步进电机的四拍工作模式为例,其转动一圈需要的脉冲序列是 A 相先通电,然后 B 相通电,接着 C 相通电,最后 D 相通电,这样依次循环,电机就会按照一定的方向转动。可以使用软件编程来生成这样的脉冲序列,通过控制 GPIO 引脚的电平高低来模拟脉冲信号。
- 转速和方向控制
- 转速控制可以通过调整脉冲信号的频率来实现。频率越高,电机转速越快;频率越低,电机转速越慢。例如,在一定时间内输出的脉冲数量越多,电机转动的角度就越大,从而实现了转速的调节。方向控制则可以通过改变脉冲序列的顺序来实现。如果按照 A-B-C-D 的顺序通电是正转,那么按照 D-C-B-A 的顺序通电,电机就会反转。
- 细分控制
- 为了提高步进电机的控制精度,还可以采用细分控制技术。细分控制是通过在相邻相之间插入多个中间状态来实现的。例如,将每一步细分为 4 个或 8 个小步,这样可以使电机的转动更加平稳,定位更加准确。这需要更复杂的控制算法和更精确的脉冲信号生成,但可以有效提高电机的性能。
嵌入式系统中如何实现看门狗定时器?
在嵌入式系统中,实现看门狗定时器主要有以下几种方式:
- 硬件看门狗定时器
- 利用专用芯片:许多微控制器都集成了硬件看门狗定时器模块。通过对其进行配置,可以设置定时时间和工作模式。例如,设置定时时间为 1 秒,当系统正常运行时,需要在 1 秒内不断地对看门狗定时器进行复位操作,也就是俗称的 “喂狗”。如果在规定时间内没有 “喂狗”,看门狗定时器就会触发系统复位,防止系统因程序跑飞或陷入死循环等异常情况而无法正常工作。
- 外部看门狗芯片:当微控制器内部没有集成看门狗定时器或者需要更复杂的看门狗功能时,可以使用外部看门狗芯片。如 MAX706 等芯片,它与微控制器通过特定的引脚相连,微控制器同样需要按照一定的时间间隔向其发送复位信号。外部看门狗芯片通常具有一些额外的功能,如电源监测、手动复位等,可以进一步增强系统的可靠性。
- 软件看门狗定时器
- 基于定时器中断:在没有硬件看门狗定时器的情况下,可以利用微控制器的定时器中断来实现软件看门狗定时器。通过设置定时器的定时时间,在定时器中断服务程序中设置一个计数器。当系统正常运行时,在每个定时器中断中对计数器进行清零操作。同时,在主程序的关键位置也对计数器进行检查和清零。如果计数器的值超过了设定的阈值,说明系统出现了异常,此时可以采取相应的措施,如进行系统复位或发出错误提示。
- 多任务系统中的应用:在多任务的嵌入式系统中,软件看门狗定时器可以与任务调度相结合。每个任务在执行过程中都有一定的时间限制,当某个任务执行时间过长时,可能会导致系统整体性能下降或出现异常。通过软件看门狗定时器,可以监控每个任务的执行时间,当任务超时未完成时,采取相应的处理措施,如暂停该任务、重新启动任务或进行系统级的调整。
使用 PWM 控制直流电机的速度的方法是什么?
使用 PWM(脉冲宽度调制)控制直流电机速度主要包括以下方面:
- 硬件连接
- 将直流电机与微控制器通过合适的驱动电路连接,常见的驱动电路有 H 桥电路等。微控制器的 PWM 输出引脚连接到驱动电路的控制端。例如,对于一个基于 L298N 芯片的 H 桥驱动电路,微控制器的 PWM 引脚连接到 L298N 的使能引脚,通过控制该引脚的 PWM 信号来调节电机的速度。同时,还需要连接电源和接地等线路,确保电机和驱动电路能够正常工作。
- PWM 信号生成
- 微控制器内部通常具有专门的 PWM 模块,可以通过配置相关寄存器来生成 PWM 信号。需要设置 PWM 的频率和占空比。频率决定了 PWM 信号的周期,一般根据电机的特性和应用需求来选择合适的频率,通常在几十赫兹到几十千赫兹之间。占空比则决定了电机的平均电压,从而控制电机的速度。占空比越大,电机两端的平均电压越高,电机转速越快;反之,电机转速越慢。
- 速度调节算法
- 可以采用多种速度调节算法来实现更精确的速度控制。例如,采用 PID(比例 - 积分 - 微分)控制算法,根据电机的实际速度与目标速度的差值,通过比例、积分、微分三个环节的计算,实时调整 PWM 的占空比,使电机的速度快速且稳定地达到目标值。在一些简单的应用中,也可以采用简单的比例控制算法,根据速度差值直接调整占空比。
- 方向控制
- 除了速度控制,还可以通过改变直流电机的电流方向来控制电机的转动方向。在 H 桥驱动电路中,通过控制不同的引脚电平,可以使电机正转或反转。例如,当控制信号使电流从电机的一端流入,另一端流出时,电机正转;反之,当电流方向改变时,电机反转。可以将方向控制信号与 PWM 信号相结合,实现对电机速度和方向的同时控制。
嵌入式系统中如何实现电源管理?
嵌入式系统中的电源管理对于系统的性能、稳定性和续航能力等方面都至关重要,主要通过以下几种方式实现:
- 电源选择与设计
- 选择合适的电源芯片:根据嵌入式系统的功耗需求和供电要求,选择合适的电源管理芯片,如线性稳压芯片、开关稳压芯片等。线性稳压芯片具有输出纹波小、电路简单等优点,适用于对电源噪声要求较高、功耗较低的系统;开关稳压芯片则效率更高,能够适应较大的电流变化和负载波动,常用于对功耗和效率要求较高的系统。
- 多电源设计:对于一些复杂的嵌入式系统,可能需要多种不同电压的电源。例如,微控制器可能需要 3.3V 电源,而一些外设可能需要 5V 电源。这时可以采用多电源芯片或电源模块,将输入电源转换为不同的输出电压,以满足各个模块的需求。同时,要合理规划电源的布线,减少电源噪声和干扰。
- 功耗控制策略
- 动态电压调节(DVS):根据系统的负载情况动态地调整电源电压。当系统处于低负载或空闲状态时,降低电源电压,从而降低系统的功耗;当系统负载增加时,再适当提高电源电压,以保证系统的正常运行。这种方式需要微控制器和电源管理芯片的支持,通过软件和硬件的协同实现。
- 时钟管理:降低系统的时钟频率可以有效地减少功耗。在嵌入式系统中,可以根据任务的实时性要求,动态地调整时钟频率。例如,当系统执行一些对时间不敏感的任务时,如数据采集和存储,可以降低时钟频率;当需要执行实时性要求较高的任务时,再提高时钟频率,以满足系统的性能要求。
- 低功耗模式应用
- 睡眠模式和待机模式:微控制器通常具有多种低功耗模式,如睡眠模式和待机模式。在睡眠模式下,系统的部分功能模块关闭,只保留一些必要的外设和中断功能,以降低功耗。当有中断事件发生时,系统可以快速唤醒,恢复正常运行。待机模式则是一种更深层次的低功耗模式,系统几乎关闭所有的功能,只有一些特殊的引脚或模块处于监控状态,等待外部唤醒信号。
- 外设的低功耗配置:除了微控制器,嵌入式系统中的外设也可以进行低功耗配置。例如,对于一些传感器,可以设置其工作在低功耗的间歇模式,定期进行数据采集,而不是连续采集,以减少功耗。对于无线通信模块,在不需要通信时,可以将其置于睡眠状态,降低其发射功率或关闭其射频电路。
使用中断响应传感器数据采集事件的方法是什么?
在嵌入式系统中,使用中断响应传感器数据采集事件是一种高效的方式,具体方法如下:
- 中断初始化
- 首先需要对微控制器的中断系统进行初始化设置。这包括配置中断优先级、使能相应的中断向量等。不同的微控制器其中断初始化的过程有所不同,但一般都需要通过设置相关的寄存器来完成。例如,对于某些 ARM Cortex-M 系列微控制器,要设置 NVIC(嵌套向量中断控制器)的相关寄存器,确定每个中断的优先级和使能状态。
- 传感器与中断的关联
