(四)3D视觉机器人的手眼标定(眼在手外)
内容
- 1.背景介绍
- 1.1 思路
- T_target_to_cam求解
- 公式求解
- 2.操作流程
1.背景介绍
3D视觉机器人指的是机器人通过3D相机提供的3D点云视觉信息,完成某些实际的功能。
目标是将场景信息从相机坐标系变换至机械臂坐标系中,最终是获得相机到机械臂基座的空间变换矩阵。
下面以眼在手外标定为例:

上图中,相机④固定在工作空间中,标定板③被固定在机械臂末端②上,为了做手眼标定在末端上固定一个标定板。
标定过程中标定板③和机械臂末端②固定位姿不变,由上图可知,相机④和机械臂基座①的相对位置不变,然后通过示教器控制机械臂带着标定板③在不同的位姿下进行拍照,拍照的过程中保存当前拍到的标定板图片以及记录图片对应示教器上的世界坐标。
眼在手外标定的目的是求出相机④坐标系到机械臂基座标系①的变换矩阵。
1.1 思路

眼在手外标定可以理解为上述坐标系转换的关系,其中③可由机械臂示教器上的数值直接获取,④由于是固定不变的,后面可通过计算进行消除。目标是求出相机相对于机械臂基座坐标系的位姿。
T_target_to_cam求解
T_target_to_cam可以理解是齐次矩阵,是由R_target_to_cam(旋转矩阵)和平移向量t_target_to_cam组成。

其中R_target_to_cam(旋转矩阵)可以由三个单位向量来表示,下面需要建立这个单位向量。

这里使用的标定板是棋盘格标定板,可以通过OpenCV中的函数寻找到棋盘格上的每个角点像素坐标系,以左上角第一个角点作为原点,和右上角的角点相连作为X轴正方向,和左下角的角点相连作为Y轴正方向,计算它们的单位向量Vx和Vy,Vz可由Vx和Vy叉乘得到。

PS:这里选择右上角的角点和左下角的角点,和原点相连是为了提高精度。
因为使用的是3D相机,可以知道左上角角点的像素坐标和深度信息,通过相机内参将像素坐标转换为实际物理坐标(相机坐标系下),则t_target_to_cam平移向量可以得到。
公式求解

上面的公式中,①可以通过上面的方法求解,③是已知值,将等式两边左乘T_base_to_cam逆矩阵和T_end_to_base逆矩阵,可以将T_target_to_end单独放在等式右边,输入两组值,由于目标(标定板相对于机械臂末端的位姿关系固定)T_target_to_end相等,可以将两组值直接相等,去除T_target_to_end。
剩下的就是AX = XB求解,输入多组值即可求出相机相对于机械臂基座坐标系的位姿,即T_cam_to_base。
2.操作流程
操作流程基本和眼在手外标定流程相同,只是这里相机是不变的,需要将标定板固定到机械臂的末端,参考:https://blog.csdn.net/qq_45445740/article/details/123947559
上面提到的计算
T_target_to_cam通过建立坐标系的方法进行求解,作为一个求解思路,OpenCV中有现成的函数直接进行求解,calibrateCamera,可以计算眼在手上和眼在手外,只是输入的参数不同。
感谢视频讲解:https://www.bilibili.com/video/BV1Rw411d7ch/?spm_id_from=333.880.my_history.page.click
相关文章:
(四)3D视觉机器人的手眼标定(眼在手外)
内容 1.背景介绍1.1 思路T_target_to_cam求解公式求解 2.操作流程 1.背景介绍 3D视觉机器人指的是机器人通过3D相机提供的3D点云视觉信息,完成某些实际的功能。 目标是将场景信息从相机坐标系变换至机械臂坐标系中,最终是获得相机到机械臂基座的空间…...

安达发|制造业APS智能优化排产软件的四类制造模型解决方案
在制造业中,APS(高级计划和排程系统)智能优化排产软件的应用越来越广泛。它通过集成先进的算法和模型,帮助企业提高生产效率、降低成本并提升客户满意度。针对不同类型的生产需求,APS软件提供了四类制造模型解决方案&a…...

命令行使用ssh隧道连接远程mysql
本地电脑A 跳板机B 主机2.2.2.2 用户名 B ssh端口号22 登录密码bbb 远程mysql C 地址 3.3.3.3 端口号3306 用户名C 密码ccc A需要通过跳板机B才能访问C; navicat中配置ssh可以实现在A电脑上访问C 如何实现本地代码中访问C呢? # 假设本地使…...