- 将传感器的中断输出引脚连接到微控制器的中断输入引脚。确保传感器的中断触发条件与系统需求相匹配。有些传感器在数据准备好时会触发一个电平变化或脉冲信号作为中断请求,如外部中断触发方式可以是上升沿触发、下降沿触发或双边沿触发等。以温度传感器为例,如果它在温度数据更新后通过引脚输出一个上升沿信号,那么就将微控制器的对应中断引脚配置为上升沿触发模式。
- 中断服务程序编写
- 当中断发生时,微控制器会跳转到相应的中断服务程序(ISR)去执行。在中断服务程序中,需要完成对传感器数据的采集和处理。首先读取传感器的数据寄存器,获取传感器采集到的最新数据。然后可以进行一些必要的数据处理,如数据滤波、单位转换等。例如,对于一个光照强度传感器,在中断服务程序中读取其数据后,可能需要将原始数据转换为实际的光照强度值,并进行简单的滤波处理以去除噪声。
- 中断嵌套与优先级处理
- 如果系统中有多个中断源,需要合理设置中断优先级,以确保重要的传感器数据采集事件能够及时得到响应。高优先级的中断可以打断低优先级的中断执行,从而保证对实时性要求高的传感器数据的及时处理。比如在一个同时有温度传感器和烟雾传感器的系统中,如果烟雾传感器的数据对于系统的安全性更为关键,那么可以将烟雾传感器的中断优先级设置得更高。
在嵌入式系统中如何实现数据压缩?
在嵌入式系统中实现数据压缩可以从软件和硬件两个方面考虑,以下是具体方法:
- 软件压缩算法
- 选择合适的算法:根据数据的特点和应用需求选择合适的压缩算法。常见的有霍夫曼编码、游程编码、LZW 编码等无损压缩算法,以及基于离散余弦变换(DCT)的 JPEG 压缩、基于小波变换的压缩等有损压缩算法。例如,对于一些传感器采集的文本数据或配置文件,无损压缩算法如霍夫曼编码可以在不丢失数据的前提下有效减少数据量。
- 算法实现与优化:将选定的压缩算法在嵌入式系统中实现,这可能需要根据微控制器的性能和资源进行优化。可以采用一些高效的编程技巧和数据结构来提高算法的执行效率。比如在实现霍夫曼编码时,合理构建霍夫曼树,减少内存占用和计算时间。同时,对于一些复杂的算法,可以进行适当简化或采用近似算法以适应嵌入式系统的资源有限性。
- 硬件压缩模块
- 利用专用芯片:有些嵌入式系统可以使用专门的硬件压缩芯片来实现数据压缩。这些芯片具有专门的压缩引擎,能够快速高效地完成数据压缩任务。例如,在一些视频监控系统中,使用 H.264/H.265 视频压缩芯片,可以实时对视频数据进行压缩,减轻微控制器的负担,提高系统的整体性能。
- 微控制器内置模块:部分微控制器本身集成了硬件数据压缩模块,如某些 ARM Cortex-M 系列微控制器具有硬件加密与压缩引擎(CCE)。通过配置相关寄存器,就可以使用这些内置模块进行数据压缩。使用硬件模块可以大大提高压缩速度,降低微控制器的 CPU 占用率,使系统能够同时处理更多的任务。
- 数据预处理与后处理
- 预处理:在进行数据压缩之前,可以对数据进行一些预处理操作,以提高压缩效果。如对数据进行归一化处理、去除冗余信息等。以图像数据为例,在压缩之前可以先进行色彩空间转换和图像裁剪,去除图像中的无用信息,然后再进行压缩,这样可以减少压缩后的数据量。
- 后处理:压缩后的数据在使用之前可能需要进行后处理,如解压缩、数据还原等。确保解压缩过程的正确性和高效性也是实现数据压缩的重要环节。对于一些实时性要求较高的数据,如音频数据,需要在短时间内完成解压缩并播放,这就需要对解压缩算法和硬件进行优化。
你在项目中使用的 ADC 是什么样的?如何进行 ADC 的选型?
在项目中使用的 ADC(模数转换器)类型多样,以下是常见的情况以及 ADC 选型的要点:
- 常见 ADC 类型及特点
- 逐次逼近型 ADC(SAR ADC):它是一种中速、中精度的 ADC,通过逐次比较的方式将模拟信号转换为数字信号。其优点是结构简单、成本低、功耗低,适用于对转换速度要求不高、精度要求一般的场合。例如在一些简单的温度测量系统中,使用 SAR ADC 采集温度传感器的模拟信号,将其转换为数字信号后送给微控制器进行处理。
- Σ-Δ 型 ADC:这种 ADC 以高分辨率和高精度著称,通过过采样和噪声整形技术实现。它对模拟输入信号进行高速采样,然后通过数字滤波等处理得到高精度的数字输出。常用于对精度要求高的音频信号处理、传感器测量等领域。比如在一些高精度的压力传感器测量系统中,Σ-Δ 型 ADC 能够准确地将微小的压力变化转换为数字信号。
- 流水线型 ADC:流水线型 ADC 具有较高的转换速度,能够在短时间内完成多次采样和转换。它由多个级联的子 ADC 和数字校正电路组成,适合于高速数据采集系统,如视频信号处理、雷达信号处理等。不过其功耗和成本相对较高。
- ADC 选型要点
- 精度要求:根据项目对测量精度的要求选择合适的 ADC。如果需要测量非常精确的物理量,如高精度的电压、电流或传感器信号,就需要选择高分辨率的 ADC,如 12 位、14 位甚至更高分辨率的 Σ-Δ 型 ADC。而对于一些精度要求不高的开关量检测或粗略的模拟量测量,8 位或 10 位的 SAR ADC 可能就足够了。
- 转换速度:考虑系统对数据采集速度的需求。对于快速变化的信号,如高频信号测量、高速运动的物体检测等,需要选择转换速度快的 ADC,如流水线型 ADC。而对于缓慢变化的信号,如环境温度、湿度测量等,转换速度较慢的 SAR ADC 或 Σ-Δ 型 ADC 就可以满足要求。
- 输入信号范围和类型:确定模拟输入信号的范围和类型,选择与之匹配的 ADC。有些 ADC 的输入信号范围是固定的,如 0 - 5V 或 0 - 3.3V,而有些 ADC 可以接受更宽的输入范围。同时,要考虑输入信号是单端信号还是差分信号,选择相应的 ADC 输入模式。
- 功耗和成本:在满足性能要求的前提下,尽量选择功耗低、成本低的 ADC。对于电池供电的嵌入式系统,低功耗的 ADC 尤为重要,可以延长系统的续航时间。同时,根据项目的预算和成本控制要求,综合考虑 ADC 的价格和性价比。
为什么要使用两路 ADC 进行采样?请举例说明。
在嵌入式系统中,使用两路 ADC 进行采样有诸多优势,以下是具体原因和示例:
- 提高采样效率
- 当系统需要同时采集多个模拟信号时,使用两路 ADC 可以并行进行采样,大大提高了采样效率。例如在一个电力监测系统中,需要同时采集电压和电流信号。如果只有一路 ADC,就需要先采集电压信号,然后再采集电流信号,这样会花费较长的时间,尤其是在对实时性要求较高的情况下。而使用两路 ADC,可以同时对电压和电流信号进行采样,在同一时刻获取两个信号的值,减少了采样时间,提高了系统的响应速度。
- 实现信号同步测量
- 有些应用场景要求对多个模拟信号进行同步测量,以确保测量数据的准确性和相关性。以音频处理系统为例,在录制立体声音乐时,需要同时采集左右声道的音频信号。使用两路 ADC 可以保证左右声道的信号在同一时刻被采集,避免了因先后采样而导致的相位差和时间延迟问题,从而获得更真实、准确的立体声效果。
- 增加系统可靠性和灵活性
- 两路 ADC 可以互为备份,当其中一路 ADC 出现故障时,另一路 ADC 仍可以正常工作,保证系统的基本功能不受影响。同时,在不同的工作模式或测量需求下,可以灵活地分配两路 ADC 的任务。比如在一个环境监测系统中,平时可以使用一路 ADC 采集温度信号,另一路 ADC 采集湿度信号;在进行校准或特殊测量时,可以将两路 ADC 同时用于采集同一信号,以提高测量精度和可靠性。
- 满足复杂的信号处理需求
- 对于一些复杂的信号处理算法,可能需要同时对多个模拟信号进行不同的处理。例如在一个电机控制系统中,需要同时采集电机的电流和转速信号,通过两路 ADC 分别将这两个信号转换为数字信号后,可以根据这两个信号的实时值来实现更精确的电机控制算法,如矢量控制算法,提高电机的性能和效率。
如何使用 I2C 配置和读取温度传感器?
使用 I2C 配置和读取温度传感器通常需要以下步骤:
- 硬件连接
- 将温度传感器与微控制器通过 I2C 总线连接。一般来说,温度传感器的 SDA 引脚连接到微控制器的 I2C 数据引脚,SCL 引脚连接到微控制器的 I2C 时钟引脚。同时,要确保连接的稳定性和正确性,避免出现短路、断路等问题。还需要连接电源和接地引脚,为温度传感器提供合适的工作电压。
- 微控制器 I2C 初始化
- 在微控制器中,需要对 I2C 模块进行初始化设置。这包括设置 I2C 的工作模式、时钟频率、设备地址等。例如,设置 I2C 的时钟频率为 100kHz,根据温度传感器的手册确定其在 I2C 总线上的设备地址,一般为 7 位地址。通过配置相关寄存器,使微控制器的 I2C 模块能够正常工作并与温度传感器进行通信。
- 配置温度传感器
- 通过 I2C 向温度传感器发送配置命令,设置温度传感器的工作模式、分辨率、测量范围等参数。不同的温度传感器其配置命令和参数设置方法有所不同。以常见的 LM75 温度传感器为例,可以通过向其内部的寄存器写入特定的值来设置工作模式为连续转换模式或单次转换模式,设置分辨率为 9 位、10 位、11 位或 12 位等。
- 读取温度数据
- 在配置好温度传感器后,就可以通过 I2C 从温度传感器读取温度数据了。首先,向温度传感器发送读取数据的命令,然后微控制器通过 I2C 接收温度传感器返回的数据。一般温度传感器返回的温度数据是一个二进制值,需要根据其数据格式和分辨率进行转换和计算,才能得到实际的温度值。例如,LM75 温度传感器返回的是 16 位二进制数据,根据其手册中的公式,将二进制数据转换为对应的温度值,单位可能是摄氏度或华氏度等。
使用 ADC 进行温度测量的方法是什么?
使用 ADC(模数转换器)进行温度测量主要有以下方法:
- 传感器选择与连接
- 首先要选择合适的温度传感器,常见的有热敏电阻、热电偶、集成温度传感器等。例如,热敏电阻具有成本低、灵敏度高的特点,其电阻值随温度变化而变化。将热敏电阻与一个固定电阻组成分压电路,连接到 ADC 的输入引脚。当温度改变时,热敏电阻的阻值改变,从而导致分压值改变,这个分压值就是 ADC 要转换的模拟信号。对于热电偶,它能直接产生与温差有关的电动势,也可将其输出信号经放大等处理后连接到 ADC 输入。集成温度传感器如 LM35,能直接输出与温度成线性关系的电压信号,可直接连接 ADC。
- ADC 配置与初始化
- 对微控制器中的 ADC 模块进行配置。需设置 ADC 的参考电压,这决定了 ADC 的测量范围。比如,若参考电压为 3.3V,ADC 的测量范围就是 0 到 3.3V 对应的数字值。设置 ADC 的分辨率,常见的有 8 位、10 位、12 位等,分辨率越高,测量精度越高,但转换时间可能越长。还要设置 ADC 的采样时间和转换模式等,以确保能准确采集到温度传感器输出的模拟信号并进行转换。
- 信号采集与转换
- 通过 ADC 对温度传感器输出的模拟信号进行采集和转换。启动 ADC 转换后,等待转换完成,然后读取 ADC 转换结果寄存器中的数字值。这个数字值与温度传感器输出的模拟电压相对应。以 10 位 ADC 为例,若参考电压为 3.3V,那么数字值范围是 0 到 1023,对应 0 到 3.3V 的模拟电压。
- 温度计算与校准
- 根据温度传感器的特性和 ADC 的转换结果计算出实际温度值。对于热敏电阻,需依据其电阻 - 温度特性曲线,通过复杂的公式或查找表来计算温度。而对于 LM35 这种线性输出的传感器,可根据其灵敏度,如每摄氏度对应 10mV 的输出电压,轻松计算出温度。此外,为提高测量精度,还需进行校准,可通过测量已知温度点来校准测量误差,如在 0℃和 100℃时进行校准,调整测量参数以减小误差。
加速度计通常在什么场景下使用?其应用结论是什么?
加速度计在众多领域都有广泛应用,以下是一些常见场景及应用结论:
- 消费电子领域
- 智能手机与平板电脑:用于实现屏幕自动旋转功能。当用户改变设备的放置方向时,加速度计能感知到重力方向的变化,从而通知系统调整屏幕显示方向,为用户提供更好的使用体验。还可用于计步功能,通过检测人行走或跑步时的加速度变化,计算步数、行走距离和消耗的卡路里等。应用结论是极大地提升了设备的智能化和用户体验,让操作更加便捷自然 。
- 汽车电子领域
- 电子稳定控制系统(ESC):加速度计可实时监测车辆的加速度和减速度,与其他传感器配合,当检测到车辆有侧滑或失控趋势时,及时调整车轮的制动力和驱动力,保持车辆的稳定性和操控性。在车辆碰撞检测中,加速度计能快速检测到碰撞时的巨大加速度变化,触发安全气囊等被动安全系统,保护车内人员安全。其应用结论是提高了汽车的主动和被动安全性,降低了事故风险和损失。
- 工业自动化领域
- 振动监测与故障诊断:安装在机械设备上,加速度计可监测设备运行时的振动情况,通过分析振动的频率、幅度和相位等信息,判断设备是否存在故障,如轴承磨损、不平衡等问题,以便及时进行维护和维修,减少设备停机时间和维修成本。在机器人控制中,加速度计用于测量机器人手臂或关节的运动加速度,实现精确的运动控制和姿态调整,提高机器人的工作精度和效率。应用结论是增强了工业设备的可靠性和自动化水平,提高了生产效率和产品质量。
- 航空航天领域
- 飞行姿态控制:在飞机和卫星等飞行器中,加速度计是关键的传感器之一,用于测量飞行器的加速度和姿态变化,与陀螺仪等其他传感器协同工作,为飞行控制系统提供准确的姿态信息,确保飞行器的飞行安全和稳定性。在导弹制导系统中,加速度计可测量导弹的飞行加速度,结合其他导航信息,精确控制导弹的飞行轨迹,提高命中精度。其应用结论是保障了航空航天设备的高性能和可靠性,对于飞行任务的成功完成至关重要。
FreeRTOS 中如何实现任务的延时机制?
在 FreeRTOS 中,任务延时机制主要通过以下方式实现:
- 相对延时函数
- FreeRTOS 提供了相对延时函数 vTaskDelay ()。该函数的参数是一个以系统节拍数为单位的延时时间。当任务调用 vTaskDelay () 时,它会将自身置于阻塞态,放弃 CPU 使用权,等待指定的系统节拍数过去后,再由就绪态进入运行态继续执行后续代码。例如,如果系统节拍频率为 1000Hz,调用 vTaskDelay (1000) ,则任务会阻塞 1 秒钟。这种相对延时方式简单直观,适用于大多数不需要精确延时的场景,比如让一个任务周期性地执行某些操作,通过设置合适的延时时间来控制任务的执行周期。
- 绝对延时函数
- 除了相对延时函数,FreeRTOS 还提供了绝对延时函数 vTaskDelayUntil ()。与 vTaskDelay () 不同的是,vTaskDelayUntil () 需要传入一个指向绝对时间的指针和一个以系统节拍数为单位的时间间隔。任务会阻塞直到达到指定的绝对时间,然后按照设定的时间间隔周期性地执行。这在需要精确控制任务执行周期的场景中非常有用,例如在一些对时间同步要求较高的实时控制系统中,多个任务需要按照精确的时间间隔依次执行,使用 vTaskDelayUntil () 可以确保任务的精确周期性执行,避免因任务执行时间的不确定性而导致的时间误差积累。