力扣第 71 题 简化路径
一、题目描述 给定一个字符串 path,表示一个由目录名和斜杠 "/" 组成的绝对路径,请简化该路径,使其变为规范路径。 在 Unix 风格的文件系统中: 一个点 "." 表示当前目录本身;两个点 "..&q…...

使用ENSP实现OSPF
一、项目拓扑 二、项目实现 1.路由器AR1配置 进入系统试图 sys将路由器命名为R1 sysname R1关闭信息中心 undo info-center enable 进入g0/0/0接口 int g0/0/0将g0/0/0接口IP地址配置为1.1.1.1/24 ip address 1.1.1.1 24进入g0/0/1接口 int g0/0/1将g0/0/1接口IP地址配置为2…...

分布式下怎么优化处理数据,怎么代替Join
分布式下怎么优化处理数据,怎么代替Join 简单来说, 可以采用 数据冗余,有意地存储一些重复的数据,以此减少关联查询的需求 数据拆分与多次查询,将一次获取的多表数据,拆分多个单独的查询 使用数据仓库…...

51单片机快速入门之中断的应用 2024/11/23 串口中断
51单片机快速入门之中断的应用 基本函数: void T0(void) interrupt 1 using 1 { 这里放入中断后需要做的操作 } void T0(void): 这是一个函数声明,表明函数 T0 不接受任何参数,并且不返回任何值。 interrupt 1: 这是关键字和参…...

[Java]微服务配置管理
介绍 代码拆分为微服务后, 每个服务都有自己的配置文件, 而这些配置文件中有很多重复的配置, 并且配置变化后需要重启服务, 才能生效, 这样就会影响开发体验和效率 配置管理服务可以帮助我们集中管理公共的配置, 并且nacos就可以实现配置管理服务 配置共享 我们可以把微服务共…...

c/c++ 用easyx图形库写一个射击游戏
#include <graphics.h> #include <conio.h> #include <stdlib.h> #include <time.h>// 定义游戏窗口的大小 #define WINDOW_WIDTH 800 #define WINDOW_HEIGHT 600// 定义玩家和目标的尺寸 #define PLAYER_SIZE 50 #define TARGET_SIZE 20// 玩家的结构…...

Rust eyre 错误处理实战教程
在《Rust 错误处理库: thiserror 和 anyhow》中我们介绍了Rust简化处理错误策略,本文解释eyre错误处理库,并通过多个实际示例进行说明,最后于anyhow库进行对比,让你更好理解其应用场景。 eyre是一个用于 Rust 的错误处理库&#x…...

面试小札:JVM虚拟机
1. 定义与基本概念 - JVM(Java Virtual Machine)即Java虚拟机,是Java程序的运行核心。它是一个虚构出来的计算机,通过在实际的计算机上仿真模拟各种计算机功能来运行Java字节码。字节码是一种中间格式,它使得Java程序能…...
)
Docker扩容操作(docker总是空间不足)
Docker扩容操作(docker总是空间不足) 1、df二连,一共也就70g,总是占满93%以上。所以需要移动到其他目录上 查看docker镜像和容器存储目录的空间大小 du -sh /var/lib/docker/2、停止docker服务 systemctl stop docker3、首先创建目录并迁移 # 首先创…...

数字图像处理(4):FPGA中的定点数、浮点数
(1)定点数:小数点固定在数据的某一位置的数,可以分为定点整数和定点小数和普通定点数。定点数广泛应用于数字图像处理(图像滤波、图像缩放)和数字信号处理(如FFT、定点卷积)中。 定…...

毕昇入门学习
schemas.py 概述 这段代码主要定义了一系列基于 Pydantic 的数据模型(BaseModel),用于数据验证和序列化,通常用于构建 API(如使用 FastAPI)。这些模型涵盖了用户认证、聊天消息、知识库管理、模型配置等多…...

2411C++,学习C++提示4
结构绑定 auto [first, ...ts] std::tuple{1, 2 ,3};assert(1 first);浮点作为非类型模板参数 template<double Value> constexpr auto value Value;int main() {std::cout << value<4.2>; // prints 4.2 }template<double... Vl1s, double... Vl2s&g…...

STM32-- 看门狗--介绍、使用场景、失效场景
STM32 中的看门狗(Watchdog Timer,简称 WDG)有两种主要类型:独立看门狗(IWDG) 和 窗口看门狗(WWDG)。它们的喂狗机制各有特点,主要区别如下: 1. 独立看门狗&a…...