- 系统节拍定时器
- 实现任务延时的基础是 FreeRTOS 的系统节拍定时器。系统节拍定时器以固定的频率产生中断,这个中断频率就是系统节拍频率。每产生一次中断,系统就会进行一次任务调度和时间管理操作。当任务调用延时函数时,系统会根据当前的系统节拍数和任务要求的延时时间,计算出任务应该被唤醒的时间点,并将任务放入相应的阻塞队列中。当系统节拍定时器的计数值达到任务的唤醒时间点时,系统会将任务从阻塞队列移到就绪队列,等待 CPU 调度执行。
在 FreeRTOS 中如何实现消息队列机制?
在 FreeRTOS 中,消息队列机制的实现主要涉及以下几个方面:
- 消息队列的创建
- 首先,需要使用函数 xQueueCreate () 来创建一个消息队列。该函数需要传入两个参数,一个是消息队列的长度,即队列中最多能存储的消息数量;另一个是每个消息的大小,以字节为单位。例如,创建一个长度为 10,每个消息大小为 4 字节的消息队列,可以使用 xQueueCreate (10, 4) 。创建成功后,函数会返回一个消息队列的句柄,后续对消息队列的操作都将通过这个句柄进行。
- 消息的发送
- FreeRTOS 提供了多种消息发送函数,如 xQueueSend () 、xQueueSendToFront () 等。xQueueSend () 函数用于将一个消息发送到消息队列的尾部,如果队列未满,消息会被成功放入队列,函数返回 pdTRUE;如果队列已满,根据配置的阻塞时间参数,任务可能会进入阻塞态等待队列有空间。xQueueSendToFront () 则是将消息发送到队列的头部。发送消息时,需要将要发送的消息内容的指针作为参数传入发送函数。例如,要发送一个整数类型的消息,可以先定义一个整数变量,将其值设置为要发送的消息内容,然后将该变量的指针传入发送函数。
- 消息的接收
- 消息接收通过函数 xQueueReceive () 等来实现。任务调用 xQueueReceive () 时,如果队列中有消息,函数会将消息从队列中取出并复制到指定的接收缓冲区中,同时返回 pdTRUE;如果队列中没有消息,根据设置的阻塞时间参数,任务可能会进入阻塞态等待有消息到来。接收消息时,需要提供一个接收缓冲区的指针,用于存储接收到的消息内容。
- 消息队列的删除
- 当不再需要某个消息队列时,可以使用函数 vQueueDelete () 来删除它。删除消息队列时,需要传入要删除的消息队列的句柄。需要注意的是,在删除消息队列之前,应该确保所有可能访问该队列的任务都已经停止使用它,否则可能会导致程序错误。
FreeRTOS 中如何实现任务的优先级动态调整?
在 FreeRTOS 中,实现任务优先级动态调整主要有以下方法:
- 直接设置优先级函数
- FreeRTOS 提供了函数 vTaskPrioritySet () 来直接设置任务的优先级。该函数需要传入两个参数,一个是要调整优先级的任务的句柄,另一个是新的优先级值。任务句柄可以在任务创建时获得,新的优先级值的范围是 0 到 (configMAX_PRIORITIES - 1),其中 0 为最低优先级,(configMAX_PRIORITIES - 1) 为最高优先级。例如,如果要将一个任务的优先级从 2 提升到 4,可以使用 vTaskPrioritySet (taskHandle, 4) ,其中 taskHandle 是该任务的句柄。通过这种方式,可以根据任务的运行情况和系统需求,随时灵活地调整任务的优先级,以满足不同任务对实时性的要求。
- 获取当前优先级函数
- 为了更好地进行优先级动态调整,FreeRTOS 还提供了函数 uxTaskPriorityGet (),用于获取任务的当前优先级。该函数只需要传入任务的句柄,就可以返回任务的当前优先级值。在进行优先级调整之前,可以先使用这个函数获取任务的当前优先级,然后根据需要进行合理的调整。例如,如果发现某个任务的执行时间过长,影响了其他高优先级任务的执行,可以先获取该任务的优先级,再根据情况适当降低其优先级,以保证系统的整体性能和实时性。
- 基于事件或条件的优先级调整
- 在实际应用中,常常需要根据某些事件或条件来动态调整任务的优先级。例如,在一个数据采集系统中,当有新的数据需要紧急处理时,可以提高负责数据处理任务的优先级。可以在任务中通过检测相关的事件标志或条件变量,当满足特定条件时,使用 vTaskPrioritySet () 函数来调整任务的优先级。这样可以使系统根据实际运行情况自动地优化任务的调度顺序,提高系统的响应速度和处理效率。
请简述 IIC 协议及其工作原理。IIC 协议最多能挂载多少个从设备?
IIC 协议简介
IIC(Inter-Integrated Circuit)即集成电路总线,是一种由 PHILIPS 公司开发的两线式串行总线,用于连接微控制器及其外围设备。它仅使用两根线,即串行数据线 SDA 和串行时钟线 SCL,就能实现多个设备之间的通信,具有简单、高效、占用资源少等优点,广泛应用于各种嵌入式系统中。
工作原理
- 总线上的设备角色:IIC 总线上的设备分为主设备和从设备。主设备负责发起通信、产生时钟信号和控制通信过程;从设备则响应主设备的请求,接收或发送数据。通常,微控制器作为主设备,而各类传感器、存储器等作为从设备。
- 数据传输格式:数据在 SDA 线上以字节为单位进行传输,每个字节为 8 位。在传输过程中,先传输高位(MSB),后传输低位(LSB)。主设备通过拉低 SCL 线来控制数据传输的开始和停止,当 SCL 为高电平时,SDA 线的电平变化表示数据传输;当 SCL 为低电平时,SDA 线可以进行电平切换,以准备下一位数据的传输。
- 起始条件和停止条件:主设备通过发送起始条件(SCL 为高时,SDA 由高电平变为低电平)来启动一次通信,通过发送停止条件(SCL 为高时,SDA 由低电平变为高电平)来结束通信。
- 地址识别与数据传输:主设备在发起通信时,先发送要访问的从设备的地址,地址也是 7 位或 10 位数据,后跟 1 位读写位,以表明是读操作还是写操作。总线上的每个从设备都有唯一的地址,从设备通过识别该地址来确定是否响应主设备的请求。如果地址匹配,从设备会根据读写位进行相应的数据接收或发送操作。
从设备数量限制
IIC 协议规定从设备地址为 7 位时,理论上最多可以挂载 128 个从设备。但由于其中一些地址被保留用于特殊用途,如全 0 地址用于广播呼叫,全 1 地址用于通用呼叫等,所以实际可挂载的从设备数量会少于 128 个,通常为 112 个左右 。当使用 10 位地址时,可挂载的从设备数量会更多,理论上可达 1024 个,但同样存在一些保留地址,实际数量也会有所减少。
为什么 AUTOSAR 中要有以太网状态机控制?请简述其原理和作用。
原因
在 AUTOSAR(汽车开放系统架构)中,以太网状态机控制是非常必要的,这主要是因为汽车电子系统的复杂性和对网络通信的高要求。随着汽车智能化、网联化的发展,车内需要传输大量的数据,如高清视频、传感器数据等,以太网以其高带宽、高速率的优势成为了汽车网络的重要组成部分。而以太网状态机控制能够有效地管理以太网通信,确保数据的可靠传输和系统的稳定运行。
原理
- 状态定义与转换:以太网状态机定义了多个状态,如初始化状态、待机状态、发送状态、接收状态、错误状态等。通过各种事件和条件来触发状态之间的转换。例如,当系统启动时,以太网控制器进入初始化状态,完成硬件初始化和相关配置后,根据是否有数据要发送或接收,转换到待机状态或相应的发送 / 接收状态。
- 事件驱动机制:状态机的运行基于事件驱动,这些事件可以是内部事件,如定时器超时、数据缓冲区满等,也可以是外部事件,如接收到网络数据包、上层应用的发送请求等。当某个事件发生时,状态机根据当前状态和事件类型,执行相应的操作并转换到新的状态。
- 与硬件的交互:以太网状态机与以太网控制器的硬件密切配合。它通过配置寄存器来控制硬件的工作模式,如设置发送和接收模式、波特率等。同时,状态机也会根据硬件反馈的状态信息,如发送完成、接收错误等,进行相应的状态转换和处理。
作用
- 确保通信可靠性:通过状态机的精确控制,可以对以太网通信的各个环节进行严格管理,及时发现和处理通信错误,如数据校验错误、帧丢失等,从而提高通信的可靠性,保证重要数据的准确传输,这对于汽车的安全关键系统至关重要。
- 提高系统稳定性:合理的状态机控制可以避免网络拥塞和资源冲突,确保以太网通信与其他系统任务协调运行。例如,在系统资源紧张时,通过状态机的调度,可以暂停非关键数据的传输,优先保障重要任务的网络需求,从而提高整个汽车电子系统的稳定性。
- 支持复杂网络拓扑和功能扩展:汽车电子系统中的网络拓扑日益复杂,可能包含多个以太网节点和不同类型的网络设备。以太网状态机控制可以灵活地适应各种网络拓扑结构,支持诸如网络唤醒、时间敏感网络(TSN)等高级功能的实现,满足汽车不断发展的智能化需求。
如何在嵌入式系统中实现图像识别?
在嵌入式系统中实现图像识别是一个具有挑战性但非常有意义的任务,通常需要以下几个主要步骤:
图像采集
首先需要通过图像传感器获取图像数据。常用的图像传感器有 CMOS 和 CCD 传感器,它们可以将光信号转换为电信号,再通过模数转换得到数字图像数据。这些传感器通常连接到嵌入式系统的相应接口,如 USB、CSI(摄像头串行接口)等。在采集图像时,需要考虑图像的分辨率、帧率、色彩模式等参数,根据具体的应用需求进行合理设置。例如,对于一些简单的目标检测应用,较低分辨率和帧率的图像可能就足以满足要求,同时可以降低系统的处理负担。
图像预处理
采集到的图像可能存在噪声、光照不均匀等问题,需要进行预处理以提高图像质量和后续处理的效率。预处理操作包括但不限于:
- 灰度化:将彩色图像转换为灰度图像,减少数据量和处理复杂度,因为在许多图像识别任务中,颜色信息并不是关键因素。
- 滤波:采用均值滤波、中值滤波等方法去除图像中的噪声,使图像更加清晰。例如,中值滤波对于去除椒盐噪声效果较好,可以保护图像的边缘信息。
- 直方图均衡化:用于增强图像的对比度,使图像的细节更加清晰,特别是在光照条件较差的情况下,可以改善图像的视觉效果,提高图像特征的可辨识度。
特征提取
这是图像识别的核心步骤之一,目的是从图像中提取出能够代表目标物体的特征。常见的特征提取方法有:
- ** Haar 特征 **:通过计算图像中不同区域的灰度差异来提取特征,常用于人脸检测等应用。它具有计算简单、对旋转和缩放有一定鲁棒性的优点。
- HOG 特征(方向梯度直方图):计算图像局部区域的梯度方向直方图,能够很好地描述图像的边缘和纹理信息,常用于行人检测、车辆检测等。
- SIFT 特征(尺度不变特征变换)和SURF 特征(加速稳健特征):这些特征对图像的尺度变化、旋转和光照变化具有较强的鲁棒性,常用于目标识别和图像匹配等任务,但计算复杂度相对较高,在资源有限的嵌入式系统中需要进行适当优化。
分类识别
根据提取的特征,使用分类器对图像中的目标进行分类识别。常用的分类器有:
- 神经网络:如卷积神经网络(CNN),在图像识别领域取得了巨大的成功。通过构建多层神经网络结构,自动学习图像的特征和分类模式。在嵌入式系统中,可以使用一些轻量级的 CNN 模型,如 MobileNet、Tiny YOLO 等,并进行模型压缩和优化,以适应有限的计算资源和存储资源。
- 支持向量机(SVM):基于统计学习理论的分类器,通过寻找一个最优的超平面来将不同类别的数据分开。SVM 在处理小样本、非线性问题上有较好的性能,且训练和分类速度相对较快,适用于一些对实时性要求较高的嵌入式图像识别应用。
- 决策树:通过一系列的条件判断对图像进行分类,具有简单易懂、计算效率高的优点,常用于一些简单的图像分类任务,如识别图像中的基本几何形状等。
结果输出与后处理
最后,将分类识别的结果进行输出和后处理。可以通过显示屏、指示灯、串口等方式将识别结果反馈给用户或其他系统模块。同时,根据具体应用需求,可能还需要进行一些后处理操作,如对识别出的目标进行定位、跟踪,或者根据多个识别结果进行综合判断和决策等。
算法:请描述双链表的插入和删除操作。
双链表插入操作
双链表是一种包含两个指针域的链表,每个节点除了存储数据外,还包含指向前驱节点和后继节点的指针。插入操作是在双链表的指定位置插入一个新节点,具体步骤如下:
- 创建新节点:首先,根据要插入的数据创建一个新的节点,并为其分配内存空间。新节点包含数据域和两个指针域,初始时指针域可设置为空或根据具体情况指向特定的节点。
- 找到插入位置:通过遍历双链表,找到要插入新节点的位置。可以根据节点的数据值或者其他特定的条件来确定插入位置。假设我们要在节点 p 之后插入新节点 q 。
- 插入新节点:将新节点 q 的前驱指针指向节点 p,后继指针指向节点 p 的后继节点。然后,将节点 p 的后继指针指向新节点 q,最后,将节点 q 的后继节点的前驱指针指向新节点 q。这样,新节点 q 就成功地插入到了双链表中节点 p 之后。
以代码片段示例(假设节点结构体包含数据域 data,前驱指针 prev 和后继指针 next):
// 创建新节点
struct Node* newNode = (struct Node*)malloc(sizeof(struct Node));
newNode->data = value; // 找到插入位置,假设p为已找到的要在其后插入的节点
newNode->prev = p;
newNode->next = p->next;if (p->next!= NULL) {p->next->prev = newNode;
}
p->next = newNode;
双链表删除操作
删除操作是从双链表中删除指定的节点,步骤如下:
- 找到要删除的节点:通过遍历双链表,根据节点的数据值或其他条件找到要删除的节点。假设要删除的节点为 p 。
- 更新指针:将节点 p 的前驱节点的后继指针指向节点 p 的后继节点。然后,将节点 p 的后继节点的前驱指针指向节点 p 的前驱节点。这样就将节点 p 从链表中分离出来了。
- 释放内存:最后,释放被删除节点 p 所占用的内存空间,以避免内存泄漏。
以下是代码示例:
// 假设p为要删除的节点
if (p->prev!= NULL) {p->prev->next = p->next;
}
if (p->next!= NULL) {p->next->prev = p->prev;
}
free(p);
通过这些插入和删除操作,双链表可以灵活地进行数据的存储和管理,方便在链表的任意位置进行元素的添加和删除,适用于许多需要动态数据结构的应用场景。
相关文章:
极智嘉嵌入式面试题及参考答案
对于交叉编译器的理解 交叉编译器是一种在一个计算机平台上为另一个不同架构的计算机平台生成可执行代码的编译器。它在嵌入式系统开发中起着关键作用。 从其必要性来看,嵌入式系统通常使用的处理器架构与我们日常使用的 PC 等通用计算机不同,如 ARM、MI…...