【赵渝强老师】PostgreSQL的数据库
PostgreSQL的逻辑存储结构主要是指数据库中的各种数据库对象,包括:数据库集群、数据库、表、索引、视图等等。所有数据库对象都有各自的对象标识符oid(object identifiers),它是一个无符号的四字节整数,相关对象的oid都…...

linux安全管理-会话安全
文章目录 1 设置命令行界面超时退出2 配置终端登录失败策略3 配置 SSH 登录失败策略 1 设置命令行界面超时退出 1、检查内容 检查操作系统是否设置命令行界面超时退出。 2、配置要求 操作系统设置命令行界面超时退出。 3、配置方法 配置命令行界面超时时间,编辑/et…...

Ubuntu监视显卡占用情况
在终端中运行 watch -n 0.5 nvidia-smi【以下内容由大模型生成】 watch -n 0.5 nvidia-smi 是一个组合命令,用于在 Linux 终端中定期执行 nvidia-smi 命令并显示其输出。让我们分解一下这个命令的各个部分: watch: watch 是一个用于定期执行其他命令并显…...

学成在线day06
上传视屏 断点续传 通常视频文件都比较大,所以对于媒资系统上传文件的需求要满足大文件的上传要求。http协议本身对上传文件大小没有限制,但是客户的网络环境质量、电脑硬件环境等参差不齐,如果一个大文件快上传完了网断了没有上传完成&…...
)
浏览器访问 AWS ECS 上部署的 Docker 容器(监听 80 端口)
✅ 一、ECS 服务配置 Dockerfile 确保监听 80 端口 EXPOSE 80 CMD ["nginx", "-g", "daemon off;"]或 EXPOSE 80 CMD ["python3", "-m", "http.server", "80"]任务定义(Task Definition&…...
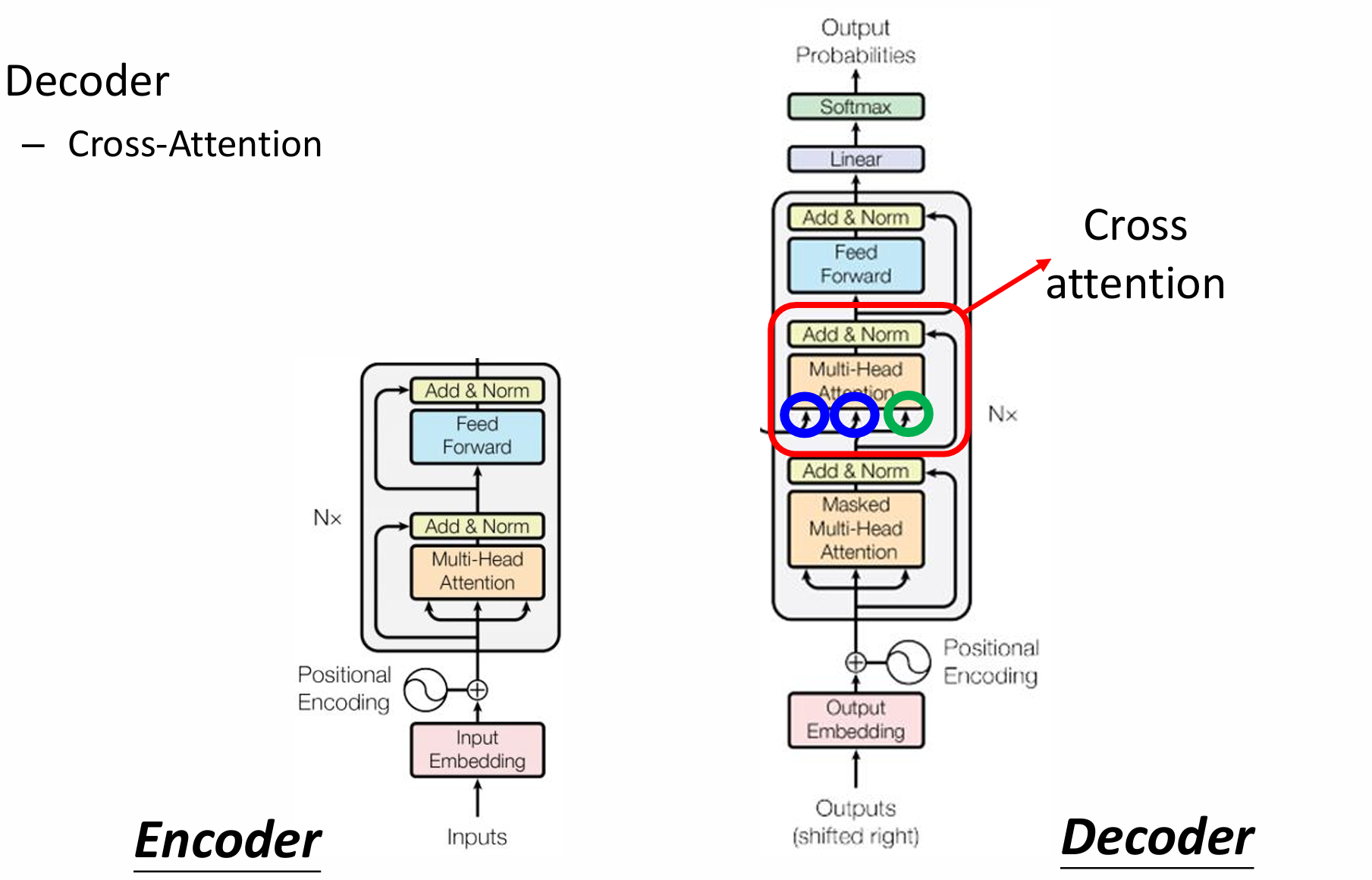
自然语言处理——Transformer
自然语言处理——Transformer 自注意力机制多头注意力机制Transformer 虽然循环神经网络可以对具有序列特性的数据非常有效,它能挖掘数据中的时序信息以及语义信息,但是它有一个很大的缺陷——很难并行化。 我们可以考虑用CNN来替代RNN,但是…...