【MySQL】数据库核心技术与应用指南
数据库的各种概念 1. 指一门学科《数据库原理与应用》。(研究如何设计实现一个数据库) 2. 指一类用来管理数据的软件。 3. 指某一个具体的数据库软件。 4. 指部署了某个数据库软件的电脑。 数据库软件 关系型数据库 1. 使用 “表” 的结构来组织数据。…...

23省赛区块链应用与维护(房屋租凭)
23省赛区块链应用与维护(房屋租凭) 背景描述 随着异地务工人员的增多,房屋租赁成为一个广阔市场。目前,现有技术中的房屋租赁是由房主发布租赁信息,租赁信息发布在房屋中介或租赁软件,租客获取租赁信息后,现场看房,并签订纸质的房屋租赁合同,房屋租赁费用通过中介或…...

深度学习4
一、手动构建模型 epoch 一次完整数据的训练过程(可细分多次训练),称为 一代训练 Batch 小部分样本对权重的更新,称为 一批数据 iteration 使用一个 Batch 的过程,称为 一次训练 步骤: 1、生成 x,y 的…...

跳绳视觉计数方案
产品概述 提供基于摄像头视觉技术的跳绳计数解决方案,可精准完成跳绳动作的实时计数,效果完全满足考试水平的要求。方案采用先进的计算机视觉算法,结合高效的模型架构,确保计数的准确性和稳定性。适用场景 学校体育考试ÿ…...

TEA加密逆向
IDA伪代码 do{if ( v15 )v17 v38; // x120x0->0x79168ba790, 输入字符串经过check1处理后字符串elsev17 v40;v18 (unsigned int *)&v17[v16]; // 0x78cbbd47fc add x12, x12, x8 ; x120x79168ba790->…...

LeetCode 404.左叶子之和
题目:给定二叉树的根节点 root ,返回所有左叶子之和。 思路:一个节点为「左叶子」节点,当且仅当它是某个节点的左子节点,并且它是一个叶子结点。因此我们可以考虑对整 node 时,如果它的左子节点是一个叶子…...
01-go入门
文章目录 Go语言学习1. 简介安装windows安装linux安装编译工具安装-goland 2. 入门2.1 Helloworld注释 2.2 变量初始化打印内存地址变量交换匿名变量作用域局部变量全局变量 2.3 常量iota 2.4 数据类型布尔整数浮点类型复数字符串定义字符串字符串拼接符定义多行字符串 map数据…...

【经典】抽奖系统(HTML,CSS、JS)
目录 1、添加参与者 2、多次添加 3、点击抽奖 功能介绍: 使用方法: 完整代码: 一个简单但功能强大的抽奖系统的示例,用于在网页上实现抽奖。 1、添加参与者 2、多次添加 3、点击抽奖 功能介绍: 参与者添加&…...

GoF设计模式——结构型设计模式分析与应用
文章目录 UML图的结构主要表现为:继承(抽象)、关联 、组合或聚合 的三种关系。1. 继承(抽象,泛化关系)2. 关联3. 组合/聚合各种可能的配合:1. 关联后抽象2. 关联的集合3. 组合接口4. 递归聚合接…...
Java后端如何进行文件上传和下载 —— 本地版
简介: 本文详细介绍了在Java后端进行文件上传和下载的实现方法,包括文件上传保存到本地的完整流程、文件下载的代码实现,以及如何处理文件预览、下载大小限制和运行失败的问题,并提供了完整的代码示例。 大体思路 1、文件上传 …...

json格式数据集转换成yolo的txt格式数据集
这个代码是参考了两个博客 我是感觉第一篇博客可能有问题,然后自己做了改进,如果我是错误的或者正确的,请各位评论区说一下,感谢 Json格式的数据集标签转化为有效的txt格式(data_coco)_train.json-CSDN博客 COCO(.j…...

什么是Three.js,有什么特点
什么是 Three.js? Three.js 是一个基于 WebGL 技术的 JavaScript 3D 库。它允许开发者在网页上创建和展示 3D 图形内容,而无需用户安装任何额外的插件或软件。Three.js 简化了 WebGL 的复杂性,使得即便是对图形编程不太熟悉的人也能快速上手…...

Linux笔记--基于OCRmyPDF将扫描件PDF转换为可搜索的PDF
1--官方仓库 https://github.com/ocrmypdf/OCRmyPDF 2--基本步骤 # 安装ocrmypdf库 sudo apt install ocrmypdf# 安装简体中文库 sudo apt-get install tesseract-ocr-chi-sim# 转换 # -l 表示使用的语言 # --force-ocr 防止出现以下错误:ERROR - PriorOcrFoundE…...

Unity 导出 Xcode 工程 修改 Podfile 文件
Unity 导出 Xcode 工程 修改 Podfile 文件 在 Editor 文件夹下新建 xxx.cs 脚本 实现静态方法 [PostProcessBuild]public static void OnPostprocessBuild(BuildTarget target, string pathToBuiltProject){// Unity 导出 Xcode 工程自动调用这个方法 }using System.IO; using…...