在鸿蒙HarmonyOS 5中使用DevEco Studio实现录音机应用
1. 项目配置与权限设置 1.1 配置module.json5 {"module": {"requestPermissions": [{"name": "ohos.permission.MICROPHONE","reason": "录音需要麦克风权限"},{"name": "ohos.permission.WRITE…...

UR 协作机器人「三剑客」:精密轻量担当(UR7e)、全能协作主力(UR12e)、重型任务专家(UR15)
UR协作机器人正以其卓越性能在现代制造业自动化中扮演重要角色。UR7e、UR12e和UR15通过创新技术和精准设计满足了不同行业的多样化需求。其中,UR15以其速度、精度及人工智能准备能力成为自动化领域的重要突破。UR7e和UR12e则在负载规格和市场定位上不断优化…...

聊一聊接口测试的意义有哪些?
目录 一、隔离性 & 早期测试 二、保障系统集成质量 三、验证业务逻辑的核心层 四、提升测试效率与覆盖度 五、系统稳定性的守护者 六、驱动团队协作与契约管理 七、性能与扩展性的前置评估 八、持续交付的核心支撑 接口测试的意义可以从四个维度展开,首…...
短视频矩阵系统文案创作功能开发实践,定制化开发
在短视频行业迅猛发展的当下,企业和个人创作者为了扩大影响力、提升传播效果,纷纷采用短视频矩阵运营策略,同时管理多个平台、多个账号的内容发布。然而,频繁的文案创作需求让运营者疲于应对,如何高效产出高质量文案成…...
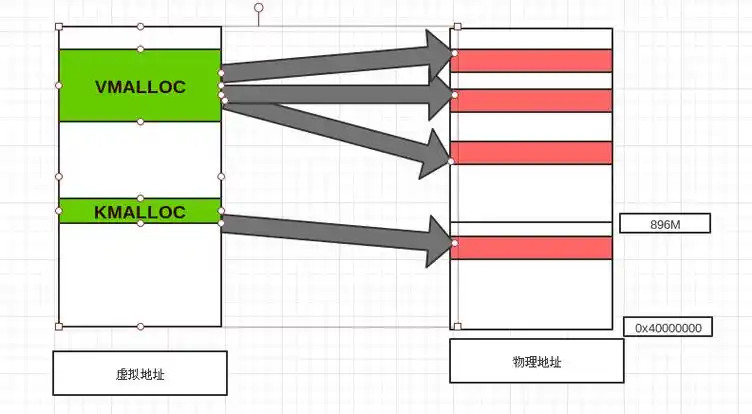
Linux 内存管理实战精讲:核心原理与面试常考点全解析
Linux 内存管理实战精讲:核心原理与面试常考点全解析 Linux 内核内存管理是系统设计中最复杂但也最核心的模块之一。它不仅支撑着虚拟内存机制、物理内存分配、进程隔离与资源复用,还直接决定系统运行的性能与稳定性。无论你是嵌入式开发者、内核调试工…...