UE5 slate BlankProgram独立程序系列
源码版Engine\Source\Programs\中copy BlankProgram文件夹,重命名为ASlateLearning,修改所有文件命名及内部名称。 ASlateLearning.Target.cs // Copyright Epic Games, Inc. All Rights Reserved.using UnrealBuildTool; using System.Collections.Ge…...
内存不足引发C++程序闪退崩溃问题的分析与总结
目录 1、内存不足一般出现在32位程序中 2、内存不足时会导致malloc或new申请内存失败 2.1、malloc申请内存失败,返回NULL 2.2、new申请内存失败,抛出异常 3、内存不足项目实战案例中相关细节与要点说明 3.1、内存不足导致malloc申请内存失败&#…...
C++ —— 以真我之名 如飞花般绚丽 - 智能指针
目录 1. RAII和智能指针的设计思路 2. C标准库智能指针的使用 2.1 auto_ptr 2.2 unique_ptr 2.3 简单模拟实现auto_ptr和unique_ptr的核心功能 2.4 shared_ptr 2.4.1 make_shared 2.5 weak_ptr 2.6 shared_ptr的缺陷:循环引用问题 3. shared_ptr 和 unique_…...

Linux中安装InfluxDB
什么是InfluxDB InfluxDB是一个开源的时间序列数据库,专为处理时间序列数据而设计。时间序列数据是指带有时间戳的数据点,例如传感器数据、应用程序日志、服务器指标等。InfluxDB 由 InfluxData 公司开发,广泛应用于物联网(IoT&am…...

nginx服务器实现上传文件功能_使用nginx-upload-module模块
目录 conf文件内容如下html文件内容如下上传文件功能展示 conf文件内容如下 #user nobody; worker_processes 1;error_log /usr/logs/error.log; #error_log /usr/logs/error.log notice; #error_log /usr/logs/error.log info;#pid /usr/logs/nginx.pid;events …...

51c自动驾驶~合集58
我自己的原文哦~ https://blog.51cto.com/whaosoft/13967107 #CCA-Attention 全局池化局部保留,CCA-Attention为LLM长文本建模带来突破性进展 琶洲实验室、华南理工大学联合推出关键上下文感知注意力机制(CCA-Attention),…...
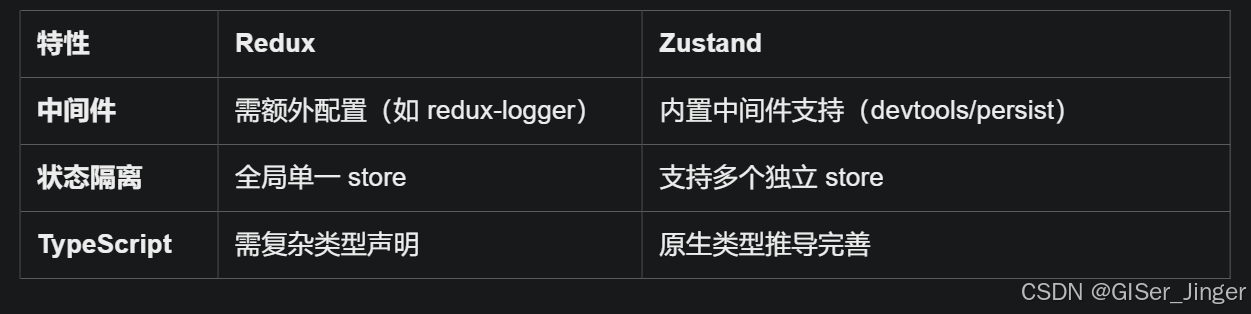
Zustand 状态管理库:极简而强大的解决方案
Zustand 是一个轻量级、快速和可扩展的状态管理库,特别适合 React 应用。它以简洁的 API 和高效的性能解决了 Redux 等状态管理方案中的繁琐问题。 核心优势对比 基本使用指南 1. 创建 Store // store.js import create from zustandconst useStore create((set)…...

鸿蒙中用HarmonyOS SDK应用服务 HarmonyOS5开发一个医院挂号小程序
一、开发准备 环境搭建: 安装DevEco Studio 3.0或更高版本配置HarmonyOS SDK申请开发者账号 项目创建: File > New > Create Project > Application (选择"Empty Ability") 二、核心功能实现 1. 医院科室展示 /…...

生成 Git SSH 证书
🔑 1. 生成 SSH 密钥对 在终端(Windows 使用 Git Bash,Mac/Linux 使用 Terminal)执行命令: ssh-keygen -t rsa -b 4096 -C "your_emailexample.com" 参数说明: -t rsa&#x…...
详解:相对定位 绝对定位 固定定位)
css的定位(position)详解:相对定位 绝对定位 固定定位
在 CSS 中,元素的定位通过 position 属性控制,共有 5 种定位模式:static(静态定位)、relative(相对定位)、absolute(绝对定位)、fixed(固定定位)和…...

如何在最短时间内提升打ctf(web)的水平?
刚刚刷完2遍 bugku 的 web 题,前来答题。 每个人对刷题理解是不同,有的人是看了writeup就等于刷了,有的人是收藏了writeup就等于刷了,有的人是跟着writeup做了一遍就等于刷了,还有的人是独立思考做了一遍就等于刷了。…...

IP如何挑?2025年海外专线IP如何购买?
你花了时间和预算买了IP,结果IP质量不佳,项目效率低下不说,还可能带来莫名的网络问题,是不是太闹心了?尤其是在面对海外专线IP时,到底怎么才能买到适合自己的呢?所以,挑IP绝对是个技…...

PostgreSQL——环境搭建
一、Linux # 安装 PostgreSQL 15 仓库 sudo dnf install -y https://download.postgresql.org/pub/repos/yum/reporpms/EL-$(rpm -E %{rhel})-x86_64/pgdg-redhat-repo-latest.noarch.rpm# 安装之前先确认是否已经存在PostgreSQL rpm -qa | grep postgres# 如果存在࿰…...

wpf在image控件上快速显示内存图像
wpf在image控件上快速显示内存图像https://www.cnblogs.com/haodafeng/p/10431387.html 如果你在寻找能够快速在image控件刷新大图像(比如分辨率3000*3000的图像)的办法,尤其是想把内存中的裸数据(只有图像的数据,不包…...

破解路内监管盲区:免布线低位视频桩重塑停车管理新标准
城市路内停车管理常因行道树遮挡、高位设备盲区等问题,导致车牌识别率低、逃费率高,传统模式在复杂路段束手无策。免布线低位视频桩凭借超低视角部署与智能算法,正成为破局关键。该设备安装于车位侧方0.5-0.7米高度,直接规避树枝遮…...