GruntJS-前端自动化任务运行器从入门到实战
Grunt 完全指南:从入门到实战 一、Grunt 是什么? Grunt是一个基于 Node.js 的前端自动化任务运行器,主要用于自动化执行项目开发中重复性高的任务,例如文件压缩、代码编译、语法检查、单元测试、文件合并等。通过配置简洁的任务…...
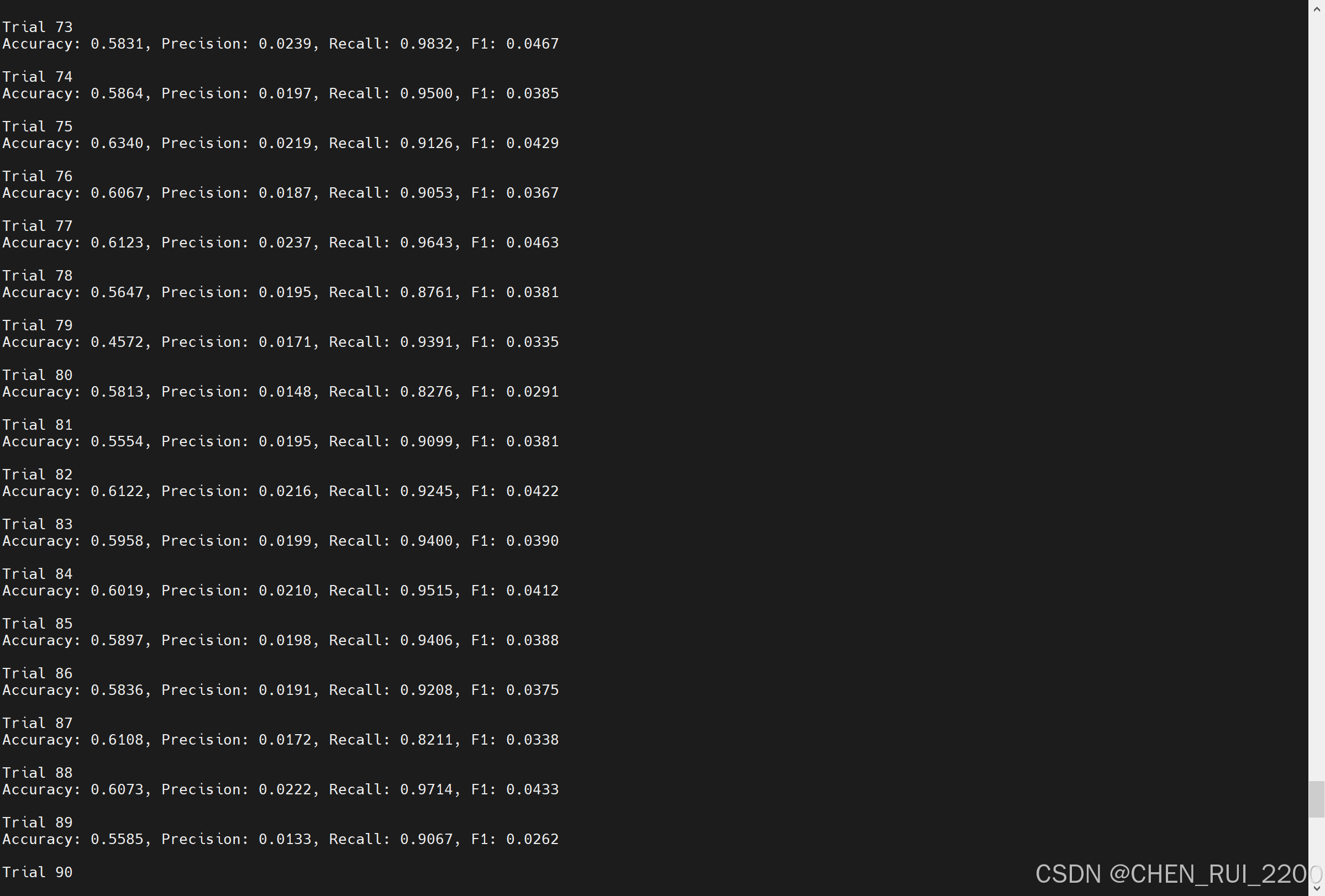
逻辑回归暴力训练预测金融欺诈
简述 「使用逻辑回归暴力预测金融欺诈,并不断增加特征维度持续测试」的做法,体现了一种逐步建模与迭代验证的实验思路,在金融欺诈检测中非常有价值,本文作为一篇回顾性记录了早年间公司给某行做反欺诈预测用到的技术和思路。百度…...

什么是VR全景技术
VR全景技术,全称为虚拟现实全景技术,是通过计算机图像模拟生成三维空间中的虚拟世界,使用户能够在该虚拟世界中进行全方位、无死角的观察和交互的技术。VR全景技术模拟人在真实空间中的视觉体验,结合图文、3D、音视频等多媒体元素…...